轴类零件形位公差的确定
- 格式:doc
- 大小:102.50 KB
- 文档页数:8
轴类零件形位公差的确定在数控机床上检测形位公差并⾃动校正⼯件的⽅法【摘要】本⽂介绍了在数控机床上⽤寻边器丈量⼯件尺⼨及形位公差,同时快速设定⼯件零点的⽅法。
它的成功应⽤不仅为众多的中⼩企业充分利⽤数控机床的先进功能、节约购置专⽤检测设备的投进提供了经验,同时为⼀些特殊及相似零件的编程加⼯及检测打开了思路。
FANUC和SINUMERIK数控系统是当今应⽤范围最⼴泛的两类数控系统,固然在操纵⽅式上有所差异,但其基本⽅法是⼀致的,以下分别做出说明。
【关键词】形位公差寻边器检测LILi_li(SJ Petroleum Machinery Co. Sinopec Corp. Jingzhou Hubei, 434024, China)【Keywords】tolerance of form and position ; detecting ; the edge finder引⾔数控机床和三坐标丈量机均是机电⼀体化的⾃动化机械,数控机床是将被加⼯对象进⾏数字化处理,然后利⽤数字信息进⾏控制,从⽽加⼯出合格产品。
⽽三坐标丈量机则是在已加⼯好的产品上,利⽤测头与⼯件型⾯接触测得⼀系列点的坐标值,进⽽计算出尺⼨、形位误差值的丈量设备,数控机床与三坐标丈量机均是利⽤坐标轴的移动实现⾃⾝功能。
基于这⼀共同点,该⽅法在不改变数控机床CNC控制系统的条件下 ,将数控机床原有的功能加以扩展,通过宏程序实现在数控机床上丈量⼯件尺⼨及形位公差等多项功能。
1 硬件部分寻边器上测头的基本功能是触发和瞄准。
测头分为机械式、光电式、电⽓式三种。
测头性能的好坏,决定着丈量⽅式的难易、丈量精度的⾼低。
这次选⽤我国⽣产的应⽤极为⼴泛的硬线连接光电式测头,它属于接触式测头,为通⽤型球头测头,直径6毫⽶,能测定⾼度、槽宽、孔径和轮廓外形等。
2 软件部分2.1 SIEMENS系统中的宏程序;%_N_WORKPIECE ZERO AUTO SET_MPF (主程序名);$PATH=/_N_MPF_DIRIF R20<=0 GOTOF _LIF R20>4 GOTOF ERRORAAA:R20=R20CASE R20 OF 1 GOTOF _A 2 GOTOF _AA 3 GOTOF _B 4 GOTOF _BB DEFAULT GOTOF _E _A: R[R20]=$AA_IM[X]记录当前X轴机床坐标系的值,其结果保存在变量R1中MSG("RECORD R" <提⽰⽤户X轴⽅向的R1点坐标已经记录,按下复位键R20=R20+1M0_AA: R[R20]=$AA_IM[X]记录当前X轴机床坐标系的值,结果保存在变量R2中MSG("RECORD R" <提⽰⽤户Y轴⽅向的R3点坐标已经记录,按下复位键R20=R20+1M0_BB: R[R20]=$AA_IM[Y]记录当前Y轴机床坐标系中的值, 其结果保存在变量R4中MSG("RECORD R"<在控制⾯板上显⽰出⼯件的直径(长度、宽度尺⼨)M0GOTOF END_L: R20=1GOTOB AAAERROR: MSG(“ FIRST ENTER PART NUMBER 0 OR 1 TO &R20”) ;提⽰⽤户修改变量R20的值,⾸先将数值0或1填进变量R20中。
机械零件设计中形位公差的合理选择形位公差是评定机械零件的一项重要的技术经济指标。
在机械零件的设计过程中正确地选择形位公差项目以及合理地确定形位公差数值,对提高产品的质量和降低制造成本,具有十分重要的意义。
标签:机械零件;设计;形位公差;合理选择1.引言零件在加工过程中不仅有尺寸误差,同时由于机床精度、加工方法等多种原因,使得零件的加工表面、轴线对称中心平面等的实际形状和位置相对于设计所要求的理想形状和位置,也不可避免地存在着误差,我们称它为形状和位置误差(简称形位误差)。
