自动控制理论_19开环对数频率特性曲线的绘制
- 格式:ppt
- 大小:1.10 MB
- 文档页数:38
绘制开环对数幅频特性曲线
在控制系统的分析与设计中,开环传递函数是一个重要的概念。
开环传递函数可以反映系统的频率响应特性,为系统的调节与控制提供重要的依据。
本文将以某系统的开环传递函数为例,介绍如何绘制开环对数幅频特性曲线。
开环传递函数是指系统的输出与输入之间的函数关系。
在频率域中,它可以表示为H(jω),其中ω 是角频率。
对数幅频特性曲线是将开环传递函数的幅值以对数形式绘制的曲线,表示系统在不同频率下的幅值响应。
绘制对数幅频特性曲线的步骤如下:
计算开环传递函数的幅值:H(jω) = |H(jω)|
设定横坐标的范围和刻度,并按照要求选择合适的频率单位。
将开环传递函数的幅值用对数形式表示,即y = log |H(jω)|。
绘制曲线,并观察系统在不同频率下的幅值响应。
绘制完成后,我们就可以通过观察对数幅频特性曲线来了解系统的频率响应特性。
例如,当频率单位为赫兹时,如果对数幅频特性曲线呈现出典型的高通特性,即随着频率的增大,幅值也随之增大,那么这意味着系统在高频时更加灵敏。
如果对数幅频特性曲线呈现出典
型的低通特性,即随着频率的增大,幅值减小,那么这意味着系统在低频时更加稳定。
绘制开环对数幅频特性曲线是了解系统频率响应特性的重要方法。
通过观察对数幅频特性曲线,我们可以了解系统在不同频率下的幅值响应,为系统的调节与控制提供重要的依据。
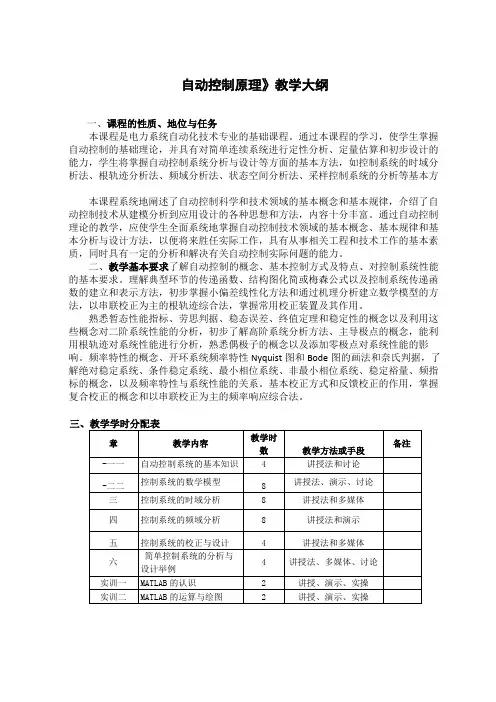
自动控制原理》教学大纲一、课程的性质、地位与任务本课程是电力系统自动化技术专业的基础课程。
通过本课程的学习,使学生掌握自动控制的基础理论,并具有对简单连续系统进行定性分析、定量估算和初步设计的能力,学生将掌握自动控制系统分析与设计等方面的基本方法,如控制系统的时域分析法、根轨迹分析法、频域分析法、状态空间分析法、采样控制系统的分析等基本方本课程系统地阐述了自动控制科学和技术领域的基本概念和基本规律,介绍了自动控制技术从建模分析到应用设计的各种思想和方法,内容十分丰富。
通过自动控制理论的教学,应使学生全面系统地掌握自动控制技术领域的基本概念、基本规律和基本分析与设计方法,以便将来胜任实际工作,具有从事相关工程和技术工作的基本素质,同时具有一定的分析和解决有关自动控制实际问题的能力。
二、教学基本要求了解自动控制的概念、基本控制方式及特点、对控制系统性能的基本要求。
理解典型环节的传递函数、结构图化简或梅森公式以及控制系统传递函数的建立和表示方法,初步掌握小偏差线性化方法和通过机理分析建立数学模型的方法,以串联校正为主的根轨迹综合法,掌握常用校正装置及其作用。
熟悉暂态性能指标、劳思判据、稳态误差、终值定理和稳定性的概念以及利用这些概念对二阶系统性能的分析,初步了解高阶系统分析方法、主导极点的概念,能利用根轨迹对系统性能进行分析,熟悉偶极子的概念以及添加零极点对系统性能的影响。
频率特性的概念、开环系统频率特性Nyquist图和Bode图的画法和奈氏判据,了解绝对稳定系统、条件稳定系统、最小相位系统、非最小相位系统、稳定裕量、频指标的概念,以及频率特性与系统性能的关系。
基本校正方式和反馈校正的作用,掌握复合校正的概念和以串联校正为主的频率响应综合法。
