模糊控制实例
- 格式:ppt
- 大小:338.50 KB
- 文档页数:11
模糊控制应用实例模糊控制是一种基于模糊逻辑的控制方法,它能够处理模糊的输入和输出,使得控制系统具有更好的鲁棒性和适应性。
下面将介绍一个模糊控制的应用实例。
某工厂的生产线上有一台机器人,它需要根据生产线上的物品进行分类和分拣。
由于生产线上的物品形状、颜色、大小等特征存在一定的模糊性,传统的控制方法很难实现准确的分类和分拣。
因此,工厂决定采用模糊控制方法来解决这个问题。
首先,需要对机器人的控制系统进行建模。
假设机器人的控制系统包括三个输入变量和一个输出变量。
其中,三个输入变量分别为物品的大小、颜色和形状,输出变量为机器人的动作,包括分类和分拣两种动作。
接下来,需要确定输入变量和输出变量的模糊集合和模糊规则。
假设物品的大小、颜色和形状分别属于三个模糊集合:小、中、大;红、绿、蓝;圆、方、三角。
输出变量也分别属于两个模糊集合:分类、分拣。
根据这些模糊集合,可以确定一些模糊规则,例如:如果物品大小为小且颜色为红且形状为圆,则机器人动作为分类;如果物品大小为中且颜色为绿且形状为方,则机器人动作为分拣;如果物品大小为大且颜色为蓝且形状为三角,则机器人动作为分类。
最后,需要进行模糊推理和模糊控制。
当机器人接收到一个物品时,它会根据物品的大小、颜色和形状,将它们映射到对应的模糊集合中。
然后,根据模糊规则进行模糊推理,得到机器人的动作。
最后,根据机器人的动作,控制机器人进行分类或分拣。
通过模糊控制方法,机器人可以更准确地分类和分拣物品,提高生产效率和质量。
同时,模糊控制方法还具有较好的鲁棒性和适应性,能够应对物品特征的变化和噪声的干扰。
总之,模糊控制是一种有效的控制方法,它能够处理模糊的输入和输出,使得控制系统具有更好的鲁棒性和适应性。
在工业生产、交通运输、医疗健康等领域都有广泛的应用。
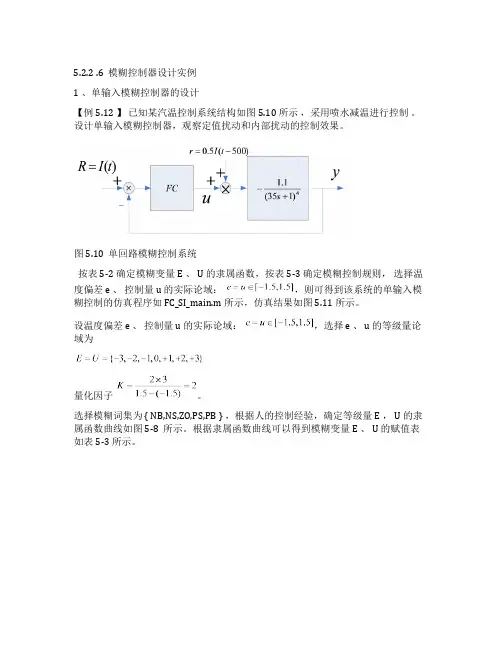
5.2.2 .6 模糊控制器设计实例1 、单输入模糊控制器的设计【例 5.12 】已知某汽温控制系统结构如图 5.10 所示,采用喷水减温进行控制。
设计单输入模糊控制器,观察定值扰动和内部扰动的控制效果。
图 5.10 单回路模糊控制系统按表 5-2 确定模糊变量 E 、 U 的隶属函数,按表 5-3 确定模糊控制规则,选择温度偏差 e 、控制量 u 的实际论域:,则可得到该系统的单输入模糊控制的仿真程序如 FC_SI_main.m 所示,仿真结果如图 5.11 所示。
设温度偏差 e 、控制量 u 的实际论域:,选择 e 、 u 的等级量论域为量化因子。
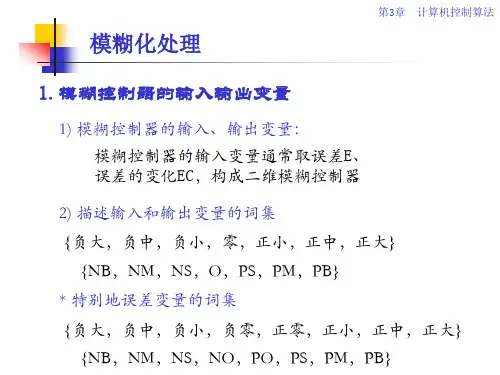
选择模糊词集为 { NB,NS,ZO,PS,PB } ,根据人的控制经验,确定等级量 E , U 的隶属函数曲线如图 5-8 所示。
根据隶属函数曲线可以得到模糊变量 E 、 U 的赋值表如表 5-3 所示。
图5-8 E ,U 的隶属函数曲线表 5-3 模糊变量 E 、 U 的赋值表( μ )-3 -2 -1 0 1 2 3 等级量μE 、 UPB 0 0 0 0 0 0.5 1 PS 0 0 0 0 1 0.5 0 ZO 0 0 0.5 1 0.5 0 0 NS 0 0.5 1 0 0 0 0 NB 1 0.5 0 0 0 0 0依据人手动控制的一般经验,可以总结出一些控制规则,例如:若误差 E 为 O ,说明温度接近希望值,喷水阀保持不动;若误差 E 为正,说明温度低于希望值,应该减少喷水;若误差 E 为负,说明温度高于希望值,应该增加喷水。
