机械原理题库第九章机械的平衡
- 格式:doc
- 大小:1017.00 KB
- 文档页数:19
第1章平面机构的结构分析1.1解释下列概念1.运动副;2.机构自由度;3.机构运动简图;4.机构结构分析;5.高副低代。
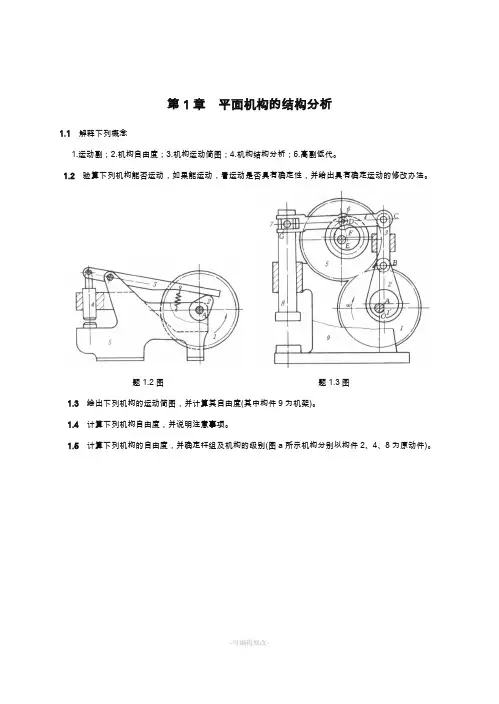
1.2验算下列机构能否运动,如果能运动,看运动是否具有确定性,并给出具有确定运动的修改办法。
题1.2图题1.3图1.3 绘出下列机构的运动简图,并计算其自由度(其中构件9为机架)。
1.4 计算下列机构自由度,并说明注意事项。
1.5计算下列机构的自由度,并确定杆组及机构的级别(图a所示机构分别以构件2、4、8为原动件)。
题1.4图题1.5图第2章平面机构的运动分析2.1试求图示各机构在图示位置时全部瞬心。
题2.1图2.2在图示机构中,已知各构件尺寸为l AB=180mm , l BC=280mm , l BD=450mm ,l CD=250mm ,l AE =120mm ,φ=30º, 构件AB上点E的速度为v E=150 mm /s ,试求该位置时C、D两点的速度及连杆2的角速度ω2。
2.3 在图示的摆动导杆机构中,已知l AB=30mm , l AC=100mm , l BD=50mm ,l DE=40mm ,φ1=45º,曲柄1以等角速度ω1=10 rad/s沿逆时针方向回转。
求D点和E点的速度和加速度及构件3的角速度和角加速度(用相对运动图解法)。
题2.2图题2.3图2.4 在图示机构中,已知l AB =50mm , l BC =200mm , x D =120mm , 原动件的位置φ1=30º, 角速度ω1=10 rad/s ,角加速度α1=0,试求机构在该位置时构件5的速度和加速度,以及构件2的角速度和角加速度。
题2.4图2.5 图示为机构的运动简图及相应的速度图和加速度图。
(1)在图示的速度、加速度多边形中注明各矢量所表示的相应的速度、加速度矢量。
(2)以给出的速度和加速度矢量为已知条件,用相对运动矢量法写出求构件上D 点的速度和加速度矢量方程。
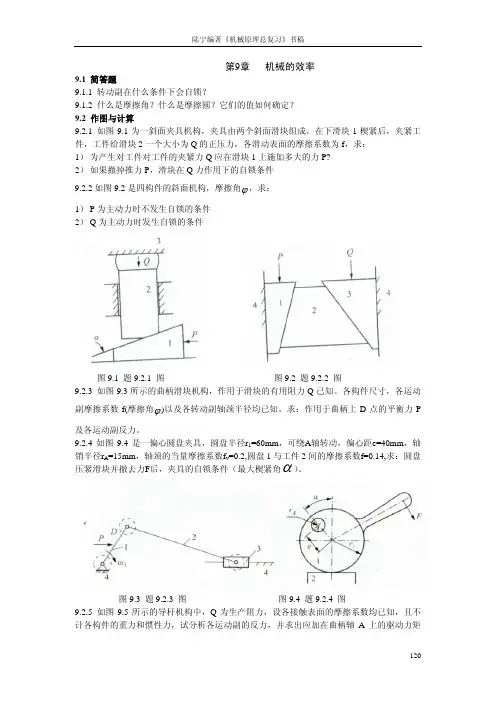
第9章机械的效率9.1 简答题9.1.1 转动副在什么条件下会自锁?9.1.2 什么是摩擦角?什么是摩擦圆?它们的值如何确定?9.2 作图与计算9.2.1 如图9.1为一斜面夹具机构,夹具由两个斜面滑块组成,在下滑块1楔紧后,夹紧工件,工件给滑块2一个大小为Q的正压力,各滑动表面的摩擦系数为f,求:1)为产生对工件对工件的夹紧力Q应在滑块1上施加多大的力P?2)如果撤掉推力P,滑块在Q力作用下的自锁条件9.2.2如图9.2是四构件的斜面机构,摩擦角ϕ,求:1)P为主动力时不发生自锁的条件2)Q为主动力时发生自锁的条件图9.1 题9.2.1 图图9.2 题9.2.2 图9.2.3 如图9.3所示的曲柄滑块机构,作用于滑块的有用阻力Q已知。
各构件尺寸,各运动副摩擦系数f(摩擦角ϕ)以及各转动副轴颈半径均已知。
求:作用于曲柄上D点的平衡力P及各运动副反力。
9.2.4如图9.4是一偏心圆盘夹具,圆盘半径r1=60mm,可绕A轴转动,偏心距e=40mm,轴销半径r A=15mm,轴颈的当量摩擦系数f v=0.2,圆盘1与工件2间的摩擦系数f=0.14,求:圆盘压紧滑块并撤去力F后,夹具的自锁条件(最大楔紧角α)。
图9.3 题9.2.3 图图9.4 题9.2.4 图9.2.5 如图9.5所示的导杆机构中,Q为生产阻力,设各接触表面的摩擦系数均已知,且不计各构件的重力和惯性力,试分析各运动副的反力,并求出应加在曲柄轴A上的驱动力矩120M。
9.2.6 如图9.6是一偏心圆盘杠杆机构,圆盘直径和偏心距均已知,圆盘与杠杆接触点处的摩擦角ϕ如图,铰链A,C处的摩擦圆大小如图,杠杆吊一重物Q公斤,试在图中标出各运动副反力的作用方向。
