四种常见约束类型的约束反力
- 格式:doc
- 大小:25.50 KB
- 文档页数:3
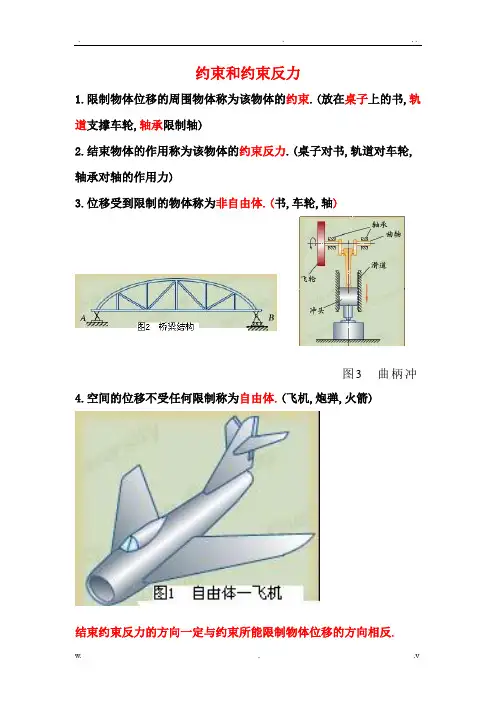
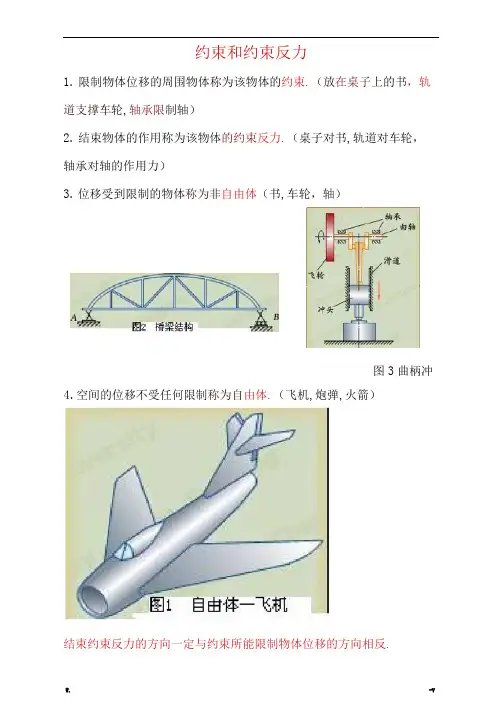
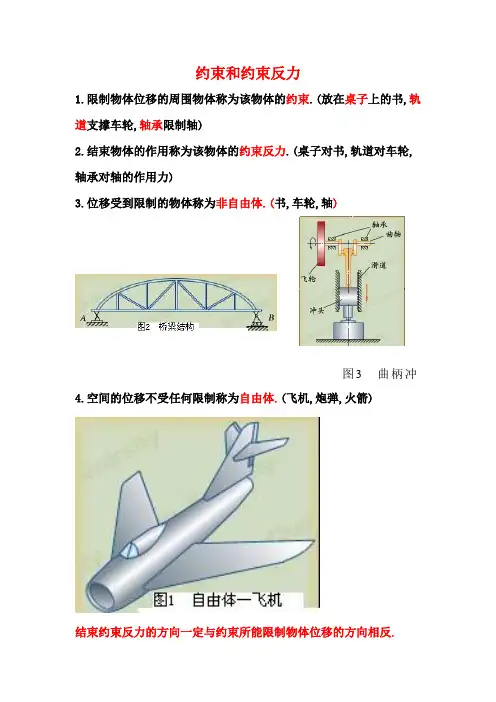
约束和约束反力1.限制物体位移的周围物体称为该物体的约束.(放在桌子上的书,轨道支撑车轮,轴承限制轴)2.结束物体的作用称为该物体的约束反力.(桌子对书,轨道对车轮,轴承对轴的作用力)3.位移受到限制的物体称为非自由体.(书,车轮,轴)4.空间的位移不受任何限制称为自由体.(飞机,炮弹,火箭)结束约束反力的方向一定与约束所能限制物体位移的方向相反.图3 曲柄冲二、几种常见的约束类型1.柔体约束由柔软的绳索、链条或胶带等构成的约束。
由于柔体只能限制物体沿柔体伸长方向运动,故只能承受拉力约束反力特点:作用点在柔体与被约束物体接触处,作用线沿柔体中心方向背离被约束物体。
柔体约束只能承受拉力2.光滑接触表面的约束光滑接触面约束时,不论接触面形状如何,都不能限制物体沿接触面切线方向运动,而只能限制物体沿接触面公法线方向运动图1-19 光滑接触面约束图1-20 齿面约束约束反力的特点:通过接触点,沿接触面公法线方向指向被约束物体3.光滑铰链约束铰链:工程中常见约束,有两个钻有圆孔的构件和圆柱形销子所构成1-销钉2-构件图1-21 铰链约束此类约束只能限制物体在垂直于销钉轴线的平面内移动而不能限制绕销钉转动约束反力的特点当外力作用在垂直销钉轴线的平面内时,约束反力过铰链的中心,指向不定,可以用正交分解的两个分力来表示1)固定铰链支座3.固定部分图1-22 固定铰链支座图1-232)活动铰链支座该约束是在铰链支座与光滑支撑面之间,装有几个辊轴而构成的,又称辊轴支座。
滚动支座的约束性质与光滑面约束相同,其约束反力必垂直于支撑面,且通过铰链中心图1-24 活动铰链支座3)铰链连接(中间铰)若构成铰链的两构件都可绕销钉转动,这种铰链为铰链连接。
其约束反力特点与固定铰支座相同。
用过铰链中心、正交分解的两个反力表示图1-25 铰链约束4)球铰链约束圆球和球壳连接构成球铰链约束。
此类约束限制球心任何方向的位移。
其约束力通过球心,但方向不能确定,通常由三个正交分量表示图1-26 球铰链约束5.固定端约束房屋的凉台、车床的刀具夹持端等,它们既不能转动也不能移动,所以既有三个方向的约束反力,也有三个方向的约束反力偶图1-30 固定端约束在平面中表示为:两个正交分解的反力和一个反力偶图1-31 固定端约束反力6.二力杆(连杆)二力杆:只受两个力作用而处于平衡的杆件约束反力特点:两个力必沿这两个力作用点的连线,指向不定。
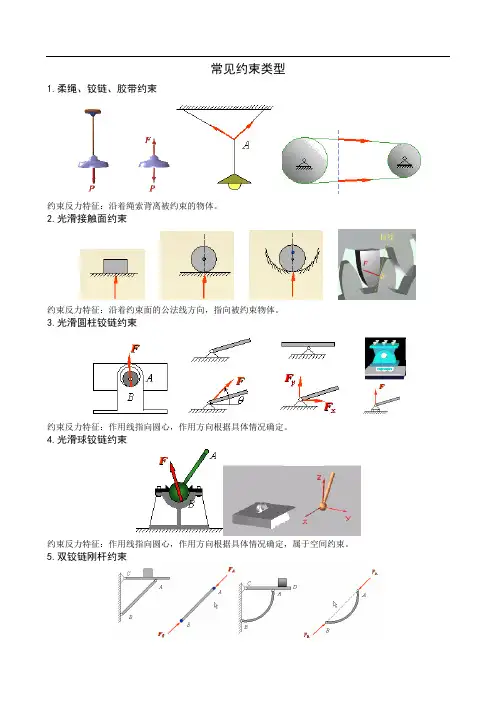
常见约束类型1.柔绳、铰链、胶带约束约束反力特征:沿着绳索背离被约束的物体。
2.光滑接触面约束约束反力特征:沿着约束面的公法线方向,指向被约束物体。
3.光滑圆柱铰链约束约束反力特征:作用线指向圆心,作用方向根据具体情况确定。