若采用数学符号描述,可总结如下模糊控制规则:若 E 负大,则 U 正大;若 E 负小,则 U 正小;若 E 为零,则 U 为零;若 E 正小,则 U 负小;若 E 正大,则 U 负大。
写成模糊推理句 :if E =NB then U =PBif E =NS then U =PSif E=ZO then U=ZOif E =PS then U =NSif E =PB then U =NB由上述的控制规则可得到模糊控制规则表,如表 5-4 所示。
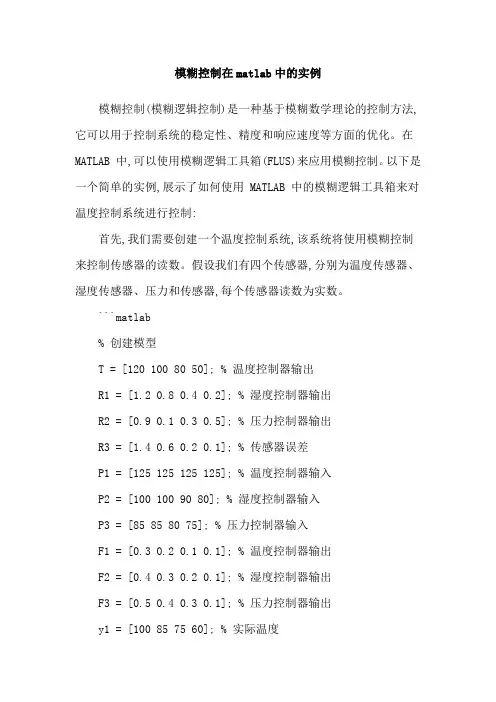
模糊控制在matlab中的实例模糊控制(模糊逻辑控制)是一种基于模糊数学理论的控制方法,它可以用于控制系统的稳定性、精度和响应速度等方面的优化。
在MATLAB 中,可以使用模糊逻辑工具箱(FLUS)来应用模糊控制。
以下是一个简单的实例,展示了如何使用 MATLAB 中的模糊逻辑工具箱来对温度控制系统进行控制:首先,我们需要创建一个温度控制系统,该系统将使用模糊控制来控制传感器的读数。
假设我们有四个传感器,分别为温度传感器、湿度传感器、压力和传感器,每个传感器读数为实数。
```matlab% 创建模型T = [120 100 80 50]; % 温度控制器输出R1 = [1.2 0.8 0.4 0.2]; % 湿度控制器输出R2 = [0.9 0.1 0.3 0.5]; % 压力控制器输出R3 = [1.4 0.6 0.2 0.1]; % 传感器误差P1 = [125 125 125 125]; % 温度控制器输入P2 = [100 100 90 80]; % 湿度控制器输入P3 = [85 85 80 75]; % 压力控制器输入F1 = [0.3 0.2 0.1 0.1]; % 温度控制器输出F2 = [0.4 0.3 0.2 0.1]; % 湿度控制器输出F3 = [0.5 0.4 0.3 0.1]; % 压力控制器输出y1 = [100 85 75 60]; % 实际温度y2 = [120 95 80 70]; % 实际湿度y3 = [135 110 90 80]; % 实际压力% 创建模糊控制器go1 = @(t,u,v) if t > 100 then ((1-v)*F1 + v*R1 +(1+v)*R2)/(1-v)*y1 else 0;go2 = @(t,u,v) if t < 50 then ((1-v)*F3 + v*R1 +(1+v)*R2)/(1-v)*y2 else 0;go3 = @(t,u,v) if t == 0 then ((1-v)*F1 + v*R1 +(1+v)*R2)/(1-v)*y3 else 0;% 创建模糊控制器的优化器var = [0 0 0 0];go1(0,:,:) = var;matlab.模糊控制.优化器.LevenbergMarquardt(var,go1);% 运行模糊控制器[t,u,v] = ode45(go1,[0 1],[120 100 80 50],y1);% 输出结果disp(["实际温度:" num2str(t)]);disp(["实际湿度:" num2str(u)]);disp(["实际压力:" num2str(v)]);```在这个例子中,我们使用 MATLAB 中的 ode45 工具箱来拟合温度控制器和湿度控制器的输出响应函数。