图9.5 题9.2.5 图图9.6 题9.2.6 图9.3 讨论题9.3.1 如何求机构的自锁条件?9.3.2 机构的自锁和死点这两个概念有何区别?作者诗词武夷峰三十六峰皆向东奇幻百出各不同云雾如海朦胧中势如万马渡苍穹121。
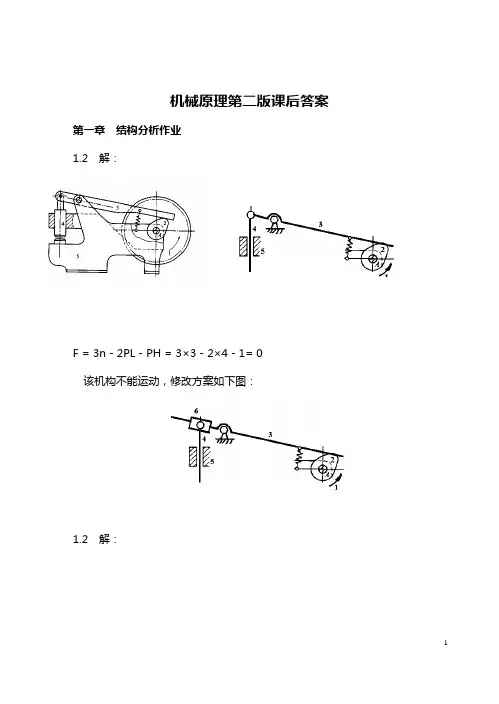
机械原理第二版课后答案第一章结构分析作业1.2 解:F = 3n-2PL-PH = 3×3-2×4-1= 0该机构不能运动,修改方案如下图:1.2 解:(a)F = 3n-2PL-PH = 3×4-2×5-1= 1 A点为复合铰链。
(b)F = 3n-2PL-PH = 3×5-2×6-2= 1B、E两点为局部自由度, F、C两点各有一处为虚约束。
(c)F = 3n-2PL-PH = 3×5-2×7-0= 1 FIJKLM为虚约束。
1.3 解:F = 3n-2PL-PH = 3×7-2×10-0= 11)以构件2为原动件,则结构由8-7、6-5、4-3三个Ⅱ级杆组组成,故机构为Ⅱ级机构(图a)。
2)以构件4为原动件,则结构由8-7、6-5、2-3三个Ⅱ级杆组组成,故机构为Ⅱ级机构(图b)。
3)以构件8为原动件,则结构由2-3-4-5一个Ⅲ级杆组和6-7一个Ⅱ级杆组组成,故机构为Ⅲ级机构(图c)。
(a) (b) (c)第二章 运动分析作业2.1 解:机构的瞬心如图所示。
2.2 解:取作机构位置mmmm l /5=μ图如下图所示。
1.求D 点的速度V D13P D V V =而 25241314==P P AE V V E D ,所以 s mm V V E D /14425241502524=⨯==2. 求ω1s rad l V AE E /25.11201501===ω3. 求ω2因 98382412141212==P P P P ωω ,所以s rad /46.0983825.1983812=⨯==ωω4. 求C 点的速度V Csmm C P V l C /2.10154446.0242=⨯⨯=⨯⨯=μω2.3 解:取作机构位置mmmm l /1=μ图如下图a 所示。
1. 求B2点的速度V B2V B2 =ω1×L AB =10×30= 300 mm/s 2.求B3点的速度V B3V B3 = V B2 + V B3B2 大小 ? ω1×L AB ? 方向 ⊥BC ⊥AB ∥BC取作速度多边mms mm v /10=μ形如下图b 所示,由图量得:mmpb 223= ,所以smm pb V v B /270102733=⨯=⨯=μ由图a 量得:BC=123 mm , 则mmBC l l BC 1231123=⨯=⨯=μ3. 求D 点和E 点的速度V D 、V E利用速度影像在速度多边形,过p 点作⊥CE ,过b 3点作⊥BE ,得到e 点;过e 点作⊥pb 3,得到d 点 , 由图量得:mmpd 15=,mmpe 17=,所以smm pd V v D /1501015=⨯=⨯=μ ,smm pe V v E /1701017=⨯=⨯=μ;smm b b V v B B /17010173223=⨯=⨯=μ4. 求ω3srad l V BC B /2.212327033===ω5. 求nB a 222212/30003010s mm l a ABn B =⨯=⨯=ω6. 求3B aa B3 = a B3n + a B3t = a B2 + aB3B2k + aB3B2τ大小 ω32LBC ? ω12LAB 2ω3VB3B2 ? 方向 B →C ⊥BC B →A ⊥BC ∥BC 22233/5951232.2s mm l a BCn B =⨯=⨯=ω223323/11882702.222s mm V a B B k B B =⨯⨯=⨯=ω取作速度多边mms mm a 2/50=μ形如上图c 所示,由图量得:mmb 23'3=π ,mmb n 20'33=,所以233/11505023's mm b a a B =⨯=⨯=μπ2333/10005020's mm b n a at B =⨯=⨯=μ7. 