4.光滑球铰链约束约束反力特征:作用线指向圆心,作用方向根据具体情况确定,属于空间约束。
5.双铰链刚杆约束约束反力特征:不受任何主动力,属于二力杆受力。
例2-3.如图所示是汽车制动机构的一部分。
司机踩到制动蹬上的力F =212N ,方向与水平面成α=45°。
当平衡时,BE 水平,AD 铅直,试求拉杆所受的力。
已知EA =24cm ,DE =6cm (点E 在铅直线DA 上),又B ,E ,D 都是光滑铰链,机构的自重不计。
解:受力图如上,分别列出x 和y 方向的力学平衡方程如下x 方向的力学平衡方程:0cos cos =--ϕαD B F F Fy 方向的力学平衡方程:0sin sin =-αϕF F D '214 =ϕ,求得:750=B F N例2-4.利用铰车绕过定滑轮B 的绳子吊起一重W =20kN 的货物,滑轮由两端铰链的水平刚杆AB 和斜刚杆BC 支持于B 点。
不计铰车的自重,试求杆AB 和BC 所受的力。
解:取滑轮B (带轴销)为研究对象,受力图见上,分别列出x 和y 方向的平衡方程如下x 方向 030sin 30cos =-+ D BC AB F F Fy 方向 030cos 30sin =-- D BC F W F上式中,20=D F kN ,联合求得6.74=BC F kN ,=AB F -54.5kN (与假设方向相反)思考题:力沿两轴分力的大小和在该两轴上的投影不一定相等,不相等情况如下图。
例2-6.一简支梁AB =d ,作用一力偶,求两支座的约束反力。
解:由于主动力为力偶,因此两支座的约束反力必然构成一个力偶来与M 平衡,故B A F F =,梁AB 的受力图见上,故d M F F B A /==。
四种常见约束反力计算公式常见约束反力计算公式。
在工程力学中,约束反力是指在物体受到外力作用时,由于约束的存在而产生的反作用力。
约束反力的计算是工程力学中的重要内容,它在工程设计和结构分析中起着至关重要的作用。
在本文中,我们将介绍四种常见的约束反力计算公式,分别是平衡方程法、叠加法、虚功原理和位移法。
一、平衡方程法。
平衡方程法是一种常用的计算约束反力的方法,它基于物体在平衡状态下受到的外力和约束反力之间的平衡关系。
平衡方程法的基本原理是根据牛顿第二定律和牛顿第三定律,利用平衡条件和力的平衡方程来计算约束反力。
在实际应用中,可以利用平衡方程法来计算各种约束反力,如支座反力、铰链反力等。
平衡方程法的计算步骤一般包括以下几个步骤,首先,根据物体受到的外力和约束反力的平衡条件,建立平衡方程;然后,根据平衡方程求解约束反力;最后,对求解结果进行验证和分析。
平衡方程法在实际工程中应用广泛,它不仅可以用于计算约束反力,还可以用于计算物体的平衡状态和受力情况。
二、叠加法。
叠加法是一种常用的计算约束反力的方法,它基于力的叠加原理和平衡条件来计算约束反力。
叠加法的基本原理是将物体受到的外力和约束反力分解为若干个简单的力,然后利用力的叠加原理和平衡条件来计算约束反力。
在实际应用中,可以利用叠加法来计算各种约束反力,如支座反力、铰链反力等。
叠加法的计算步骤一般包括以下几个步骤,首先,将物体受到的外力和约束反力分解为若干个简单的力;然后,利用力的叠加原理和平衡条件来计算约束反力;最后,对求解结果进行验证和分析。
