第七章 Simulink建模和仿真
- 格式:ppt
- 大小:1.18 MB
- 文档页数:127
simulink建模与仿真流程我们需要在Simulink中创建一个新的模型。
打开Simulink软件后,选择“File”菜单中的“New”选项,然后选择“Model”来创建一个新的模型。
接着,我们可以在模型中添加各种组件,如信号源、传感器、执行器等,以及各种数学运算、逻辑运算和控制算法等。
在建模过程中,我们需要定义模型的输入和输出。
在Simulink中,可以使用信号源模块来定义模型的输入信号,如阶跃信号、正弦信号等。
而模型的输出信号可以通过添加显示模块来实现,如示波器模块、作用域模块等。
接下来,我们需要配置模型的参数。
在Simulink中,可以通过双击组件来打开其参数设置对话框,然后根据需求进行参数配置。
例如,对于控制系统模型,我们可以设置控制器的增益、采样时间等参数。
完成模型的配置后,我们可以进行仿真运行。
在Simulink中,可以选择“Simulation”菜单中的“Run”选项来运行仿真。
在仿真过程中,Simulink会根据模型的输入和参数进行计算,并生成相应的输出结果。
我们可以通过示波器模块来实时显示模型的输出信号,以便进行结果分析和调试。
在仿真过程中,我们可以通过修改模型的参数来进行参数调优。
例如,可以改变控制器的增益值,然后重新运行仿真,观察输出结果的变化。
通过不断调整参数,我们可以优化模型的性能,使其达到设计要求。
除了单一模型的仿真,Simulink还支持多模型的联合仿真。
通过将多个模型进行连接,可以实现系统级的仿真。
例如,我们可以将控制系统模型和物理系统模型进行连接,以实现对整个控制系统的仿真。
在仿真完成后,我们可以对仿真结果进行分析和评估。
Simulink提供了丰富的分析工具,如频谱分析、时域分析和稳定性分析等。
通过对仿真结果的分析,我们可以评估模型的性能,并进行进一步的改进和优化。
Simulink建模与仿真流程包括创建模型、添加组件、定义输入输出、配置参数、运行仿真、参数调优、联合仿真和结果分析等步骤。


如何使用MATLABSimulink进行动态系统建模与仿真如何使用MATLAB Simulink进行动态系统建模与仿真一、引言MATLAB Simulink是一款强大的动态系统建模和仿真工具,广泛应用于各个领域的工程设计和研究中。
本文将介绍如何使用MATLAB Simulink进行动态系统建模与仿真的方法和步骤。
二、系统建模1. 模型构建在MATLAB Simulink中,可以通过拖拽模块的方式来构建系统模型。
首先,将系统的元件和子系统模块从库中拖拽到模型窗口中,然后连接这些模块,形成一个完整的系统模型。
2. 参数设置对于系统模型的各个组件,可以设置对应的参数和初始条件。
通过双击模块可以打开参数设置对话框,可以设置参数的数值、初始条件以及其他相关属性。
3. 信号连接在模型中,各个模块之间可以通过信号连接来传递信息。
在拖拽模块连接的同时,可以进行信号的名称设置,以便于后续仿真结果的分析和显示。
三、系统仿真1. 仿真参数设置在进行系统仿真之前,需要设置仿真的起止时间、步长等参数。
通过点击仿真器界面上的参数设置按钮,可以进行相关参数的设置。
2. 仿真运行在设置好仿真参数后,可以点击仿真器界面上的运行按钮来开始仿真过程。
仿真器将根据设置的参数对系统模型进行仿真计算,并输出仿真结果。
3. 仿真结果分析仿真结束后,可以通过查看仿真器界面上的仿真结果来分析系统的动态特性。
Simulink提供了丰富的结果显示和分析工具,可以对仿真结果进行绘图、数据处理等操作,以便于对系统模型的性能进行评估。
四、参数优化与系统设计1. 参数优化方法MATLAB Simulink还提供了多种参数优化算法,可以通过这些算法对系统模型进行优化。
可以通过设置优化目标和参数范围,以及定义参数约束条件等,来进行参数优化计算。
2. 系统设计方法Simulink还支持用于控制系统、信号处理系统和通信系统等领域的特定设计工具。
