电缆隧道故障检测多足机器人的应用
- 格式:pdf
- 大小:248.75 KB
- 文档页数:2

电缆沟道巡检机器人在现代社会,电力供应的稳定与安全至关重要。
电缆作为电力传输的重要载体,其运行状况直接影响着电力系统的可靠性。
为了确保电缆的正常运行,及时发现潜在的故障和隐患,电缆沟道巡检工作成为了电力维护的关键环节之一。
传统的人工巡检方式不仅效率低下,而且存在一定的安全风险。
随着科技的不断进步,电缆沟道巡检机器人应运而生,为电力行业带来了全新的解决方案。
电缆沟道通常位于地下,环境复杂且狭窄,充满了各种潜在的危险因素。
例如,潮湿的环境可能导致电缆绝缘性能下降,积水可能引发短路,还有可能存在有害气体威胁巡检人员的健康。
此外,电缆沟道内的空间有限,人工巡检时行动不便,难以对每一处细节进行全面、准确的检查。
电缆沟道巡检机器人的出现有效地解决了这些问题。
它具备小巧灵活的机身设计,能够在狭窄的沟道内自由穿梭。
机器人身上配备了多种先进的传感器和检测设备,如高清摄像头、红外热成像仪、气体检测仪等。
这些设备能够实时采集电缆沟道内的图像、温度、湿度、气体浓度等信息,并将其传输回控制中心。
高清摄像头可以清晰地拍摄电缆的外观,检查是否存在破损、老化、腐蚀等情况。
红外热成像仪则能够检测电缆的温度分布,通过温度异常来发现潜在的过热故障。
气体检测仪能够监测沟道内有害气体的浓度,保障巡检过程中的安全。
在巡检过程中,机器人能够按照预设的路线自主行走,也可以根据实际情况进行智能避障。
其行走机构通常采用履带式或轮式设计,具备良好的通过性和稳定性。
机器人的动力来源一般为电池,为了保证足够的续航能力,一些先进的型号还具备自动充电功能。
电缆沟道巡检机器人的控制系统是其核心部分。
控制中心的工作人员可以通过远程操作界面实时监控机器人的工作状态,接收和分析采集到的数据。
当发现异常情况时,控制系统能够及时发出警报,并提供准确的位置信息,以便维修人员迅速进行处理。
除了硬件设备和控制系统,软件算法也在电缆沟道巡检机器人的工作中发挥着重要作用。
例如,图像识别算法可以对拍摄到的电缆图像进行自动分析,识别出潜在的故障特征。

巡检机器人在隧道运营中的应用摘要:本文针对当前高速公路隧道维护大多采用人工巡检结合视频监控、火灾检测、事件检测的自动检测系统存在巡检效率低、运营成本高的问题,阐述了高速公路隧道巡检机器人在高速公路中运营中的应用,重点梳理隧道巡检机器人的关键技术方案和应用情况,提出了巡检机器人在交通隧道应用面临的技术问题和解决思路,展望了隧道巡检机器人在交通隧道运营安全方面的应用前景。
关键词:巡检机器人;隧道;隧道运营;智能巡检随着高速公路隧道里程和车流量的增加,隧道设备设施种类也逐渐增多,这给隧道日常维护和管理带来较大压力。
目前隧道的运行巡检和维护主要以人工为主,存在耗时长、效率低、易漏检、检测结果的准确性受限于巡检人员的技术水平等问题,导致隧道管理者难以快速做出准确的判断。
另外,近年来多地发生隧道特大事故,更加凸显隧道维护自动检测系统的重要性。
本文结合高速公路隧道的实际运行情况,就隧道病害检测技术,结合国内外当前对该方向的研究工作,介绍巡检机器人在隧道运营检测中的应用情况,并对未来的发展趋势和方向进行综述。
1 高速公路隧道巡检机器人简介高速公路隧道巡检机器人有别于高速公路智能巡逻机器人,其是专门针对隧道的复杂情况设计的一款巡检机器人。
该机器人主要对隧道内设有的交通诱导、交通环检、环境检测、通风照明、火灾报警等设备进行巡视监测。
