机械原理课后答案——第十章_机械的平衡2222
- 格式:ppt
- 大小:212.50 KB
- 文档页数:70
习题解答第一章绪论1-1 答:1 )机构是实现传递机械运动和动力的构件组合体。
如齿轮机构、连杆机构、凸轮机构、螺旋机构等。
2 )机器是在组成它的实物间进行确定的相对运动时,完成能量转换或做功的多件实物的组合体。
如电动机、内燃机、起重机、汽车等。
3 )机械是机器和机构的总称。
4 )a. 同一台机器可由一个或多个机构组成。
b. 同一个机构可以派生出多种性能、用途、外型完全不同的机器。
c. 机构可以独立存在并加以应用。
1-2 答:机构和机器,二者都是人为的实物组合体,各实物之间都具有确定的相对运动。
但后者可以实现能量的转换而前者不具备此作用。
1-3 答:1 )机构的分析:包括结构分析、运动分析、动力学分析。
2 )机构的综合:包括常用机构设计、传动系统设计。
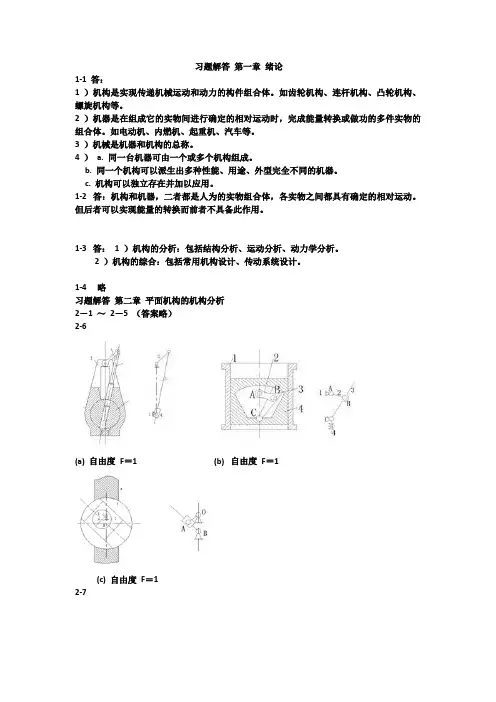
1-4 略习题解答第二章平面机构的机构分析2-1 ~2-5 (答案略)2-6(a) 自由度F=1 (b) 自由度F=1(c) 自由度F=12-7题2 -7 图F =3 × 7 -2 × 9 -2 =12 -8a) n =7 =10 =0 F =3×7-2×10 =1b) B 局部自由度n =3 =3 =2 F=3×3 -2×3-2=1c) B 、D 局部自由度n =3 =3 =2 F=3×3 -2×3-2 =1d) D( 或C) 处为虚约束n =3 =4 F=3×3 -2×4=1e) n =5 =7 F=3×5-2×7=1f) A 、B 、C 、E 复合铰链n =7 =10 F =3×7-2×10 =1g) A 处为复合铰链n =10 =14 F =3×10 -2×14=2h) B 局部自由度n =8 =11 =1 F =3×8-2×11-1 =1i) B 、J 虚约束C 处局部自由度n =6 =8 =1 F =3×6 -2×8-1=1j) BB' 处虚约束A 、C 、D 复合铰链n =7 =10 F =3×7-2×10=1 k) C 、D 处复合铰链n=5 =6 =2F =3×5-2×6-2 =1l) n =8 =11 F =3×8-2×11 =2m) B 局部自由度I 虚约束4 杆和DG 虚约束n =6 =8 =1 F =3×6-2×8-1 =12-9a) n =3 =4 =1 F =3 × 3 -2 × 8 -1 =0 不能动。
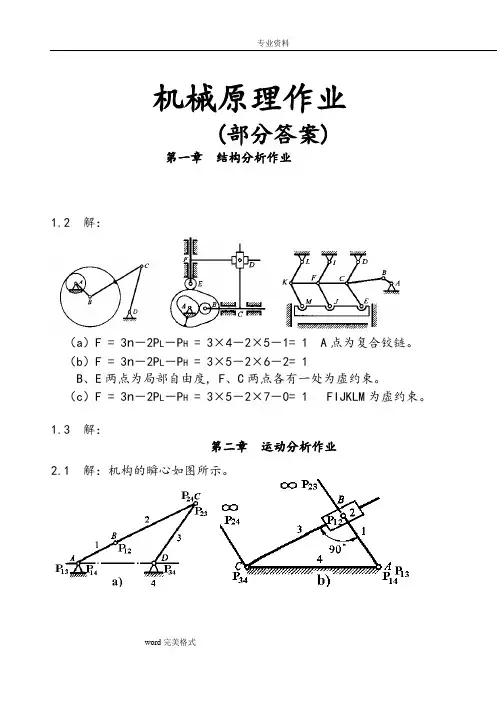
机械原理作业(部分答案)第一章结构分析作业1.2 解:(a)F = 3n-2P L-P H = 3×4-2×5-1= 1 A点为复合铰链。
(b)F = 3n-2P L-P H = 3×5-2×6-2= 1B、E两点为局部自由度, F、C两点各有一处为虚约束。
(c)F = 3n-2P L-P H = 3×5-2×7-0= 1 FIJKLM为虚约束。
1.3 解:第二章运动分析作业2.1 解:机构的瞬心如图所示。
2.2 解:取mmmm l /5=μ作机构位置图如下图所示。
1.求D 点的速度V D13P D V V =而 25241314==P P AE V V E D ,所以 s mm V V E D /14425241502524=⨯==2. 求ω1s rad l V AE E /25.11201501===ω3. 求ω2因 98382412141212==P P P P ωω ,所以s rad /46.0983825.1983812=⨯==ωω 4. 求C 点的速度V Csmm C P V l C /2.10154446.0242=⨯⨯=⨯⨯=μω2.3 解:取mmmm l /1=μ作机构位置图如下图a 所示。