形位误差对机械产品的制造、机械零部件的使用和工作性能的影响不容忽视。
为保证机械产品的质量和零件的互换性,在对零件的尺寸误差加以控制的同时,必须对形位误差也加以控制,规定合理的形位公差,才能真正的保证产品质量。
2.形位公差项目的选择2.1根据零件的几何特征来考虑。
零件的几何特征不同,会产生不同的形位误差。
例如:回转类(轴类、套类)零件中的阶梯轴,它的轮廓要素是圆柱面、端面、中心要素是轴线。
圆柱面选择圆柱度是理想项目,因为它能综合控制径向的圆度误差、轴向的直线度误差和素线的平行度误差。
也可选用圆度和素线的平行度。
从项目特征看,同轴度主要用于轴线,是为了限制轴线的偏离。
跳动能综合限制要素的形状和跳动公差。
其他诸如平面零件,选用平面度项目,槽类零件选用对称度项目,均基于零件存在不同的几何特征的原因。
2.2根据零件的功能要求来考虑。
机器对零件不同功能的要求,决定零件需选用不同的形位公差项目。
若阶梯轴两轴承位置明确要求限制轴线问的偏差,应采用同轴度。
但如果阶梯轴对形位精度有要求,而无需区分轴线的位置误差与圆柱面的形状误差,则可选择跳动项目。
其他诸如箱体类零件,轴承孔轴线之间平行度的要求都是基于保证运动件之间的正常啮合,提高承载能力的性能要求而确定的,给定结合面的平面度要求是为保证平面的良好密封性。
2.3从方便检测来考虑。
在满足功能要求的前提下,为了方便检测,应该选用测量简便的项目代替难于测量的项目,有时可将所需的公差项目用控制效果相同或相近的公差项目来代替。
机械零件标注与公差标准规定1.轴套类零件这类零件一般有轴、衬套等零件,在视图表达时,只要画出一个基本视图再加上适当的断面图和尺寸标注,就可以把它的主要形状特征以及局部结构表达出来了。
为了便于加工时看图,轴线一般按水平放置进行投影,最好选择轴线为侧垂线的位置。
在标注轴套类零件的尺寸时,常以它的轴线作为径向尺寸基准。
由此注出图中所示的Ф14 、Ф11(见A-A断面)等。
这样就把设计上的要求和加工时的工艺基准(轴类零件在车床上加工时,两端用顶针顶住轴的中心孔)统一起来了。
而长度方向的基准常选用重要的端面、接触面(轴肩)或加工面等。
如图中所示的表面粗糙度为Ra6.3的右轴肩,被选为长度方向的主要尺寸基准,由此注出13、28、1.5和26.5等尺寸;再以右轴端为长度方向的辅助基,从而标注出轴的总长96。
2.盘盖类零件这类零件的基本形状是扁平的盘状,一般有端盖、阀盖、齿轮等零件,它们的主要结构大体上有回转体,通常还带有各种形状的凸缘、均布的圆孔和肋等局部结构。
在视图选择时,一般选择过对称面或回转轴线的剖视图作主视图,同时还需增加适当的其它视图(如左视图、右视图或俯视图)把零件的外形和均布结构表达出来。
如图中所示就增加了一个左视图,以表达带圆角的方形凸缘和四个均布的通孔。
在标注盘盖类零件的尺寸时,通常选用通过轴孔的轴线作为径向尺寸基准,长度方向的主要尺寸基准常选用重要的端面。
3.叉架类零件这类零件一般有拨叉、连杆、支座等零件。
由于它们的加工位置多变,在选择主视图时,主要考虑工作位置和形状特征。
对其它视图的选择,常常需要两个或两个以上的基本视图,并且还要用适当的局部视图、断面图等表达方法来表达零件的局部结构。
踏脚座零件图中所示视图选择表达方案精练、清晰对于表达轴承和肋的宽度来说,右视图是没有必要的,而对于T字形肋,采用剖面比较合适。
在标注叉架类零件的尺寸时,通常选用安装基面或零件的对称面作为尺寸基准。
尺寸标注方法参见图。