针对交通隧道的非结构化环境特点,巡检机器人基本采用轨道式机器人设计。
常见的机器人巡检系统主要由机器人本体、轨道式机器人总成、供电平台、通信平台和远程控制终端组成,其中机器人本体包含视觉云台系统、控制系统和行走机构等部分。
工作人员能够实时管理及控制机器人在线进行巡检任务作业。
供电平台为机器人提供电力,巡检机器人在行走机构的作用下,在轨道上自由运动;本体上安装有视觉相机,可实时对环境和设备进行检测,经过数据处理后,再通过机器人与远程终端之间的网络部署(机器人通过无线客户端接入隧道区域 AP,与上位机通讯),将机器人巡检画面实时传送到工作人员操作的控制终端上,实现远程对机器人的动态进行监控管理。

高压电缆隧道(综合管廊)机器人应用经验汇报材料随着城市建筑的高层化、城市市容、环境保护及特殊安全的要求,越来越多的城市中心区域采用地下电缆供电来代替架空输电线路的供电方式,而为了提高地下资源合理利用率,近年来,采用综合管廊和电缆隧道的方式敷设电缆的情况层出不穷,这也给运维人员保障电缆安全运行提出了更高的要求。
一、应用背景(一)设备情况国网温州供电公司目前管辖高压电缆线路长度382.6公里,其中在运的电缆隧道及综合管廊有4座,七都隧道、上田隧道、瓯江北口隧道及龙江路综合管廊,总长度8.3公里。
每座电缆隧道在建设阶段都安装了电缆隧道智能机器人。
表1 电缆隧道(综合管廊)现状(二)电网需求国网公司已经明确了“具有中国特色国际领先的能源互联网企业”的战略目标,而构建能源互联网业务智能化应用体系也成为了主要任务之一,因此电缆隧道及综合管廊的智能化运维要求也促使我们加快配置机器人,提高隧道智能巡检水平。
地下隧道和综合管廊内存在易积水、易产生有害气体、空气不易流通、散热较慢等问题,对日常巡检提出了更高要求,也增加了人工巡检的危险性。
为了减少人员处在有限空间的作业时间,实现安全生产目标,利用机器人开展巡视任务成为保障人身安全的有效手段。
二、应用情况(一)配置要求1.电缆隧道及综合管廊运行环境一是环境潮湿。
四个隧道顶部都有存在不同程度的凝露甚至水现象,在机器人长期放置的充电房需要尤其注意对湿度的控制二是坡度较大。
部分电力隧道坡度达到30°以上,对机器人设备的动力要求需要更高。
三是里程需求。
由于隧道普遍超过2公里,结合电池电量,可以通过增设充电站的方式提高机器人的巡视范围。
同时,长距离通讯对于通讯信号的覆盖强度和信号稳定性提出了较高要求。
四是空间限制。
电力隧道内可用于监测机器人监测时行走空间不大,在隧道建设阶段应该率先让各设备厂家及时做好空间布局与相互沟通,避免机器人轨道建设与土建、附属设备冲突。
2.专业化巡检要求一是携带的在线式红外测温仪,提高巡检专业化水平;二是增加环境监测单元,实时掌握环境状况;三是具备自主巡视能力,提高巡检效率。

机器人技术在电路维修中的应用随着科技的不断进步,机器人技术在各行各业的应用越来越广泛。
其中,在电路维修领域,机器人技术的应用也开始逐渐展现出其独特的优势。
本文将探讨机器人技术在电路维修中的应用,并分析其带来的益处。
一、机器人技术在电路维修中的介绍在电路维修工作中,机器人技术可以用于各个环节,包括故障诊断、电路检测、元件更换等。
通过机器人的精确控制和先进的传感器技术,可以实现高效、准确的电路维修。
二、机器人技术在电路故障诊断中的应用1. 自动检测:机器人可以通过搭载传感器和相机等设备,对电路进行全面自动检测。
