第11章 习题解答(齿轮传动) (2)
- 格式:ppt
- 大小:737.50 KB
- 文档页数:13
齿轮传动习题答案齿轮传动习题答案齿轮传动是机械工程中常见的一种传动方式,广泛应用于各类机械设备中。
在学习齿轮传动的过程中,我们常常会遇到一些习题,通过解答这些习题可以更好地理解和掌握齿轮传动的原理和计算方法。
本文将针对一些常见的齿轮传动习题,给出详细的答案和解析。
习题一:一个齿轮传动系统由两个齿轮组成,齿轮A的齿数为20,齿轮B的齿数为40,齿轮A的转速为1000转/分钟,求齿轮B的转速。
答案:根据齿轮传动的原理,齿轮传动的转速比等于从动齿轮的齿数与主动齿轮的齿数之比。
因此,齿轮B的转速可以通过以下公式计算:转速B = 转速A * (齿数A / 齿数B)代入已知数据,得到:转速B = 1000 * (20 / 40) = 500转/分钟因此,齿轮B的转速为500转/分钟。
习题二:一个齿轮传动系统由主动齿轮和从动齿轮组成,主动齿轮的齿数为30,从动齿轮的齿数为60,主动齿轮的转速为1000转/分钟,求从动齿轮的转速。
答案:同样根据齿轮传动的原理,齿轮传动的转速比等于从动齿轮的齿数与主动齿轮的齿数之比。
因此,从动齿轮的转速可以通过以下公式计算:转速从动 = 转速主动 * (齿数主动 / 齿数从动)代入已知数据,得到:转速从动 = 1000 * (30 / 60) = 500转/分钟因此,从动齿轮的转速为500转/分钟。
习题三:一个齿轮传动系统由主动齿轮和从动齿轮组成,主动齿轮的模数为2mm,从动齿轮的模数为4mm,主动齿轮的转速为1000转/分钟,求从动齿轮的转速。
答案:根据齿轮传动的原理,齿轮传动的转速比等于从动齿轮的齿数与主动齿轮的齿数之比。
而齿数与模数之间的关系为:齿数 = 齿轮直径 / 模数因此,可以通过以下公式计算从动齿轮的转速:转速从动 = 转速主动 * (齿数主动 / 齿数从动)代入已知数据,得到:转速从动 = 1000 * (齿轮直径主动 / 模数主动) / (齿轮直径从动 / 模数从动)由于题目未给出具体的齿轮直径数据,无法计算从动齿轮的转速。
一、填空题:1.轮系可以分为:定轴轮系和 周转轮系 。
2.定轴轮系是指:当轮系运动时,各轮轴线位置固定不动的轮系;周转轮系是指:轮系运动时,凡至少有一个齿轮的轴线是绕另一齿轮的轴线转动的轮系。
3.周转轮系的组成部分包括: 太阳轮 、 行星轮 和 行星架 。
4.行星轮系具有 1个自由度,差动轮系有 2自由度。
5、行星轮系的同心条件是指:要使行星轮系能正常运转,其基本构件的回转线必须在同一直线上。
6、确定行星轮系中各轮齿数的条件包括:传动比条件、同心条件、均布条件、邻接条件。
7、正号机构和负号机构分别是指:转化轮系的传动比H 1n i 为正号或者负号的周转轮系。
动力传动中多采用 负号 机构。
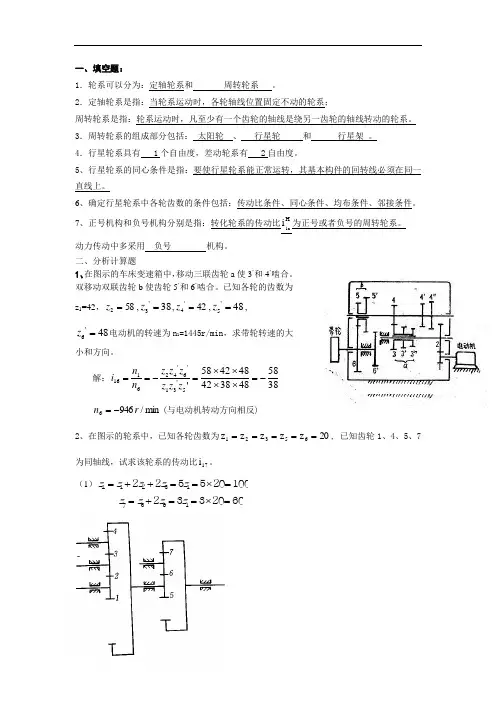
二、分析计算题 1、在图示的车床变速箱中,移动三联齿轮a 使3’和4’啮合。
双移动双联齿轮b 使齿轮5’和6’啮合。
已知各轮的齿数为z 1=42,582=z ,38'3=z ,42'4=z ,48'5=z ,48'6=z 电动机的转速为n 1=1445r/min ,求带轮转速的大小和方向。
