机械原理第七版第6章机械的平衡
- 格式:ppt
- 大小:967.00 KB
- 文档页数:29

机械原理复习题第2章 机构的结构分析1.组成机构的要素是构件和运动副;构件是机构中的运动单元体。
2.具有若干个构件的入为组合体、各构件间具有确定的相对运动、完成有用功或实现能量转换等三个特征的构件组合体称为机器。
3.机器是由原动机、传动部分、工作机所组成的。
4.机器和机构的主要区别在于是否完成有用机械功或实现能量转换。
5.从机构结构观点来看,任何机构是由机架,杆组,原动件三部分组成。
6.运动副元素是指构成运动副的点、面、线。
7.构件的自由度是指构件具有独立运动的数目; 机构的自由度是指机构具有确定运动时必须给定的独立运动数目。
8.两构件之间以线接触所组成的平面运动副称为高副,它产生一个约束,而保留了两个自由度。
9.机构中的运动副是指两构件直接接触而又能产生相对运动的联接。
10.机构具有确定的相对运动条件是原动件数等于机构的自由度。
11.在平面机构中若引入一个高副将引入1个约束,而引入一个低副将引入2个约束,构件数、约束数与机构自由度的关系是F=3n-2pl-ph 。
12.平面运动副的最大约束数为2,最小约束数为1。
13.当两构件构成运动副后,仍需保证能产生一定的相对运动,故在平面机构中,每个运动副引入的约束至多为2,至少为1。
14.计算机机构自由度的目的是判断该机构运动的可能性(能否运动〕及在什么条件下才具有确定的运动,即确定应具有的原动件数。
15.在平面机构中,具有两个约束的运动副是低副,具有一个约束的运动副是高副。
16.计算平面机构自由度的公式为F =32n p p --L H ,应用此公式时应注意判断:(A) 复合铰链,(B) 局部自由度,(C)虚约束。
17.机构中的复合铰链是指由三个或三个以上构件组成同一回转轴线的转动副;局部自由度是指不影响输入与输出件运动关系的自由度;虚约束是指在特定的几何条件下,机构中不能起独立限制运动作用的约束。
18.划分机构杆组时应先按低的杆组级别考虑,机构级别按杆组中的最高级别确定。

机械原理复习题第2章 机构的结构分析1.组成机构的要素是构件和运动副;构件是机构中的运动单元体。
2.具有若干个构件的入为组合体、各构件间具有确定的相对运动、完成有用功或实现能量转换等三个特征的构件组合体称为机器。
3.机器是由原动机、传动部分、工作机所组成的。
4.机器和机构的主要区别在于是否完成有用机械功或实现能量转换。
5.从机构结构观点来看,任何机构是由机架,杆组,原动件三部分组成。
6.运动副元素是指构成运动副的点、面、线。
7.构件的自由度是指构件具有独立运动的数目; 机构的自由度是指机构具有确定运动时必须给定的独立运动数目。
8.两构件之间以线接触所组成的平面运动副称为高副,它产生一个约束,而保留了两个自由度。
9.机构中的运动副是指两构件直接接触而又能产生相对运动的联接。
10.机构具有确定的相对运动条件是原动件数等于机构的自由度。
11.在平面机构中若引入一个高副将引入1个约束,而引入一个低副将引入2个约束,构件数、约束数与机构自由度的关系是F=3n-2pl-ph 。
12.平面运动副的最大约束数为2,最小约束数为1。
13.当两构件构成运动副后,仍需保证能产生一定的相对运动,故在平面机构中,每个运动副引入的约束至多为2,至少为1。
14.计算机机构自由度的目的是判断该机构运动的可能性(能否运动〕及在什么条件下才具有确定的运动,即确定应具有的原动件数。
15.在平面机构中,具有两个约束的运动副是低副,具有一个约束的运动副是高副。
16.计算平面机构自由度的公式为F =32n p p --L H ,应用此公式时应注意判断:(A) 复合铰链,(B) 局部自由度,(C)虚约束。
17.机构中的复合铰链是指由三个或三个以上构件组成同一回转轴线的转动副;局部自由度是指不影响输入与输出件运动关系的自由度;虚约束是指在特定的几何条件下,机构中不能起独立限制运动作用的约束。
18.划分机构杆组时应先按低的杆组级别考虑,机构级别按杆组中的最高级别确定。
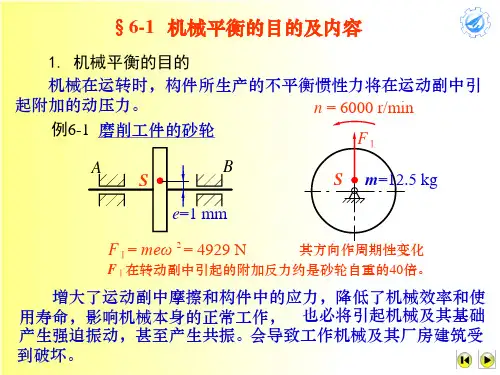