它可以快速检测故障所在,并输出诊断结果,极大地提高了工作效率。
2. 数据分析:机器人可以将收集到的电路信号数据进行分析和处理。
它可以根据预设的程序和算法,判断故障原因,并给出修复方案,运用机器学习等技术,不断提高准确率和处理速度。
三、机器人技术在电路检测中的应用1. 自动巡检:机器人可以在设备布置好的电路间自主巡视,检测电路是否存在潜在故障。
它能够检测到部分隐藏问题,如短路、接触不良等,并及时记录并上报。
2. 精确测量:机器人配备高精度传感器,可以对电路中的参数进行实时测量,如电压、电流、电阻等。
通过机器人的测量,可以准确判断电路是否正常工作,提前发现异常情况。
四、机器人技术在电路维修中的应用1. 元件更换:机器人可以根据故障诊断结果,自动进行元件更换。
它可以利用机械臂等装置,精确拆卸原有元件,并安装新的元件。
这不仅提高了操作的准确度,也节约了人力成本和时间。
2. 电焊和连接:机器人具有高精度的焊接技术,能够在电路维修中进行焊接和连接工作。
它可以完成复杂的焊接任务,并保证焊接质量。
这对于复杂电路的维修来说,是一项重要的技术支持。
五、机器人技术在电路维修中的益处1. 提高效率:机器人可以24小时全天候工作,不需要休息和停机,能够大大提高电路维修的效率和工作速度。
2. 降低危险:电路维修往往需要接触高压设备和化学品,存在一定的安全风险。
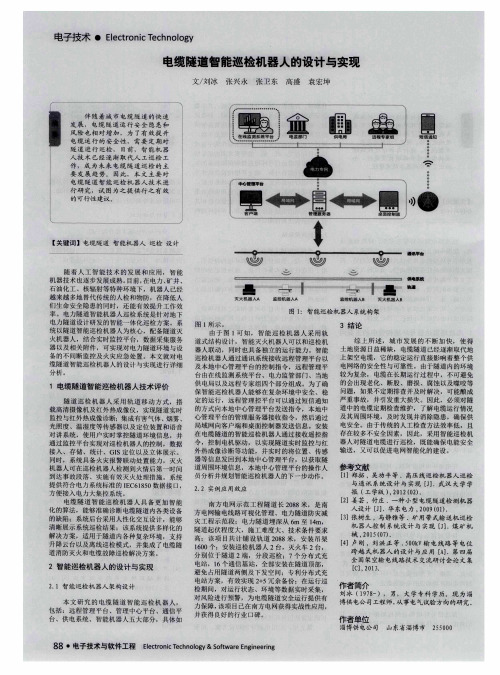
电缆隧道智能巡检机器人的设计与实现作者:刘冰来源:《电子技术与软件工程》2017年第06期伴随着城市电缆隧道的快速发展,电缆隧道运行安全隐患和风险也相对增加,为了有效提升电缆运行的安全性,需要定期对隧道进行巡检,目前,智能机器人技术已经逐渐取代人工巡检工作,成为未来电缆隧道巡检的主要发展趋势。
因此,本文主要对电缆隧道智能巡检机器人技术进行研究,试图为之提供行之有效的可行性建议。
【关键词】电缆隧道智能机器人巡检设计随着人工智能技术的发展和应用,智能机器技术也逐步发展成熟。
目前,在电力、矿井、石油化工、核辐射等特种环境下,机器人已经越来越多地替代传统的人检和物防,在降低人们生命安全隐患的同时,还能有效提升工作效率。
电力隧道智能机器人巡检系统是针对地下电力隧道设计研发的智能一体化巡检方案。
系统以隧道智能巡检机器人为核心,配备隧道灭火机器人,结合实时监控平台,数据采集服务器以及相关附件,可实现对电力隧道环境与设备的不间断监控及火灾应急处置。
本文就对电缆隧道智能巡检机器人的设计与实现进行详细分析。
1 电缆隧道智能巡检机器人技术评价隧道巡检机器人采用轨道移动方式,搭载高清摄像机及红外热成像仪,实现隧道实时监控与红外热成像诊断;集成有害气体、烟雾、光照度、温湿度等传感器以及定位装置和语音对讲系统,使用户实时掌控隧道环境信息,并通过监控平台实现对巡检机器人的控制,数据接入、存储、统计、GIS定位以及立体展示。
同时,系统具备火灾报警联动处置能力,灭火机器人可在巡检机器人检测到火情后第一时间到达事故段落、实施有效灭火处理措施。
系统提供符合电力系统标准的IEC61850数据接口,方便接入电力大集控系统。
电缆隧道智能巡检机器人具备更加智能化的算法,能够准确诊断电缆隧道内各类设备的缺陷;系统后台采用人性化交互设计,能够清晰展示系统巡检结果;该系统提供多样化的解决方案,适用于隧道内各种复杂环境,支持升降云台以及离线巡检模式,并集成了电缆隧道消防灭火和电缆故障巡检解决方案。