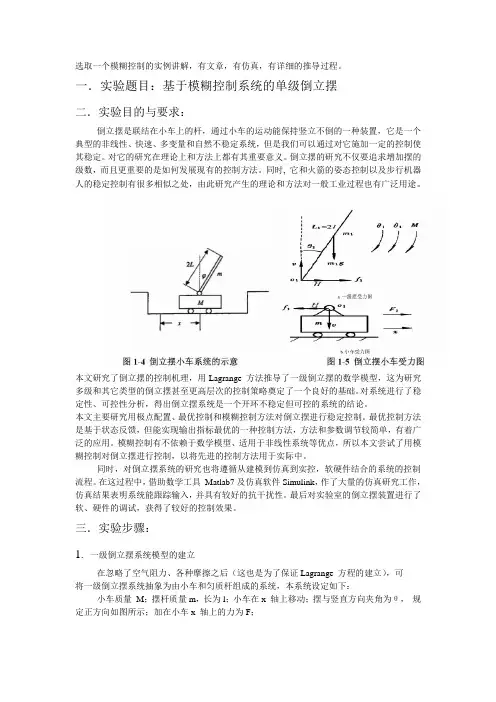
选取一个模糊控制的实例讲解,有文章,有仿真,有详细的推导过程。
一.实验题目:基于模糊控制系统的单级倒立摆二.实验目的与要求:倒立摆是联结在小车上的杆,通过小车的运动能保持竖立不倒的一种装置,它是一个典型的非线性、快速、多变量和自然不稳定系统,但是我们可以通过对它施加一定的控制使其稳定。
对它的研究在理论上和方法上都有其重要意义。
倒立摆的研究不仅要追求增加摆的级数,而且更重要的是如何发展现有的控制方法。
同时, 它和火箭的姿态控制以及步行机器人的稳定控制有很多相似之处,由此研究产生的理论和方法对一般工业过程也有广泛用途。
本文研究了倒立摆的控制机理,用Lagrange 方法推导了一级倒立摆的数学模型,这为研究多级和其它类型的倒立摆甚至更高层次的控制策略奠定了一个良好的基础。
对系统进行了稳定性、可控性分析,得出倒立摆系统是一个开环不稳定但可控的系统的结论。
本文主要研究用极点配置、最优控制和模糊控制方法对倒立摆进行稳定控制。
最优控制方法是基于状态反馈,但能实现输出指标最优的一种控制方法,方法和参数调节较简单,有着广泛的应用。
模糊控制有不依赖于数学模型、适用于非线性系统等优点,所以本文尝试了用模糊控制对倒立摆进行控制,以将先进的控制方法用于实际中。
同时,对倒立摆系统的研究也将遵循从建模到仿真到实控,软硬件结合的系统的控制流程。
在这过程中,借助数学工具Matlab7及仿真软件Simulink,作了大量的仿真研究工作,仿真结果表明系统能跟踪输入,并具有较好的抗干扰性。
最后对实验室的倒立摆装置进行了软、硬件的调试,获得了较好的控制效果。
三.实验步骤:1.一级倒立摆系统模型的建立在忽略了空气阻力、各种摩擦之后(这也是为了保证Lagrange 方程的建立),可将一级倒立摆系统抽象为由小车和匀质杆组成的系统,本系统设定如下:小车质量M;摆杆质量m,长为l;小车在x 轴上移动;摆与竖直方向夹角为θ,规定正方向如图所示;加在小车x 轴上的力为F;拉格朗日算子L 是系统动能Ec 和势能Ep 之差,拉格朗日方程由拉格朗日算子L 和广义坐标qi ( i=1,2,3⋯n) 表示如下:Fi 为系统沿该广义坐标方向上的外力,D 为由摩擦而消失的能,本系统中可认为D=0;本系统有两个广义坐标分别是x、θ。
模糊控制在matlab中的实例
MATLAB 是一种广泛使用的数学软件,可以用于模糊控制的研究和应用。
以下是一些在 MATLAB 中的模糊控制实例:
1. 模糊控制器的设计:可以通过建立模糊控制器的数学模型,使用 MATLAB 进行建模和优化,以实现精确的控制效果。
2. 模糊控制应用于电动机控制:可以使用 MATLAB 对电动机进行模糊控制,以实现精确的速度和位置控制。
3. 模糊控制在工业过程控制中的应用:在工业过程中,可以使用模糊控制来优化生产过程,例如温度控制、流量控制等。
4. 模糊控制在交通运输中的应用:在交通运输中,可以使用模糊控制来优化车辆的行驶轨迹和速度,以提高交通运输的安全性和效率。
5. 模糊控制在机器人控制中的应用:可以使用模糊控制来优化机器人的运动和操作,以实现更准确和高效的操作。
这些实例只是模糊控制应用的一部分,MATLAB 作为一种强大的数学软件,可以用于各种模糊控制的研究和应用。

模糊控制算法实例解析(含代码)
首先来看一个实例,控制进水阀S1和出水阀S2,使水箱水位保持在目标水位O处。
按照日常操作经验,有以下规则:
1、若当前水位高于目标水位,则向外排水,差值越大,排水越快;
2、若当前水位低于目标水位,则向内注水,差值越大,注水越快;
3、若当前水位和目标水位相差很小,则保持排水速度和注水速度相等。
下面来设计一个模糊控制器
1、选择观测量和控制量
一般选择偏差e,即目标水位和当前水位的差值作为观察量,选取阀门开度u为控制量。
2、输入量和输出量的模糊化
将偏差e划分为5个模糊集,负大(NB)、负小(NS)、零(ZO)、正小(PS)、正大(PB),e为负表示当前水位低于目标水位,e 为正表示当前水位高于目标水位。
设定e的取值范围为[-3,3],隶属度函数如下。
偏差e对应的模糊表如下:隶属度
变化等级-3 -2
-1
1
2
3模糊集
PB 0 0 0 0 0 0.5
1PS 0
0 0.5 1 0.5 0ZO
0 0.5 1 0.5 0
0NS
0 0.5 1 0.5 0
0NB
0.5 0 0 0 0 0。
模糊控制应用实例1. 引言模糊控制是一种基于模糊逻辑的控制方法,它能够处理不确定性和模糊性问题。
本文将介绍模糊控制的应用实例,包括模糊控制在机器人导航、温度控制和交通信号灯控制等方面的应用。
2. 模糊控制在机器人导航中的应用2.1 模糊控制器设计在机器人导航中,模糊控制可以用于控制机器人的运动路径。
首先,需要设计一个模糊控制器,该控制器包括输入和输出变量以及一组模糊规则。
输入变量可以是机器人与障碍物的距离、机器人当前的角度等。
输出变量通常是机器人的速度和转向角度。
2.2 模糊控制器实现在机器人导航中,可以使用传感器来获取机器人与障碍物的距离和机器人当前的角度。
这些信息可以作为输入变量输入到模糊控制器中。
模糊控制器根据一组模糊规则来计算机器人的速度和转向角度,然后将其作为输出变量输出给机器人的控制系统。
2.3 模糊控制器优势相比于传统的控制方法,模糊控制在机器人导航中具有一定的优势。
首先,模糊控制能够处理不确定性和模糊性问题,使得机器人能够更好地适应复杂的环境。
其次,模糊控制可以通过调整模糊规则和输入变量的权重来优化机器人的导航性能。
最后,模糊控制可以很容易地与其他控制方法结合使用,以实现更高级的导航功能。
3. 模糊控制在温度控制中的应用3.1 温度控制系统在温度控制中,模糊控制可以用于调节加热器或制冷器的功率,以维持目标温度。
温度控制系统通常包括一个温度传感器、一个控制器和一个执行器。
温度传感器用于测量当前的温度,控制器根据温度的变化来调整执行器的功率。
3.2 模糊控制器设计在温度控制中,需要设计一个模糊控制器来根据当前的温度误差和误差变化率来调整执行器的功率。
模糊控制器的输入变量可以是温度误差和误差变化率,输出变量可以是执行器的功率。
通过选择适当的模糊规则和调整输入变量的权重,可以实现温度的稳定控制。
3.3 模糊控制器实现在温度控制中,可以使用一个模糊控制器来计算执行器的功率。
模糊控制器根据一组模糊规则来决定执行器的功率大小,然后将其输出给执行器。
模糊pid控制实例以下是一个模糊PID控制的简单实例:假设我们要控制一台电机的转速,目标是使电机转速尽可能稳定在设定值附近。
根据模糊PID控制器的工作原理,我们可以进行以下步骤:1. 设定目标值和初始设定值:设定电机转速的目标值,例如1000转/分钟。
同时设置初始的PID参数。
- 设定值(SP,Set Point)= 1000 RPM- 比例增益 (Kp) = 1- 积分时间(Ti) = 1- 微分时间(Td) = 0.12. 测量电机转速:使用传感器或编码器来测量电机当前的转速,得到当前的反馈值。