外检科检验标准手册检验标准编号SHWJ-001标准类别形位公差类引用标准GB 1958-80 标准种类通用标准序号检测项目检验标准检验手段检验方法示意图1 直线度“—”按图纸要求(一)平台、塞尺、刀口尺一、平面类零部件直线度检测方法:1、将零件表面清理干净,去除尖角毛刺。
2、将刀口尺或直尺与被测面直接接触并靠紧,此时平尺与被测面之间的最大间隙即为该检测面的直线度误差。
3、用塞尺检测刀尺塞尺刀尺移动方向被测件外检科检验标准手册检验标准编号SHWJ-001标准类别形位公差类引用标准GB 1958-80 标准种类通用标准序号检测项目检验标准检验手段检验方法示意图4、移动刀口尺,按此方法检测若干条素线,取其中最大误差值作为该件的直线度误差。
编制审核审定批准发放日期共页第页外检科检验标准手册检验标准编号SHWJ-001标准类别形位公差类引用标准GB 1958-80 标准种类通用标准序号检测项目检验标准检验手段检验方法示意图1 直线度“—”按图纸要求(二)平台、杠杆表、方箱、塞尺二、轴类零部件直线度检测方法:1、将零件表面清理干净,去除尖角毛刺。
2、将被测轴放在平台上,并固定靠紧在方箱底侧;3、用杠杆表在被测素线的全长范围内测量,同时记录检测数值,最大数值与最小数值之差即为该条素线直线度误差。
(或用塞尺直接测量轴与平台之间的最大间隙即可)方箱被测件杠杆表平台指示表移动方旋转被测件在整个圆周方向多次测量外检科检验标准手册检验标准编号SHWJ-001标准类别形位公差类引用标准GB 1958-80 标准种类通用标准序号检测项目检验标准检验手段检验方法示意图4、将轴旋转几个角度,按上述方法测量若干条素线,并计算,取其中最大的误差值,作为被测零部件的直线度误差。
编制审核审定批准发放日期共页第页2(一)平台、杠一、加工类较小平面检测:1、将零件表面清理干净,去除尖角毛刺。
2、将被测件用可调顶尖支撑在平台上找平A,B,C三点杠杆表外检科检验标准手册检验标准编号SHWJ-001标准类别形位公差类引用标准GB 1958-80 标准种类通用标准序号检测项目检验标准检验手段检验方法示意图平面度按图纸要求杆表、顶尖3、调整顶尖,使被测表面最远的三点A,B,C,与平台平行(利用杠杆表或高度尺使A、B、C三个点的高度相同)。
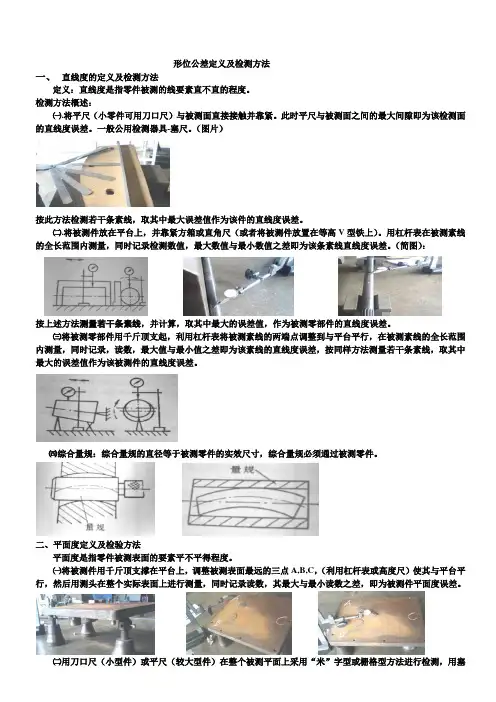
形位公差定义及检测方法一、直线度的定义及检测方法定义:直线度是指零件被测的线要素直不直的程度。
检测方法概述:㈠.将平尺(小零件可用刀口尺)与被测面直接接触并靠紧。
此时平尺与被测面之间的最大间隙即为该检测面的直线度误差。
一般公用检测器具-塞尺。
(图片)按此方法检测若干条素线,取其中最大误差值作为该件的直线度误差。
㈡.将被测件放在平台上,并靠紧方箱或直角尺(或者将被测件放置在等高V型铁上)。
用杠杆表在被测素线的全长范围内测量,同时记录检测数值,最大数值与最小数值之差即为该条素线直线度误差。
(简图):按上述方法测量若干条素线,并计算,取其中最大的误差值,作为被测零部件的直线度误差。
㈢将被测零部件用千斤顶支起,利用杠杆表将被测素线的两端点调整到与平台平行,在被测素线的全长范围内测量,同时记录,读数,最大值与最小值之差即为该素线的直线度误差,按同样方法测量若干条素线,取其中最大的误差值作为该被测件的直线度误差。
㈣综合量规:综合量规的直径等于被测零件的实效尺寸,综合量规必须通过被测零件。
二、平面度定义及检验方法平面度是指零件被测表面的要素平不平得程度。
㈠将被测件用千斤顶支撑在平台上,调整被测表面最远的三点A,B,C,(利用杠杆表或高度尺)使其与平台平行,然后用测头在整个实际表面上进行测量,同时记录读数,其最大与最小读数之差,即为被测件平面度误差。
㈡用刀口尺(小型件)或平尺(较大型件)在整个被测平面上采用“米”字型或栅格型方法进行检测,用塞尺进行检验,取其塞尺最大值为该被测零件得平面度误差。