电缆隧道智能巡检机器人在电网智能化中的应用研究李乾,钱恒健,方永毅,邢昆,刘保安(国网石家庄供电公司,石家庄050000)摘要:随着我国现代化城市的不断建设,城市电缆隧道的建设也越来越多,电缆的巡检工作也越来越繁重和复杂,对于人员的安全隐患也显露出来。
因此,开发电缆巡检机器人代替人工巡检模式已经成为电网智能化建设的需求。
文章从机器人的研究难点出发,详细介绍了其研究方案。
关键词:电网;智能化;电缆;巡检;机器人;应用中图分类号:TM75;TP242文献标识码:A文章编号:1001-5922(2021)01-0085-05 Research on the Application of Intelligent Inspection Robot for Cable Tunnel in Power Grid IntelligenceLi Qian,Qian Hengjian,Fang Yongyi,Xing Kun,Liu Baoan(State Grid Shijiazhuang Power Supply Company,Shijiazhuang050000,China)Abstract:With the continuous construction of modern cities in China,the construction of urban cable tunnels is more and more,the inspection work of cables is more and more heavy and complex,and the potential safety hazards for personnel are also revealed.Therefore,the development of cable inspection robot instead of artificial inspection mode has become the demand of intelligent construction of power grid.Starting from the research difficulties of ro⁃bot,this paper introduces its research scheme in detail.Key words:power grid;intelligence;cable;patrol inspection;robot;application0引言为了提高城市电缆管网的现代化管理水平、有效地减轻巡检人员的工作强度、避免电缆事故的发生,电缆隧道智能巡检机器人的研究与应用迫在眉睫。
电力隧道环境中的智能巡检机器人发展现状摘要:电力隧道内部环境恶劣,电磁环境复杂,空气中含有大量可燃气体,湿度高,可能有动物入侵。
这些问题都有可能对隧道内的设备造成损坏,因此对隧道内的设备进行监控显得尤为重要。
隧道内照明差、噪声高、通信稳定性差,对隧道内设备设施进行监控存在诸多困难。
随着各种监测技术的发展,人工监测方法取得了很大的进步,但仍存在检测范围小、通信可靠性差、人工分析速度慢、反馈不及时等问题。
关键词:电力隧道环境;智能巡检;机器人;发展现状一、智能巡检机器人面临的主要问题1.关键技术问题智能检测机器人的智能控制系统是最复杂、要求最高的关键技术问题。
由于检测环境的恶劣和复杂,智能控制系统是整个检测工作的重要技术支撑。