1. 求B 2点的速度V B2V B2 =ω1×L AB =10×30= 300 mm/s 2.求B 3点的速度V B3V B3 = V B2 + V B3B2大小 ? ω1×L AB ? 方向 ⊥BC ⊥AB ∥BC 取mm s mm v /10=μ作速度多边形如下图b 所示,由图量得:mmpb 223= ,所以smm pb V v B /270102733=⨯=⨯=μ由图a 量得:BC=123 mm , 则mmBC l l BC 1231123=⨯=⨯=μ3. 求D 点和E 点的速度V D 、V E利用速度影像在速度多边形,过p 点作⊥CE ,过b 3点作⊥BE ,得到e 点;过e 点作⊥pb 3,得到d 点 , 由图量得:mmpd 15=,mmpe 17=,所以smm pd V v D /1501015=⨯=⨯=μ , smm pe V v E /1701017=⨯=⨯=μ;smm b b V v B B /17010173223=⨯=⨯=μ4. 求ω3s rad l V BC B /2.212327033===ω5. 求n B a 222212/30003010smm l a AB n B =⨯=⨯=ω6. 求3B aa B3 = a B3n + a B3t = a B2 + a B3B2k + a B3B2τ 大小 ω32L BC ? ω12L AB 2ω3V B3B2 ?方向 B →C ⊥BC B →A ⊥BC ∥BC 22233/5951232.2s mm l a BCn B =⨯=⨯=ω223323/11882702.222s mm V a B B k B B =⨯⨯=⨯=ω取mms mm a 2/50=μ作速度多边形如上图c 所示,由图量得:mmb 23'3=π ,mmb n 20'33=,所以233/11505023's mm b a a B =⨯=⨯=μπ2333/10005020's mm b n a at B =⨯=⨯=μ7. 求3α233/13.81231000s rad l a BC tB ===α8. 求D 点和E 点的加速度a D 、a E利用加速度影像在加速度多边形,作e b 3'π∆∽CBE ∆, 即 BE eb CE e CB b 33''==ππ,得到e 点;过e 点作⊥3'b π,得到d 点 , 由图量得:mm e 16=π,mmd 13=π,所以2/6505013s mm d a a D =⨯=⨯=μπ ,2/8005016s mm e a a E =⨯=⨯=μπ 。

机械原理课后全部习题解答文档编制序号:[KKIDT-LLE0828-LLETD298-POI08]《机械原理》习题解答机械工程学院目录第1章绪论 (1)第2章平面机构的结构分析 (3)第3章平面连杆机构 (8)第4章凸轮机构及其设计 (15)第5章齿轮机构 (19)第6章轮系及其设计 (26)第8章机械运动力学方程 (32)第9章平面机构的平衡 (39)第一章绪论一、补充题1、复习思考题1)、机器应具有什么特征机器通常由哪三部分组成各部分的功能是什么2)、机器与机构有什么异同点3)、什么叫构件什么叫零件什么叫通用零件和专用零件试各举二个实例。
4)、设计机器时应满足哪些基本要求试选取一台机器,分析设计时应满足的基本要求。
2、填空题1)、机器或机构,都是由组合而成的。
2)、机器或机构的之间,具有确定的相对运动。
3)、机器可以用来人的劳动,完成有用的。
4)、组成机构、并且相互间能作的物体,叫做构件。
5)、从运动的角度看,机构的主要功用在于运动或运动的形式。