㈢环类垫圈类零件将被测件的被测面放在平台上,压紧,然后用塞尺检测多处,其塞入的最大值即为该件的平面度误差。
(或者将被测件的被测面用三块等高垫铁在平台上均分支撑,然后用杠杆表在被测面的多处进行检测,取其最大与最小读数的差作为该件的平面度误差。
三、圆度定义及测量方法定义:圆度是指具有圆柱面(包括圆锥面)的零件在同一横剖面内的实际轮廓不圆的程度。

轴的形位公差标记方法轴的形位公差标记方法1. 引言形位公差在机械设计和制造中起着至关重要的作用。
它描述了两个或多个几何要素之间的相对位置关系,包括平行度、垂直度、倾斜度等。
本文将重点介绍轴的形位公差标记方法,探讨其应用和标记规则。
2. 形位公差的基本概念形位公差是用于描述两个或多个特征之间的位置、方向和倾斜度等相对关系的公差类型。
在轴的制造中,形位公差可用于衡量轴线的偏差和轴线之间的相对位置。
形位公差包括两个方面:轴向形位公差和径向形位公差。
3. 轴向形位公差标记方法轴向形位公差用于描述轴线和参考线(通常是垂直轴线)之间的相对位置关系。
在形位公差标记中,我们使用T形符号(△)来表示轴向形位公差,并结合数字来表示公差值。
△0.02表示轴线与参考线之间的位置偏差为0.02mm。
4. 径向形位公差标记方法径向形位公差用于描述轴上的圆度偏差和轴线偏差。
在形位公差标记中,我们使用直径符号(Ø)来表示径向形位公差,并结合数字来表示公差值。
Ø0.03表示轴的圆度偏差为0.03mm。
5. 形位公差的标记规则为了确保形位公差的正确理解和应用,我们需要遵循一些标记规则。
形位公差一般放置在特征控制框中,与特征图形相连。
形位公差应该标记在图纸上靠近需要控制的特征附近。
标记时应与公差线平行,并且应注明公差的类型和数值。
6. 应用举例为了更好地理解轴的形位公差标记方法,让我们来看一个实际的应用举例。
假设我们需要制造一个圆柱轴,其轴线在垂直方向上与参考轴线的位置偏差不超过0.02mm,圆度偏差不超过0.03mm。
在图纸上,我们可以使用△0.02表示轴线位置公差,并使用Ø0.03表示圆度公差。
7. 总结与回顾本文介绍了轴的形位公差标记方法。
我们了解到形位公差用于描述轴线的位置关系和轴的圆度偏差。
在标记时,我们使用△符号表示轴向形位公差,Ø符号表示径向形位公差,并结合数字表示公差值。
标记规则要求形位公差放置在特征控制框中,并与特征图形相连,以确保正确理解和应用。
轴类零件形位公差的确定作者:孙丽华来源:《新课程·教研版》2010年第20期摘要:形位公差和尺寸公差一样是评定产品质量的一项重要指标。
本文以常见的轴类零件为例,详细分析了形位公差的公差项目、公差值、基准和公差原则的选择和方法。
关键词:形位公差轴类零件功能要求经济性形位公差是评定机械零件的一项重要的技术经济指标。
在机械零件的设计过程中正确地选择形位公差项目以及合理地确定形位公差数值,对提高产品的质量和降低制造成本,具有十分重要的意义。
本文以减速器输出轴为例探讨机械零件形位公差的选择方法。
一、形位公差项目的确定确定形位公差项目时,需要考虑零件的几何特征、功能要求、检测方便及经济性等因素。
1.零件的几何特征零件的几何特征不同,会产生不同的形位误差。
如对圆柱面选择圆柱度是理想项目;平面零件可选择平面度;槽类零件可选对称度;阶梯轴、孔可选同轴度等。
2.零件的功能要求一般来讲,轴类零件的以下几个部位除了需要控制尺寸公差外,还要提出形位公差要求:(1)轴的支承面,它的形状和位置正确与否直接影响轴的运转精度。
因此应对两轴颈分别提出圆柱度要求,同时,要限制两轴颈同轴度误差。
另外,?准60r6处与齿轮孔配合,?准42r6处连接链轮,这两段轴线若不与两处轴颈的公共轴线同轴,会影响齿轮的啮合精度,产生振动和噪声,应分别提出同轴度要求。