求3α233/13.81231000s rad l a BC tB ===α8. 求D 点和E 点的加速度aD 、a E利用加速度影像在加速度多边形,作e b 3'π∆∽CBE ∆, 即BE eb CEeCBb 33''==ππ,得到e 点;过e 点作⊥3'b π,得到d 点 , 由图量得:mm e 16=π,mmd 13=π,所以2/6505013s mm d a a D =⨯=⨯=μπ ,2/8005016s mm e a a E =⨯=⨯=μπ 。
第六章机械的平衡机械平衡的目的是尽可能地消除或减小惯性力对机械的不良影响。
为达到此目的,通常需要做两方面的工作:首先,在机械的设计阶段,对所设计的机械在满足其工作要求的前提下,应在结构上保证其不平衡惯性力最小或为零,即进行平衡设计;其次,经过平衡设计后的机械,由于材质不均、加工及装配误差等因素的影响,生产出来的机械往往达不到设计要求,还会有不平衡现象,此时需要用试验的方法加以平衡,即进行平衡试验。
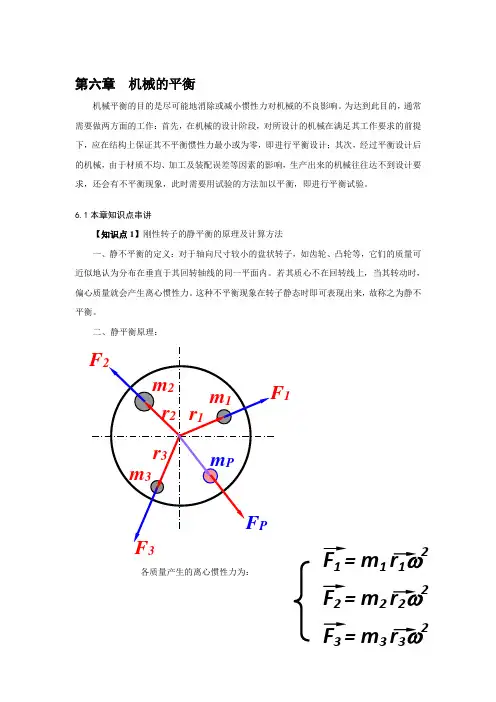
6.1本章知识点串讲【知识点1】刚性转子的静平衡的原理及计算方法一、静不平衡的定义:对于轴向尺寸较小的盘状转子,如齿轮、凸轮等,它们的质量可近似地认为分布在垂直于其回转轴线的同一平面内。
若其质心不在回转线上,当其转动时,偏心质量就会产生离心惯性力。
这种不平衡现象在转子静态时即可表现出来,故称之为静不平衡。
二、静平衡原理:各质量产生的离心惯性力为:13F1 = m1 r1ω2F2 = m2 r2ω2F3 = m3 r3ω2若:F 1+F 2 +F3 ≠ 0——表明此回转体为非平衡回转体。
人为增加一个质量点m P ,该质量点产生一个离心惯性力F P ,F 1+F 2 +F3+F P = 0称对此回转体进行了平衡。
结论:若欲使回转体处于平衡,则各质量点的质径积(或重径积)的矢量和为零。
三、求解方法主要有矢量图解法和坐标轴投影法。
A.矢量图解法其中W i = m i r i ,称为质径积。
用矢量图解法进行求解时,一定要选取合适的比例尺,作图要尽量准确。
平衡条件为:m 1 r 1 + m 2 r 2 + m 3 r 3 + m P r P =0 B.坐标轴投影法【知识点2】刚性转子的动平衡的原理及计算方法一、动不平衡的定义:对于轴向尺寸较大的转子,如内燃机曲轴和机床主轴等,其偏心质量分布在不同的回转平面内。
在这种情况下,即使转子的质心在回转轴线上,由于各偏心质量所产生的离心惯性力不在同一回转平面内,因而将形成惯性力偶,所以仍然是不平衡的。
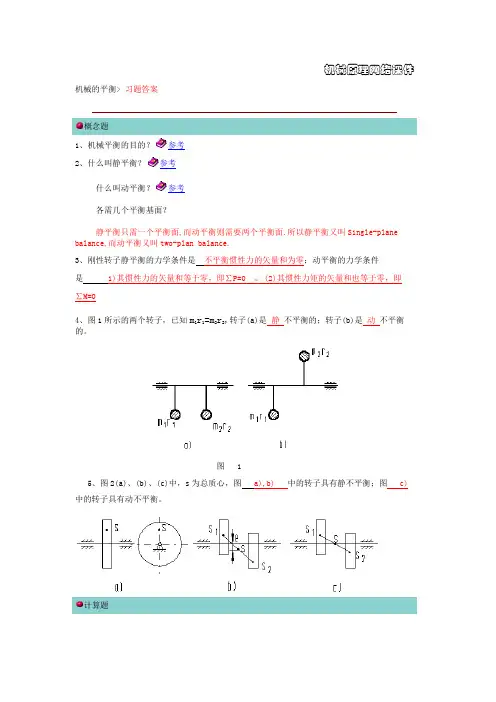
机械原理网络课件机械的平衡>习题答案概念题1、机械平衡的目的?参考2、什么叫静平衡?参考什么叫动平衡?参考各需几个平衡基面?静平衡只需一个平衡面,而动平衡则需要两个平衡面.所以静平衡又叫Single-plane balance,而动平衡又叫two-plan balance.3、刚性转子静平衡的力学条件是不平衡惯性力的矢量和为零;动平衡的力学条件是1)其惯性力的矢量和等于零,即∑P=0。
(2)其惯性力矩的矢量和也等于零,即∑M=04、图1所示的两个转子,已知m1r1=m2r2,转子(a)是静不平衡的;转子(b)是动不平衡的。
图 15、图2(a)、(b)、(c)中,s为总质心,图a),b) 中的转子具有静不平衡;图 c) 中的转子具有动不平衡。