例如,当道路上有水或道路上有障碍物时,机器人可以通过视觉捕捉识别环境,选择绕道或使用爬障机构越过障碍物。
定位技术和自主导航技术在巡检工作中也非常重要。
目前的导航技术主要包括GPS导航、激光导航和视觉导航。
目前,视觉导航技术得到了广泛的应用,它可以在精度和广度上快速获取相关信息。
此外,一些智能巡检机器人还具有语言识别技术、防撞防护技术和检测功能,在操作中进行技术操作。
2.功能与审美问题功能:现有的巡检机器人功能比较简单,在复杂环境下的巡检工作较差。
现有大多数机器人的外形设计过于简单,直接影响其功能和操作。
特别是外部传感器应该安装在机器人的末端,所以机器人的形状会直接影响传感器的功能。
美学方面:早期智能巡检机器人的重点一直是技术研发,而我国的智能巡检机器人在外观和造型上缺乏美感和视觉舒适度。
目前,我国的三种主要类型的检测机器人往往是简单的几何外壳覆盖内部结构,外观死板,缺乏活动性,不合理的颜色搭配也导致用户对机器人的误解。
3.人机关系处理问题合理的人机关系可以让工作人员工作更加高效、快捷、舒适。
其问题主要在于用户和机器人功能之间的使用关系,用户和信息传递之间的交互关系,以及用户与智能巡检机器人、环境之间的关系。
基于多传感器信息融合的电缆隧道巡检机器人开发摘要:针对于目前电力电缆隧道巡检人工检测智能化程度低、检测效率差等问题设计开发了一套电缆隧道巡检机器人系统。
综合传感技术、仪器仪表、远程通讯和计算机辅助检测等相关技术建立了系统的总体方案,分析了基于多传感器信息融合技术的机器人系统特性,建立了系统仿真模型,证明了该机器人设计方案的可行性。
关键词:电缆隧道巡检机器人,多传感器信息融合,超声测距,避障中图分类号:u45 文献标识码:a 文章编号:1引言目前,对于电力电缆隧道的巡检大多数采取人工操作,不但智能化程度低,检测精度差,而且隧道内环境恶劣,存在积水、空气质量差等情况,严重危害操作人员的健康。
随着对电缆隧道的巡检自动化需求越来越紧迫,建立一套精确、高效、智能的电缆隧道巡检机器人系统势在必行。
本文应用传感技术、仪器仪表、远程通讯和计算机辅助检测等相关技术建立了电缆隧道巡检机器人系统,基于多传感器融合技术,保证了系统的强适应性和可靠性。
2 机器人总体方案设计2.1系统总体框架设计本机器人巡检系统是在充分考虑了电力电缆隧道巡检的实际工作情况下进行开发设计的,集控制技术、传感技术、通讯技术、测试技术、数字信号处理技术、计算机技术等于一体,总体系统框架如图1所示。
图1 总体系统框架设计考虑到应用环境对系统抗震性和稳定性的较高要求,采用pc104和内部canopen通信网络的总线框架。
上层使用嵌入式单板电脑,使用can总线扩展卡连接伺服控制/驱动模块控制并驱动各电机,使用多传感器融合板采集各传感器信息,通过视频服务器进行视频数据传输。
2.2通讯系统设计机器人与远程监控系统之间的外部通讯,通过与远程监控系统组成局域网络,采用tcp ip/rtp协议进行数据通信;主控cpu与其它功能节点之间的内部通讯,采用can总线通讯方式。
由于机器人在隧道内移动工作,隧道环境对无线信号屏蔽现象严重,因此采用辐射型漏泄同轴电缆,实现隧道内无线信号的全程覆盖,同时可以有效的保证通信质量,实现多种基于无线网络的应用。
- 21 -高 新 技 术4 结论足部角度特征相对于其他关节角度特征具有不容易被遮挡的优势,左右足形成的脚摆角更包含丰富的变化信息,因此,足部特征的研究对步态识别技术中特征的提取具有重要意义。