(2)轴的定位面,它的形位精度将影响轴上零件的定位(周向和轴向定位)。
轴向定位如对齿轮、轴承的定位轴肩,应提出相对于两轴颈公共轴线的垂直度要求。
周向定位如两键槽面,考虑键受载均匀性及装拆难易程度,应提出对称度要求。
3.检测的方便性确定形位公差特征项目时,要考虑到检测的方便性与经济性。
二、形位公差值的确定形位公差值的确定一般是根据零件的功能要求,并考虑加工的经济性和零件的结构、刚度等情况进行的。
选择公差值的常用方法是类比法,采用类比法时应考虑以下情况:1.同一要素上给出的形状公差值应小于位置公差值,位置公差值应小于尺寸公差值。
《互换性与测量技术》三级项目报告题目:轴类零件的精度与检测班级:机控一班姓名:刘雅梁崔彭博李佳霖金炳岐钱达军指导教师:张艳提交时间:2014.12.15摘要在机械行业中,轴类零件的精度对传动的平稳性,轴的寿命等很多方面有重要作用,为此需对其精度进行分析与检测。
对轴类零件的结构特点及加工方法进行分析,根据其使用范畴,确定加工方法以及所能达到的精度等级,通过轴类零件的互换性,分析并确定轴和键、键槽所需要的尺寸公差、几何公差。
不同的加工方法对应不同的粗糙度等级,加工零件时根据粗糙度需要选取不同的加工方法,确定轴、键、键槽各部分的粗糙度。
用相应仪器对加工出来的轴类零件进行检测,选取允许范围内的零件进行装配。
目录0前言 (1)1 轴类零件的结构特点及加工方法 (2)2 轴类零件的误差种类及加工误差 (2)3 轴类零件的尺寸公差选用 (4)4 轴类零件的几何公差选用 (5)5 轴类零件的表面粗糙度选择 (6)结论 (7)参考文献 (8)0、前言随着现代生产技术、管理技术的进步和生产力的发展,产品的复杂程度及其质量要求日益提高。
为适应这种社会化大生产的需要,提高生产效率,降低成本,保证产品质量,必须按照专业化协作的原则进行生产。
在这种大背景下,机械设计人员需要在精度设计方面力求优化,所以《互换性与测量技术基础》课程的学习日益重要。
本次三级项目的研究目的就是在同学学习完本课程后,将理论投入实践,熟练运用尺寸公差、形状和位置公差、表面粗糙度,以及配合方面的知识,达到巩固与更深层次的理解。
本次项目涉及到轴类零件径向尺寸结构设计和公差的选择,轴类零件形位公差的选择,轴类零件表面粗糙度的选择,轴上的键槽尺寸选择,等一系列知识要点。
互换性与测量技术将测量、标准化与计量学等有关部分有机结合在一起,而且涉及机械设计、机械制造、质量控制、生产组织管理等许多方面。
它主要包含几何量公差选用和误差检验两方面的内容,与机械设计、机械制造及其质量控制密切相关。
镀铬轴设计技术规范目的: 为了统一镀铬轴的设计和技术要求,特制定本规范 一、哥林柱图一1、常用材料:40Cr,其化学成分应符合GB/T3077-1999的规定; 哥林柱直径≥Φ160,采用锻件,整体调质后机械性能符合探伤要求见CM/HC17-2006 注塑机用哥林柱检验技术规范 哥林柱直径<Φ160,采用40Cr 热轧圆钢,热处理方式:调质;2、表面处理镀硬铬厚度: d<Φ120 时为0.03~0.05;d≥Φ120时为0.05~0.07;3、杆径d的公差采用f7(镀铬后尺寸),未注表面粗糙度Ra 6.3;4、形位公差见图一规定;5、两端中心孔标注见图二。
图二采用C型(带螺纹)的型式当哥林柱直径d<Φ120时,采用CM10L20/16.3;当哥林柱直径Φ120≤d<Φ180时采用CM16L30/25.3;当d>Φ180时,采用CM24L50/38;标注示例:GB/T 4459.5-CM24L50/38标注说明:D=M24,L=50,D2=Φ38;(L为螺纹长度)6、退刀槽宽度L1参照下表7、卸载槽宽L2约为哥林柱直径的0.9倍,直径d2约为哥林柱直径的0.85~0.9倍。