解:3858483842484258'5'31'6'426116-=⨯⨯⨯⨯=-==z z z z z z n n i min /9466r n -=(与电动机转动方向相反)2、在图示的轮系中,已知各轮齿数为20z z z z z 65321=====, 已知齿轮1、4、5、7为同轴线,试求该轮系的传动比17i 。
(1)z z z z z 41231225520100=++==⨯=z z z z 75612332060=+==⨯=(2)iz z z z zz z z z z17323467123561=-()=-⨯⨯=-100602020153、在图示轮系中,已知:蜗杆为单头且右旋,转速n11440= r/min,转动方向如图示,其余各轮齿数为:402=z,20'2=z,303=z,18'3=z,544=z,试:(1)说明轮系属于何种类型;(2)计算齿轮4得转速n4;(3)在图中标出齿轮4的转动方向。
第十一章齿轮传动7-36.一般开式齿轮传动的主要失效形式是_________和_________;闭式齿轮传动的主要失效形式是_________和_________;又闭式软齿面齿轮传动的主要失效形式是_________;闭式硬齿面齿轮传动的主要失效形式是_________。
7-37.对于闭式软齿面齿轮传动,主要失效形式为_________,一般是按_________强度进行设计,按_________强度进行校核,这时影响齿轮强度的最主要几何参数是_________;7-38.对于开式齿轮传动,虽然主要失效形式是_________,但通常只按_________强度计算。
这时影响齿轮强度的主要几何参数是_________。
7-39.在齿轮传动中,齿面疲劳点蚀是由于_________的反复作用而产生的,点蚀通常首先出现在_________。
7-40.齿轮设计中,对闭式软齿面传动,当直径d1一定,一般z1选得_________些;对闭式硬齿面传动,则取_________的齿数z1,以使_________增大,提高轮齿的弯曲疲劳强度;对开式齿轮传动,一般z1选得_________些。
7-41.设计圆柱齿轮传动时,当齿轮_________布置时,其齿宽系数φd可选得大些。
7-42.对软齿面(硬度≤350 HBS)齿轮传动,当两齿轮均采用45钢时,一般采用的热处理方式为:小齿轮_________,大齿轮_________。
7-43.减小齿轮内部动载荷的措施有_________、_________、_________。
7-44.斜齿圆柱齿轮的齿形系数Y Fa与齿轮的参数_________、_________ 和________有关;而与_________无关。
7-45.影响齿轮齿面接触应力σH的主要几何参数是________和________;而影响其极限接触应力σHlim的主要因素是_________和_________。
第11章齿轮传动一、选择题[1]为了使相啮合的一对齿轮其强度和寿命接近,通常( )。
A、大齿轮的硬度大于小齿轮的硬度B、小齿轮的硬度大于大齿轮的硬度C、大、小齿轮的硬度相同[2]一对相啮合的圆柱齿轮的Z2>Z1,b1>b2,其接触应力的大小是()。
A、σH1=σH2B、σH1<σH2C、σH1>σH2D、可能相等,也可能不等[3]在一般工作条件下,齿面硬度HB≤350的闭式钢制齿轮传动,通常的主要失效形式为()。