计算题1、如图所示曲轴上,四个曲拐位于同一平面内,若质径积m1r1=m2r2=m3r3=m4r4,l1=l2=l3,试判断该曲轴是否符合动平衡条件?为什么?该曲轴符合动平衡条件2、高速水泵的凸轮轴系由三个互相错开120º的偏心轮组成,每一偏心轮的质量为m,其偏心距为r,设在平衡平面A和B上个装一个平衡质量m A和m B,其回转半径为2r,其他尺寸如图所示。
试求m A和m B的大小和方位(可用图解法)。
题 23、如图所示为一钢质圆盘。
盘厚δ=20mm,在向径r1=100mm处有一直径d=50mm的通孔,向径r2=200mm处有一重量为2N的重块,为使圆盘满足静平衡条件,拟在向径r=200的圆周上再钻一通孔,试求次通孔的直径和方位(钢的重度γ=7.6×10-5N/mm3)。
题 34.A system of two coplanar(同一平面) arms on a common shaft, as shown in the right figure is to be designed. For the row(s) assigned in Table 1, find the shaking force of the linkage when run unbalanced at 10rad/sec and design a counterweight to statically balance the system.a mb r b =0.934 θb =-75.5ºc m b r b =5.932θb =152.3ºem b r b =7.448 θb =-80.76º5.A wheel and tire assembly has been run at 100 rpm on a dynamic balancing machine as shown in the following figure. The force measured at the left bearing had a peak of 5 lb at a phase angle of 45º with respect to the zero reference angle on the tire. The force measured at the right bearing had a peak of 2 lb at a phase angle of -120º with respect to thereference zero on the tire. The center distance between the two bearings on the machine is 10 in. The wheel is 7 in wide at the rim.Calculate the size and location with respect to the tire's zero reference angle, of balance weights needed on each side of the rim to dynamically balance the assembly(The whell rim diameter is 15 in).Answer:Wa=3.56lb θ=44.44ºa=-129.4ºWb=2.13lb θb。
02401、研究机械平衡的目的是部分或完全消除构件在运动时所产生的 ,减少或消除在机构各运动副中所引起的 力,减轻有害的机械振动,改善机械工作性能和延长使用寿命。
02402、回转构件的直径D 和轴向宽度b 之比b D 符合 条件或有重要作用的回转构件,必须满足动平衡条件方能平稳地运转。
如不平衡,必须至少在个校正平面上各自适当地加上或去除平衡质量,方能获得平衡。
02403、只使刚性转子的 得到平衡称静平衡,此时只需在 平衡平面中增减平衡质量;使 同时达到平衡称动平衡,此时至少要在 个选定的平衡平面中增减平衡质量,方能解决转子的不平衡问题。
02404、刚性转子静平衡的力学条件是 ,而动平衡的力学条件是 。
