机械原理-机械的平衡
- 格式:doc
- 大小:2.57 MB
- 文档页数:14

第9章1、研究机械平衡的目的是部分或完全消除构件在运动时所产生的,减少或消除在机构各运动副中所引起的力,减轻有害的机械振动,改善机械工作性能和延长使用寿命。
答案:惯性力和惯性力偶矩附加动压2、回转构件的直径D和轴向宽度b之比D b符合条件或有重要作用的回转构件,必须满足动平衡条件方能平稳地运转。
如不平衡,必须至少在个校正平面上各自适当地加上或去除平衡质量,方能获得平衡。
答案:小于等于5 二个3、只使刚性转子的得到平衡称静平衡,此时只需在平衡平面中增减平衡质量;使同时达到平衡称动平衡,此时至少要在个选定的平衡平面中增减平衡质量,方能解决转子的不平衡问题。
答案:惯性力,一个惯性力和惯性力偶矩,二个4、刚性转子静平衡的力学条件是,而动平衡的力学条件是。
答案:质径积的向量和等于零质径积向量和等于零,离心力引起的合力矩等于零,转子a是不平衡的,转子b是5、图示两个转子,已知m r m r1122不平衡的。
a)b)答案:静动6、符合静平衡条件的回转构件,其质心位置在。
静不平衡的回转构件,由于重力矩的作用,必定在位置静止,由此可确定应加上或去除平衡质量的方向。
答案:回转轴线上质心在最低处7、回转构件的直径D和轴向宽度b之比D b符合条件的回转构件,只需满足静平衡条件就能平稳地回转。
如不平衡,可在个校正平面上适当地加上或去除平衡质量就能获得平衡。
答案:大于等于5 一个8、图a、b、c中,S为总质心,图中的转子具有静不平衡,图中的转子是动不平衡。
答案:a和b c9、当回转构件的转速较低,不超过范围,回转构件可以看作刚性物体,这类平衡称为刚性回转件的平衡。
随着转速上升并超越上述范围,回转构件出现明显变形,这类回转件的平衡问题称为回转件的平衡。
答案:(0.6~0.7)第一阶临界转速挠性10、机构总惯性力在机架上平衡的条件是。
答案:机构的总质心位置静止不动===,并作轴向等间隔布置,11、在图示a、b、c三根曲轴中,已知m r m r m r m r11223344且都在曲轴的同一含轴平面内,则其中轴已达静平衡,轴已达动平衡。
第六章机械的平衡机械平衡的目的是尽可能地消除或减小惯性力对机械的不良影响。
为达到此目的,通常需要做两方面的工作:首先,在机械的设计阶段,对所设计的机械在满足其工作要求的前提下,应在结构上保证其不平衡惯性力最小或为零,即进行平衡设计;其次,经过平衡设计后的机械,由于材质不均、加工及装配误差等因素的影响,生产出来的机械往往达不到设计要求,还会有不平衡现象,此时需要用试验的方法加以平衡,即进行平衡试验。
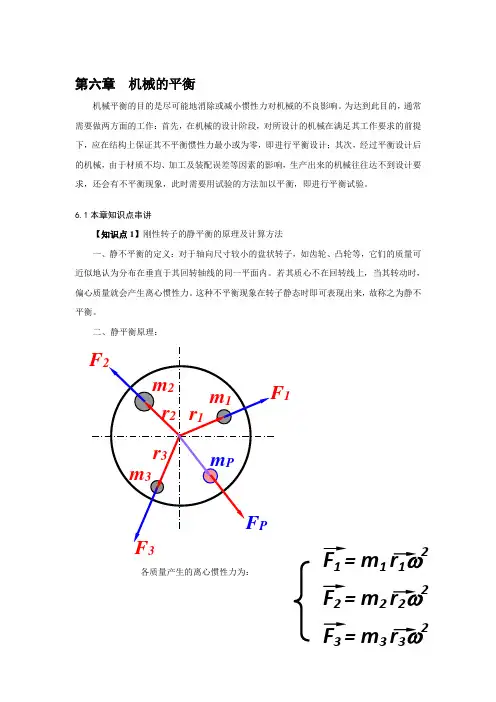
6.1本章知识点串讲【知识点1】刚性转子的静平衡的原理及计算方法一、静不平衡的定义:对于轴向尺寸较小的盘状转子,如齿轮、凸轮等,它们的质量可近似地认为分布在垂直于其回转轴线的同一平面内。
若其质心不在回转线上,当其转动时,偏心质量就会产生离心惯性力。
这种不平衡现象在转子静态时即可表现出来,故称之为静不平衡。
二、静平衡原理:各质量产生的离心惯性力为:13F1 = m1 r1ω2F2 = m2 r2ω2F3 = m3 r3ω2若:F 1+F 2 +F3 ≠ 0——表明此回转体为非平衡回转体。
人为增加一个质量点m P ,该质量点产生一个离心惯性力F P ,F 1+F 2 +F3+F P = 0称对此回转体进行了平衡。
结论:若欲使回转体处于平衡,则各质量点的质径积(或重径积)的矢量和为零。
三、求解方法主要有矢量图解法和坐标轴投影法。
A.矢量图解法其中W i = m i r i ,称为质径积。
用矢量图解法进行求解时,一定要选取合适的比例尺,作图要尽量准确。
平衡条件为:m 1 r 1 + m 2 r 2 + m 3 r 3 + m P r P =0 B.坐标轴投影法【知识点2】刚性转子的动平衡的原理及计算方法一、动不平衡的定义:对于轴向尺寸较大的转子,如内燃机曲轴和机床主轴等,其偏心质量分布在不同的回转平面内。
在这种情况下,即使转子的质心在回转轴线上,由于各偏心质量所产生的离心惯性力不在同一回转平面内,因而将形成惯性力偶,所以仍然是不平衡的。
第四讲 机械的平衡一、刚性转子的静平衡计算(1)静不平衡转子: 对于轴向尺寸较小的盘状转子(即轴向宽度b 与其直径D 之比b /D < 0.2的转子),其质量可以近似认为分布在垂直于其回转轴线的同一平面内。
若其质心不在回转轴线上,则当其转动时,其偏心质量就会产生惯性力。