8、不同截面过渡处的R1、R2值:建议取过渡处较小直径的0.2倍左右9、两端倒角应大于或等于1/2螺距10、两端螺纹(见图三)图三(1)普通螺纹M1、M2公差等级采用g6,大径f6,并参照以下标准: GB/T 193《普通螺纹直径与螺距系列》GB/T 196《普通螺纹基本尺寸》GB/T 197《普通螺纹公差与配合》GB/T 197-1981 内外螺纹的基本偏差(2)梯形螺纹Tr1、Tr2参照以下标准:GB/T5796.1 梯形基本牙型尺寸GB/T5796.2 梯形直径和螺距GB/T5796.3 梯形螺距基本尺寸GB/T5796.4 梯形螺纹公差(3)调模端一般用梯形螺纹;当d≥Φ125时用梯形螺纹,d<Φ125时用普通螺纹,但与头部螺距不能相等。
在数控机床上检测形位公差并自动校正工件的方法【摘要】本文介绍了在数控机床上用寻边器丈量工件尺寸及形位公差,同时快速设定工件零点的方法。
它的成功应用不仅为众多的中小企业充分利用数控机床的先进功能、节约购置专用检测设备的投进提供了经验,同时为一些特殊及相似零件的编程加工及检测打开了思路。
FANUC和SINUMERIK数控系统是当今应用范围最广泛的两类数控系统,固然在操纵方式上有所差异,但其基本方法是一致的,以下分别做出说明。
【关键词】形位公差寻边器检测LILi_li(SJ Petroleum Machinery Co. Sinopec Corp. Jingzhou Hubei, 434024, China)【Keywords】tolerance of form and position ; detecting ; the edge finder引言数控机床和三坐标丈量机均是机电一体化的自动化机械,数控机床是将被加工对象进行数字化处理,然后利用数字信息进行控制,从而加工出合格产品。
而三坐标丈量机则是在已加工好的产品上,利用测头与工件型面接触测得一系列点的坐标值,进而计算出尺寸、形位误差值的丈量设备,数控机床与三坐标丈量机均是利用坐标轴的移动实现自身功能。
基于这一共同点,该方法在不改变数控机床CNC控制系统的条件下 ,将数控机床原有的功能加以扩展,通过宏程序实现在数控机床上丈量工件尺寸及形位公差等多项功能。
1 硬件部分寻边器上测头的基本功能是触发和瞄准。
测头分为机械式、光电式、电气式三种。
测头性能的好坏,决定着丈量方式的难易、丈量精度的高低。
这次选用我国生产的应用极为广泛的硬线连接光电式测头,它属于接触式测头,为通用型球头测头,直径6毫米,能测定高度、槽宽、孔径和轮廓外形等。
2 软件部分2.1 SIEMENS系统中的宏程序;%_N_WORKPIECE ZERO AUTO SET_MPF (主程序名);$PATH=/_N_MPF_DIRIF R20<=0 GOTOF _LIF R20>4 GOTOF ERRORAAA:R20=R20CASE R20 OF 1 GOTOF _A 2 GOTOF _AA 3 GOTOF _B 4 GOTOF _BB DEFAULT GOTOF _E _A: R[R20]=$AA_IM[X]记录当前X轴机床坐标系的值,其结果保存在变量R1中MSG("RECORD R" <<R20<<"提示用户X轴方向的R1点坐标已经记录,按下复位键R20=R20+1M0_AA: R[R20]=$AA_IM[X]记录当前X轴机床坐标系的值,结果保存在变量R2中MSG("RECORD R" <<R20<<"&NBSP; BUTTON AND AXIS X POINT ?)提示用户Y轴方向的R3点坐标已经记录,按下复位键R20=R20+1M0_BB: R[R20]=$AA_IM[Y]记录当前Y轴机床坐标系中的值, 其结果保存在变量R4中MSG("RECORD R"<<R20<<" THEN AXIS POINT ?)在控制面板上显示出工件的直径(长度、宽度尺寸)M0GOTOF END_L: R20=1GOTOB AAAERROR: MSG(“ FIRST ENTER PART NUMBER 0 OR 1 TO &R20”) ;提示用户修改变量R20的值,首先将数值0或1填进变量R20中。