02405、图示两个转子,已知2211r m r m ,转子a 是 不平衡的,转子b 是不平衡的。
a)b)02406、符合静平衡条件的回转构件,其质心位置在 。
静不平衡的回转构件,由于重力矩的作用,必定在 位置静止,由此可确定应加上或去除平衡质量的方向。
02407、回转构件的直径D 和轴向宽度b 之比b D 符合 条件的回转构件,只需满 足静平衡条件就能平稳地回转。
如不平衡,可在 个校正平面上适当地加上或去除平衡质量就能获得平衡。
02408、图a 、b 、c 中,S 为总质心,图 中的转子具有静不平衡,图 中的转子是动不平衡。
02409、当回转构件的转速较低,不超过 范围,回转构件可以看作刚性物体,这类平衡称为刚性回转件的平衡。
随着转速上升并超越上述范围,回转构件出现明显变形,这类回转件的平衡问题称为 回转件的平衡。
02410、机构总惯性力在机架上平衡的条件是 。
02411、在图示a 、b 、c 三根曲轴中,已知44332211r m r m r m r m ===,并作轴向等间隔布置,且都在曲轴的同一含轴平面内,则其中 轴已达静平衡, 轴已达动平衡。
02412、连杆机构总惯性力平衡的条件是 ,它可以采用附加平衡质量或者附加 等方法来达到。
机械原理课后全部习题答案目录第1章绪论 (1)第2章平面机构的结构分析 (3)第3章平面连杆机构 (8)第4章凸轮机构及其设计 (15)第5章齿轮机构 (19)第6章轮系及其设计 (26)第8章机械运动力学方程 (32)第9章平面机构的平衡 (39)第一章绪论一、补充题1、复习思考题1)、机器应具有什么特征?机器通常由哪三部分组成?各部分的功能是什么?2)、机器与机构有什么异同点?3)、什么叫构件?什么叫零件?什么叫通用零件和专用零件?试各举二个实例。
4)、设计机器时应满足哪些基本要求?试选取一台机器,分析设计时应满足的基本要求。
2、填空题1)、机器或机构,都是由组合而成的。
2)、机器或机构的之间,具有确定的相对运动。
3)、机器可以用来人的劳动,完成有用的。
4)、组成机构、并且相互间能作的物体,叫做构件。
5)、从运动的角度看,机构的主要功用在于运动或运动的形式。
6)、构件是机器的单元。
零件是机器的单元。
7)、机器的工作部分须完成机器的动作,且处于整个传动的。
8)、机器的传动部分是把原动部分的运动和功率传递给工作部分的。
9)、构件之间具有的相对运动,并能完成的机械功或实现能量转换的的组合,叫机器。
3、判断题1)、构件都是可动的。
()2)、机器的传动部分都是机构。
()3)、互相之间能作相对运动的物件是构件。
()4)、只从运动方面讲,机构是具有确定相对运动构件的组合。
()5)、机构的作用,只是传递或转换运动的形式。
()6)、机器是构件之间具有确定的相对运动,并能完成有用的机械功或实现能量转换的构件的组合。
()7)、机构中的主动件和被动件,都是构件。
()2 填空题答案1)、构件2)、构件3)、代替机械功4)、相对运动5)、传递转换6)、运动制造7)、预定终端8)、中间环节9)、确定有用构件3判断题答案1)、√2)、√3)、√4)、√5)、×6)、√7)、√第二章 机构的结构分析2-7 是试指出图2-26中直接接触的构件所构成的运动副的名称。
第二章一、单项选择题:1.两构件组成运动副的必备条件是。
A.直接接触且具有相对运动;B.直接接触但无相对运动;C.不接触但有相对运动;D.不接触也无相对运动。
2.当机构的原动件数目小于或大于其自由度数时,该机构将确定的运动。
A.有;B.没有;C.不一定3.在机构中,某些不影响机构运动传递的重复部分所带入的约束为。
A.虚约束;B.局部自由度;C.复合铰链4.用一个平面低副联二个做平面运动的构件所形成的运动链共有个自由度。
A.3;B.4;C.5;D.65.杆组是自由度等于的运动链。
