机械原理课后答案——第十章 机械的平衡
- 格式:ppt
- 大小:215.00 KB
- 文档页数:26
机械原理第八版第十章答案【篇一:机械原理第八版答案与解析】1、如图a所示为一简易冲床的初拟设计方案,设计者的思路是:动力由齿轮1输入,使轴a连续回转;而固装在轴a上的凸轮2与杠杆3组成的凸轮机构将使冲头4上下运动以达到冲压的目的。
试绘出其机构运动简图(各尺寸由图上量取),分析其是否能实现设计意图?并提出修改方案。
解 1)取比例尺?l绘制其机构运动简图(图b)。
2)分析其是否能实现设计意图。
图 a)由图b可知,n?3,pl?4,ph?1,p??0,f??0 故:f?3n?(2pl?ph?p?)?f??3?3?(2?4?1?0)?0?0因此,此简单冲床根本不能运动(即由构件3、4与机架5和运动副b、c、d组成不能运动的刚性桁架),故需要增加机构的自由度。
图 b)3)提出修改方案(图c)。
为了使此机构能运动,应增加机构的自由度(其方法是:可以在机构的适当位置增加一个活动构件和一个低副,或者用一个高副去代替一个低副,其修改方案很多,图c给出了其中两种方案)。
图 c1)图 c2)2、试画出图示平面机构的运动简图,并计算其自由度。
图a)解:n?3,pl?4,ph?0,f?3n?2pl?ph?1图 b)解:n?4,pl?5,ph?1,f?3n?2pl?ph?13、计算图示平面机构的自由度。
将其中的高副化为低副。
机构中的原动件用圆弧箭头表示。
3-1解3-1:n?7,pl?10,ph?0,f?3n?2pl?ph?1,c、e复合铰链。
3-2解3-2:n?8,pl?11,ph?1,f?3n?2pl?ph?1,局部自由度3-3 解3-3:n?9,pl?12,ph?2,f?3n?2pl?ph?14、试计算图示精压机的自由度解:n?10,pl?15,ph?0解:n?11,pl?17,ph?0p??2pl??p?h?3n??2?5?0?3?3?1p??2pl??p?h?3n??2?10?3?6?2f??0f??0f?3n?(2pl?ph?p?)?f?f?3n?(2pl?ph?p?)?f??3?10?(2?15?0?1)?0?1 ?3?11?(2?17?0?2)?0?1(其中e、d及h均为复合铰链)(其中c、f、k均为复合铰链)5、图示为一内燃机的机构简图,试计算其自由度,并分析组成此机构的基本杆组。
习题解答第一章绪论1-1 答:1 )机构是实现传递机械运动和动力的构件组合体。
如齿轮机构、连杆机构、凸轮机构、螺旋机构等。
2 )机器是在组成它的实物间进行确定的相对运动时,完成能量转换或做功的多件实物的组合体。
如电动机、内燃机、起重机、汽车等。
3 )机械是机器和机构的总称。
4 )a. 同一台机器可由一个或多个机构组成。
b. 同一个机构可以派生出多种性能、用途、外型完全不同的机器。
c. 机构可以独立存在并加以应用。
1-2 答:机构和机器,二者都是人为的实物组合体,各实物之间都具有确定的相对运动。
但后者可以实现能量的转换而前者不具备此作用。
1-3 答:1 )机构的分析:包括结构分析、运动分析、动力学分析。
2 )机构的综合:包括常用机构设计、传动系统设计。
1-4 略习题解答第二章平面机构的机构分析2-1 ~2-5 (答案略)2-6(a) 自由度F=1 (b) 自由度F=1(c) 自由度F=12-7题2 -7 图F =3 × 7 -2 × 9 -2 =12 -8a) n =7 =10 =0 F =3×7-2×10 =1b) B 局部自由度n =3 =3 =2 F=3×3 -2×3-2=1c) B 、D 局部自由度n =3 =3 =2 F=3×3 -2×3-2 =1d) D( 或C) 处为虚约束n =3 =4 F=3×3 -2×4=1e) n =5 =7 F=3×5-2×7=1f) A 、B 、C 、E 复合铰链n =7 =10 F =3×7-2×10 =1g) A 