智能控制模糊控制设计实例
- 格式:ppt
- 大小:375.50 KB
- 文档页数:10

智能控制的主要控制方法一、模糊控制。
1.1 模糊控制的基本概念。
模糊控制啊,就像是一种“差不多”的控制方法。
它不追求精确到小数点后多少位的数值,而是用一些模糊的概念,像“大”“小”“快”“慢”之类的。
比如说,要控制房间的温度,它不会精确到25.5度,而是大概分为“冷”“合适”“热”这么几个模糊的状态。
这就很符合咱们日常生活中的思维方式,咱们人在判断很多事情的时候,也不是用特别精确的数字,而是靠这种模糊的感觉。
就像咱们常说的“差不多得了”,模糊控制就是这么个意思。
1.2 模糊控制的应用。
在实际生活中,模糊控制的应用可不少呢。
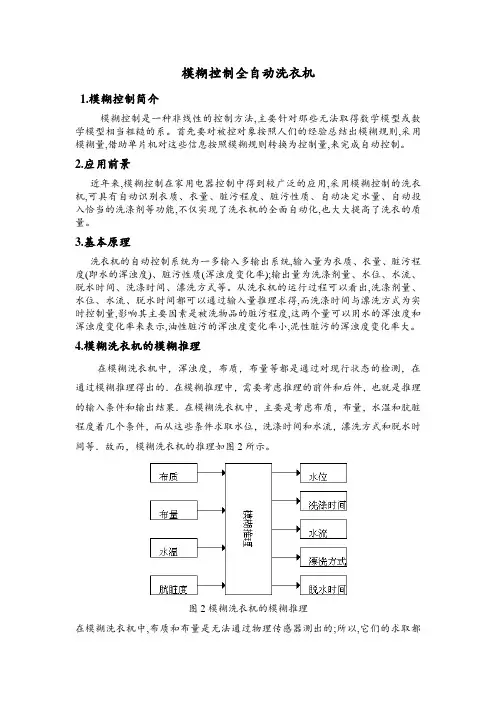
像洗衣机的控制,它不知道衣服到底有多脏,但是可以根据衣物的重量、材质等大概的因素,来确定洗涤的时间和强度。
这就好比一个有经验的主妇,虽然不能精确测量污垢的含量,但是凭借经验就能把衣服洗得差不多干净。
还有汽车的自动变速器,它根据车速、油门踏板的位置等模糊的信息,来决定换挡的时机,不需要精确计算每一个瞬间的动力需求。
二、神经网络控制。
2.1 神经网络控制的原理。
神经网络控制就像是模拟人的大脑神经工作方式。
它有很多的神经元节点,这些节点之间相互连接,就像大脑里的神经细胞一样。
每个节点都能接收和处理信息,然后把处理后的结果传递给其他节点。
这就好比一个庞大的信息传递网络,大家互相协作。
这有点像咱们常说的“众人拾柴火焰高”,众多的神经元一起工作,来实现对系统的控制。
2.2 神经网络控制的实例。
比如说在图像识别方面,神经网络控制就大显身手了。
它可以识别出照片里是猫还是狗,或者是其他的物体。
就像人的眼睛和大脑的结合一样,神经网络通过对图像的大量特征进行分析,就像咱们看东西的时候会注意到动物的耳朵、眼睛、尾巴等特征,它也是这么去判断的。
再比如在股票市场预测中,虽然不能做到百分百准确,但是它可以根据历史数据等众多因素,像公司的业绩、市场的趋势等,来对股票价格的走势做出一个大致的预测。
三、遗传算法控制。
模糊控制的应用实例与分析本页仅作为文档封面,使用时可以删除This document is for reference only-rar21year.March模糊控制的应用学院实验学院专业电子信息工程姓名指导教师日期 2011 年 9 月 20 日在自动控制中,包括经典理论和现代控制理论中有一个共同的特点,即控制器的综合设计都要建立在被控对象准确的数学模型(如微分方程等)的基础上,但是在实际工业生产中,很多系统的影响因素很多,十分复杂。
建立精确的数学模型特别困难,甚至是不可能的。
这种情况下,模糊控制的诞生就显得意义重大,模糊控制不用建立数学模型,根据实际系统的输入输出的结果数据,参考现场操作人员的运行经验,就可对系统进行实时控制。
模糊控制实际上是一种非线性控制,从属于智能控制的范畴。
现代控制系统中的的控制能方便地解决工业领域常见的非线性、时变、在滞后、强耦合、变结构、结束条件苛刻等复杂问题。
可编程控制器以其高可靠性、编程方便、耐恶劣环境、功能强大等特性很好地解决了工业控制领域普遍关心的可靠、安全、灵活、方便、经济等问题,这两者的结合,可在实际工程中广泛应用。
所谓模糊控制,其定义是是以模糊数学作为理论基础,以人的控制经验作为控制的知识模型,以模糊集合、模糊语言变量以及模糊逻辑推理作为控制算法的一种控制。