6)、构件是机器的单元。
零件是机器的单元。
7)、机器的工作部分须完成机器的动作,且处于整个传动的。
8)、机器的传动部分是把原动部分的运动和功率传递给工作部分的。
9)、构件之间具有的相对运动,并能完成的机械功或实现能量转换的的组合,叫机器。
3、判断题1)、构件都是可动的。
()2)、机器的传动部分都是机构。
()3)、互相之间能作相对运动的物件是构件。
()4)、只从运动方面讲,机构是具有确定相对运动构件的组合。
()5)、机构的作用,只是传递或转换运动的形式。
()6)、机器是构件之间具有确定的相对运动,并能完成有用的机械功或实现能量转换的构件的组合。
()7)、机构中的主动件和被动件,都是构件。
()2 填空题答案1)、构件 2)、构件 3)、代替机械功 4)、相对运动 5)、传递转换6)、运动制造 7)、预定终端 8)、中间环节 9)、确定有用构件3判断题答案1)、√ 2)、√ 3)、√ 4)、√ 5)、× 6)、√ 7)、√第二章 机构的结构分析2-7 是试指出图2-26中直接接触的构件所构成的运动副的名称。
第二章2-1 何谓构件?何谓运动副及运动副元素?运动副是如何进行分类的?答:参考教材5~7页。
2-2 机构运动简图有何用处?它能表示出原机构哪些方面的特征?答:机构运动简图可以表示机构的组成和运动传递情况,可进行运动分析,也可用来进行动力分析。
2-3 机构具有确定运动的条件是什么?当机构的原动件数少于或多于机构的自由度时,机构的运动将发生什么情况?答:参考教材12~13页。
2-5 在计算平面机构的自由度时,应注意哪些事项?答:参考教材15~17页。
2-6 在图2-22所示的机构中,在铰链C、B、D处,被连接的两构件上连接点的轨迹都是重合的,那么能说该机构有三个虚约束吗?为什么?答:不能,因为在铰链C、B、D中任何一处,被连接的两构件上连接点的轨迹重合是由于其他两处的作用,所以只能算一处。
2-7 何谓机构的组成原理?何谓基本杆组?它具有什么特性?如何确定基本杆组的级别及机构的级别? 答:参考教材18~19页。
2-8 为何要对平面高副机构进行“高副低代"?“高副低代”应满足的条件是什么?答:参考教材20~21页。
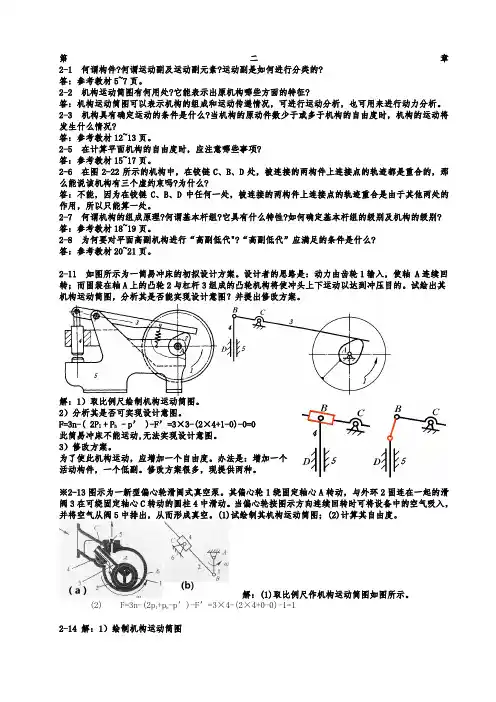
2-11 如图所示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮1输入,使轴 A连续回转;而固装在轴A上的凸轮2与杠杆3组成的凸轮机构将使冲头上下运动以达到冲压目的。
试绘出其机构运动简图,分析其是否能实现设计意图?并提出修改方案。
解:1)取比例尺绘制机构运动简图。
2)分析其是否可实现设计意图。
F=3n-( 2P l +P h –p’ )-F’=3×3-(2×4+1-0)-0=0此简易冲床不能运动,无法实现设计意图。
3)修改方案。
为了使此机构运动,应增加一个自由度。
办法是:增加一个活动构件,一个低副。
修改方案很多,现提供两种。
※2-13图示为一新型偏心轮滑阎式真空泵。
其偏心轮1绕固定轴心A转动,与外环2固连在一起的滑阀3在可绕固定轴心C转动的圆柱4中滑动。