处为复合铰链n =10 =14 F =3×10 -2×14=2h) B 局部自由度n =8 =11 =1 F =3×8-2×11-1 =1i) B 、J 虚约束C 处局部自由度n =6 =8 =1 F =3×6 -2×8-1=1j) BB' 处虚约束A 、C 、D 复合铰链n =7 =10 F =3×7-2×10=1 k) C 、D 处复合铰链n=5 =6 =2F =3×5-2×6-2 =1l) n =8 =11 F =3×8-2×11 =2m) B 局部自由度I 虚约束4 杆和DG 虚约束n =6 =8 =1 F =3×6-2×8-1 =12-9a) n =3 =4 =1 F =3 × 3 -2 × 8 -1 =0 不能动。
机械原理作业(部分答案)第一章结构分析作业1.2 解:(a)F = 3n-2P L-P H = 3×4-2×5-1= 1 A点为复合铰链。
(b)F = 3n-2P L-P H = 3×5-2×6-2= 1B、E两点为局部自由度, F、C两点各有一处为虚约束。
(c)F = 3n-2P L-P H = 3×5-2×7-0= 1 FIJKLM为虚约束。
1.3 解:第二章运动分析作业2.1 解:机构的瞬心如图所示。
2.2 解:取mmmm l /5=μ作机构位置图如下图所示。
1.求D 点的速度V D13P D V V =而 25241314==P P AE V V E D ,所以 s mm V V E D /14425241502524=⨯==2. 求ω1s rad l V AE E /25.11201501===ω3. 求ω2因 98382412141212==P P P P ωω ,所以s rad /46.0983825.1983812=⨯==ωω 4. 求C 点的速度V Csmm C P V l C /2.10154446.0242=⨯⨯=⨯⨯=μω2.3 解:取mmmm l /1=μ作机构位置图如下图a 所示。
1. 求B 2点的速度V B2V B2 =ω1×L AB =10×30= 300 mm/s 2.求B 3点的速度V B3V B3 = V B2 + V B3B2大小 ? ω1×L AB ? 方向 ⊥BC ⊥AB ∥BC 取mm s mm v /10=μ作速度多边形如下图b 所示,由图量得:mmpb 223= ,所以smm pb V v B /270102733=⨯=⨯=μ由图a 量得:BC=123 mm , 则mmBC l l BC 1231123=⨯=⨯=μ3. 求D 点和E 点的速度V D 、V E利用速度影像在速度多边形,过p 点作⊥CE ,过b 3点作⊥BE ,得到e 点;过e 点作⊥pb 3,得到d 点 , 由图量得:mmpd 15=,mmpe 17=,所以smm pd V v D /1501015=⨯=⨯=μ , smm pe V v E /1701017=⨯=⨯=μ;smm b b V v B B /17010173223=⨯=⨯=μ4. 求ω3s rad l V BC B /2.212327033===ω5. 求n B a 222212/30003010smm l a AB n B =⨯=⨯=ω6. 求3B aa B3 = a B3n + a B3t = a B2 + a B3B2k + a B3B2τ 大小 ω32L BC ? ω12L AB 2ω3V B3B2 ?方向 B →C ⊥BC B →A ⊥BC ∥BC 22233/5951232.2s mm l a BCn B =⨯=⨯=ω223323/11882702.222s mm V a B B k B B =⨯⨯=⨯=ω取mms mm a 2/50=μ作速度多边形如上图c 所示,由图量得:mmb 23'3=π ,mmb n 20'33=,所以233/11505023's mm b a a B =⨯=⨯=μπ2333/10005020's mm b n a at B =⨯=⨯=μ7. 求3α233/13.81231000s rad l a BC tB ===α8. 求D 点和E 点的加速度a D 、a E利用加速度影像在加速度多边形,作e b 3'π∆∽CBE ∆, 即 BE eb CE e CB b 33''==ππ,得到e 点;过e 点作⊥3'b π,得到d 点 , 由图量得:mm e 16=π,mmd 13=π,所以2/6505013s mm d a a D =⨯=⨯=μπ ,2/8005016s mm e a a E =⨯=⨯=μπ 。