叠加法在实际工程中应用广泛,它不仅可以用于计算约束反力,还可以用于计算物体的受力情况和结构分析。
三、虚功原理。
虚功原理是一种常用的计算约束反力的方法,它基于虚功原理和平衡条件来计算约束反力。
虚功原理的基本原理是根据虚位移和虚功的概念,利用虚功原理和平衡条件来计算约束反力。
在实际应用中,可以利用虚功原理来计算各种约束反力,如支座反力、铰链反力等。

理论力学—常见约束类型及约束反力
在理论力学中,一个系统中的物体可能受到各种约束,这些约束可以是完全不可动的,也可以是不完全可动的。
约束的类型决定了如何描述系统的运动,并且会导致约束反力的
出现。
下面是一些常见的约束类型及其约束反力的介绍:
1. 几何约束
几何约束是一种完全不可动的约束,即物体在约束条件下无法发生任何运动。
这种约
束通常表示为位置矢量方程,例如两个物体之间的距离总是保持不变。
对于这种约束,约束反力是沿着约束方向的力,其大小足以保持物体保持在约束条件
下静止或者运动。
例如,如果两个物体被保持在一定距离内,则约束反力将保持这个距离
不变。
2. 绳索约束
绳索约束是一种不完全可动的约束,即物体在约束条件下可以沿着绳索的方向运动,
但是不能穿过绳索。
这种约束通常表示为张力方程,例如绳索的张力总是等于重力或其它
作用力的方向。
3. 平面约束
对于平面约束,约束反力是沿着约束面垂直方向的力,其大小足以保持物体在平面上
运动。
这种力通常称为正压力,由于物体压在约束面上而产生。
4. 万向节约束
万向节约束是一种不完全可动的约束,即物体在约束条件下只能在一个平面内的运动,但是可以在该平面内任意运动。
这种约束通常表示为关节方程,例如人体的臂可以以肩关
节(球形)为支点进行运动。
总的来说,不同类型的约束通常具有不同的约束反力,了解这些约束反力对于解决力
学问题非常重要。
四种常见约束类型的约束反力工程中约束的种类很多,对于一些常见的约束,根据其特性可归纳为下列四种基本类型。
一、柔性约束(柔索)1、组成:由柔性绳索、胶带或链条等柔性物体构成。
2、约束特点:只能受拉,不能受压。
3、约束反力方向:作用在接触点,方向沿着柔体的中心线背离物体。
通常用FT表示。
见图1-8二、光滑面约束(刚性约束)1、组成:由光滑接触面构成的约束。
当两物体接触面之间的摩擦力小到可以忽略不计时,可将接触面视为理想光滑的约束。
2、约束特点:不论接触面是平面或曲面,都不能限制物体沿接触面切线方向的运动,而只能限制物体沿着接触面的公法线指向约束物体方向的运动。
3、约束反力方向:通过接触点,沿着接触面公法线方向,指向被约束的物体,通常用FN表示。
三、光滑圆柱形铰链约束1、组成:两物体分别钻有直径相同的圆柱形孔,用一圆柱形销钉连接起来,在不计摩擦时,即构成光滑圆柱形铰链约束,简称铰链约束。
2、约束特点:这类约束的本质为光滑接触面约束,因其接触点位置未定,故只能确定铰链的约束反力为一通过销钉中心的大小和方向均无法预先确定的未知力。
通常此力就用两个大小未知的正交分力来表示。
如图1-10所示。
3、铰链约束分类:这类约束有连接铰链、固定铰链支座、活动铰链支座等。
