第五章+约束优化计算方法
- 格式:ppt
- 大小:1.23 MB
- 文档页数:78
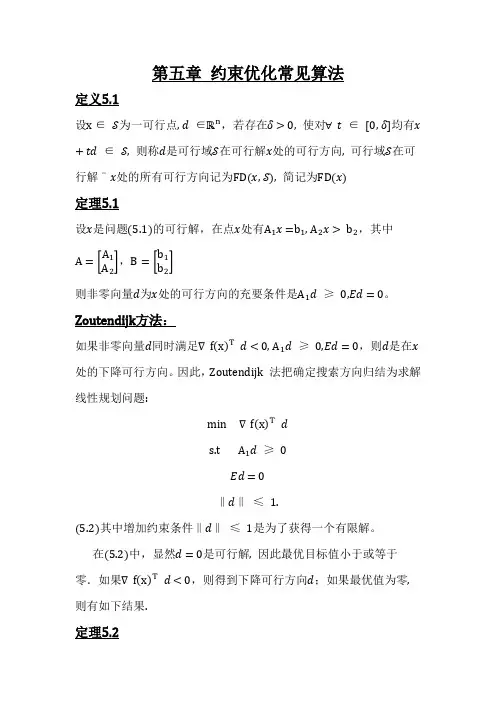
第五章约束优化常见算法定义5.1设∈为一可行点, ∈,若存在 > 0, 使对∀∈[0, ]均有+ ∈, 则称是可行域在可行解处的可行方向, 可行域在可行解ˉ处的所有可行方向记为FD(, ), 简记为FD()定理5.1设是问题(5.1)的可行解,在点处有 =, > ,其中,则非零向量为处的可行方向的充要条件是≥0, = 0。
Zoutendijk方法:如果非零向量同时满足∇ < 0,≥0, = 0,则是在处的下降可行方向。
因此,Zoutendijk 法把确定搜索方向归结为求解线性规划问题:min ∇s.t ≥0= 0‖‖≤1.(5.2)其中增加约束条件‖‖≤1是为了获得一个有限解。
在(5.2)中,显然 = 0是可行解, 因此最优目标值小于或等于零.如果∇ < 0,则得到下降可行方向;如果最优值为零, 则有如下结果.定理5.2考虑问题(5.1),设是可行解,在点处有 = , > ,其中,则为Kuhn-Tucker点的充要条件是问题(5.2)的最优目标值为零。
Rosen投影梯度法定义5.2设为阶矩阵,若 =且= ,则称为投影矩阵。
定理5.3设是问题(5.1)的可行解,在点处,有1 = 1,2 > 2,其中,又设为行满秩矩阵,则 = −是一个投影矩阵, 且若∇()0,则 = − ∇()是下降可行方向.定理5.4设是问题(5.1)的一个可行解, ,,的定义同定理5.3, 且为行满秩矩阵,令= ∇() =其中和分别对应于和. 若 ∇() = 0,则1 如果≥0,那么是K-T点;2 如果中含有负分量,不妨设< 0,这时从1中去掉对应的行,得到,令,= −∇()那么为下降可行方向。
梯度投影法计算步骤1.给定给定初始可行点, 置 = 1。
2.在点处,将和分别分解成,和,, 使得 = ,> .3.令如果是空的,令 = (单位矩阵), 否则令 = −.4.令= − ∇ (). 若()0, 则转步6; 若() = 0,则进行步5.若是空的,则停止计算,得到;否则,令= ∇ () =如果≥0,则停止计算,为K-T点;如果中包含负分量,则选择一个负分量,比如,修正,去掉中对应的行,返回步3。

牛顿法求解约束优化算法流程牛顿法在求解约束优化问题的时候呢,那可是有一套自己的独特办法的。
咱们先得知道啥是约束优化呀,简单说呢,就是在一定的限制条件下,去找到一个函数的最优值。
就好像你去超市买东西,预算有限制,这个预算就是约束条件,你想买到最划算的东西组合,这个最划算就是最优值啦。
牛顿法求解这个约束优化的第一步呀,得确定目标函数和约束条件。
这就像是你要去旅行,你得先确定你的目的地(目标函数),还有你的旅行规则(约束条件),比如说你只有三天假期(这就是个约束条件),你想去的地方得在这个时间内能够玩得过来。
这个目标函数和约束条件的确定可是很关键的呢,要是弄错了,那就像你走错了路,很难到达正确的地方啦。
接下来呀,要构造拉格朗日函数。
这个拉格朗日函数就像是一个魔法工具,它把目标函数和约束条件结合在了一起。
你可以把它想象成是一个超级厨师,把不同的食材(目标函数和约束条件)混合在一起,做出一道特别的菜(拉格朗日函数)。
这个函数的构造也是有讲究的,不能随便乱来哦。
然后呢,我们要计算拉格朗日函数的梯度和海森矩阵。
这两个东西呀,就像是这个魔法函数的密码一样。
梯度就像是一个指引方向的小箭头,告诉你往哪个方向走可能会找到最优值。
海森矩阵呢,就更神奇了,它能告诉你这个方向的“路况”是怎么样的,是平坦的还是崎岖的,是上坡还是下坡。
计算这两个东西有时候可能会有点麻烦,就像你解一道很难的数学题,要特别细心才行。
再之后呢,就是要通过牛顿法的迭代公式来更新变量啦。
这个迭代就像是你在爬山,你一步一步地朝着山顶(最优值)走去。
每一步你都根据前面计算出来的梯度和海森矩阵来调整自己的脚步方向和大小。
这个过程可能会需要很多次的迭代,就像你爬山可能要走好多步才能到达山顶一样。
有时候你可能会走偏一点,但是不要担心,只要按照这个迭代公式一步一步来,总会越来越接近最优值的。
在这个迭代的过程中呀,我们还得时刻检查约束条件。
就像你爬山的时候,不能走出规定的路线(约束条件)。