A、轮齿疲劳折断B、齿面疲劳点蚀C、齿面胶合D、齿面塑性变形[4]齿轮传动中,轮齿的齿面疲劳点蚀,通常首先发生在()。
A、齿顶部份B、靠近节线的齿顶部份C、齿根部份D、靠近节线的齿根部份[5]开式齿轮传动的主要失效形式是()。
A、过载折断B、齿面胶合C、齿面点蚀D、齿面磨损[6]一对啮合齿轮,使小齿轮齿宽略大于大齿轮齿宽的目的是()。
A、提高小齿轮齿根弯曲强度B、补偿安装误差,保证全齿宽接触C、减小小齿轮载荷分布不均D、减小小齿轮齿根弯曲强度[7]齿面点蚀多半发生在()。
A、齿顶附近B、齿根附近C、节点附近D、基圆附近[8]为了有效地提高齿面接触强度,可()。
A、保持分度圆直径不变而增大模数B、增大分度圆直径C、保持分度圆直径不变而增加齿数的主要几何参数是()。
[9]对于标准齿轮传动,影响齿形系数YFA、齿轮的模数B、齿轮的压力角C、齿轮的齿数D、齿轮的顶隙系数[10]圆柱齿轮传动,当齿轮直径不变,而减小模数时,可以()。
A、提高轮齿的弯曲强度B、提高轮齿的接触强度C、提高轮齿的静强度D、改善传动的平稳性[11]一般参数的闭式硬齿面齿轮传动的主要失效形式是()。
A、齿面点蚀B、轮齿折断C、齿面塑性变形D、齿面胶合[12]设计一般闭式齿轮传动时,计算接触疲劳强度是为了避免()失效。
A、胶合B、磨粒磨损C、齿面点蚀D、轮齿折断[13]设计一般闭式齿轮传动时,齿根弯曲疲劳强度主要针对的失效形式是()。

第11章 齿轮传动精选例题与解析例11-1 二级圆柱齿轮减速器,其中一级为直齿轮,另一级为斜齿轮。
试问斜齿轮传动应置于高速级还是低速级?为什么?若为直齿锥齿轮和圆柱齿轮组成减速器,锥齿轮传动应置于高速级还是低速级?为什么?答:在二级圆柱齿轮传动中,斜齿轮传动放在高速级,直齿轮传动放在低速级。
其原因有三点:1)斜齿轮传动工作平稳,在与直齿轮精度等级相同时允许更高的圆周速度,更适于高速。
2)将工作平稳的传动放在高速级,对下级的影响较小。
如将工作不很平稳的直齿轮传动放在高速级,则斜齿轮传动也不会平稳。
3)斜齿轮传动有轴向力,放在高速级轴向力较小,因为高速级的转矩较小。
由锥齿轮和斜齿轮组成的二级减速器,一般应将锥齿轮传动放在高速级。
其原因是:低速级的转矩较大,齿轮的尺寸和模数较大。
当锥齿轮的锥距R 和模数m 大时,加工困难,制造成本提高。
例11-2 一对齿轮传动,若按无限寿命考虑,如何判断其大小齿轮中哪个不易出现齿面点蚀?哪个不易发生齿根弯曲疲劳折断?答:一对齿轮的接触应力相等,哪个齿轮首先出现点蚀,取决于它们的许用接触应力][H σ,其中较小者容易出现齿面点蚀。
通常,小齿轮的硬度较大,极限应力lim σ较大,按无限寿命设计,小齿轮的许用接触应力][H σ 1 较大,不易出现齿面点蚀。
判断哪个齿轮先发生齿根弯曲疲劳折断,即比较两轮的弯曲疲劳强度,要比较两个齿轮的111][F Sa Fa Y Y σ和222][F Sa Fa YY σ,其比值较小者弯曲强度较高,不易发生轮齿疲劳折断。
、例11-3 图示双级斜齿圆柱齿轮减速器,高速级:m n =2 mm ,z 1=22,z 2 =95,︒=20n α,a =120,齿轮1为右旋;低速级:m n = 3 mm ,z 3 =25,z 4=79,︒=20n α,a =160。