(1)连接铰链(中间铰链)约束两构件用圆柱形销钉连接且均不固定,即构成连接铰链,其约束反力用两个正交的分力Fx和Fy表示,2. 固定铰链支座约束如果连接铰链中有一个构件与地基或机架相连,便构成固定铰链支座,其约束反力仍用两个正交的分力Fx和Fy 表示., 如图1-11所示。
固定铰支座的几种表示3.活动铰链支座在桥梁、屋架等工程结构中经常采用这种约束。
在铰链支座的底部安装一排滚轮,可使支座沿固定支承面移动,这种支座的约束性质与光滑面约束反力相同,其约束反力必垂直于支承面,且通过铰链中心。
见图1-12四、固定端约束固定端约束能限制物体沿任何方向的移动,也能限制物体在约束处的转动。
约束和约束反力1.限制物体位移的周围物体称为该物体的约束.(放在桌子上的书,轨道支撑车轮,轴承限制轴)2.结束物体的作用称为该物体的约束反力.(桌子对书,轨道对车轮,轴承对轴的作用力)3.位移受到限制的物体称为非自由体(书,车轮,轴)图3曲柄冲结束约束反力的方向一定与约束所能限制物体位移的方向相反.4.空间的位移不受任何限制称为自由体.(飞机,炮弹,火箭)二、几种常见的约束类型1.柔体约束由柔软的绳索、链条或胶带等构成的约束。
由于柔体只能限制物体沿柔体伸长方向运动,故只能承受拉力约束反力特点:作用点在柔体与被约束物体接触处,作用线沿柔体中心方向背离被约束物体。
柔体约束只能承受拉力2.光滑接触表而的约束光滑接触而约束时,不论接触面形状如何,都不能限制物体沿接触而切线方向运动,而只能限制物体沿接触而公法线方向运动图1-19光滑接触而约束图1-20齿面约束约束反力的特点:通过接触点,沿接触而公法线方向指向被约束物体3.光滑较链约束较链:工程中常见约束,有两个钻有圆孔的构件和圆柱形销子所构成1-销钉2-构件图1-21较链约束此类约束只能限制物体在垂直于销钉轴线的平而内移动而不能限制绕销钉转动约束反力的特点当外力作用在垂直销钉轴线的平面内时,约束反力过较链的中心,指向不定,可以用正交分解的两个分力来表示1)固定较链支座3.固定部分图1-22固定较链支座图 1-232)活动较链支座该约束是在较链支座与光滑支撑而之间,装有几个馄轴而构成的,又称辘轴支座。
滚动支座的约束性质与光滑而约束相同,其约束反力必垂直于支撑面,且通过较链中心图1-24活动较链支座3)较链连接(中间较)若构成较链的两构件都可绕销钉转动,这种较链为较链连接。
其约束反力特点与固定较支座相同。
用过较链中心、正交分解的两个反力表示图1-25较链约束4)球较链约束圆球和球壳连接构成球较链约束。
此类约束限制球心任何方向的位移。
其约束力通过球心,但方向不能确定,通常由三个正交分量表示5.固定端约束房屋的凉台、车床的刀具夹持端等,它们既不能转动也不能移动, 所以既有三个方向的约束反力,也有三个方向的约束反力偶图1-31固定端约束反力(a) (b) (c)图1-26球较链约束U) (b)在平而中表示为:两个正交分解的反力和一个反力偶6.二力杆(连杆)二力杆:只受两个力作用而处于平衡的杆件约束反力特点:两个力必沿这两个力作用点的连线,指向不定。