三、教学学时分配表四、教学内容与学时安排第一章自动控制系统的基本知识……4学时本章教学目的和要求:掌握自动控制系统组成结构和基本要素,理解自动控制的基本控制方式和对系统的性能要求,了解一些实际自动控制系统的控制原理。
Automatic Control Theory自动控制理论第四章 线性系统的根轨迹法根轨迹法是一种图解方法,它是经典控制理论中对系统进行分析和综合的基本方法之一。
由于根轨迹图直观地描述了系统特征方程的根(即系统的闭环极点)在s 平面上的分布,因此,用根轨迹法分析自动控制系统十分方便,特别是对于高阶系统和多回路系统,应用根轨迹法比用其他方法更为方便,因此在工程实践中获得了广泛应用。
1、根轨迹的基本概念闭环系统的稳定性取决于闭环系统的极点分布,其它性能取决于其零极点分布。
因此,可以用系统的零极点分布来间接研究控制系统的性能。
伊万思在1948年提出了一种在复平面上由开环零极点确定闭环零极点的图解方法——根轨迹法。
将开环系统的某一个参数(比如开环放大系数)的全部值与闭环特征根的关系表示在一张图上。
根轨迹定义开环系统传递函数的某一个参数从零变到无穷时,闭环系统特征方程的根在复平面上变化的轨迹。
研究根轨迹的目的:分析系统的各种性能(稳定性、动态和稳态性能) 相关术语:*01210121()()()()()()()()()()mim i nn jj s z b s z s z s z G s H s K a s p s p s p s p ==----==----∏∏❖ 开环零点:指系统开环传递函数中分子多项式方程的根 ❖ 开环极点:指系统开环传递函数中分母多项式方程的根 ❖ 根轨迹增益:K *为开环系统根轨迹增益❖ 闭环零点:指系统闭环传递函数中分子多项式方程的根 ❖闭环极点:指系统闭环传递函数中分母多项式方程的根1*11()()()()1()()()()nj j n mjij i G s s p G s s G s H s s p K s z ===-Φ==+-+-∏∏∏闭环零点由前向通道的零点和反馈通道的极点构成。
对于单位反馈系统,闭环零点就是开环零点。
闭环极点与开环零、极点以及根轨迹增益K*均有关。
目录第一章自动控制系统的基本原理第一节控制系统的工作原理和基本要求第二节控制系统的基本类型第三节典型控制信号第四节控制理论的内容和方法第二章控制系统的数学模型第一节机械系统的数学模型第二节液压系统的数学模型第三节电气系统的数学模型第四节线性控制系统的卷积关系式第三章拉氏变换第一节傅氏变换第二节拉普拉斯变换第三节拉普拉斯变换的基本定理第四节拉普拉斯逆变换第四章传递函数第一节传递函数的概念与性质第二节线性控制系统的典型环节第三节系统框图及其运算第四节多变量系统的传递函数第五章时间响应分析第一节概述第二节单位脉冲输入的时间响应第三节单位阶跃输入的时间响应第四节高阶系统时间响应第六章频率响应分析第一节谐和输入系统的定态响应第二节频率特性极坐标图第三节频率特性的对数坐标图第四节由频率特性的实验曲线求系统传递函数第七章控制系统的稳定性第一节稳定性概念第二节劳斯判据第三节乃奎斯特判据第四节对数坐标图的稳定性判据第八章控制系统的偏差第一节控制系统的偏差概念第二节输入引起的定态偏差第三节输入引起的动态偏差第九章控制系统的设计和校正第一节综述第二节希望对数幅频特性曲线的绘制第三节校正方法与校正环节第四节控制系统的增益调整第五节控制系统的串联校正第六节控制系统的局部反馈校正第七节控制系统的顺馈校正第一章自动控制系统的基本原理定义:在没有人的直接参与下,利用控制器使控制对象的某一物理量准确地按照预期的规律运行。