通过Codamotion 三维动作捕捉系统平台对20名受试者的足部空间脚摆角,及其在3个面上的投影角度的变化规律,进行个人特征自身稳定性分析和不同人特征角度曲线之间的差异性分析,得出具备个人识别的基础条件,通过这4个特征能够进行个人识别。
通过基于弗雷歇距离的曲线相似度研究,确定这4个特征可以用于个人识别,个人识别率达到91.14%。
因此,在今后的步态识别研究中,可以考虑加强对足部特征的研究。
参考文献[1]袁鹏瑞.基于多轮廓特征融合的步态识别方法研究[D].陕西:西安科技大学,2018.[2]李一波,卑珊珊,刘婉竹,等.基于行走时脚摆角的步态识别方法[J].计算机工程,2012,38(14):132-134.随着机器人技术的飞速发展,机器人已经越来越多地替代传统的人检和物防工作,在减少人们的生命安全隐患的同时,还能有效提升工作效率。
机器人在电力行业中的应用越来越普遍,自20世纪80年代以来,许多城市逐渐采用地下电缆隧道取代传统的架空线路方式,因而使用电缆隧道巡检机器人将大大节省电力公司的人力、物力和财力,更重要的是,它可以大大减少电缆隧道的恶劣环境对检测人员的伤害。
美国是最早研制出电缆隧道检测机器人的国家。
2005年,华盛顿大学的Bing Jiang 开发了一套名为Rangers 的地下电缆检测机器人[1]。
机器人两端装有2个12 V 直流齿轮电机,采用单平台多节模块设计,因而具有稳定的转向能力。
此外,由于采用多分段结构,机器人可以携带更多的传感器。
机器人平台分为2个部分,分别用于机器人的控制和传感器的数据处理。
该机器人长1.2 m,可沿直径4 cm~8 cm 的电缆行走,跨越沿途遇到的障碍物,沿电缆爬行并识别故障位置[2-3]。
电缆隧道故障检测多足机器人的应用
发表时间:2020-01-08T15:32:53.753Z 来源:《科技新时代》2019年11期作者:云帮助1 常布荣2 孙大伟3 张盛昱4 宋立辉5
[导读] 研究一种电缆隧道(小型沟道)多足机器人故障检测系统,研发机器人可携带的轻量化集成传感器对电缆本体及通道进行缺陷检测,运维人员在地面进行操作及监控;通过呼和浩特供电局的应用实践证明了本研究的适应性和可靠性。
云帮助1 常布荣2 孙大伟3 张盛昱4 宋立辉5
(内蒙古电力(集团)有限责任公司呼和浩特供电局内蒙古自治区呼和浩特市 010050)
摘要:研究一种电缆隧道(小型沟道)多足机器人故障检测系统,研发机器人可携带的轻量化集成传感器对电缆本体及通道进行缺陷检测,运维人员在地面进行操作及监控;通过呼和浩特供电局的应用实践证明了本研究的适应性和可靠性。
0引言
目前随着城市化和电力线路入地工程的展开,电缆隧道(沟道)运维方式已经很难满足配网线路的需求,靠人力巡检巡视不能够解决电缆本体及通道的故障检测问题,尤其是小型化的电缆沟道,狭小的空间运维人员很难顺利进入,根本无法正常巡检巡视,随着电缆故障的不断增加,急需要需求新的技术手段解决目前遇到的难点问题。
呼和浩特供电局目前基本是早期的小型化沟道,经常出现塌方、积水、有毒有害气体等,给电缆沟道的运维造成了难题,现有的手段已经无法满足运维要求。
经过技术查新及调研,我们提出了小型化、便携式多足机器人巡检系统的应用,由机器人代替运维人员进入电缆沟道,对电缆本体及通道进行环境检测、电缆故障及缺陷检测,为小型化的电缆沟道巡检巡视和故障检测提供了一种全新的手段。
1多足机器人系统的设计