A.0;B.1;C.原动件数6.平面运动副所提供的约束为A.1;B.2;C.3;D.1或27.某机构为Ⅲ级机构,那么该机构应满足的必要充分条件是。
A.含有一个原动件组;B.至少含有一个基本杆组;C.至少含有一个Ⅱ级杆组;D.至少含有一个Ⅲ级杆组。
8.机构中只有一个。
A.闭式运动链;B.原动件;C.从动件;D.机架。
9.要使机构具有确定的相对运动,其条件是。
A.机构的自由度等于1;B.机构的自由度数比原动件数多1;C.机构的自由度数等于原动件数二、填空题:1.平面运动副的最大约束数为_____,最小约束数为______。
2.平面机构中若引入一个高副将带入_______个约束,而引入一个低副将带入_____个约束。
3.两个做平面平行运动的构件之间为_______接触的运动副称为低副,它有_______个约束;而为_______接触的运动副为高副,它有_______个约束。
4.在平面机构中,具有两个约束的运动副是_______副或_______副;具有一个约束的运动副是_______副。
5.组成机构的要素是________和________;构件是机构中的_____单元体。
6.在平面机构中,一个运动副引入的约束数的变化范围是_______。
7.机构具有确定运动的条件是____________________________________________。
02401、研究机械平衡的目的是部分或完全消除构件在运动时所产生的 ,减少或消除在机构各运动副中所引起的 力,减轻有害的机械振动,改善机械工作性能和延长使用寿命。
02402、回转构件的直径D 和轴向宽度b 之比b D 符合 条件或有重要作用的回转构件,必须满足动平衡条件方能平稳地运转。
如不平衡,必须至少在个校正平面上各自适当地加上或去除平衡质量,方能获得平衡。
02403、只使刚性转子的 得到平衡称静平衡,此时只需在 平衡平面中增减平衡质量;使 同时达到平衡称动平衡,此时至少要在 个选定的平衡平面中增减平衡质量,方能解决转子的不平衡问题。
02404、刚性转子静平衡的力学条件是 ,而动平衡的力学条件是 。
02405、图示两个转子,已知2211r m r m ,转子a 是 不平衡的,转子b 是不平衡的。
a)b)02406、符合静平衡条件的回转构件,其质心位置在 。
静不平衡的回转构件,由于重力矩的作用,必定在 位置静止,由此可确定应加上或去除平衡质量的方向。
02407、回转构件的直径D 和轴向宽度b 之比b D 符合 条件的回转构件,只需满 足静平衡条件就能平稳地回转。
如不平衡,可在 个校正平面上适当地加上或去除平衡质量就能获得平衡。
02408、图a 、b 、c 中,S 为总质心,图 中的转子具有静不平衡,图 中的转子是动不平衡。
02409、当回转构件的转速较低,不超过 范围,回转构件可以看作刚性物体,这类平衡称为刚性回转件的平衡。
随着转速上升并超越上述范围,回转构件出现明显变形,这类回转件的平衡问题称为 回转件的平衡。
02410、机构总惯性力在机架上平衡的条件是 。
02411、在图示a 、b 、c 三根曲轴中,已知44332211r m r m r m r m ===,并作轴向等间隔布置,且都在曲轴的同一含轴平面内,则其中 轴已达静平衡, 轴已达动平衡。
02412、连杆机构总惯性力平衡的条件是 ,它可以采用附加平衡质量或者附加 等方法来达到。
02413、对于绕固定轴回转的构件,可以采用 的方法使构件上所有质量的惯性力形成平衡力系,达到回转构件的平衡。
若机构中存 在作往复运动或平面复合运动的构件应采用 方法,方能使作用于机架上的总惯性力得到平衡。
02414、若刚性转子满足动平衡条件,这时我们可以说该转子也满足静平衡条件。
( )02415、不论刚性回转体上有多少个平衡质量,也不论它们如何分布,只需要在任意选定两个平面内,分别适当地加平衡质量即可达到动平衡。