通过这些工具,可以对系统模型进行控制器设计、滤波器设计等操作,以满足系统性能要求。

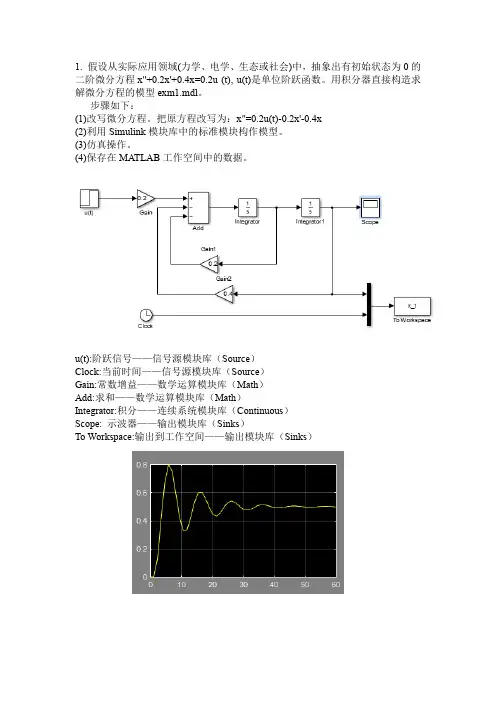
1. 假设从实际应用领域(力学、电学、生态或社会)中,抽象出有初始状态为0的二阶微分方程x"+0.2x'+0.4x=0.2u (t), u(t)是单位阶跃函数。
用积分器直接构造求解微分方程的模型exm1.mdl。
步骤如下:(1)改写微分方程。
把原方程改写为:x"=0.2u(t)-0.2x'-0.4x(2)利用Simulink模块库中的标准模块构作模型。
(3)仿真操作。
(4)保存在MATLAB工作空间中的数据。
u(t):阶跃信号——信号源模块库(Source)Clock:当前时间——信号源模块库(Source)Gain:常数增益——数学运算模块库(Math)Add:求和——数学运算模块库(Math)Integrator:积分——连续系统模块库(Continuous)Scope:示波器——输出模块库(Sinks)To Workspace:输出到工作空间——输出模块库(Sinks)2. 建立二阶系统222)(n n nS S S G ωςωω++=的脉冲响应模型,设ωn=10Hz ,观察当0<ζ<1、ζ=0、ζ=1及ζ>1时系统的响应。
Pulse Generator :脉冲发生器——信号源模块库(Source )Transfer Fun :传递函数——连续系统模块库(Continuous )Scope :示波器——输出模块库(Sinks )ζ=0.2 ζ=0ζ=1 ζ=53.皮球以15米/秒的速度从10米高的地方落下,建立显示球弹跳轨迹的模型。
Gravity:常数——信号源模块库(Source)IC Elasticity:信号的初始值——信号与系统模块库(Signal&Systems)Gain:常数增益——数学运算模块库(Math)Velocity:积分——连续系统模块库(Continuous)Position:有上下边界的有限积分——连续系统模块库(Continuous)Scope:示波器——输出模块库(Sinks)4. 利用使能原理构成一个正弦半波整流器。
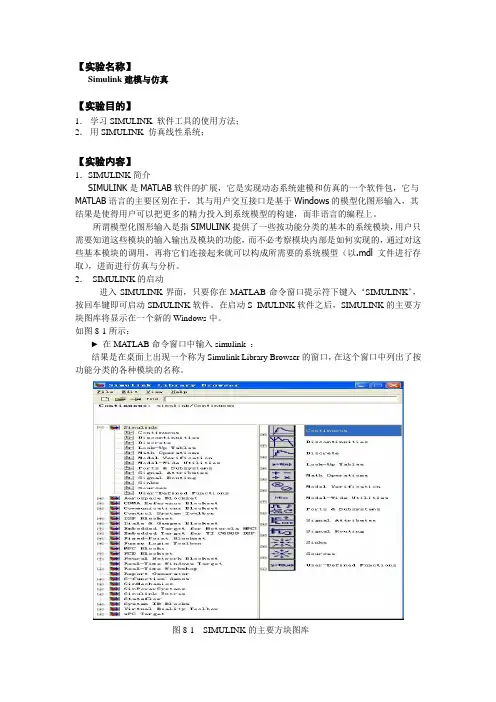
【实验名称】Simulink建模与仿真【实验目的】1.学习SIMULINK 软件工具的使用方法;2.用SIMULINK 仿真线性系统;【实验内容】1.SIMULINK简介SIMULINK是MATLAB软件的扩展,它是实现动态系统建模和仿真的一个软件包,它与MATLAB语言的主要区别在于,其与用户交互接口是基于Windows的模型化图形输入,其结果是使得用户可以把更多的精力投入到系统模型的构建,而非语言的编程上。
所谓模型化图形输入是指SIMULINK提供了一些按功能分类的基本的系统模块,用户只需要知道这些模块的输入输出及模块的功能,而不必考察模块内部是如何实现的,通过对这些基本模块的调用,再将它们连接起来就可以构成所需要的系统模型(以.mdl文件进行存取),进而进行仿真与分析。
2.SIMULINK的启动进入SIMULINK界面,只要你在MA TLAB命令窗口提示符下键入‘SIMULINK’,按回车键即可启动SIMULINK软件。
在启动S IMULINK软件之后,SIMULINK的主要方块图库将显示在一个新的Windows中。
如图8-1所示:►在MA TLAB命令窗口中输入simulink :结果是在桌面上出现一个称为Simulink Library Browser的窗口,在这个窗口中列出了按功能分类的各种模块的名称。
图8-1 SIMULINK的主要方块图库3.SIMULINK的模块库介绍►SIMILINK模块库按功能进行分为以下8类子库:Continuous(连续模块)Discrete(离散模块)Function&Tables(函数和平台模块)Math(数学模块)Nonlinear(非线性模块)Signals&Systems(信号和系统模块)Sinks(接收器模块)Sources(输入源模块)4.SIMULINK简单模型的建立(1)建立模型窗口(2)将功能模块由模块库窗口复制到模型窗口(3)对模块进行连接,从而构成需要的系统模型5.SIMULINK功能模块的处理(1)模块库中的模块可以直接用鼠标进行拖曳(选中模块,按住鼠标左键不放)而放到模型窗口中进行处理。