经过对呼和浩特供电局电缆沟道现场调研,设计方案只有多足架构的机器人能够满足狭小电缆沟道的复杂运行情况,在跨越障碍物、涉水等方面需求,采用六足设计,每足三关节设计,每个关节2个自由度;最大爬行速度不小于1m/s,最大涉水深度小于25cm,最大连续运行时间不小于4hr。
本研究采用了多频率融合技术,自建无费用、宽带、适应电缆隧道环境,目前已经研发成熟,投入呼和浩特供电局实际使用运行。
设定传输距离不小于300米,双向传输速率大于800Mbps,可以满足不同的应用场景的需求;
本研究的优势是不用附加设备即可监测,通过视频定位技术,可直接检测电缆蠕动数据,及时发现超出阈值情况,为电缆健康稳定运行提供新的技术手段;
2地面控制站系统研发
安装在机器人上面的前端摄像机/红外热成像仪等智能化传感器通过无线通信模块,把视频及语音信号传输给路由器装置,路由器经过桥接,转换为智能终端可以使用的无线热点,多台计算机或者智能终端可同时监控现场情况,也可以通过远程模块传输至远端进行监控等。
3电缆本体及通道状态及缺陷检测方法
研究一种电缆隧道机器人视频下的动态电缆蠕动的测量算法,本方法能够准确提取每一帧图像中的缓慢运动形变中电缆特征点,并根据计算机视觉的相关理论,较高精度的计算出时间与位移差的关系。
本方法对摄相头的安装角度没有特殊的要求,本方法简单、易行、且有较高的准确度及实用价值。
通过标幺化算法统一多参数数值,创建电缆状态监测多参数关联分析模型,通过权的设置和推理机,直接给出状态检修的相关结论,解决了在线监测系统长期以来的单个参数或者系统与综合监测的问题、监测参数与如何及时分析使用问题等,对于电缆线路的安全稳定运行具有十分重要的意义。
及时发现火灾隐患并且进行激光精确测距故障点定位,为事故处理及抢修赢得时间,为供电可靠性的提高提供技术手段。
3应用情况
经过设计加工,装配调试,从功能使用角度实现了电缆及通道的机器人检测,运维人员可以在地面遥控机器人在电缆沟道进行巡检,整机装置考虑其使用环境的多变性,系统对其设备的功耗、防水、集成检测头等都做了适应性处理(见图4~5)。
图4 样机测试--跨越障碍
目前,此系统已应用于呼和浩特供电局的电缆沟道内的检测,对沟道进口非常狭小、环境差、气味大、地面滑、人员无法行走;沟道内地面有障碍物、桥架坍塌,内部积水,都可进行爬行巡检巡视。
效果良好。
4结论
通过现场应用,本研究有效解决了电缆隧道日常巡检及紧急状态下的监控等技术难题。
实现了预期目标,一是常规巡检,研制的机器人系统代替人进入隧道进行巡检,及时发现事故隐患;二是事故初始状态,利用机器人集成的激光测距,准确定位出火灾点或者破坏点位置;三是携带专业仪器设备提前发现事故隐患,处理于萌芽状态: 电缆隧道机器人可携带专业设备进行逐一巡查,不会漏掉一个点,全程可
视频连接\红外热成像视频、录制存储、激光测距,便于事后办公室逐一检查比对,提前发现事故隐患。
参考文献:
【1】姜媛媛, 李振璧, 梁喆. 煤矿井下电缆隧道超温预警与故障定位系统[J]. 煤矿安全, 2009, v.40;No.v.40(9):80-82. 【2】牛永超, 郭伟, 查富生. 基于CPG理论的六足机器人多足协调运动控制方法[J]. 制造业自动化, 2008, 30(11):56-59. 【3】高兴强. 高压电缆及电缆隧道综合监控系统研究与应用[J]. 2016(23):105-105.
【4】李胜国. 电力电缆及其管沟在线综合监控系统的研究[D]. 山东大学.。