END:MSG() 清除所有信息M30 程序结束并返回程序开头2.2 FANUC系统中的宏程序O0999 (宏程序名)N1#1 =54.0 (选择坐标系 G54)#2 =0.1 (塞尺厚度)可根据实际情况改变该数值IF [#2 LT 0 ] GOTO2IF [#2 GT 1 ] GOTO2 (若塞尺厚度大于1mm,小于0mm则程序跳转到N2,面板上显示报警信息) IF [#1 EQ 54 ] GOTO54 (选择G54零点偏置)IF [#1 EQ 55 ] GOTO55 (选择G55零点偏置)#3000 =1(YOU INPUT ERR, INPUT 54-55) (机床报警)N2#3000=2(YOU INPUT ERR,INPUT 0.0-1.0)(机床报警:提示输进错误,请输进正确的塞尺厚度0-1.0)N54M3S60 (转换至手动状态,并沿水平方向缓慢移动产品,直至寻边器上的测头刚刚与孔壁(或者工件边沿)接触,此时寻边器上的指示灯会发光;)M0#501 =#5021 (读取当前X方向上X1点的机床坐标值;)M00 (转换至手动状态,启动主轴旋转,仅在水平方向缓慢移动产品,直至寻边器上的测头刚刚与孔壁接触,指示灯亮;)#502 =#5021 (读取当前X方向上X2点的机床坐标值;)#503 =[#501+#502]/2 (计算工件X方向中心点的坐标;)#801 =#5221 (记录G54零偏区中 X方向的中心;)#5221 =#503 (将X方向中心点坐标赋值到G54零偏区中;)M00 (假如工件是圆形的,则不移动机床;假如工件是矩形的,则转换至手动状态,启动主轴旋转;在竖直方向移动产品,直至寻边器上的测头刚刚与工件侧壁接触,如图2所示Y1点的位置;)#504 =#5022 (读取当前Y方向Y1点的机床坐标;)M00 (仅在竖直方向缓慢移动产品,直至寻边器上的测头刚刚与孔壁(或者工件边沿)接触(水平方向不动),); #505=#5022 (读取当前Y方向Y2点的机床坐标;)#506 =[#504+#505]/2 (计算工件Y方向的中心;)#802 =#5222 (记录G54 零偏区中Y轴的中心;)#5222 =#506 (设置G54 零偏区中Y轴的中心;)M00 (暂停,转换至手动状态,取下寻边器,将刀具装进主轴,移动刀具到恰好和塞尺接触的位置;预备丈量该刀具Z轴零位;) #508 =#5023 (读取当前Z方向机床坐标;)#509 =#508-#2-#[11000+#4120] (计算Z轴零位;) (注:#4120为当前主轴上刀具号,#11001、#11002、#11003......依次为1号刀的刀具长度补偿值,2号刀、3号刀......,值为正,若刀具补偿内存形式是B 类,则系统变量从#2001开始,同时此处11000可以改为2000) #803 =#5223 (记录当前G54 零偏区中Z轴的零点;)#5223 =#509 (设置当前G54 零偏区中Z轴的零点;)M00#510=2*SQRT[[#5021-#5221]*[#5021-#5221]+[#5022-#5222]*[#5022-#5222]]+ 6(计算工件直径尺寸;)#511=ABS[#502-#501]-6 (计算工件长度尺寸;)#512=ABS[#505-#504]-6 (计算工件宽度尺寸;)留意表达式中的数值“6”代表寻边器测头的直径。