第十章 齿轮机构及其设计习题10-21解:1) 因为7692.06550cos ===K b K r r α, 故压力角452439715.3900'''==K α展角:1375.06932.08307.0tan =-=-==K K K K inv αααθ曲率半径:mm r K b K 535.418307.050tan =⨯==αρ2) 087273.050==K θ,根据渐开线函数表,有 图10-21 ()25434087223.0087273.0087223.0087925.0455*******'''=---+'=K α mm r r K b K 860.6082155.050cos ===α习题10-23 解:分度圆半径:mm mz r 3923262=⨯== 齿顶圆半径:mm mh r r a a 42339*=+=+=基圆半径:mm r r b 648.3620cos 39cos 0=⨯==α 齿廓在齿顶处压力角:0241.2942648.36arccos arccos ===a b a r r α 齿廓在分度圆处曲率半径:mm r 339.1320sin 39sin 0=⨯==αρ齿廓在齿顶处曲率半径:mm tg tg r a b a 516.20241.29648.360=⨯==αρ习题10-25解:基圆节距mm L L p b 914.5512.27426.3356=-=-= 模数mm p m b 003.220cos 1415.3914.5cos 0=⨯==απ 取标准模数mm m 2=。
习题10-26解:中心距()()()5059157001221121112=+⨯=+=⇒+=i m a z mz i a大齿轮齿数:9055091122=⨯==z i z 小、大齿圆分度圆直径为 mm mz d 25055011=⨯==,mm mz d 45059022=⨯==小、大齿轮齿顶圆直径为()mm h z m d aa 2605522*11=⨯=+=,()mm h z m d a a 4605922*22=⨯=+= 小、大齿轮基圆直径为mm d d b 923.23420cos 250cos 01===α,mm d d b 862.42220cos 450cos 02===α 分度圆上齿厚及齿槽宽mm m p s e 854.72514159.322=⨯====π习题10-27 解:齿根圆直径与基圆直径重合时,有()**02220cos c h z m mz a --= 齿数为()46.41229397.015.220cos 122**0**=--=-=-+=c h z m c h z a a 当齿数大于41齿时,齿根圆直径大于基圆直径。
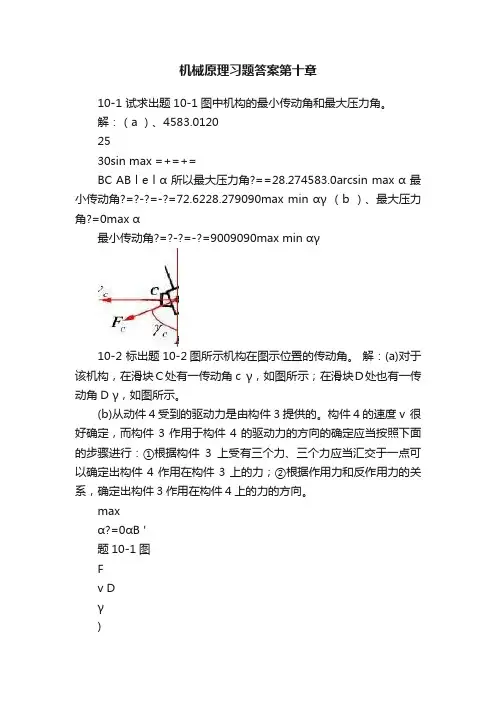
机械原理习题答案第十章10-1 试求出题10-1图中机构的最小传动角和最大压力角。
解:(a )、4583.01202530sin max =+=+=BC AB l e l α 所以最大压力角?==28.274583.0arcsin max α 最小传动角?=?-?=-?=72.6228.279090max min αγ (b )、最大压力角?=0max α最小传动角?=?-?=-?=9009090max min αγ10-2 标出题10-2图所示机构在图示位置的传动角。
解:(a)对于该机构,在滑块C处有一传动角c γ,如图所示;在滑块D处也有一传动角D γ,如图所示。
(b)从动件4受到的驱动力是由构件3提供的。
构件4的速度v 很好确定,而构件3作用于构件4的驱动力的方向的确定应当按照下面的步骤进行:①根据构件3上受有三个力、三个力应当汇交于一点可以确定出构件4作用在构件3上的力;②根据作用力和反作用力的关系,确定出构件3作用在构件4上的力的方向。
maxα?=0αB '题10-1图Fv Dγ)(a DF Dv图示机构在图示位置的传动角γ分别如图中所示。
10-5 标出题10-5图中各个凸轮机构在图示位置时的压力角。
凸轮为主动件。
解:图中各个凸轮机构在图示位置时的压力角α如图所示。