第一节控制系统的工作原理和基本要求一、控制系统举例与结构方框图例1.一个人工控制的恒温箱,希望的炉水温度为100C°,利用表示函数功能的方块、信号线,画出结构方块图。
图1人通过眼睛观察温度计来获得炉内实际温度,通过大脑分析、比较,利用手和锹上煤炭助燃。
比较图2例2.图示为液面高度控制系统原理图。
试画出控制系统方块图和相应的人工操纵的液面控制系统方块图。
解:浮子作为液面高度的反馈物,自动控制器通过比较实际的液面高度与希望的液面高度,调解气动阀门的开合度,对误差进行修正,可保持液面高度稳定。
《自动控制原理》教学大纲一、课程的性质、地位与任务本课程是电力系统自动化技术专业的基础课程。
通过本课程的学习,使学生掌握自动控制的基础理论,并具有对简单连续系统进行定性分析、定量估算和初步设计的能力,学生将掌握自动控制系统分析与设计等方面的基本方法,如控制系统的时域分析法、根轨迹分析法、频域分析法、状态空间分析法、采样控制系统的分析等基本方法等。
本课程系统地阐述了自动控制科学和技术领域的基本概念和基本规律,介绍了自动控制技术从建模分析到应用设计的各种思想和方法,内容十分丰富。
通过自动控制理论的教学,应使学生全面系统地掌握自动控制技术领域的基本概念、基本规律和基本分析与设计方法,以便将来胜任实际工作,具有从事相关工程和技术工作的基本素质,同时具有一定的分析和解决有关自动控制实际问题的能力。
二、教学基本要求了解自动控制的概念、基本控制方式及特点、对控制系统性能的基本要求。
理解典型环节的传递函数、结构图化简或梅森公式以及控制系统传递函数的建立和表示方法,初步掌握小偏差线性化方法和通过机理分析建立数学模型的方法,以串联校正为主的根轨迹综合法,掌握常用校正装置及其作用。
熟悉暂态性能指标、劳思判据、稳态误差、终值定理和稳定性的概念以及利用这些概念对二阶系统性能的分析,初步了解高阶系统分析方法、主导极点的概念,能利用根轨迹对系统性能进行分析,熟悉偶极子的概念以及添加零极点对系统性能的影响。
频率特性的概念、开环系统频率特性Nyquist图和Bode图的画法和奈氏判据,了解绝对稳定系统、条件稳定系统、最小相位系统、非最小相位系统、稳定裕量、频指标的概念,以及频率特性与系统性能的关系。
基本校正方式和反馈校正的作用,掌握复合校正的概念和以串联校正为主的频率响应综合法。
四、教学内容与学时安排第一章自动控制系统的基本知识……4学时本章教学目的和要求:掌握自动控制系统组成结构和基本要素,理解自动控制的基本控制方式和对系统的性能要求,了解一些实际自动控制系统的控制原理。
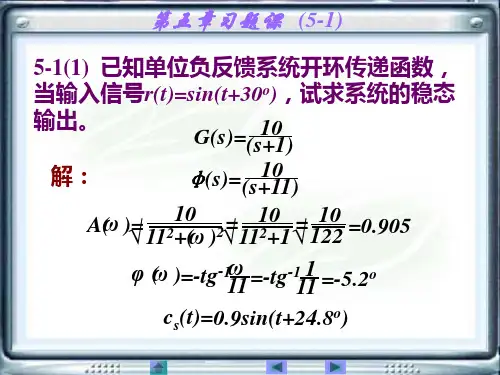
5-1设单位负反馈系统的开环传递函数110)(+=s s G ,当把下列输入信号作用在闭环系统输入端时,试求系统的稳态输出。
(1))30sin()( +=t t r(2) )452cos(2)( -=t t r计算的最后结果:(1)) 83.24sin(905.0)(+=t t c ;(2)) 3.532cos(785.1)(-=t t c ;5-2设控制系统的开环传递函数如下,试绘制各系统的开环幅相频率特性曲线和开环对数频率特性曲线。