- - - - - ( )02416、设计形体不对称的回转构件,虽已进行精确的平衡计算,但在制造过程中仍需安排平衡校正工序。
- - - - - - - - - - - - - - - - - - - - - - - - - - - ( )02417、经过动平衡校正的刚性转子,任一回转面内仍可能存在偏心质量。
- - ( )02419、为了完全平衡四杆铰链机构的总惯性力,可以采用在AB 杆和CD 杆上各自加上平衡质量m '和m ''来达到。
平衡质量的位置和大小应通过计算求得。
( )02420、通常提到连杆机构惯性力平衡是指使连杆机构与机架相联接的各个运动副内动反力全为零,从而减小或消除机架的振动。
- - - - - - - ( )02421、作往复运动或平面复合运动的构件可以采用附加平衡质量的方法使它的惯性力在构件内部得到平衡。
- - - - - - - - - - - - - - ( )02422、若机构中存在作往复运动或平面复合运动的构件,则不论如何调整质量分布仍不可能消除运动副中的动压力。
-- - - - - - - - - - - ( )02423、绕定轴摆动且质心与摆动轴线不重合的构件,可在其上加减平衡质量来达到惯性力系平衡的目的。
- - - - - - - - - - - - - - - - - - - - ( )02424、为了完全平衡四杆铰链机构ABCD 的总惯性力,可以采用在原机构上附加另一四杆铰链机构D C B A ''来达到。
条件是B A AB l l '=,C B BC l l '=,D C CD l l '=,各杆件质量分布和大小相同。
- - - - - - - - - - - - - - ( )02425、图示一行星轮系传动装置。
设该装置中各零件的材料均匀,制造精确,安装正确,则该装置绕AB 轴线 回转时是处于 状态。
A)静不平衡(合惯性力0b≠∑F)B)静平衡(合惯性力0b=∑F )C)完全不平衡(合惯性力0b≠∑F,合惯性力矩0b≠∑M)D)动平衡(合惯性力0b=∑F,合惯性力矩0b=∑M)02426、设图示回转体的材料均匀,制造精确,安装正确,当它绕AA 轴线回转时是处于 状态。
A)静不平衡(合惯性力0b≠∑F)B)静平衡(合惯性力0b=∑F )C)完全不平衡(合惯性力0b≠∑F,合惯性力矩0b≠∑M)D)动平衡(合惯性力0b=∑F,合惯性力矩0b=∑M)02427、图示一圆柱凸轮。
设该凸轮的材料均匀,制造精确,安装正确,则当它绕AA 轴线转动时,是处于 状态。
A)静不平衡 (合惯性力0b≠∑F)B)静平衡(合惯性力0b=∑F )C)完全不平衡(合惯性力0b≠∑F,合惯性力矩0b≠∑M)D)动平衡(合惯性力0b=∑F,合惯性力矩0b=∑M)02429、机械平衡研究的内容是 A) 驱动力与阻力间的平衡 B) 各构件作用力间的平衡 C) 惯性力系间的平衡D) 输入功率与输出功率间的平衡02430、图示一变直径带轮。
设该带轮的材料均匀,制造精确,安装正确,当它绕AA 轴线回转时是处于 状态。
A) 静不平衡(合惯性力0b≠∑F)B) 静平衡(合惯性力0b=∑F )C) 完全不平衡(合惯性力0b≠∑F,合惯性力矩0b≠∑M)D) 动平衡(合惯性力0b=∑F,合惯性力矩0b=∑M)02431、图示一发动机曲轴,设各曲拐部分的质量及质心至回转轴线的距离都相等,当该曲轴绕OO 轴线回转时是处于 状态。
A) 静不平衡(合惯性力0b≠∑F)B) 静平衡 (合惯性力0b=∑F)C) 完全不平衡(合惯性力0b≠∑F,合惯性力矩0b≠∑M)D) 动平衡(合惯性力0b=∑F,合惯性力矩0b=∑M)02432、图示一附加上齿轮平衡装置的曲柄滑块机构。
设曲柄AB 的质心在A 处,滑块的质心在C 处,连杆质量忽略,平衡质量b a m m =,b a r r =,b a ϕϕ=,当正确选择平衡质量的质径积a a r m 大小后,可使该曲柄 滑块机构达到 。