主动轮转速n 1=960 r/min ,转向如图,传递功率P = 4 kW ,不计摩擦损失,试:(1) 标出各轮的转向和齿轮2的螺旋线方向; (2) 合理确定3、4轮的螺旋线方向;(3) 画出齿轮2、3 所受的各个分力; (4) 求出齿轮3所受3个分力的大小。
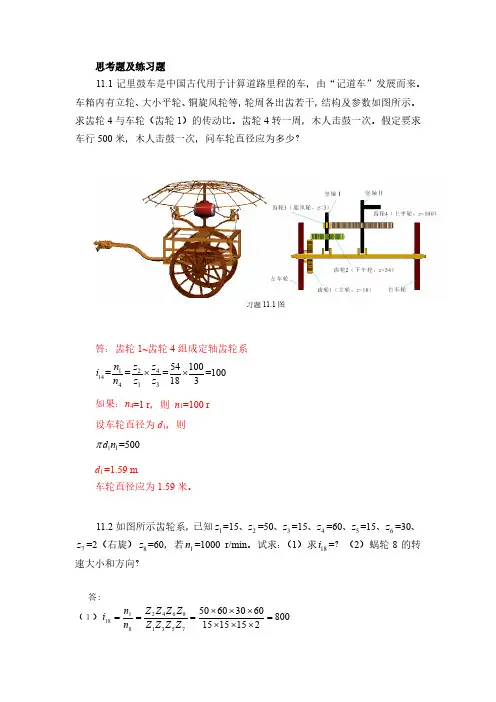
思考题及练习题11.1记里鼓车是中国古代用于计算道路里程的车,由“记道车”发展而来。
车箱内有立轮、大小平轮、铜旋风轮等,轮周各出齿若干,结构及参数如图所示。
求齿轮4与车轮(齿轮1)的传动比。
齿轮4转一周,木人击鼓一次。
假定要求车行500米,木人击鼓一次,问车轮直径应为多少?答:齿轮1~齿轮4组成定轴齿轮系1412441354100====100183i n z z n z z ×× 如果:n 4=1 r ,则 n 1=100 r设车轮直径为d 1,则11=500d n πd 1=1.59 m车轮直径应为1.59米。
11.2如图所示齿轮系,已知1z =15、2z =50、3z =15、4z =60、5z =15、6z =30、7z =2(右旋)8z =60,若1n =1000 r/min 。
试求:(1)求18i =?(2)蜗轮8的转速大小和方向?答:(1)800215151560306050753186428118=××××××===Z Z Z Z Z Z Z Z n n i习题11.1图(2)18181000 1.25r /min 800n n i === 方向用画箭头方法确定,为顺时针方向。
11.3. 如图所示轮系,已知齿轮齿数1z =30、2z =20、3z =30、4z =20、5z =80 、蜗杆头数6z =1、蜗轮齿数7z =60,齿轮1转速n 1=1200 r/min ,方向如图中箭头所示,求齿轮1与蜗轮7的传动比17i ,蜗轮7的转速n 7,并在图中标出其转动方向。
答: 解:235711771246203080602403020201z z z z n i n z z z z ×××====××× 171712005r /min 240n n i === 方向用画箭头方法确定,为逆时针方向。
第11章作业11-1在给定轮系主动轮的转向后,可用什么方法来确定定轴轮系从动轮的转向?周转轮系中主、从动件的转向关系又用什么方法来确定?答:参考教材216~218页。
11-2如何划分一个复合轮系的定轴轮系部分和各基本周转轮系部分?在图示的轮系中,既然构件5作为行星架被划归在周转轮系部分中,在计算周转轮系部分的传动比时,是否应把齿轮5的齿数,Z5计入?答:划分一个复合轮系的定轴轮系部分和各基本周转轮系部分关键是要把其中的周转轮系部分划出来,周转轮糸的特点是具有行星轮和行星架,所以要先找到轮系中的行星轮,然后找出行星架。
每一行星架,连同行星架上的行星轮和与行星轮相啮合的太阳轮就组成一个基本周转轮糸。
在一个复合轮系中可能包括有几个基本周转轮系(一般每一个行星架就对应一个基本周转轮系),当将这些周转轮一一找出之后.剩下的便是定轴轮糸部分了。
在图示的轮系中.虽然构件5作为行星架被划归在周转轮系部分中,但在计算周转轮系部分的传动比时.不应把齿轮5的齿数计入。
11-3在计算行星轮系的传动比时,式i mH=1-i H mn只有在什么情况下才是正确的?答在行星轮系,设固定轮为n, 即ωn=0时, i mH=1-i H mn公式才是正确的。