由于这种不平衡现象在转子静态时即可表现出来,故称其为静不平衡转子(2)静平衡及其条件: 对于静不平衡的转子进行静平衡时,可利用在转子上增加或除去一部分质量的方法,使其质心与回转轴心重合,即可使转子的惯性力得以平衡,称为静平衡。
静平衡的力学条件:其惯性力的矢量和应等于零或质径积的矢量和应等于零。
静平衡条件表达:形式一: 力条件:=+=∑∑b IiF F F形式二:质径积条件:=+∑b b ii r m rm(3)静平衡的计算: 即根据转子的结构,计算确定需在转子上增加或除去的平衡质量,使其设计成平衡的。
对于静不平衡的转子,无论有多少个偏心质量,只需进行单面平衡。
例1 图示盘形回转件上存在三个偏置质量,已知m 110= kg ,m 215= kg ,m 310= kg ,r 150= mm ,r 2100= mm ,r 370= mm ,设所有不平衡质量分布在同一回转平面内,问应在什么方位上加多大的平衡质径积才能达到平衡?解:111050500 kg mm m r =⨯=⋅ 22151001500 kg mm m r =⨯=⋅ 331070700 kg mm m r =⨯=⋅1r 与3r 共线,可代数相加得 3311700500200 kg mm m r m r -=-=⋅ 方向同3r r平衡条件:b b 1122330m r m r m r m r +++=r r r r所以依次作矢量()331122,m r m r m r +r r r ,封闭矢量b b m r r即所求,如图示。
22b b 20015001513.275 kg mm m r =+=⋅0200270arctg277.5951500θ=+=︒b b例1图解例 2 图示盘状转子上有两个不平衡质量:m 115=.kg ,m 208=.kg ,r 1140= mm ,r 2180= mm ,相位如图。
现用去重法来平衡,求所需挖去的质量的大小和相位(设挖去质量处的半径r =140mm )。
解:不平衡质径积 11210 kg mm m r =⋅22144 kg mm m r =⋅静平衡条件1122b b 0m r m r m r ++=r r r解得b b 140 kg mm m r =⋅ 例14-2图应加平衡质量b 140/140 1 kg m ==挖去的质量应在b b m r r矢量的反方向,140mm 处挖去1kg 质量。
例2图解二、刚性转子的动平衡计算(1)动不平衡转子 :对于轴向尺寸较大的转子(即b /D ≥0.2的转子),其质量不可以近似认为分布在垂直于其回转轴线的同一平面内,而往往是分布在若干个不同的回转平面内。
这种不平衡现象只有在转子运转的情况下才能显示出来,故称其为动不平衡转子。
(2)动平衡及其条件 对于动不平衡的转子,为使转子在运转时其各偏心质量产生的惯性力和惯性力偶矩同时得以平衡。
需在选择两个平衡基面,并适当地各加一平衡质量,使两平衡基面内的惯性力之和分别为零,这个转子便可得以动平衡。
动平衡的力学条件:各偏心质量(包括平衡质量)的惯性力的矢量和为零,以及由这些惯性力所构成的力矩的矢量和也为零。
,即∑F= 0 ∑M = 0 (3)动平衡步骤:①先计算出各平面的惯性力:1I F ,2I F 及3I F 。
②由理论力学可知,一个力可以分解为与其相平行的两个分力。
先选定两个回转平面Ⅰ和Ⅱ——平衡基面(将来即在这两个面上增加或减去平衡质量)。
其次,将各离心惯性力分解到平面Ⅰ和Ⅱ上。
由于:L l F F I 1⋅=,L l L F F 1-⋅=I I ∴L l F F I I I 111⋅= L l L F F I I 111-⋅=I IL l F F I I I 222⋅= L l L F F I I 222-⋅=I I L l F F I I I 333⋅= L l L F F I I 333-⋅=I I③根据静平衡原理,分别在平衡基面Ⅰ及Ⅱ内作平衡求解。
以平衡基面Ⅰ为例:则在该平衡基面内,各偏心质量(含平衡质量)产生的惯性力的矢量和为零,0=∑IF。
注:动平衡的构件一定是静平衡,静平衡的转子不一定是动平衡。
例3 高速水泵的凸轮轴系由三个互相错开120︒的偏心轮组成,每一偏心轮的质量为m ,其偏心距为r ,设在平衡平面A 和B 上各装一个平衡质量m A 和m B ,其回转半径为2r ,其他尺寸如图示。
试求m A 和m B 的大小和方向(可用图解法)。