)(b nnn=0αααvv vnnnn α题10-5图10-6 在题10-6图中,凸轮为主动件,画出凸轮逆时针转过30o 时机构的压力角。
解:利用反转法,即将凸轮固定、机架和从动件沿与凸轮转向相反的方向运动,固定铰链点A 从点A “反转”到点A ’,从动件从AB 运动到A ’B ’,再由点B ’的速度方向和从动件的受力方向确定出凸轮逆时针转过30o时机构的压力角α,如图所示。
原教材6-8 在题6-8图中凸轮为半径为R 的圆盘,凸轮为主动件。
(1)写出机构的压力角α与凸轮转角之间的关系;(2)讨论如果][αα≥,应采用什么改进设计的措施?解:(1)、当凸轮转动任意角δ时,其压力角α如图所示。

机械原理课后全部习题答案目录第1章绪论 (1)第2章平面机构的结构分析 (3)第3章平面连杆机构 (8)第4章凸轮机构及其设计 (15)第5章齿轮机构 (19)第6章轮系及其设计 (26)第8章机械运动力学方程 (32)第9章平面机构的平衡 (39)第一章绪论一、补充题1、复习思考题1)、机器应具有什么特征?机器通常由哪三部分组成?各部分的功能是什么?2)、机器与机构有什么异同点?3)、什么叫构件?什么叫零件?什么叫通用零件和专用零件?试各举二个实例。
4)、设计机器时应满足哪些基本要求?试选取一台机器,分析设计时应满足的基本要求。
2、填空题1)、机器或机构,都是由组合而成的。
2)、机器或机构的之间,具有确定的相对运动。
3)、机器可以用来人的劳动,完成有用的。
4)、组成机构、并且相互间能作的物体,叫做构件。
5)、从运动的角度看,机构的主要功用在于运动或运动的形式。
6)、构件是机器的单元。
零件是机器的单元。
7)、机器的工作部分须完成机器的动作,且处于整个传动的。
8)、机器的传动部分是把原动部分的运动和功率传递给工作部分的。
9)、构件之间具有的相对运动,并能完成的机械功或实现能量转换的的组合,叫机器。
3、判断题1)、构件都是可动的。
()2)、机器的传动部分都是机构。
()3)、互相之间能作相对运动的物件是构件。
()4)、只从运动方面讲,机构是具有确定相对运动构件的组合。
()5)、机构的作用,只是传递或转换运动的形式。
()6)、机器是构件之间具有确定的相对运动,并能完成有用的机械功或实现能量转换的构件的组合。
()7)、机构中的主动件和被动件,都是构件。
()2 填空题答案1)、构件2)、构件3)、代替机械功4)、相对运动5)、传递转换6)、运动制造7)、预定终端8)、中间环节9)、确定有用构件3判断题答案1)、√2)、√3)、√4)、√5)、×6)、√7)、√第二章 机构的结构分析2-7 是试指出图2-26中直接接触的构件所构成的运动副的名称。
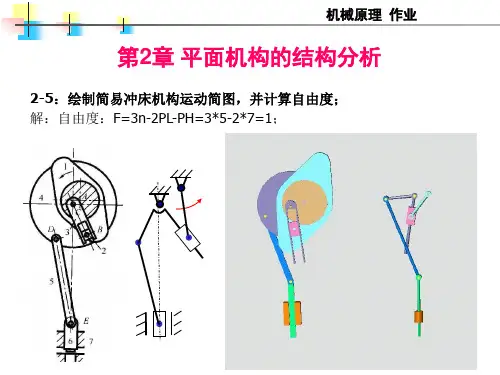
第一章机构的结构分析2-3.计算下列各机构的自由度。
注意分析其中的虚约束、局部自由度合复合铰链等。
题图1-4c所示机构,导路AD⊥AC、BC=CD/2=AB。
该机构可有多种实际用途,可用于椭圆仪,准确的直线轨迹产生器,或作为压缩机或机动马达等。
题图1-4d为一大功率液压动力机。
其中AB=A`B`,BC=B`C`,CD=C`D`,CE=C`E`,且E、E`处于滑块移动轴线的对称位置。
答c)为轨迹重合虚约束,可认为AB杆或滑块之一构成虚约束。
F=3×3-2×4=1;d)对称的上部分或下部分构成虚约束。
F=3×5-2×7=1.2-2.试计算下列机构的自由度,如有局部自由度、虚约束或复合铰链,请指出。
e)答案:a)F=3×7-2×10=1.注意其中的C、G、D、H点并不是复合铰链。
b)F=3×5-2×7=1C)F=3×7-2×10=1其中C点为复合铰链,分别由2、3、4构件在C点构成复合铰。