(1))15)(5(750)(++=s s s s G (2))1110)(1(200)(2++=s s s s G (3))18)(12(10)(++=s s s G (4))1008()1(1000)(2+++=s s s s s G (5))1(10)(-=s s s G (6)13110)(++=s s s G (7))15)(1.0()2.0(10)(2+++=s s s s s G (8)13110)(+-=s s s G 绘制各系统的开环幅相频率特性曲线:绘制各系统的开环对数频率特性曲线:5-3已知电路如图所示,设R 1=19k Ω,R 2=1 k Ω,C=10μF 。
试求该系统传递函数,并作出该系统的伯德图。
计算的最后结果:19.0,2.0)(,1)(1221112===+=+=c R T c R R T s T s T s G ; 5-4已知一些最小相位系统的对数幅频特性曲线如图所示,试写出它们的传递函数(并粗略地画出各传递函数所对应的对数相频特性曲线)。
计算的最后结果数字:(a) 11010)(+=s s G (b) 101)(s s G +=; (c) )1100)(101.0(100)(++=s s s s G ; (d) )1100)(110)(1(250)(+++=s s s s G ;(e) 3.0,3.50,]12)[(100)(2==++=ξωωξωn nn s ss s G 5-6画出下列给定传递函数的极坐标图。
第五章5-1 已知单位反馈系统的开环传递函数,试绘制其开环频率特性的极坐标图(1)解:幅频特性:相频特性:列表取点并计算。
0.5 1.0 1.5 2.0 5.010.01.790.7070.370.2240.0390.0095-116.6-135-146.3-153.4-168.7-174.2系统的极坐标图如下:(2)解:幅频特性:相频特性:列表取点并计算。
00.20.50.8 1.0 2.0 5.010.910.630.4140.3170.1720.01950-15.6-71.6-96.7-108.4-139.4-162.96系统的极坐标图如下:(3)解:幅频特性:相频特性:列表取点并计算。
0.20.30.51254.55 2.74 1.270.3170.0540.0039-105.6-137.6-161-198.4-229.4-253系统的极坐标图如下:(4)解:幅频特性:相频特性:列表取点并计算。
0.20.250.30.50.60.8122.7513.87.86 2.520.530.650.317-195.6-220.6-227.6-251.6-261.6-276.7-288.4系统的极坐标图如下:5-2 试绘制上题中各系统的开环对数频率特性(伯德图)。
(1)解:系统为Ⅰ型,伯德图起始斜率为-20dB/dec,在处与=20=0相交。
环节的交接频率,斜率下降20dB/dec,变为-40dB/de c。
系统的伯德图如图所示:(2)解:伯德图起始为0dB线,的交接频率,斜率下降20dB/dec,变为-20dB/de c。
的交接频率,斜率下降20dB/dec,变为-40dB/de c。
系统的伯德图如图所示。
(3)解:系统为Ⅰ型,伯德图起始斜率为-20dB/dec,其延长线在=1处与=20=0相交。
的交接频率,斜率下降20dB/dec,变为-40dB/de c。
的交接频率,斜率下降20dB/dec,变为-60dB/de c。