3. 模糊控制规则建立:基于当前误差(设定值减去反馈值)和误差的变化率,建立一组模糊逻辑规则,例如: - 如果误差为"NB"并且误差变化率为"PB",则输出为"NB"。
- 如果误差为"NB"并且误差变化率为"NM",则输出为"NM"。
- ...4. 模糊推理和模糊输出:根据模糊逻辑规则,进行模糊推理,即将当前的误差和误差变化率映射到模糊输出的隶属度值上。
5. 解模糊:将模糊输出映射回具体的控制量,例如根据模糊输出计算PID控制器的输出量。
6. 更新PID参数:根据误差的变化和模糊输出的结果来更新PID控制器的参数,例如根据误差的大小和变化率来调整PID参数,以使控制更加精确。
7. 反馈控制:将PID控制器的输出量应用于电机,调整电机的转速。
8. 循环控制:循环执行上述步骤,不断更新PID参数和反馈控制,使得电机转速尽可能稳定在设定值附近。
需要注意的是,以上是一个简单的示例,实际的模糊PID控制根据具体的应用情况和系统特点会有所差异。
参数的选择和模糊规则的建立都需要根据具体的控制对象进行优化和调整。
此外,在实际应用中,还需要考虑到系统的鲁棒性、性能指标等因素。
一、速度控制算法: 首先定义速度偏差-50 km/h ≤e (k )≤50km/h ,-20≤ec (i )= e (k )- e (k-1)≤20,阀值e swith =10km/h设计思想:油门控制采用增量式PID 控制算法,刹车控制采用模糊控制算法,最后通过选择规则进行选择控制量输入。
选择规则:e (k )<0 ① e (k )>- e swith and throttlr_1≠0 选择油门控制② 否则:先将油门控制量置0,再选择刹车控制 0<e (k ) 先选择刹车控制,再选择油门控制 e (k )=0 直接跳出选择刹车控制:刹车采用模糊控制算法1.确定模糊语言变量 e 基本论域取[-50,50],ec 基本论域取[-20,20],刹车控制量输出u 基本论域取[-30,30],这里我将这三个变量按照下面的公式进行离散化:)]2(2[ba x ab n y +--= 其中,],[b a x ∈,n 为离散度。
E 、ec 和u 均取离散度n=3,离散化后得到三个量的语言值论域分别为:E=EC=U={-3,-2,-1,0,1,2,3}其对应语言值为{ NB,NM,NS,ZO, PS,PM,PB } 2.确定隶属度函数E/EC 和U 取相同的隶属度函数即:E EC U(,5,1)(,3,2,0)(,3,1,1)u (,2,0,2)(,1,1,3)(,0,2,3)(,1,5)g x trig x trig x trig x trig x trig x g x ∧∧--⎧⎪--⎪⎪--⎪=-⎨⎪-⎪⎪⎪⎩说明:边界选择钟形隶属度函数,中间选用三角形隶属度函数,图像略实际EC 和E 输入值若超出论域范围,则取相应的端点值。
3.模糊控制规则由隶属度函数可以得到语言值隶属度(通过图像直接可以看出)如下表: 表1:E/EC 和U3.