模糊控制具有以下突出特点:(1)模糊控制是一种基于规则的控制,它直接采用语言型控制规则,出发点是现场操作人员的控制经验或相关专家的知识,在设计中不需要建立被控对象的精确的数学模型,因而使得控制机理和策略易于接受与理解,设计简单,便于应用(2)由工业过程的定性认识出发,比较容易建立语言控制规则,因而模糊控制对那些数学模型难以获取,动态特性不易掌握或变化非常显著的对象非常适用。
(3)基于模型的控制算法及系统设计方法,由于出发点和性能指标的不同,容易导致较大差异;但一个系统语言控制规则却具有相对的独立性,利用这些控制规律间的模糊连接,容易找到折中的选择,使控制效果优于常规控制器。
智能控制工程中的模糊控制算法随着科技的不断发展,人工智能开始走入人们的生活中,并渗透到了各个领域当中。
智能控制工程作为其中的一种应用,正在受到越来越多的关注。
而作为智能控制工程中的一个重要技术手段,模糊控制算法在这个领域中得到了广泛的应用。
模糊逻辑是一种基于模糊数学的逻辑体系,它允许分类和处理不确定的信息。
在计算机领域中,模糊控制就是一种基于模糊逻辑的控制方法,它用来解决那些有模糊性、不确定性或者非线性的控制问题。
模糊控制算法的核心在于将模糊推理原理运用到控制系统中。
首先需要通过分析控制系统的输入输出变量,建立数学模型。
接下来是规则库的建立,通过专家的判断和经验,将控制变量之间的关系作为规则库的内容记录下来。
最终,通过模糊推理来求解控制系统输出的控制量。
在实际的应用中,模糊控制算法具有以下几个优点。
首先,模糊控制算法不需要精确的数学模型来描述被控对象,只需要根据经验和专家知识建立一些模糊规则即可。
这样可以大大降低建模的难度和复杂度。
其次,模糊控制算法可以处理非线性系统和时变系统,可以解决传统的线性控制方法无法处理的问题。
最后,模糊控制算法可以很好地处理控制对象模糊不确定、噪声干扰等问题。
在实际的应用中,模糊控制算法得到了广泛的应用。
例如在工业自动化控制中,模糊控制算法可以应用于水处理、化工、轧钢等工业过程中的控制;在电力系统中,可以应用于电力厂调度、电网控制、发电机组控制等方面;在交通管理中,模糊控制算法可以应用于智能交通系统、车辆控制等方面。
虽然模糊控制算法在工程应用中具有广泛的应用前景,但是它也存在一些问题和挑战。
首先,模糊控制算法的规则库建立需要专家的知识和经验,对于某些复杂的系统,规则库的建立非常困难。
其次,模糊控制算法需要很好地解决模糊推理的问题,才能得到准确的控制量。
最后,模糊控制算法需要在实际的控制系统中进行充分的实验和验证,才能确保其有效性和可靠性。
综合而言,模糊控制算法是一种有效的控制方法,可以解决那些由于复杂性、非线性或者模糊性而难以进行精确控制的问题。
智能控制及MATLAB实现—水箱液位模糊控制仿真设计智能控制是一种利用先进的智能技术和算法来实现自动控制的方法。
在智能控制中,模糊控制是一种常见且有效的方法之一、模糊控制通过将模糊逻辑应用于控制系统中的输入和输出,根据模糊规则来进行决策和控制。
水箱液位控制是一个典型的控制问题,常常用于工业和民用领域中的自动化系统。
在许多控制应用中,水箱液位的控制是一个关键的问题,因为它需要根据系统的液位情况来实现稳定的控制。
在模糊控制中,首先需要建立一套模糊规则系统,该系统包括模糊化、模糊推理和解模糊化这三个步骤。
模糊化是将实际输入转换为模糊集合的过程。
在水箱液位控制中,可以将液位分为低、中和高三个模糊集合。
通过将实际液位值映射到这些模糊集合中的一个,来表示液位状态。
模糊推理是根据一组模糊规则,将模糊输入转换为模糊输出的过程。
