第07讲频率法串联校正
- 格式:ppt
- 大小:869.00 KB
- 文档页数:15
利用频率响应法对控制系统进行串联校正一 实验目的1体会控制系统综合的目的,对比仿真前后系统特性的变化;2 掌握利用频率响应法进行串联校正的步骤和方法;3 熟悉matlab 软件使用方法,以及利用simulink 进行控制系统计算机辅助分析与设计的方法。
二 实验题目1 已知单位反馈控制系统的开环传递函数为用频率响应法对系统进行串联超前,试设计校正装置。
设计要求静态速度误差系数为>=10,相角裕度为>=45度。
2 已知单位反馈控制系统的受控对象传递函数为试对其进行串联校正,使之具有下列性能指标:斜坡误差系数1v s 40K -=,相角裕度︒>=γ35,截止频率不低于3rad/s 。
3 已知单位反馈控制系统的开环传递函数为试对其进行串联校正,使之具有下列性能指标:斜坡误差系数1v s 100K ->=,相角裕度︒>=γ45,截止频率不低于25rad/s 。
三 实验报告要求1 参照教科书例题6.3、6.4、6.5,完成以上三个系统的综合设计。
具体仿真设计过程要求如下:(1) 利用Matlab 绘制单纯进行开环增益调整后系统的开环Bode 图以及Nyquist 曲线,判定此时系统的稳定性,若稳定,并确定此时系统的相角裕度和截)1s 1.0)(1s 25.0(s 2)s (G p ++=)1s 2.0)(1s 1.0(s K )s (G o p ++=)1s 01.0)(1s 1.0(s K )s (G op ++=止频率。
(2)确定校正装置的结构和参数,其参数的计算可采用手工估算法加Simulink 仿真相结合的试凑法,也可通过Matlab编程来确定。
(3)绘制Simulink下系统的仿真结构图。
(4)绘制校正后系统的开环以及闭环Bode图,确定此时系统的开环、闭环频域指标;(5)绘制校正后系统的单位阶跃响应,并依图或通过Matlab软件计算确定该系统的暂态性能指标。
2报告格式要求(1)实验报告应包含实验题目、试验目的、实验器材、实验过程(方法)、实验结论六部分。


自动控制课程设计报告题目频率法串联超前校正院系机电工程系专业测控技术与仪器二零一二年十一月目录摘要 (3)1课程设计目的内容及要求................. 错误!未定义书签。
1.1设计目的 ......................... 错误!未定义书签。
1.2设计内容与要求.................... 错误!未定义书签。
1.3课程设计条件...................... 错误!未定义书签。
2系统设计步骤 .......................... 错误!未定义书签。
2.1系统计算 ......................... 错误!未定义书签。
2.2matlab程序运用.................... 错误!未定义书签。
2.3校正前系统bode图及分析........... 错误!未定义书签。
2.4一次校正后的bode图............... 错误!未定义书签。
2.5二次校正后的bode图分析........... 错误!未定义书签。
3小结 .................................. 错误!未定义书签。
参考文献................................ 错误!未定义书签。
摘要利用频率法串联超前校正,可以根据已知传递函数,分析系统是否稳定。
当一个或某些系统参数的变化时,确定闭环极点随参数变化的轨迹,进而研究闭环系统极点分布变化的规律。
应用matlab 仿真,只需进行简单计算就可得知系统一个或某些系统参数变化对闭环极点的影响趋势。
这种定性分析在研究系统性能和提出改善系统性能的合理途径方面具有重要意义。
【关键词】:闭环特征方程,根轨迹,零极点分布,mtlab 仿真一、设计目的:1、了解控制系统设计的一般方法、步骤。
2、掌握对系统进行稳定性分析、稳态误差分析以及动态特性分析的方法。
3、掌握利用MATLAB 对控制理论内容进行分析和研究的技能。