d)F=3×3-2×3-2=1或者F=3×5-2×5-2-2=1其中B、D处的滚子具有局部自由度。
(e) F=3×9-2×12-1-1=1或者:F=3×8-2×11-1=1(注意:BCD组成的三角形为一个构件)其中B点为局部自由度2-3试计算如图所示各平面高副机构的自由度,如有局部自由度、虚约束或复合铰链,请指出。
答:C点为局部自由度,E、F其中一点为虚约束。
F= 3×5-2×6-1-1=1或者:F=3×4-2×5-1=1第三章平面连杆机构及其分析与设计3-1.试求题图所示各机构在图示位置时全部瞬心的位置.答案:瞬心P 12在A 点 瞬心P 23、 P 24均在B 点 瞬心P 34在C 点 P 14、 P 13均在垂直导路的无 瞬心P 23、 P 13均在B 点 穷远处 瞬心P 14、 P 24均在D 点3-5在图示的齿轮-连杆组合机构中,试用瞬心法求齿轮1与齿轮3的传动比31/ωω。
WE CAN DO BETTER.质心位于1s ,1S B l =17.5mm ,连杆质量为 4.53572kg,质心位于2s ,2S B l =145.6mm,转速为200r/min ,滑块质量为2.267985kg ,设曲柄为水平位置为初始位置,题10-2图试计算:1) t=1s 时滑块的速度和加速度,并比较精确解与级数展开的近似解的计算结果; 2) t=1s 机构的总惯性力;3) 在曲柄相反的方向上,距A 为r 处(自行给定)进行离心惯性力平衡所需的质量; 4) 尝试用曲柄附加质量完全平衡滑块的水平惯性力和综合考虑水平和垂直惯性力过平衡方法,计算机构的惯性力,并与没有平衡的机构惯性力进行比较。
(1)转速为200r/min ,即(10/3)r/s ,所以t=1s 时曲柄与水平方向夹角为120°其中X-Y 为定坐标系,X ’-Y ’是动坐标系;V 为实际速度,Va 为滑块的铰接点在动坐标系下的速度,Vq 为牵连速度AC q d V ⋅=ωγcot ⋅=q V V︒=+60βα︒=+90βγBCAB l l ︒⋅=60sin sin β︒-⋅=60cos cos AC BC AC l l d β0.362052928得出V=2.202583BC an l V a 2'=136.3746462642γsin qa v v ==7.8962325366ACq l a ⋅=2ω158.8141850421q na a a -=βcos '0=16.80285881369 得出0a =16.80285881369 级数展开方法:根据滑块的位移公式:()()2sin 1cos ⎥⎦⎤⎢⎣⎡-+=t l l l t l x BC AB BC AB ωω将滑块的位移公式中的根式使用级数展开为2462462461()sin ()sin ()sin 2816AB AB AB BC BC BCl l l t t t l l l ωωω=-+-+⋅⋅⋅ 从第二项以后各项的值很小可忽略,误差不足1%,从而可以得出滑块位移的近似表达式222cos (1sin )2ABAB BC BC l x l t l t l ωω≈+-对上式求一阶微分得tl l t l v BCABAB ωωωω2sin 2sin 2⋅⋅-⋅⋅-≈=2.3228216031对上式求二阶微分得222cos cos 2ABc AB BCl a l t tl ωωωω≈--=45.1528403912 (2)其中AB F 是杆AB 的惯性力;q F BC 是杆BC 的牵连惯性力,t F BC 是BC 杆相对惯性力的切矢量,n F BC 是BC 杆相对惯性力的法矢量;C F 是C 滑块的惯性力。