第6章机械的平衡6.1 复习笔记一、机械平衡的目的及内容1.机械平衡的目的(1)设法将构件的不平衡惯性力加以平衡以消除或减小其不良影响;(2)对于利用不平衡惯性力产生的振动来工作的机械,则需考虑如何合理利用不平衡惯性力的问题。
2.机械平衡的内容(1)绕固定轴回转的构件的惯性力平衡绕固定轴回转的构件统称为转子,分为刚性转子和挠性转子。
①刚性转子的平衡a.刚性转子的定义在工作过程中产生的弹性形变甚小的转子称为刚性转子。
b.特点第一,刚性较好,共振转速较高;第二,工作转速低于(0.6~0.75)n c1(n c1为转子的第一阶临界转速)。
c.平衡理论刚性转子的平衡按理论力学中的力系平衡来进行。
d.转子的静平衡和动平衡第一,转子的静平衡只要求其惯性力平衡,称为转子的静平衡;第二,转子的动平衡同时要求其惯性力和惯性力矩平衡,称为转子的动平衡。
②挠性转子的平衡a.挠性转子的定义在工作过程中产生较大的弯曲变形,使其惯性力显著增大的转子称为挠性转子。
b.特点第一,质量和跨度很大;第二,径向尺寸较小,共振转速较低;第三,工作转速n很高(n≥(0.6~0.75)n c1)。
c.平衡理论挠性转子的平衡原理是基于弹性梁的横向振动理论。
(2)机构的平衡作往复移动或平面复合运动的构件,其所产生的惯性力无法在该构件本身上平衡,必须研究整个机构使各运动构件惯性力的合力和合力偶得到完全或部分平衡,以消除或降低最终传到机械基础上的不平衡惯性力,满足上述条件的平衡称为机械在机座上的平衡。
二、刚性转子的平衡计算1.刚性转子的静平衡计算(1)静不平衡①定义 由于质心不在回转轴心上而使转子在静态时表现出来的不平衡现象称为静不平衡。
②特点a .对象为转子轴向宽度b 与其直径D 之比b/D <0.2的转子;b .转子的质心不在回转轴线上,当其转动时,偏心质量就会产生离心惯性力。
(2)静平衡的计算如图6-1-1所示为一盘状转子,已知其具有偏心质量m 1、m 2,各自的回转半径为r 1、r 2,转子角速度为ω。
九、机械平衡,减少或消除在机构各运动副中所引起的力,减轻有害的机械振动,改善机械工作性能和延长使用寿命。
D和轴向宽度b之比D/b符合条件或有重要作用的回转构件,必须满足动平衡条件方能平稳地运转。
如不平衡,必须至少在个校正平面上各自适当地加上或去除平衡质量,方能获得平衡。
得到平衡称静平衡,此时只需在平衡平面中增减平衡质量;使同时到达平衡称动平衡,此时至少要在个选定的平衡平面中增减平衡质量,方能解决转子的不平衡问题。
,而动平衡的力学条件是。
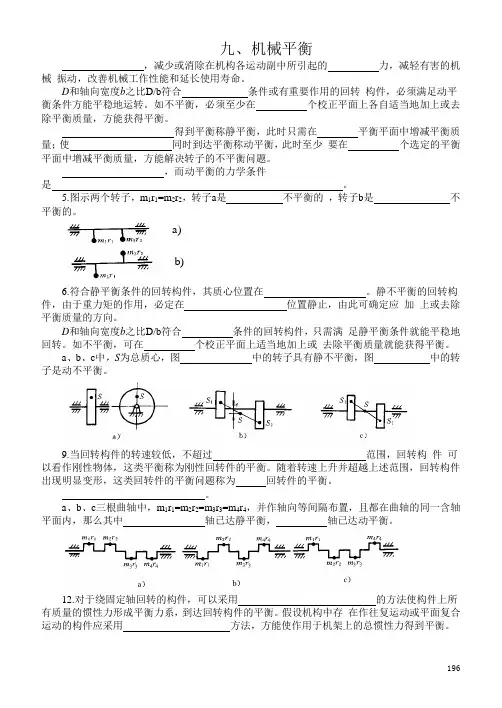
5.图示两个转子,m1r1=m2r2,转子a是不平衡的,转子b是不平衡的。
a)b)6.符合静平衡条件的回转构件,其质心位置在。
静不平衡的回转构件,由于重力矩的作用,必定在位置静止,由此可确定应加上或去除平衡质量的方向。
D和轴向宽度b之比D/b符合条件的回转构件,只需满足静平衡条件就能平稳地回转。
如不平衡,可在个校正平面上适当地加上或去除平衡质量就能获得平衡。
a、b、c中,S为总质心,图中的转子具有静不平衡,图中的转子是动不平衡。
9.当回转构件的转速较低,不超过范围,回转构件可以看作刚性物体,这类平衡称为刚性回转件的平衡。
随着转速上升并超越上述范围,回转构件出现明显变形,这类回转件的平衡问题称为回转件的平衡。
a、b、c三根曲轴中,m1r1=m2r2=m3r3=m4r4,并作轴向等间隔布置,且都在曲轴的同一含轴平面内,那么其中轴已达静平衡,轴已达动平衡。
12.对于绕固定轴回转的构件,可以采用的方法使构件上所有质量的惯性力形成平衡力系,到达回转构件的平衡。
假设机构中存在作往复运动或平面复合运动的构件应采用方法,方能使作用于机架上的总惯性力得到平衡。
19613.对于绕固定轴回转的构件,可以采用的方法使构件上所有质量的惯性力形成平衡力系,到达回转构件的平衡。
假设机构中存在作往复运动或平面复合运动的构件应采用方法,方能使作用于机架上的总惯性力得到平衡。
14.假设刚性转子满足动平衡条件,这时我们可以说该转子也满足静平衡条件。