频率法设计串联超前校正河南科技大学课程设计说明书课程名称控制理论课程设计题目用频率法设计串联超前校正学院班级学生姓名指导教师时间控制理论课程设计任务书班级: 姓名: 学号:设计题目: 用频率法设计串联超前校正一、设计目的控制理论课程设计是综合性与实践性较强的教学环节。
其目的要进一步巩固自动控制理论知识,培养所学理论知识在实际中的应用能力;掌握自动控制系统分析、设计和校正的方法;掌握应用MATLAB 语言分析、设计和校正控制系统的方法;培养查阅图书资料的能力;培养使用MATLAB 语言软件应用的能力、培养书写技术报告的能力。
使学生初步掌握控制系统数字仿真的基本方法,同时学会利用MATLAB 语言进行控制系统仿真和辅助设计的基本技能,为今后从事控制系统研究工作打下较好的基础。
二、设计任务及要求应用时域法、频域法或根轨迹法设计校正系统,根据控制要求,制定合理的设计校正方案;编写相关MATLAB 程序,绘制校正前后系统相应图形,求出校正前后系统相关性能指标;比较校正前后系统的性能指标;编制设计说明书。
三、控制要求 设单位负反馈系统的开环传递函数为()(0.11)K G s s s =+,试用频率法设计串联超前校正装置,是系统的相对裕度°45γ≥,静态速度误差系数Kv=200,截止频率不低于15rad/s 。
四、设计时间安排查找相关资料(1天);编写相关MATLAB 程序,设计、确定校正环节、校正(2天);编写设计报告(1天);答辩修改(1天)。
五、主要参考文献[1] 胡寿松. 自动控制原理(第五版), 科学出版社.[2]黄永安,李文成等.Matlab7.0/Simulink6.0应用实例仿真与高效算法开发.北京:清华大学出版社,2008[3] 黄坚主. 自动控制原理及其应用. 北京:高等教育出版社 2004[4].黄忠霖,自动控制原理的MATLAB 实现,国防工业出版社.指导教师签字: 年 月 日摘要通过自动控制原理的学习,我们知道了分析系统的基本方法。
频率法串联超前校正一.实验目的1.了解和掌握二阶系统中的闭环和开环对数幅频特性和相频特性(波德图)的构造及绘制方法。
2.了解和掌握超前校正的原理,及超前校正网络的参数的计算。
3.熟练掌握使用本实验机的二阶系统开环对数幅频特性和相频特性的测试方法。
4.观察和分析系统未校正和串联超前校正后的开环对数幅频特性和相频特性,幅值穿越频率处ωc′,相位裕度γ,并与理论计算值作比对。
二.实验内容及步骤本实验用于观察和分析引入频域法串联超前校正网络后的二阶系统瞬态响应和稳定性。
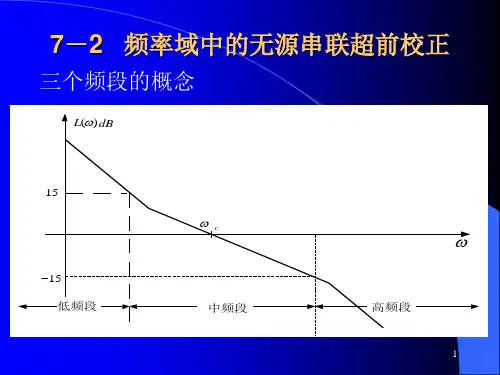
超前校正的原理是利用超前校正网络的相角超前特性,使中频段斜率由-40dB/dec变为-20dB/dec并占据较大的频率范围,从而使系统相角裕度增大,动态过程超调量下降;并使系统开环截止频率增大,从而使闭环系统带宽也增大,响应速度也加快.1.未校正系统的时域特性的测试未校正系统模拟电路图见图1。
本实验将函数发生器(B5)单元作为信号发生器,OUT输出施加于被测系统的输入端Ui,观察OUT从0V 阶跃+2.5V时被测系统的时域特性。
图1未校正系统模拟电路图未校正系统的开环传递函数为:0.3S)0.2S(16)S(G模拟电路的各环节参数:积分环节(A5单元)的积分时间常数Ti=R1*C1=0.2S,惯性环节(A6单元)的惯性时间常数T=R2*C2=0.3S,开环增益K=R2/R3=6。
实验步骤:注:‘S ST’用“短路套”短接!(1)将函数发生器(B5)单元的矩形波输出作为系统输入R。
(连续的正输出宽度足够大的阶跃信号)①在显示与功能选择(D1)单元中,通过波形选择按键选中‘矩形波’(矩形波指示灯亮)。
②量程选择开关S2置下档,调节“设定电位器1”,使之矩形波宽度≥3秒(D1单元左显示)。
③调节B5单元的“矩形波调幅”电位器使矩形波输出电压=2.5V(D1单元右显示)。
(1)构造模拟电路:按图3-3-2安置短路套及测孔联线,表如下。
(3)运行、观察、记录:A6(OUT)接CH1×1档,B5(OUT)接CH2×1档。