模糊推理由模糊规则表3可以知道输入E 与EC 和输出U 的模糊关系,这里我取两个例子做模糊推理如下:if (E is NB) and (EC is NM) then (U is PB) 那么他的模糊关系子矩阵为:1211U EC E R R R R ⨯⨯=其中,711)0,,0,5.0,1(0⨯== P R E ,即表1中NB 对应行向量,同理可以得到,712)0,,0,5.0,1,0(1⨯== P R EC , 711)0,,0,5.0,1(0⨯== P R U77210000000000005.05.00005.010)0,,0,5.0,1,0()0,,0,5.0,1(⨯⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡=⨯=⨯TEC E R R 49121)0,,0,5.0,5.0,0,0,0,0,0,5.0,1,0(⨯= EC E R7491211000000005.05.00005.0100000)0,,0,5.0,1()0,,5.0,1,0(⨯⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡=⨯=⨯= TU EC E R R Rif (E is NVB or NB) and (EC is NVB) then (U is PVB)1112U EC E R R R R ⨯⨯= 结果略按此法可得到27个关系子矩阵,对所有子矩阵取并集得到模糊关系矩阵如下:)27,,2,1(21 ==i R R R R i 由R 可以得到模拟量输出为:()U E EC R =⨯4.去模糊化由上面得到的模拟量输出为1×7的模糊向量,每一行的行元素(u (z ij ))对应相应的离散变量z j ,则可通过加权平均法公式解模糊:)21,,2,1()()(210210 ===∑∑==j i zu z zu u i iji jij从而得到实际刹车控制量的精确值u 。
模糊控制在matlab中的实例以下是一个简单的模糊控制实例,使用Matlab进行实现:假设有一辆小车,需要通过模糊控制来控制它的速度。
1. 首先,我们需要定义输入(error)和输出(delta),并且规定它们的范围:```inputRange = [-2 2];outputRange = [-1 1];```其中,inputRange表示error的范围为-2到2,outputRange表示delta的范围为-1到1。
2. 接下来,我们需要定义模糊变量:```error = fisvar("input", "error", "range", inputRange); delta = fisvar("output", "delta", "range", outputRange); ```这里我们定义了两个模糊变量:输入变量error和输出变量delta。
3. 然后,我们需要用隶属函数来描述模糊变量:```errorFuncs = [fisGaussmf(error, -1, 0.5) % NBfisGaussmf(error, 0, 0.5) % ZOfisGaussmf(error, 1, 0.5) % PB];deltaFuncs = [fisGaussmf(delta, -1, 0.25) % NBfisGaussmf(delta, 0, 0.25) % ZOfisGaussmf(delta, 1, 0.25) % PB];```在这个例子中,我们使用了高斯隶属函数来描述模糊变量。
NB 表示“negative big”(负大),ZO表示“zero”(零),PB表示“positive big”(正大)。
4. 接下来,我们需要定义规则:```ruleList = [1 1 1 3 % NB -> PB2 1 1 2 % ZO -> NB3 1 1 1 % PB -> ZO];```这个规则表达式的意思是:如果error是NB,则delta是PB;如果error是ZO,则delta是NB;如果error是PB,则delta是ZO。