N100 #3006=1(D=#510 L=#511 W=#512 )(在控制面板上显示工件直径(长度、宽度)各自所对应的变量名)GOTO 200M00N55 M3S60M00(G55 X POS AUTO SET) (以下G55的程序与上面相同,已省略;)N200 M30 程序结束3 项目的理论依据3.1 假设坐标轴上A B两点坐标分别为( xA , yA ,zA ) ( xB , yB , zB),根据坐标轴上两点间的间隔、中点计算公式及圆的标准方程(其中圆心O点坐标为(a,b),半径为r)可求得圆的半径尺寸和A B两点间的间隔 ,其中x=xA - xB;y=yA - yB;z=zA – zB,中点的坐标随之求得。
3.2 假如要检查产品的外形及位置公差,依据的原则为最小条件及最小二乘法。
就是利用离散采样数据点的集合,将一定的数学模型进行计算以获得丈量结果的过程。
由于应用本丈量方法测得的值均为一些要素表面离散点的坐标,因此要测出需要的几何元素误差值,还要进行相应的数学推导。
对于形位误差的丈量,只需用增加工件上的几个丈量点,即可完成产品的直线度、圆度、同轴度等检测项目。
丈量精度可以达到0.003毫米,较常规检测更为精确。
下面以丈量图1中孔轴线的直线度为例做扼要说明:(公式推导过程省略)公式(1)将该直线方程化为一般式:ax + b - y = 0 公式(2)然后,求得各个丈量点到该最小二乘线的间隔:d =(axi - yi + b)/ 公式(3)设待测公差项目是孔轴线的直线度,公差为小于0.005mm。
先将孔沿轴向划分为N 个截面(本例取N = 4) , 测得每一截面上孔内表面上任意三个点的坐标(见下表) ,根据数学定理:不在同一条直线上的三点确定一个圆, 可求得各截面圆对应的孔中心坐标, 将此N 个孔中心的坐标xi 、 yi 代进式公式(1) ,拟合最小二乘直线y = ax + b,再将各圆心点的坐标代进式(3) ,可求出各个孔的中心点到该直线的间隔;误差值为2dmax。
表寻边器丈量孔内4个截面上任意三点的坐标值此为任意方向上孔的直线度误差:计算结果Δ = 2dmax = 0.0082mm。
该数值大于设定的公差值0.005mm,因此该检测项目分歧格。
图1图2 圆形工件图3 矩形工件图2、图3中红色粗实线代表工件轮廓,玄色细实线小圆圈代表寻边器上测头的不同位置。
以水平方向作为X轴方向,以竖直方向作为Y轴方向设定坐标系。
按照宏程序中的说明,先将寻边器装进主轴,使主轴低速(一般取60-80转/分钟)旋转,然后转换至JOG方式,找到X1点的坐标,然后依次是X2点,Y1点,Y2点,留意矩形工件与圆形工件在Y1点的位置选择上有区别(如图所示),其余操纵相同,可在20秒钟之内让系统自动记录并在指定的零点偏置区(G54或G55等)中输进工件(X、Y轴)中心点坐标和Z轴的零点,假如是FANUC系统的机床,则会显示出圆形工件的直径(和矩形工件的长度、宽度)所对应的参数号:#510、#511、#512等,这些变量对应的数值保存在OFFSET界面下。
查看时先按功能【OFFSET SETTING】键,按下继续菜单键 , 再按下章节选择软键[MACRO](宏);用翻页键或数值键及软键[NO.SRH](NO.搜索)选择参数号,即可显示每一个参数所对应的具体数值。
假如是在SIEMENS系统的机床上,则会直接在控制面板上显示出圆形工件的直径(和矩形工件的长度、宽度)尺寸。
4 结束语通过一段时间的使用测试,该方法完全满足了实际加工和检测过程的需要,可以即时检测产品同轴度、直线度等项目,免往了转运到三坐标丈量仪上进行检测的时间和用度,体现出较明显的高效性、实用性和稳定性。