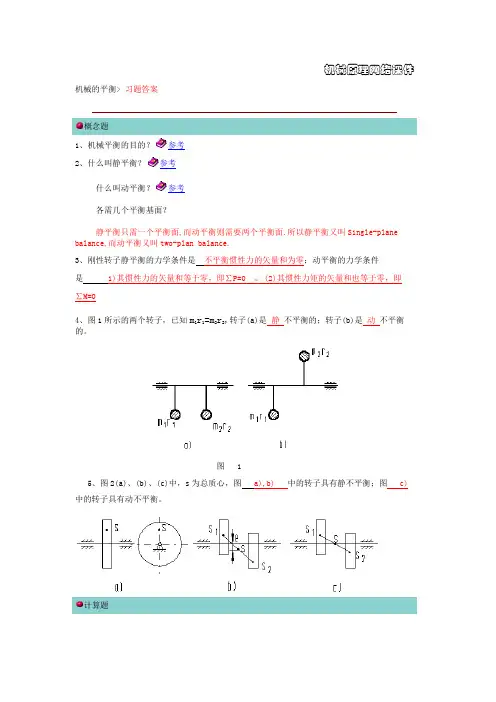
机械原理网络课件机械的平衡>习题答案概念题1、机械平衡的目的?参考2、什么叫静平衡?参考什么叫动平衡?参考各需几个平衡基面?静平衡只需一个平衡面,而动平衡则需要两个平衡面.所以静平衡又叫Single-plane balance,而动平衡又叫two-plan balance.3、刚性转子静平衡的力学条件是不平衡惯性力的矢量和为零;动平衡的力学条件是1)其惯性力的矢量和等于零,即∑P=0。
(2)其惯性力矩的矢量和也等于零,即∑M=04、图1所示的两个转子,已知m1r1=m2r2,转子(a)是静不平衡的;转子(b)是动不平衡的。
图 15、图2(a)、(b)、(c)中,s为总质心,图a),b) 中的转子具有静不平衡;图 c) 中的转子具有动不平衡。
计算题1、如图所示曲轴上,四个曲拐位于同一平面内,若质径积m1r1=m2r2=m3r3=m4r4,l1=l2=l3,试判断该曲轴是否符合动平衡条件?为什么?该曲轴符合动平衡条件2、高速水泵的凸轮轴系由三个互相错开120º的偏心轮组成,每一偏心轮的质量为m,其偏心距为r,设在平衡平面A和B上个装一个平衡质量m A和m B,其回转半径为2r,其他尺寸如图所示。
试求m A和m B的大小和方位(可用图解法)。
题 23、如图所示为一钢质圆盘。
盘厚δ=20mm,在向径r1=100mm处有一直径d=50mm的通孔,向径r2=200mm处有一重量为2N的重块,为使圆盘满足静平衡条件,拟在向径r=200的圆周上再钻一通孔,试求次通孔的直径和方位(钢的重度γ=7.6×10-5N/mm3)。
题 34.A system of two coplanar(同一平面) arms on a common shaft, as shown in the right figure is to be designed. For the row(s) assigned in Table 1, find the shaking force of the linkage when run unbalanced at 10rad/sec and design a counterweight to statically balance the system.a mb r b =0.934 θb =-75.5ºc m b r b =5.932θb =152.3ºem b r b =7.448 θb =-80.76º5.A wheel and tire assembly has been run at 100 rpm on a dynamic balancing machine as shown in the following figure. The force measured at the left bearing had a peak of 5 lb at a phase angle of 45º with respect to the zero reference angle on the tire. The force measured at the right bearing had a peak of 2 lb at a phase angle of -120º with respect