通过将输入和规则进行匹配,确定输出的模糊集合。
在水箱液位控制中,可以使用如下规则:如果液位低且液位变化小,则控制信号为增大水流量;如果液位高且液位变化大,则控制信号为减小水流量;如果液位中等且液位变化适中,则控制信号为不变。
解模糊化是将模糊输出转换为实际的控制信号的过程。
在水箱液位控制中,可以使用模糊加权平均值的方法来进行解模糊化。
通过将模糊集合和其对应的权重进行加权平均计算,得到最终的控制信号。
在MATLAB中,可以使用Fuzzy Logic Toolbox来实现水箱液位模糊控制仿真设计。
首先需要建立输入和输出的模糊化和解模糊化函数,然后根据实际的模糊规则,构建模糊系统。
最后通过设定输入的模糊值,使用模糊系统进行推理和解模糊,得到最终的控制信号。
总结起来,智能控制及MATLAB实现水箱液位模糊控制仿真设计包括建立模糊规则系统,进行模糊化、模糊推理和解模糊化三个步骤,通过Fuzzy Logic Toolbox来实现模糊控制系统的构建和仿真。
通过利用模糊控制的方法,可以实现水箱液位的自动稳定控制,并提高了控制系统的鲁棒性和适应性。
模糊控制simulink实例模糊控制是一种基于人类智能的控制方法,其能够克服传统控制方法中的困难和不足,使得控制系统能够更加稳定和灵活地进行控制。
在模糊控制中,模糊规则和模糊推理是非常关键的,而Simulink正是一款非常适合模拟和控制系统的MATLAB工具箱。
现在,我们就来看一个基于Simulink的模糊控制实例。
假设我们有一个小车可以沿着一条直线上下运动,并且需要通过模糊控制来控制小车的运动。
我们将小车的速度和位置分别作为系统的输入和输出,其中小车的速度可以在0-10m/s之间变化,而小车的位置则可以在0-50m之间变化。
需要注意的是,在这个系统中,小车的速度和位置都是模糊的,我们需要通过模糊规则和推理来确定小车应该如何移动。
首先,我们需要确定一组模糊规则来描述小车的运动。
这里我们设定了三个模糊规则,分别是:1. 如果小车位置很靠近上限,那么小车速度应该减缓。
2. 如果小车位置中间,那么小车速度应该保持不变。
3. 如果小车位置很靠近下限,那么小车速度应该加速。
然后,我们需要建立一组模糊推理机制来根据当前状态来确定小车的下一个状态。
这里我们选择了三个模糊推理机制:模糊最小性、模糊加法和模糊乘法。
其中,模糊最小性是用来确定模糊集合之间的交集,模糊加法是用来确定两个模糊集合之间的并集,而模糊乘法则是用来确定两个模糊集合之间的乘积。
最后,我们需要使用Simulink建立一个模糊控制系统,并将上述规则和推理机制应用到这个系统中。
在Simulink中,我们可以使用Fuzzy Logic Controller来实现这个过程。
首先,我们需要将输入和输出变量添加到Fuzzy Logic Controller中。
然后,我们需要为每个变量设置一个模糊集合,以便能够将当前状态转换为模糊状态。
接下来,我们需要将模糊规则添加到Fuzzy Logic Controller中,并为每个规则设置一些权重,以便能够决定规则的优先级。

模糊控制系统在机器人智能中的应用教程机器人技术在现代生活中的应用越来越广泛,从工业生产到日常家居,人们都能看到机器人的身影。
而让机器人具备智能的关键之一就是模糊控制系统。
本文将介绍模糊控制系统在机器人智能中的应用,并讲解其原理和实现方法。
一、什么是模糊控制系统?模糊控制系统是一种基于模糊逻辑的控制方法。