A) 机构的总惯性力全部平衡,但产生附加惯性力偶矩。
B) 机构的总惯性力全部平衡,不产生附加惯性力偶矩。
C) 机构的一级惯性力(即惯性力中具有与曲柄转动频率相同的频率分量)得到平衡,但产生附加惯性力偶矩。
D) 机构的一级惯性力得到平衡,亦不产生附加惯性力偶矩。
02433、图示为一曲柄滑块机构(不计曲柄与连杆的质量)。
为了平衡滑块C 往复时产生的往复惯性力,在曲柄AB 的延长线上附加平衡质量b m ,当合理选择平衡质量质径积b b r m 的大小后,可使该曲柄滑块达到 。
A) 平衡全部往复惯性力,在其他方向也不引起附加惯性力。
B) 平衡全部往复惯性力,在铅垂方向引起附加惯性力。
C) 平衡滑块第一级惯性力,在其他方向也不引起附加惯性力。
D) 平衡滑块第一级惯性力的全部或部分,在铅垂方向引起附加惯性力。
02434、图示一附加上齿轮平衡装置的曲柄滑块机构。
设曲柄AB 的质心在A 处,连杆BC 的质量忽略,滑块C 的质心在C 处,齿轮E 和F 上装置的平衡质量为m ,位置如图示。
当正确选择平衡质量的质径积大小后,可使该曲柄滑块机构达到 。
A) 机构的总惯性力全部平衡,且不产生附加惯性力偶矩。
B) 机构的总惯性力全部平衡,但产生附加惯性力偶矩。
C)机构的一级惯性力(即惯性力中具有与曲柄转动频率相同的频率分量)全部平衡,且不产生附加惯性力偶矩。
D) 机构的一级惯性力全部平衡,但产生附加惯性力偶矩。
02435、为了平衡曲柄滑块机构ABC 中滑块C 的往复惯性力(曲柄和连杆质量不计),在原机构上附加一对称滑块机构C B A ''。
设滑块C 和C '质量相等,B A AB l l '=,C B BC l l ''=,机构在运转时能达到 。
A) 惯性力全部平衡,且不产生附加惯性力偶矩。
B) 惯性力全部平衡,但产生附加惯性力偶矩。
C) 惯性力部分平衡,且不产生附加惯性力偶矩。
D) 惯性力部分平衡,但产生附加惯性力偶矩。
02436、为了平衡曲柄滑块机构ABC 中滑块C 的往复惯性力,在原机构上附加一滑块机构C B A '',给定 B A AB l l '=, C B BC l l ''=,滑块C 和C '的质量都为m ,曲柄和连杆的质量忽略,该机构在运转时能达到 .。
A) 惯性力全部平衡,且不产生附加惯性力偶矩。
B) 惯性力全部平衡,产生附加惯性力偶矩。
C) 惯性力部分平衡,且不产生附加惯性力偶矩。
D) 惯性力部分平衡,产生附加惯性力偶矩。
02437、为什么说经过静平衡的转子不一定是动平衡的,而经过动平衡的转子必定是静平衡的?02438、举出工程中需满足静平衡条件的转子的两个实例,需满足动平衡条件的转子的三个实例。
02439、何谓转子的静平衡及动平衡?对于任何不平衡转子,采用在转子上加平衡质量使其达到静平衡的方法是否对改善支承反力总是有利的?为什么?02440、图示刚性转子是否符合动平衡条件,为什么?02441、在图示曲轴上,四个曲拐位于同一平面内,若质径积44332211r m r m r m r m ===,231l l l ≠=,试判断该曲轴是否符合动平衡条件?为什么?02442、图示两个回转构件是否符合静平衡条件?是否符合动平衡条件?为什么?02443、刚性转子动平衡中提到的不平衡惯性力偶矩与转子的惯性力偶矩M =αS J -是否相同?为什么?02444、图示盘状转子上有两个不平衡质量:5.11=m kg ,kg 8.02=m ,mm 1401=r ,mm 1802=r ,相位如图。
现用去重法来平衡,求所需挖去的质量的大小和相位(设挖去质量处的半径mm 140=r )。
02445、如图所示一单缸卧式煤气机,在曲柄轴的两端装有两个飞轮A 和B 。
已知曲柄半径mm 250=R 及换算到曲柄销S 的不平衡质量为kg 50。
欲在两飞轮上各装一平衡质量A m 和B m ,其回转半径mm 600=r ,试求A m 和B m 的大小和位置。