to thereference zero on the tire. The center distance between the two bearings on the machine is 10 in. The wheel is 7 in wide at the rim.Calculate the size and location with respect to the tire's zero reference angle, of balance weights needed on each side of the rim to dynamically balance the assembly(The whell rim diameter is 15 in).Answer:Wa=3.56lb θ=44.44ºa=-129.4ºWb=2.13lb θb。

机械原理课后全部习题解答文档编制序号:[KKIDT-LLE0828-LLETD298-POI08]《机械原理》习题解答机械工程学院目录第1章绪论 (1)第2章平面机构的结构分析 (3)第3章平面连杆机构 (8)第4章凸轮机构及其设计 (15)第5章齿轮机构 (19)第6章轮系及其设计 (26)第8章机械运动力学方程 (32)第9章平面机构的平衡 (39)第一章绪论一、补充题1、复习思考题1)、机器应具有什么特征机器通常由哪三部分组成各部分的功能是什么2)、机器与机构有什么异同点3)、什么叫构件什么叫零件什么叫通用零件和专用零件试各举二个实例。
4)、设计机器时应满足哪些基本要求试选取一台机器,分析设计时应满足的基本要求。
2、填空题1)、机器或机构,都是由组合而成的。
2)、机器或机构的之间,具有确定的相对运动。
3)、机器可以用来人的劳动,完成有用的。
4)、组成机构、并且相互间能作的物体,叫做构件。
5)、从运动的角度看,机构的主要功用在于运动或运动的形式。
6)、构件是机器的单元。
零件是机器的单元。
7)、机器的工作部分须完成机器的动作,且处于整个传动的。
8)、机器的传动部分是把原动部分的运动和功率传递给工作部分的。
9)、构件之间具有的相对运动,并能完成的机械功或实现能量转换的的组合,叫机器。
3、判断题1)、构件都是可动的。
()2)、机器的传动部分都是机构。
()3)、互相之间能作相对运动的物件是构件。
()4)、只从运动方面讲,机构是具有确定相对运动构件的组合。
()5)、机构的作用,只是传递或转换运动的形式。
()6)、机器是构件之间具有确定的相对运动,并能完成有用的机械功或实现能量转换的构件的组合。
()7)、机构中的主动件和被动件,都是构件。
()2 填空题答案1)、构件 2)、构件 3)、代替机械功 4)、相对运动 5)、传递转换6)、运动制造 7)、预定终端 8)、中间环节 9)、确定有用构件3判断题答案1)、√ 2)、√ 3)、√ 4)、√ 5)、× 6)、√ 7)、√第二章 机构的结构分析2-7 是试指出图2-26中直接接触的构件所构成的运动副的名称。
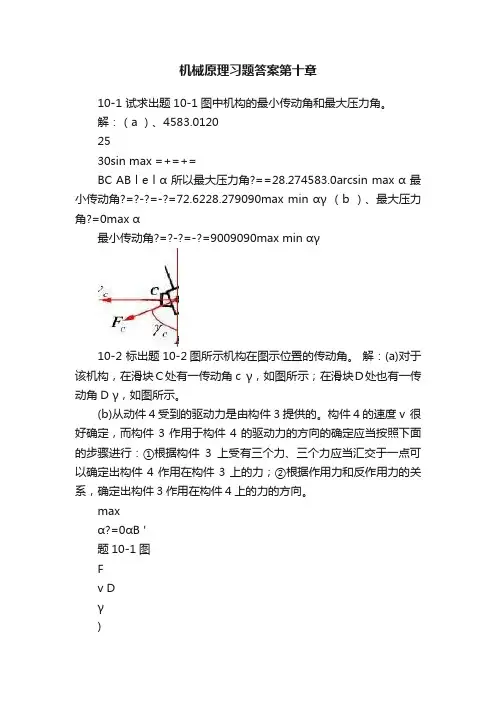
机械原理习题答案第十章10-1 试求出题10-1图中机构的最小传动角和最大压力角。
解:(a )、4583.01202530sin max =+=+=BC AB l e l α 所以最大压力角?==28.274583.0arcsin max α 最小传动角?=?-?=-?=72.6228.279090max min αγ (b )、最大压力角?=0max α最小传动角?=?-?=-?=9009090max min αγ10-2 标出题10-2图所示机构在图示位置的传动角。
解:(a)对于该机构,在滑块C处有一传动角c γ,如图所示;在滑块D处也有一传动角D γ,如图所示。
(b)从动件4受到的驱动力是由构件3提供的。