约束和约束反力1.限制物体位移的周围物体称为该物体的约束.(放在桌子上的书,轨道支撑车轮,轴承限制轴)2.结束物体的作用称为该物体的约束反力.(桌子对书,轨道对车轮,轴承对轴的作用力)3.位移受到限制的物体称为非自由体.(书,车轮,轴)4.空间的位移不受任何限制称为自由体.(飞机,炮弹,火箭)结束约束反力的方向一定与约束所能限制物体位移的方向相反.图3 曲柄冲二、几种常见的约束类型1.柔体约束由柔软的绳索、链条或胶带等构成的约束。
由于柔体只能限制物体沿柔体伸长方向运动,故只能承受拉力约束反力特点:作用点在柔体与被约束物体接触处,作用线沿柔体中心方向背离被约束物体。
柔体约束只能承受拉力2.光滑接触表面的约束光滑接触面约束时,不论接触面形状如何,都不能限制物体沿接触面切线方向运动,而只能限制物体沿接触面公法线方向运动图1-19 光滑接触面约束图1-20 齿面约束约束反力的特点:通过接触点,沿接触面公法线方向指向被约束物体3.光滑铰链约束铰链:工程中常见约束,有两个钻有圆孔的构件和圆柱形销子所构成1-销钉2-构件图1-21 铰链约束此类约束只能限制物体在垂直于销钉轴线的平面内移动而不能限制绕销钉转动约束反力的特点当外力作用在垂直销钉轴线的平面内时,约束反力过铰链的中心,指向不定,可以用正交分解的两个分力来表示1)固定铰链支座3.固定部分图1-22 固定铰链支座图1-232)活动铰链支座该约束是在铰链支座与光滑支撑面之间,装有几个辊轴而构成的,又称辊轴支座。
滚动支座的约束性质与光滑面约束相同,其约束反力必垂直于支撑面,且通过铰链中心图1-24 活动铰链支座3)铰链连接(中间铰)若构成铰链的两构件都可绕销钉转动,这种铰链为铰链连接。
其约束反力特点与固定铰支座相同。
用过铰链中心、正交分解的两个反力表示图1-25 铰链约束4)球铰链约束圆球和球壳连接构成球铰链约束。
此类约束限制球心任何方向的位移。
其约束力通过球心,但方向不能确定,通常由三个正交分量表示图1-26 球铰链约束5.固定端约束房屋的凉台、车床的刀具夹持端等,它们既不能转动也不能移动,所以既有三个方向的约束反力,也有三个方向的约束反力偶图1-30 固定端约束在平面中表示为:两个正交分解的反力和一个反力偶图1-31 固定端约束反力6.二力杆(连杆)二力杆:只受两个力作用而处于平衡的杆件约束反力特点:两个力必沿这两个力作用点的连线,指向不定。
四种常见约束类型的约束反力工程中约束的种类很多,对于一些常见的约束,根据其特性可归纳为下列四种基本类型。
一、柔性约束(柔索)1、组成:由柔性绳索、胶带或链条等柔性物体构成。
2、约束特点:只能受拉,不能受压。
3、约束反力方向:作用在接触点,方向沿着柔体的中心线背离物体。
通常用FT表示。
见图1-8二、光滑面约束(刚性约束)1、组成:由光滑接触面构成的约束。
当两物体接触面之间的摩擦力小到可以忽略不计时,可将接触面视为理想光滑的约束。
2、约束特点:不论接触面是平面或曲面,都不能限制物体沿接触面切线方向的运动,而只能限制物体沿着接触面的公法线指向约束物体方向的运动。
3、约束反力方向:通过接触点,沿着接触面公法线方向,指向被约束的物体,通常用FN表示。
三、光滑圆柱形铰链约束1、组成:两物体分别钻有直径相同的圆柱形孔,用一圆柱形销钉连接起来,在不计摩擦时,即构成光滑圆柱形铰链约束,简称铰链约束。