解:偏心轮的不平衡质径积C CD DE E m r m r m r mr ===分别分解到平衡平面A 和B()5/4250/200mr mr r m A C C ==()5/250/50mr mr r m B C C ==()2/250/125mr mr r m A D D ==()2/250/125mr mr r m B D D ==()5/250/50mr mr r m A E E ==()5/4250/200mr mr r m BE E ==动平衡条件()()()()0b b =+++A E E A D D A C C A r m r m r m r m ρρρρ ()()()()0b b =+++BE E B D D B C C B r m r m r m r m ρρρρ解得:()2/b b mr r m A =因为 b 2r r =,所以()m m m A A 25.0b ==,()2/b b mr r m B=因为r r b =2,所以()m m m B B 25.0b ==方向如图示。
例3图解例4 一回转体上有三质量:1 3 kg m =,2 1 kg m =,3 4 kg m =,绕z 轴等角速度旋转,160 mm r =,2140 mm r =,390 mm r =,其余尺寸如图示,试用图解法求应在平面Ⅰ和Ⅱ处各加多大平衡质量才能得到动平衡(设平衡质量bI m 和bII m 离转动轴线的距离bI r 、bII r 为bI bII 100 mm r r ==)。
例14-4图解:偏心质径积11m r ,22m r ,33m r 分别向Ⅰ,Ⅱ两平衡平面内分解。
11130360146.25 kg mm160m r ''=⨯⨯=⋅113036033.75 kg mm 160m r ''''=⨯⨯=⋅221601140140 kg mm 160m r ''=⨯⨯=⋅220m r ''''=334049090 kg mm160m r ''=⨯⨯︒=⋅33120490270 kg mm160m r ''''=⨯⨯=⋅分别在Ⅰ,Ⅱ两平衡平面内进行静平衡。
kg mm10mm mr μ⋅=n n bI bI b b 65 kg mmm r m r ==⋅""bII bII b b 240 kg mm m r m r ==⋅bI 0.65 kgm =bII 2.4 kgm = 方向如图。
解:①转速ω=2πn/60=31.4m1所产生的离心惯性力为R1=m1ω2r1=473.26Nm2所产生的离心惯性力为R2=m2ω2r2=492.98Nm3所产生的离心惯性力为R3=m3ω2r3=394.38N各惯性力在X轴和Y轴上的分力分别为:R1X= R1cos90。
=0N;R1Y= R1sin90。
=473.26NR2X= R2cos195。
=-476.18N;R2Y= R2sin195。
=-127.59NR3X= R3cos(-45。
)=278.87N;R3Y= R3sin(-45。
)=-278.87NR X= R1X + R2X + R3X =-197.31N;R Y= R1Y + R2Y + R3Y=66.83NR= (R X 2+ R Y 2)1/2=208.32N所以离心惯性力的合力与X轴的夹角为α=arccos(-197.31/208.32)=161.29。
在A和B处所产生的动压力分别为:R A=R(b/(a+b))=78.12N;R B=R(a/(a+b))=130.2N,方向均与X轴成的夹角161.29。
②各质径积分别为:m1r1=480kgmm;m2r2=500kgmm;m3r3=400kgmm各质径积在X轴和Y轴上的投影分别为:(m1r1)X=0,(m1r1)Y=480kgmm;(m2r2)X=500×cos195。
=-482.96 kgmm,(m2r2)Y=500×sin195。
=-129.41 kgmm;(m3r3)X=400×cos(-45。
)=282.84 kgmm,(m3r3)Y=400×sin (-45。
)=-282.84 kgmm (mr) X=(m1r1)X +(m2r2)X +(m3r3)X =-200.12 kgmm,(mr) Y=(m1r1)Y +(m2r2)Y +(m3r3)Y =67.75 kgmm总质径积为mr =((mr) X2+(mr) Y2)1/2=211.28 kgmm,方向为与X轴的夹角为arccos((mr) X/mr)= 161.29。
m b=mr/r b=1.0564kg,方向与mr的方向相反,即与X轴成-18.71。
③对于动平衡,要对其惯性力偶进行平衡,所以要两个平衡基面,而静平衡不需对力偶进行平衡,所以需一个平衡基面。
静平衡的物体不一定动平衡。