它通过将模糊逻辑应用于控制系统中的输入和输出,使得机器人能够根据不确定、模糊的输入情况做出相应的输出响应。
相比于传统的控制方法,模糊控制系统更加灵活和适应性强。
二、模糊控制系统的原理和关键概念1. 模糊集合在模糊控制系统中,模糊集合是一种描述模糊现象的数学工具。
与传统的集合不同,模糊集合可以具有介于0和1之间的隶属度。
例如,在描述一个机器人的速度时,可以用“低速”、“中速”、“高速”三个模糊集合来表示。
2. 模糊规则模糊控制系统的核心是一组模糊规则,它们定义了输入和输出之间的关系。
每条模糊规则由一个条件部分和一个结论部分组成。
条件部分是关于输入的模糊集合,结论部分是关于输出的模糊集合。
通过将输入与条件部分进行匹配,模糊控制系统可以确定输出与结论部分对应。
3. 模糊推理模糊控制系统的推理过程是指根据输入模糊集合和模糊规则,计算出输出模糊集合的过程。
这个过程需要进行模糊逻辑的运算,同时考虑到多个模糊规则之间的冲突和组合。
4. 模糊化和解模糊化模糊化是将确定的输入值映射到对应的模糊集合上,而解模糊化是将模糊集合的隶属度转化为确定的输出值。
这两个过程是模糊控制系统中的关键步骤,决定了输入和输出之间的匹配关系。
三、模糊控制系统在机器人智能中的应用案例1. 机器人路径规划路径规划是机器人导航中的重要问题之一。
传统的路径规划方法通常要求环境的精确描述和精确控制指令,而在实际环境中,这些信息常常是不准确的或模糊的。
模糊控制系统可以通过对环境的感知和建模,将不确定的信息转化为模糊集合,进而进行路径规划和避障操作。
2. 机器人抓取控制机器人抓取控制是指机器人执行抓取动作的过程。
模糊pid控制实例
(原创版)
目录
一、模糊 PID 控制的概述
二、模糊 PID 控制的优势
三、模糊 PID 控制的实例分析
四、模糊 PID 控制的应用前景
正文
一、模糊 PID 控制的概述
模糊 PID 控制是一种基于模糊逻辑理论和 PID 控制理论的控制方法,它将 PID 控制器的精度和模糊控制器的智能化相结合,提高了控制的准确性和灵活性。
模糊 PID 控制主要应用于工业控制领域,如电机控制、温度控制等。
二、模糊 PID 控制的优势
相较于传统 PID 控制,模糊 PID 控制具有以下优势:
1.适应性强:模糊 PID 控制可以根据被控对象的特性进行自适应调整,提高了控制的适应性。
2.智能化程度高:模糊 PID 控制利用模糊逻辑理论,可以对控制对象进行智能化识别和控制,提高了控制的准确性。
3.稳定性好:模糊 PID 控制结合了 PID 控制器的稳定性和模糊控制器的智能化,使得控制系统具有较好的稳定性。
三、模糊 PID 控制的实例分析
以电机控制为例,模糊 PID 控制可以根据电机的负载情况和转速变化,自动调整电机的输出功率,实现精确控制。
在实际应用中,模糊 PID
控制可以根据不同的控制需求进行调整,实现对电机的精确控制。
四、模糊 PID 控制的应用前景
随着工业自动化技术的发展,对控制精度和控制速度的要求越来越高。
模糊 PID 控制作为一款具有高精度、高智能化的控制方法,在工业控制
领域具有广泛的应用前景。
模糊控制应用实例模糊控制在自动驾驶中的应用实例自动驾驶技术是近年来备受关注的热门话题,它的出现旨在解决驾驶过程中的安全问题,并提高驾驶的便利性和舒适度。
而模糊控制作为自动驾驶技术中的重要一环,有着广泛的应用。
本文将以自动驾驶中的模糊控制为例,探讨其应用实例。
在自动驾驶的过程中,模糊控制被用来处理传感器数据,并作出相应的决策。
