频率法校正
- 格式:ppt
- 大小:222.00 KB
- 文档页数:32


第六章1. 基本概念2. 两种常用校正装置3. 设计方法(1)频率法(2)根轨迹法(3)复合校正 6—1 校正的基本概念一、性能指标的提法:1.稳态误差:Ess 或v Kp Kz Kv 2.动态品质:(1) 时域指标:δ% ts (2)开环频域指标:Wc ν(3)闭环频域指标:Mr Wr 或Wb 如何改变性能的问题?1. 改变系统参数:增大开环传递函数K →ess ↓→h ↘v ↘→σ(改善很有限,且稳态与动态有些矛盾)2. 改变系统结构:增加辅助装置定义:利用增加辅助装置改变系统性能方法称为— 辅助装置包括:校正装置 、控制器、调节器二、校正方式:1. 串联校正:图P36 2. 反馈校正:图 3. 复合校正:(1)按给定输入的 图 目的:理论上可以做到:C (S )=R (S )即C (t )=R (t )(2)按扰动输入的 图 目的:理论上完全消除N (s )对输入影响Cr (s )=0工程上一般采用近似补偿 三、设计方法 (频域法) 1. 试探法(分析法)首先根据检验选定校正装置的基本形式→算出校正装置的参数→检验校正后的性能指标→是否符合; 如果符合则完成设计 ;否从新设计2.综合法(数学法)首先由要求的性能指标→画出希望的开环L(w)曲线→再与原系统的L (W )想比较→得到校正装置的Lc(w)→反写出校正装置的传函6—2常用的校正装置分类:讨论电的校正装置1。
无源校正装置(RC 网络)2。
有源校正装置(运放器)调节器一、无源超前校正装置(RC 网络 传函 伯德图) 电路:U2U1CR2R1传函:(复阻抗法)Gc(s)=1+Tas/a(1+Ts) a 衰减系数 T 时间常数必须补偿a 的衰减:把原K 增加a 倍或再串一个放大器(a 倍) 补偿后:aGc(s)=1+TaS/1+TS (a>1) 二、无源迟后校正装置 电路;6—3一、超前校正问题的提出 例:系统如图所示,要求1. 在单位斜坡输入下稳态误差ess<0.1;2. 开环剪切频率3. 相角裕度 幅值裕度问是否需要校正,怎样校正?解:首先进行稳态计算K=10可以满足稳态误差要求。
控制系统的校正(一)一、校正方式1、串联校正;2、反馈校正;3、对输入的前置校正;4、对干扰的前置校正。
二、校正设计的方法3.等效结构与等效传递函数方法主要是应用开环Bode 图。
基本做法是利用校正装置的Bode ,配合开环增益的调整,修改原系统的Bode 图,使得校正后的Bode 图符合性能指标的要求。
1.频率法2.根轨迹法利用校正装置的零、极点,使校正后的系统,根据闭环主导极点估算的时域性能指标满足要求。
将给定的结构(或传递函数)等效为已知的典型结构或典型的一、二阶系统,并进行对比分析,得出校正网络的参数。
三、串联校正1.超前校正(相位超前校正)2.滞后校正(相位滞后校正()111)(>++=a Ts aTss G c 超前校正装置的传递函数为L (ω)aT m 1=ω20lg G c (jωm )=10lg a 其中:11=tg ()()aT tg T ()−−−ϕωωω11sin 1m a a −−=+ϕ四、超前校正频率法超前校正频率法设计思路:利用超前校正装置提供的正相移,增大校正后系统的相稳定裕度。
因此,通常将校正后系统的截止频率取为:c m=ωω此时,超前装置提供的相移量为:11()sin 1m a a −−=+ϕω新的截止频率位于校正装置两个转折频率的几何中心,即:20lg ()10lg 0m G j a +=a T m 1=ω例1:单位负反馈系统的开环传递函数为)2()(+=s s Ks G 设计校正装置,使得系统的速度误差系数等于20,相稳定裕度。
45≥γ202)()(lim 0==⋅=→K s H s G s K s v 解K=40)15.0(20)(+=ωωωj j j G (1) 确定K 值调整增益后的开环频率特性为srad c /2.61=ω01004518)2.65.0(90180<=⨯−−=−tg γ11sin 1+−=−a a m ϕ(2) 计算原系统相稳定裕度14)(40211=+c c ωω截止频率满足1c ω计算相稳定裕度γ(3) 计算参数{ }a ()111)(>++=a Ts aTss G ca=3.26db 1.526.3lg 10=2020log() 5.12mm ωω=−⨯s rad m /5.8=ω5.81==a T m ω(4) 确定频率mω(5) 计算参数T 00015184511sin +−=+−−a a T =0.065011109.13421.0065.05.090)(−=+−−−=−−−c c c c tg tg tg ωωωωϕ加入校正装置后系统的开环传递函数为)1065.0)(15.0()121.0(20)()(+++=s s s s s G s G c (6) 验证001.45)(180=+=c ωϕγ满足性能指标要求。