2、约束特点:这类约束的本质为光滑接触面约束,因其接触点位置未定,故只能确定铰链的约束反力为一通过销钉中心的大小和方向均无法预先确定的未知力。
通常此力就用两个大小未知的正交分力来表示。
如图1-10所示。
3、铰链约束分类:这类约束有连接铰链、固定铰链支座、活动铰链支座等。
(1)连接铰链(中间铰链)约束两构件用圆柱形销钉连接且均不固定,即构成连接铰链,其约束反力用两个正交的分力Fx和Fy表示,2. 固定铰链支座约束如果连接铰链中有一个构件与地基或机架相连,便构成固定铰链支座,其约束反力仍用两个正交的分力Fx和Fy 表示., 如图1-11所示。
固定铰支座的几种表示3.活动铰链支座在桥梁、屋架等工程结构中经常采用这种约束。
在铰链支座的底部安装一排滚轮,可使支座沿固定支承面移动,这种支座的约束性质与光滑面约束反力相同,其约束反力必垂直于支承面,且通过铰链中心。
见图1-12四、固定端约束固定端约束能限制物体沿任何方向的移动,也能限制物体在约束处的转动。
四种常见约束类型的约束反力
工程中约束的种类很多,对于一些常见的约束,根据其特性可归纳为下列四种基本类型。
一、柔性约束(柔索)
1、组成:由柔性绳索、胶带或链条等柔性物体构成。
2、约束特点:只能受拉,不能受压。
3、约束反力方向:作用在接触点,方向沿着柔体的中心线背离物体。
通常用FT表示。
见图1-8
二、光滑面约束(刚性约束)
1、组成:由光滑接触面构成的约束。
当两物体接触面之间的摩擦力小到可以忽略不计时,可将接触面视为理想光滑的约束。
2、约束特点:不论接触面是平面或曲面,都不能限制物体沿接触面切线方向的运动,而只能限制物体沿着接触面的公法线指向约束物体方向的运动。
3、约束反力方向:通过接触点,沿着接触面公法线方向,指向被约束的物体,通常用FN表示。
三、光滑圆柱形铰链约束
1、组成:两物体分别钻有直径相同的圆柱形孔,用一圆柱形销钉连接起来,在不计摩擦时,即构成光滑圆柱形铰链约束,简称铰链约束。
2、约束特点:这类约束的本质为光滑接触面约束,因其接触点位置未定,故只能确定铰链的约束反力为一通过销钉中心的大小和方向均无法预先确定的未知力。
通常此力就用两个大小未知的正交分力来表示。
如图1-10所示。
3、铰链约束分类:这类约束有连接铰链、固定铰链支座、活动铰链支座等。
(1)连接铰链(中间铰链)约束
两构件用圆柱形销钉连接且均不固定,即构成连接铰链,其约束反力用两个正交的分力Fx和Fy表示,
2. 固定铰链支座约束
如果连接铰链中有一个构件与地基或机架相连,便构成固定铰链支座,其约束反力仍用两个正交的分力Fx和Fy 表示., 如图1-11所示。
固定铰支座的几种表示
3.活动铰链支座
在桥梁、屋架等工程结构中经常采用这种约束。
在铰链支座的底部安装一排滚轮,可使支座沿固定支承面移动,这种支座的约束性质与光滑面约束反力相同,其约束反力必垂直于支承面,且通过铰链中心。
见图1-12
四、固定端约束
固定端约束能限制物体沿任何方向的移动,也能限制物体在约束处的转动。
所以,固定端A处的约束反力可用两个正交的分力FAX、FAY和力矩为MA的力偶表示。
见图1-13。