simulink建模及动态仿真的一些实验步骤Simulink是MATLAB中的一种可视化仿真工具,可以用于动态系统建模、仿真和分析。
以下是一些Simulink建模及动态仿真的实验步骤:启动Simulink:首先,需要打开MATLAB,然后在MATLAB 的命令窗口中输入“simulink”命令,或者点击工具栏中的Simulink 图标来启动Simulink。
新建模型:在Simulink的启动界面中,可以选择“Blank Model”来新建一个空白的模型。
也可以选择其他预设的模型模板来开始建模。
构建系统模型:在新建的模型窗口中,可以通过从Simulink 的模块库中拖拽模块到模型窗口中来构建系统模型。
模块库中包含了各种类型的模块,如源模块、接收模块、处理模块等。
将这些模块按照系统的结构和功能连接起来,形成一个完整的系统模型。
设置模块参数:对于模型中的每个模块,都可以双击打开其参数设置对话框,设置其参数和初始条件。
这些参数和初始条件将决定模块在仿真中的行为。
设置仿真参数:在模型窗口的工具栏中,可以点击“Simulation”->“Model Configuration Parameters”来打开仿真参数设置对话框。
在这个对话框中,可以设置仿真的起始和结束时间、仿真步长、求解器类型等参数。
开始仿真:完成以上步骤后,可以点击模型窗口工具栏中的“Run”按钮来开始仿真。
在仿真过程中,可以实时观察模型中各个模块的状态和输出。
分析结果:仿真结束后,可以使用Simulink提供的各种分析工具来分析仿真结果。
例如,可以使用示波器模块来显示仿真过程中某个模块的输出波形,也可以使用MATLAB的工作空间来查看和处理仿真数据。
以上步骤是一个基本的Simulink建模和动态仿真的过程。
在实际使用中,可能还需要根据具体的需求和系统特点进行一些额外的设置和调整。
《Simulink建模与仿真》§2.11、>> A=[1 2 3;4 5 6]A = 1 2 34 5 62、>> B=[1 2 3]B = 1 2 33、>> C=[4;5;6]C =4564、>> A(2,3)ans =6(说明:ans是answer的缩写,默认的输出符号)5、MATLAB中分号(;)的作用有两点:一是作为矩阵或向量的分行符,二是作为矩阵或向量的输出开关控制符。
即如果输入矩阵或向量后键入分号,则矩阵与向量不在MATLAB命令窗中显示,否别将在命令窗口中显示。
6、冒号操作符(:)的应用。
冒号操作符在建立矩阵的索引与引用时非常方便且直接。
如上述对多维矩阵F的建立中,冒号操作符表示对矩阵F第一维与第二维所有元素按照其顺序进行引用,从而对F进行快速赋值,无需一一赋值。
如>> B=2:5 %对向量进行赋值;B = 2 3 4 5>> B(1:3)=2 %向量B从第2个到第3个元素全部赋值为2B = 2 2 2 5>> C=6:-2:0 %将向量C放行递减赋值.初始值为6,终止位为0,步长为一2C = 6 4 2 07、冒号的使用很灵活:§2.2 矩阵单元的基本运算1、矩阵的加减法>>a=[1 2 3;4 5 6]a =1 2 34 5 6>> b=[0 2 1;2 5 3]b =0 2 12 5 3>> c=a+bc =1 4 46 10 9>> d=a-bd =1 0 22 0 3矩阵与标量的加法与减法是指标量本身与矩阵所有元素进行相应运算,如若B=1,则>> e=a+Be =2 3 45 6 72、矩阵的乘方与除法>>a =1 2 34 5 6>> b=[1 2;0 3;2 1]b =1 20 32 1>> c=a*bc =7 1116 29在Matlab中,矩阵除法有两种形式,即左除(\)和右除(/)。