构件4的速度v 很好确定,而构件3作用于构件4的驱动力的方向的确定应当按照下面的步骤进行:①根据构件3上受有三个力、三个力应当汇交于一点可以确定出构件4作用在构件3上的力;②根据作用力和反作用力的关系,确定出构件3作用在构件4上的力的方向。
maxα?=0αB '题10-1图Fv Dγ)(a DF Dv图示机构在图示位置的传动角γ分别如图中所示。
10-5 标出题10-5图中各个凸轮机构在图示位置时的压力角。
凸轮为主动件。
解:图中各个凸轮机构在图示位置时的压力角α如图所示。
)(b nnn=0αααvv vnnnn α题10-5图10-6 在题10-6图中,凸轮为主动件,画出凸轮逆时针转过30o 时机构的压力角。
解:利用反转法,即将凸轮固定、机架和从动件沿与凸轮转向相反的方向运动,固定铰链点A 从点A “反转”到点A ’,从动件从AB 运动到A ’B ’,再由点B ’的速度方向和从动件的受力方向确定出凸轮逆时针转过30o时机构的压力角α,如图所示。
原教材6-8 在题6-8图中凸轮为半径为R 的圆盘,凸轮为主动件。
(1)写出机构的压力角α与凸轮转角之间的关系;(2)讨论如果][αα≥,应采用什么改进设计的措施?解:(1)、当凸轮转动任意角δ时,其压力角α如图所示。
WE CAN DO BETTER.质心位于1s ,1S B l =17.5mm ,连杆质量为 4.53572kg,质心位于2s ,2S B l =145.6mm,转速为200r/min ,滑块质量为2.267985kg ,设曲柄为水平位置为初始位置,题10-2图试计算:1) t=1s 时滑块的速度和加速度,并比较精确解与级数展开的近似解的计算结果; 2) t=1s 机构的总惯性力;3) 在曲柄相反的方向上,距A 为r 处(自行给定)进行离心惯性力平衡所需的质量; 4) 尝试用曲柄附加质量完全平衡滑块的水平惯性力和综合考虑水平和垂直惯性力过平衡方法,计算机构的惯性力,并与没有平衡的机构惯性力进行比较。
(1)转速为200r/min ,即(10/3)r/s ,所以t=1s 时曲柄与水平方向夹角为120°其中X-Y 为定坐标系,X ’-Y ’是动坐标系;V 为实际速度,Va 为滑块的铰接点在动坐标系下的速度,Vq 为牵连速度AC q d V ⋅=ωγcot ⋅=q V V︒=+60βα︒=+90βγBCAB l l ︒⋅=60sin sin β︒-⋅=60cos cos AC BC AC l l d β0.362052928得出V=2.202583BC an l V a 2'=136.3746462642γsin qa v v ==7.8962325366ACq l a ⋅=2ω158.8141850421q na a a -=βcos '0=16.80285881369 得出0a =16.80285881369 级数展开方法:根据滑块的位移公式:()()2sin 1cos ⎥⎦⎤⎢⎣⎡-+=t l l l t l x BC AB BC AB ωω将滑块的位移公式中的根式使用级数展开为2462462461()sin ()sin ()sin 2816AB AB AB BC BC BCl l l t t t l l l ωωω=-+-+⋅⋅⋅ 从第二项以后各项的值很小可忽略,误差不足1%,从而可以得出滑块位移的近似表达式222cos (1sin )2ABAB BC BC l x l t l t l ωω≈+-对上式求一阶微分得tl l t l v BCABAB ωωωω2sin 2sin 2⋅⋅-⋅⋅-≈=2.3228216031对上式求二阶微分得222cos cos 2ABc AB BCl a l t tl ωωωω≈--=45.1528403912 (2)其中AB F 是杆AB 的惯性力;q F BC 是杆BC 的牵连惯性力,t F BC 是BC 杆相对惯性力的切矢量,n F BC 是BC 杆相对惯性力的法矢量;C F 是C 滑块的惯性力。