11-4在计算周转轮系的传动比时,式i H mn=(n m-n H)/(n n-n H)中的i H mn是什么传动比,如何确定其大小和“±”号?答: i H mn是在根据相对运动原理,设给原周转轮系加上一个公共角速度“-ωH”。
使之绕行星架的固定轴线回转,这时各构件之间的相对运动仍将保持不变,而行星架的角速度为0,即行星架“静止不动”了.于是周转轮系转化成了定轴轮系,这个转化轮系的传动比,其大小可以用i H mn=(n m-n H)/(n n-n H)中的i H mn公式计算;方向由“±”号确定,但注意,它由在转化轮系中m. n两轮的转向关系来确定。
11-5用转化轮系法计算行星轮系效率的理论基础是什么?为什么说当行星轮系为高速时,用它来计算行星轮系的效率会带来较大的误差?答: 用转化轮系法计算行星轮系效率的理论基础是行星轮系的转化轮系和原行星轮系的差别,仅在于给整个行星轮系附加了一个公共角速度“-ωH”。
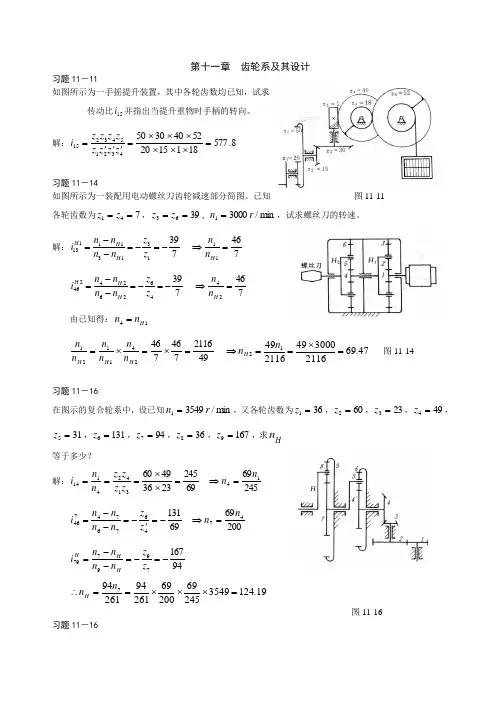
第十一章 齿轮系及其设计习题11-11如图所示为一手摇提升装置,其中各轮齿数均已知,试求传动比15i 并指出当提升重物时手柄的转向。
解:8.5771811520524030504321543215=⨯⨯⨯⨯⨯⨯='''=z z z z z z z z i习题11-14如图所示为一装配用电动螺丝刀齿轮减速部分简图。
已知 图11-11 各轮齿数为741==z z ,3963==z z , m in /30001r n =,试求螺丝刀的转速。
解:739131311113-=-=--=z z n n n n i H H H 74611=⇒H n n 739462624246-=-=--=z z n n n n i H H H 74624=⇒H n n 由已知得:14H n n =492116746746241121=⨯=⨯=H H H n n n n n n 47.69211630004921164912=⨯==⇒n n H 图11-14习题11-16在图示的复合轮系中,设已知m in /35491r n =,又各轮齿数为361=z ,602=z ,233=z ,494=z ,315=z ,1316=z ,947=z ,368=z ,1679=z ,求H n等于多少?解:2456969245233649601431424114n n z z z z n n i =⇒=⨯⨯=== 200696913147467674746n n z z n n n n i =⇒-='-=--= 94167799779-=-=--=z z n n n n i H H H19.1243549245692006926194261947=⨯⨯⨯==∴n n H 图11-16习题11-16图a 、b 所示为两个不同结构的锥齿轮周转轮系,已知201=z ,242=z ,302='z ,403=z ,m in /2001r n =,min /1003r n -=。
第11章齿轮系及其设计11.1复习笔记一、齿轮系及其分类1.定义由一系列的齿轮所组成的齿轮传动系统称为齿轮系,简称轮系。
2.分类根据轮系运转时各个齿轮的轴线相对于机架的位置是否固定,将轮系分为三大类:(1)定轴轮系运转时各个齿轮的轴线相对于机架的位置都是固定的轮系称为定轴轮系。