0121111360618学号:题目基于频率法的超前校正设计学院专业班级姓名指导教师课程设计任务书学生姓名: 陈洁 专业班级: 自动化1101班指导教师: 谭思云 工作单位: 自动化学院题目:基于频率法的超前校正设计 初始条件:已知系统的传递函数模型为: )3.01)(1.01(2)(0s s s s G ++= 要求完成的主要任务: (包括课程设计工作量及其技术要求,以及说明书撰写等具体要求) 掌握采用频率法设计超前校正装置的具体步骤;设计超前校正环节,使其校正后系统的静态速度误差系数6≤v K ,相角裕度为︒50;1.采用Matlab 工具进行分析设计,并绘制校正前后系统的单位阶跃响应曲线,开环Bode 图和Nyquist 图;2.分析比较采用校正前后的Bode 图和Nyquist 图,说明其对系统的各项性能指标的影响。
总结频率法校的优缺点及其适应条件;3.对上述任务写出完整的课程设计说明书,说明书中必须写清楚分析计算的过程,并包含Matlab 源程序或Simulink 仿真模型,说明书的格式按照教务处标准书写。
时间安排:(1)课程设计任务书的布置,讲解 (一天)(2)根据任务书的要求进行设计构思。
(一天)(3)熟悉MATLAB 中的相关工具(一天)(4)系统设计与仿真分析。
(四天)(5)撰写说明书。
(两天)(6)课程设计答辩(一天)指导教师签名: 年 月 日系主任(或责任教师)签名: 年 月 日目录摘要 (1)Abstract (1)1控制系统超前校正的任务 (2)2控制系统校正前分析 (3)2.1用MATLAB做出校正前系统的伯德图、奈奎斯特图和阶跃响应曲线 (3)2.1.1系统的开环传递函数 (3)2.1.2校正前系统的波德图 (3)2.1.3校正前系统的奈奎斯特图 (4)2.1.4校正前系统的单位阶跃响应曲线 (5)3控制系统超前校正分析设计 (6)3.1串联超前校正原理分析 (6)3.2采用MATLAB工具进行串联超前校正设计 (7)3.2.1利用MATLAB进行超前校正设计的程序 (7)3.2.2开环频率特性系数扩大即K值的确定 (9)3.2.3利用MATLAB工具设计超前校正结果 (11)3.3理论计算 (13)4控制系统校正前后的对比 (15)4.1控制系统校正前后的伯德图、奈奎斯特图和阶跃响应曲线对比 (15)4.1.1系统校正前后伯德图与奈奎斯特图对比 (15)4.1.2系统校正前后单位阶跃曲线对比及分析 (17)5频率法校正优缺点及适用条件 (18)5.1频率法超前校正的优缺点及适用条件 (18)5.1.1频率法超前校正的优缺点: (18)5.1.2频率法超前校正的适用条件: (18)5.2频率法校正的其他情况 (18)5.3频率法校正的优缺点及适用条件 (19)6心得体会 (20)7参考文献 (21)摘要自动控制理论是研究自动控制共同规律的技术科学。
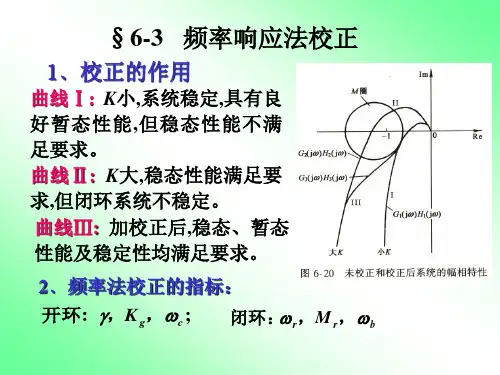
根轨迹法和频率响应法校正根轨迹法和频率响应法是两种常用的控制系统校正方法。
这篇文章将围绕这两种方法进行阐述。
首先,我们来介绍根轨迹法。
根轨迹法是一种基于根轨迹的控制系统校正方法。
它通过绘制开环传递函数的根轨迹图来设计合适的控制器。
开环传递函数是未加上控制器后的传递函数,根轨迹图则反映了系统闭环极点的变化情况。
根据根轨迹图,我们可以确定控制器的增益和相位来实现系统的稳定和响应速度的要求。
接下来,让我们介绍频率响应法。
频率响应法是一种基于系统的频率响应特性来设计控制器的方法。
它通常使用幅频特性曲线和相频特性曲线来描述系统的频率响应特性。
在幅频特性曲线上,我们可以看到系统对不同频率输入的响应幅值,从而可以根据需求来设计合适的增益。
而在相频特性曲线上,我们可以看到系统对不同频率输入的相位差,从而可以根据需求来设计合适的相位。
以上是根轨迹法和频率响应法的简要介绍。
接下来,让我们来分析它们的优缺点和适用场景。
首先,根轨迹法适用于线性系统和单输入单输出变量的情况。
这种方法可以提供极点位置信息,而且具有直观性和易于理解的特点。
缺点是需要在整个频率范围内进行分析并找到关键频率点,需要较高的数学功底和计算能力。