以自动驾驶汽车的转向控制为例,模糊控制可以根据车辆的位置、速度、前方障碍物等数据,决定车辆的转向角度,以保证车辆在道路上行驶的安全性和稳定性。
模糊控制通过模糊化处理将传感器数据转化为模糊集合。
例如,车辆的位置可以被模糊化为"靠左"、"靠右"、"居中"等模糊集合,车辆的速度可以被模糊化为"缓慢"、"中等"、"快速"等模糊集合。
然后,利用一系列的模糊规则来推导出车辆转向角度的模糊集合。
例如,如果车辆靠左,并且速度较快,那么转向角度可能是"向右转";如果车辆居中,并且速度较慢,那么转向角度可能是"保持直行"。
最后,通过去模糊化处理将模糊集合转化为具体的转向角度。
在自动驾驶中,模糊控制的应用不仅限于转向控制,还包括加速控制、制动控制等。
例如,在车辆的加速控制中,模糊控制可以根据车辆的加速度和前方障碍物的距离,决定车辆的加速度大小,以保证车辆在道路上的安全跟随。
同样,在车辆的制动控制中,模糊控制可以根据车辆的速度和前方障碍物的距离,决定车辆的制动力大小,以保证车辆在紧急情况下的安全停车。
除了在自动驾驶中的应用,模糊控制还广泛应用于其他领域。
例如,在温控系统中,模糊控制可以根据室内温度和设定温度,决定空调的制冷或制热强度,以保持室内的舒适温度。
在机器人的路径规划中,模糊控制可以根据环境的复杂性和机器人的速度,决定机器人的行走路径,以避免障碍物的碰撞。
智能控制实验报告实验题目: 模糊控制器设计学院: 电气工程学院班级:姓名:学号:实验题目: 模糊控制器设计实验目的: 1.熟悉和掌握模糊控制器的结构、原理及应用;2、熟练应用MATLAB软件, 进行模糊控制的Matlab仿真。
实验原理:在Simulink环境下对PID控制系统进行建模:对模糊控制系统的建模关键是对模糊控制器的建模。
Matlab软件提供了一个模糊推理系统(FIS)编辑器, 只要在Matlab命令窗口键入Fuzzy就可进入模糊控制器编辑环境。
模糊推理系统编辑器用于设计和显示模糊推理系统的一些基本信息, 如推理系统的名称, 输入、输出变量的个数与名称,模糊推理系统的类型、解模糊方法等。
实验仪器: 计算机MATLAB软件实验步骤:打开模糊推理系统编辑器, 在MATLAB的命令窗(command window)内键入:fuzzy命令, 弹出模糊推理系统编辑器界面, 如下图所示:在FIS编辑器界面上, 执行菜单命令“Edit”-> “Add Variable”->“Input”, 加入新的输入input, 如下图所示:选择input(选中为红框), 在界面右边文字输入处键入相应的输入名称, 例如温度输入用tmp-input, 磁能输入用mag-input, 如下图所示:双击所选input, 弹出一新界面, 在左下Range处和Display Range处, 填入取值范围, 例如0至9(代表0至90);在右边文字输入Name处, 填写隶属函数的名称, 例如lt或LT(代表低温);在Type处选择trimf(意为: 三角形隶属函数曲线, triangle member function)在Params(参数)处, 选择三角形涵盖的区间, 填写三个数值, 分别为三角形底边的左端点、中点和右端点在横线上的值如下图中所示:用鼠标左键双击输入变量, 弹出输入变量的隶属函数编辑器, 执行菜单命令“Edit”-> “Remove All MFs”, 然后执行菜单命令“Edit”-> “Add MFs”, 弹出“Membership Function”对话框, 将隶属函数的类型设置为“trimf”,并修改隶属函数的数目为3, 如图所示, 单击“OK”按钮返回。