(2)周转轮系①定义如图11-1-1所示,运转时至少有一个齿轮轴线的位置不固定,而是绕着其他齿轮的固定轴线回转的轮系称为周转轮系。
图11-1-1周转轮系②基本构件在周转轮系中,一般都以太阳轮和行星架作为输入和输出构件,称为周转轮系的基本构件。
a.太阳轮轮系中绕固定轴回转的齿轮称为太阳轮。
如图11-1-1中齿轮l和内齿轮3都围绕着固定轴线OO回转,则齿轮1和内齿轮3为太阳轮;b.行星轮不仅绕自身轴线作自转,还随着行星架一起绕固定轴线做公转的齿轮称为行星轮。
如图11-1-1中齿轮2,其中构件H为行星架,又称转臂或系杆。
③分类a.根据其自由度的数目分类第一,差动轮系自由度为2的周转轮系称为差动轮系;第二,行星轮系自由度为1的周转轮系称为行星轮系。
b.根据基本构件的不同分类若轮系中的太阳轮以K表示,行星架以H表示,则如图11-1-1所示的轮系称为2K-H 型周转轮系。
(3)复合轮系既包含定轴轮系部分,又包含周转轮系部分,或者是由几部分周转轮系组成的轮系称为复合轮系。
二、定轴轮系的传动比1.轮系传动比的定义轮系的传动比是指轮系中首、末两构件的角速度之比。
2.传动比计算(1)定轴轮系的传动比等于组成该轮系的各对啮合齿轮传动比的连乘积;(2)传动比又等于各对啮合齿轮中所有从动轮齿数的连乘积与所有主动轮齿数的连乘积之比,即:定轴轮系的传动比=所有从动轮齿数的连乘积/所有主动轮齿数的连乘积3.首、末轮转向关系的确定(1)转向的确定①齿轮的转向可用箭头表示,箭头方向表示齿轮可见侧的圆周速度的方向;②标志一对啮合传动的齿轮转向的箭头为同时指向节点或同时背离节点;③当首、末两轮的轴线彼此平行时,两轮的转向不是相同就是相反;当两者的转向相同时,规定其传动比为“+”,反之为“-”;④若首、末两轮的轴线不平行,其间的转向关系只能在图上用箭头来表示。
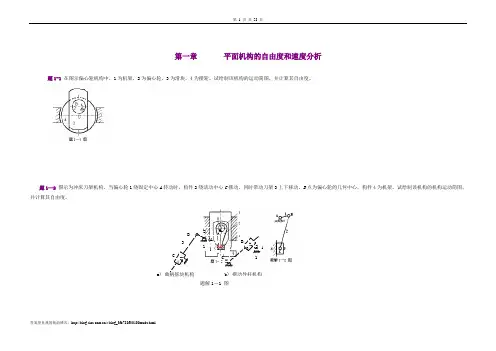
第一章平面机构的自由度和速度分析题1-1在图示偏心轮机构中,1为机架,2为偏心轮,3为滑块,4为摆轮。
试绘制该机构的运动简图,并计算其自由度。
题1—2图示为冲床刀架机构,当偏心轮1绕固定中心A转动时,构件2绕活动中心C摆动,同时带动刀架3上下移动。
B点为偏心轮的几何中心,构件4为机架。
试绘制该机构的机构运动简图,并计算其自由度。
题1—3计算题1-3图a)与图b)所示机构的自由度(若有复合铰链,局部自由度或虚约束应明确指出)。
题1-3图a)题1-3图b)题1—4计算题1—4图a、图b所示机构的自由度(若有复合铰链,局部自由度或虚约束应明确指出),并判断机构的运动是否确定,图中画有箭头的构件为原动件。
题1—5 计算题1—5图所示机构的自由度(若有复合铰链,局部自由度或虚约束应明确指出),并标出原动件。
题1—5图 题解1—5图题1-6 求出图示的各四杆机构在图示位置时的全部瞬心。
第二章 连杆机构题2-1在图示铰链四杆机构中,已知 l BC =100mm ,l CD =70mm ,l AD =60mm ,AD 为机架。
试问:(1)若此机构为曲柄摇杆机构,且AB 为曲柄,求l AB 的最大值;(2)若此机构为双曲柄机构,求l AB 最小值; (3)若此机构为双摇杆机构,求l AB 的取值范围。
题2-2 如图所示的曲柄滑块机构: (1)曲柄为主动件,滑块朝右运动为工作 行程,试确定曲柄的合理转向,并简述其理由;(2)当曲柄为主动件时,画出极位夹角θ,最小传动角g min ; (3)设滑块为主动件,试用作图法确定该机构的死点位置 。