其次,频率响应法适用于多变量系统和非线性系统的情况。
这种方法可以提供系统的幅度和相位特性,而且可以在局部频率范围内进行分析。
缺点是对系统的稳态误差和非线性特性无法进行考虑,需要对系统进行模型化。
在实际应用中,我们可以根据系统的特性来选择合适的方法。
如果系统较为简单且线性,可以选择根轨迹法;如果系统较为复杂或存在非线性特性,可以选择频率响应法。
当然,也可以将两种方法结合使用,以获取更好的校正效果。
总之,根轨迹法和频率响应法是两种常用的控制系统校正方法。
了解它们的优缺点和适用场景有助于我们在实际应用中做出合适的决策。
晶振振荡频率校正方法
1.调整电容分量:校准晶振频率的一种简单方法是通过调整
电容分量来实现。
晶振通常由一个谐振回路组成,包括晶体、
电感和电容。
通过增加或减少电容的值,可以改变晶振的频率。
可以通过更换电容或添加并联或串联电容来实现频率校正。
2.调整晶体附近的电路:晶振频率还可以通过调整晶体附近
的电路来进行校正。
晶振周围的电路包括负载电容、终端电阻、滤波电路等。
通过调整这些电路的参数,可以对晶振的频率进
行微调。
3.温度补偿:晶振频率会受到温度的影响,因此温度补偿也
是一种常见的频率校正方法。
通过在晶振电路中添加温度传感器,并根据温度变化对晶振频率进行自动校正,可以提高晶振
的稳定性和准确性。
4.预调电路:预调电路是一种通过调整晶振电路中的电路参
数来实现频率校正的方法。
该电路会对晶振的频率进行粗略调整,通过监测晶振输出的频率,再进行微调,以达到所需的频率。
5.软件校正:对于一些数字电路,可以通过在程序中进行软
件校正来调整晶振频率。
通过微调时钟的频率和相位,可以达
到对晶振频率进行校正的目的。
实验八基于MATLAB控制系统的频率法串联超前校正设计一、实验目的1、对给定系统设计满足频域性能指标的串联校正装置。
2、掌握频率法串联有源和无源超前校正网络的设计方法。
3、掌握串联校正环节对系统稳定性及过渡过程的影响。
二、实验原理用频率法对系统进行超前校正的基本原理,是利用超前校正网络的相位超前特性来增大系统的相位裕量,以达到改善系统瞬态响应的目标。
为此,要求校正网络最大的相位超前角出现在系统的截止频率(剪切频率)处。
串联超前校正的特点:主要对未校正系统中频段进行校正,使校正后中频段幅值的斜率为-20dB/dec,且有足够大的相位裕度;超前校正会使系统瞬态响应的速度变快,校正后系统的截止频率增大。
这表明校正后,系统的频带变宽,瞬态响应速度变快,相当于微分效应;但系统抗高频噪声的能力变差。
1、用频率法对系统进行串联超前校正的一般步骤为:1)根据稳态误差的要求,确定开环增益K。
2)根据所确定的开环增益K,画出未校正系统的波特图,计算未校正系统的相位裕度。
3)计算超前网络参数a和T。
4)确定校正网络的转折频率。
5)画出校正后系统的波特图,验证已校正系统的相位裕度。
6)将原有开环增益增加倍,补偿超前网络产生的幅值衰减,确定校正网络组件的参数。
三、实验内容1、频率法有源超前校正装置设计例1、已知单位负反馈系统被控制对象的传递函数为:试用频率法设计串联有源超前校正装置,使系统的相位裕度 ,静态速度误差系数 。
clc; clear;delta=2; s=tf('s');G=1000/(s*(0.1*s+1)*(0.001*s+1));margin(G) 原系统bode 图[gm,pm]=margin(G) phim1=50;phim=phim1-pm+delta; phim=phim*pi/180;alfa=(1+sin(phim))/(1-sin(phim)); a=10*log10(alfa); [mag,phase,w]=bode(G); adB=20*log10(mag); Wm=spline(adB,w,-a); t=1/(Wm*sqrt(alfa)); Gc=(1+alfa*t*s)/(1+t*s); [gmc,pmc]=margin(G*Gc) figure;margin(G*Gc) 矫正后bode figure(1);step(feedback(G,1)) 矫正后01 figure(2);step(feedback(G*Gc,1)) 矫正后02结果显示: gm = 1.0100 pm =0()(0.11)(0.0011)K G s s s s =++045γ≥11000v K s -=0.0584gmc =7.3983pmc =45.7404分析:根据校正前后阶跃响应的曲线可知:校正后的系统满足动态性能指标以及频域性能指标。