模糊控制在matlab中的实例以下是一个模糊控制在MATLAB中的简单实例:假设我们要设计一个模糊控制器来控制一个水箱中水位的高低。
我们可以先建立一个模糊推理系统,其中包含输入和输出变量以及规则。
1. 输入变量:水箱中的水位(假设范围为0到100)。
2. 输出变量:水泵的流量(假设范围为0到10)。
我们需要定义一组模糊规则,例如:如果水箱中的水位为低,则水泵的流量为低。
如果水箱中的水位为中等,则水泵的流量为中等。
如果水箱中的水位为高,则水泵的流量为高。
将这些规则转换成模糊集合,如下所示:输入变量:- 低:[0, 30]- 中等:[20, 50]- 高:[40, 100]输出变量:- 低:[0, 3]- 中等:[2, 6]- 高:[4, 10]接下来,我们可以使用MATLAB的Fuzzy Logic Toolbox来建立模糊推理系统。
以下是一个简单的MATLAB脚本:```% 定义输入变量water_level = fisvar("input", "Water Level", [0 100]); water_level.addmf("input", "low", "trapmf", [0 0 30 40]); water_level.addmf("input", "medium", "trimf", [20 50 80]);water_level.addmf("input", "high", "trapmf", [60 70 100 100]);% 定义输出变量pump_flow = fisvar("output", "Pump Flow", [0 10]);pump_flow.addmf("output", "low", "trapmf", [0 0 3 4]); pump_flow.addmf("output", "medium", "trimf", [2 6 8]); pump_flow.addmf("output", "high", "trapmf", [7 8 10 10]); % 建立模糊推理系统rule1 = "If Water Level is low then Pump Flow is low"; rule2 = "If Water Level is medium then Pump Flow is medium"; rule3 = "If Water Level is high then Pump Flow is high"; rules = char(rule1, rule2, rule3);fis = newfis("Water Tank Fuzzy Controller");fis = addvar(fis, water_level);fis = addvar(fis, pump_flow);fis = addrule(fis, rules);% 模糊控制器输入water_level_value = 70;% 运行模糊推理系统pump_flow_value = evalfis([water_level_value], fis);disp(["Water level: " num2str(water_level_value) "%"]); disp(["Pump flow: " num2str(pump_flow_value)]);```在这个简单的例子中,我们使用了Fuzzy Logic Toolbox来定义输入和输出变量以及规则,并运行模糊推理系统来计算输出值。