D题2-1图题2-3图示为偏置曲柄滑块机构,当以曲柄为原动件时,在图中标出传动角的位置,并给出机构传动角的表达式,分析机构的各参数对最小传动角的影响。
题2-4设计一曲柄摇杆机构,已知机构的摇杆DC长度为150mm,摇杆的两极限位置的夹角为45°,行程速比系数K=1.5,机架长度取90mm。
机械设计基础课后习题答案第三版课后答案(1-18章全) 完整版机械设计基础课后习题答案第三版高等教育出版社目录第1章机械设计概述1第2章摩擦、磨损及润滑概述 3第3章平面机构的结构分析12第4章平面连杆机构16第5章凸轮机构 36第6章间歇运动机构46第7章螺纹连接与螺旋传动48第8章带传动60第9章链传动73第10章齿轮传动80第11章蜗杆传动112第12章齿轮系124第13章机械传动设计131第14章轴和轴毂连接133第15章轴承138第16章其他常用零、部件152第17章机械的平衡与调速156第18章机械设计CAD简介163机械设计概述机械设计过程通常分为哪几个阶段?各阶段的主要内容是什么?答:机械设计过程通常可分为以下几个阶段:1.产品规划主要工作是提出设计任务和明确设计要求。
2.方案设计在满足设计任务书中设计具体要求的前提下,由设计人员构思出多种可行方案并进行分析比较,从中优选出一种功能满足要求、工作性能可靠、结构设计可靠、结构设计可行、成本低廉的方案。
3.技术设计完成总体设计、部件设计、零件设计等。
4.制造及试验制造出样机、试用、修改、鉴定。
常见的失效形式有哪几种?答:断裂,过量变形,表面失效,破坏正常工作条件引起的失效等几种。
什么叫工作能力?计算准则是如何得出的?答:工作能力为指零件在一定的工作条件下抵抗可能出现的失效的能力。
对于载荷而言称为承载能力。
根据不同的失效原因建立起来的工作能力判定条件。
标准化的重要意义是什么?答:标准化的重要意义可使零件、部件的种类减少,简化生产管理过程,降低成本,保证产品的质量,缩短生产周期。
第2章摩擦、磨损及润滑概述按摩擦副表面间的润滑状态,摩擦可分为哪几类?各有何特点?答:摩擦副可分为四类:干摩擦、液体摩擦、边界摩擦和混合摩擦。
干摩擦的特点是两物体间无任何润滑剂和保护膜,摩擦系数及摩擦阻力最大,磨损最严重,在接触区内出现了粘着和梨刨现象。
液体摩擦的特点是两摩擦表面不直接接触,被液体油膜完全隔开,摩擦系数极小,摩擦是在液体的分子间进行的,称为液体润滑。
第11章课后习题答案11-1 解1)由公式可知:轮齿的工作应力不变,则则,若,该齿轮传动能传递的功率11-2解由公式可知,由抗疲劳点蚀允许的最大扭矩有关系:设提高后的转矩和许用应力分别为、当转速不变时,转矩和功率可提高69%。
11-3解软齿面闭式齿轮传动应分别验算其接触强度和弯曲强度。
(1)许用应力查教材表11-1小齿轮45钢调质硬度:210~230HBS取220HBS;大齿轮ZG270-500正火硬度:140~170HBS,取155HBS。
查教材图11-7,查教材图11-10 ,查教材表11-4取,故:(2)验算接触强度,验算公式为:其中:小齿轮转矩载荷系数查教材表11-3得齿宽中心距齿数比则:、,能满足接触强度。
(3)验算弯曲强度,验算公式:其中:齿形系数:查教材图11-9得、则:满足弯曲强度。
11-4解开式齿轮传动的主要失效形式是磨损,目前的设计方法是按弯曲强度设计,并将许用应力降低以弥补磨损对齿轮的影响。
(1)许用弯曲应力查教材表11-1小齿轮45钢调质硬度:210~230HBS取220HBS;大齿轮45钢正火硬度:170~210HBS,取190HBS。
查教材图11-10得,查教材表11-4 ,并将许用应用降低30%故(2)其弯曲强度设计公式:其中:小齿轮转矩载荷系数查教材表11-3得取齿宽系数齿数,取齿数比齿形系数查教材图11-9得、因故将代入设计公式因此取模数中心距齿宽11-5解硬齿面闭式齿轮传动的主要失效形式是折断,设计方法是按弯曲强度设计,并验算其齿面接触强度。
(1)许用弯曲应力查教材表11-1,大小齿轮材料40Cr 表面淬火硬度:52~56HRC,取54HRC。
查教材图11-10得,查材料图11-7得。
查教材表11-4 ,因齿轮传动是双向工作,弯曲应力为对称循环,应将极限值乘70%。
故(2)按弯曲强度设计,设计公式:其中:小齿轮转矩载荷系数查教材表11-3得取齿宽系数齿数,取齿数比齿形系数应将齿形系数较大值代入公式,而齿形系数值与齿数成反比,将小齿轮的齿形系数代入设计公式,查教材图11-9得因此取模数(3)验算接触强度,验算公式:其中:中心距齿宽,取满足接触强度。
习题与参考答案一、单项选择题(从给出的A、B、C、D中选一个答案)1 一般开式齿轮传动的主要失效形式是。
A. 齿面胶合B. 齿面疲劳点蚀C. 齿面磨损或轮齿疲劳折断D. 轮齿塑性变形2 高速重载齿轮传动,当润滑不良时,最可能出现的失效形式是。
A. 齿面胶合B. 齿面疲劳点蚀C. 齿面磨损D. 轮齿疲劳折断3 45钢齿轮,经调质处理后其硬度值约为。
A. 45~50 HRCB. 220~270 HBSC. 160~180 HBSD. 320~350 HBS4 齿面硬度为56~62HRC的合金钢齿轮的加工工艺过程为。
A. 齿坯加工→淬火→磨齿→滚齿B. 齿坯加工→淬火→滚齿→磨齿C. 齿坯加工→滚齿→渗碳淬火→磨齿D. 齿坯加工→滚齿→磨齿→淬火5 齿轮采用渗碳淬火的热处理方法,则齿轮材料只可能是。
A. 45钢B. ZG340-640C. 20CrD. 20CrMnTi6 齿轮传动中齿面的非扩展性点蚀一般出现在。
A. 跑合阶段B. 稳定性磨损阶段C. 剧烈磨损阶段D. 齿面磨料磨损阶段7 对于开式齿轮传动,在工程设计中,一般。
A. 按接触强度设计齿轮尺寸,再校核弯曲强度B. 按弯曲强度设计齿轮尺寸,再校核接触强度C. 只需按接触强度设计D. 只需按弯曲强度设计8 一对标准直齿圆柱齿轮,若z1=18,z2=72,则这对齿轮的弯曲应力。
A. σF1>σF2B. σF1<σF2C. σF1=σF2D. σF1≤σF29 对于齿面硬度≤350HBS的闭式钢制齿轮传动,其主要失效形式为。
A. 轮齿疲劳折断B. 齿面磨损C. 齿面疲劳点蚀D. 齿面胶合10 一减速齿轮传动,小齿轮1选用45钢调质;大齿轮选用45钢正火,它们的齿面接触应力。
A. σH1>σH2B. σH1<σH2C. σH1=σH2D. σH1≤σH211 对于硬度≤350HBS的闭式齿轮传动,设计时一般。
A. 先按接触强度计算B. 先按弯曲强度计算C. 先按磨损条件计算D. 先按胶合条件计算12 设计一对减速软齿面齿轮传动时,从等强度要求出发,大、小齿轮的硬度选择时,应使。