第六章 多机系统
- 格式:ppt
- 大小:384.50 KB
- 文档页数:53
第六章机电一体化机电一体化(Mechatronik)是由机械(Mechanik)和电子(Elektronik)构成的合成词。
其中,电子代表“硬件”和“软件”;机械是“机械”和“液压”方法的总称。
它不是简单的通过“电子化”替代机械装置,而是与全面的角度看问题和设计方法学有关。
其目标是对机械、电子硬件和软件进行整体优化,从而在低成本、低重量、小空间且高质量的情况下实现更多功能。
在解决问题的过程中,能否将如今已被分离的学科作为一个整体进行观察,对机电一体化方式是否成功起决定性作用。
第一节机电一体化系统及其组成部件1.1 应用如今机电一体化系统及其组成部件几乎布满在整个车辆系统中:从发动机管理、汽油机和柴油机电喷,到变速箱控制,电热能量管理,直到不同的制动-驱动力控制系统。
此外还有满足不同控制需求的通信和信息系统。
除系统及其组成部件层面外,机电一体化还在微机械领域中扮演着越来越重要的角色。
1.2系统级实例为了实现车辆全自动导向和转向,系统的进一步开发呈现出一个通用趋势:即机械系统在未来将越来越多地被线控(X by Wire)系统所代替。
“Drive by wire”(线控驱动),即电子油门,就是一个已经实际运用的例子。
“线控制动系统”省去了制动踏板和车轮制动器间的机械-液压连接。
传感器获取驾驶员刹车指令,并把这一信息传给电控单元。
控制单元通过相应的执行机构在车轮处产生所需的制动作用。
“线控制动系统”的一种可能实现形式为电动液压制动(SBC,测控一体化制动控制)。
在实施制动时或者在通过电子稳定程序ESP进行稳定性干预时,SBC控制器计算出每个车轮上期望的理想制动压力。
由于每个车轮所需的理想制动压力单独计算,且每个车轮的实际制动力独立获取,所以能通过轮压调节器对每个车轮的制动压力进行独立调节。
这四个压力调节器各由一个输入和输出阀组成,由控制器的驱动电路控制,相互配合,从而获得最佳的制动压力闭环调节。
在共轨系统中,压力生成和喷射是解耦的。
第六章 机器人运动学及动力学6.1 引论到现在为止我们对操作机的研究集中在仅考虑动力学上。
我们研究了静力位置、静力和速度,但我们从未考虑过产生运动所需的力。
本章中我们考虑操作机的运动方程式——由于促动器所施加的扭矩或作用在机械手上的外力所产生的操作机的运动之情况。
机构动力学是一个已经写出很多专著的领域。
的确,人们可以花费以年计的时间来研究这个领域。
显然,我们不可能包括它所应有的完整的内容。
但是,某种动力学问题的方程式似乎特别适合于操作机的应用。
特别是,那种能利用操作机的串联链性质的方法是我们研究的天然候选者。
有两个与操作机动力学有关的问题我们打算去解决。
向前的动力学问题是计算在施加一组关节扭矩时机构将怎样运动。
也就是,已知扭矩矢量τ,计算产生的操作机的运动Θ、Θ和Θ。
这个对操作机仿真有用,在逆运动学问题中,我们已知轨迹点Θ、Θ和Θ,我们欲求出所需要的关节扭矩矢量τ。
这种形式的动力学对操作机的控制问题有用。
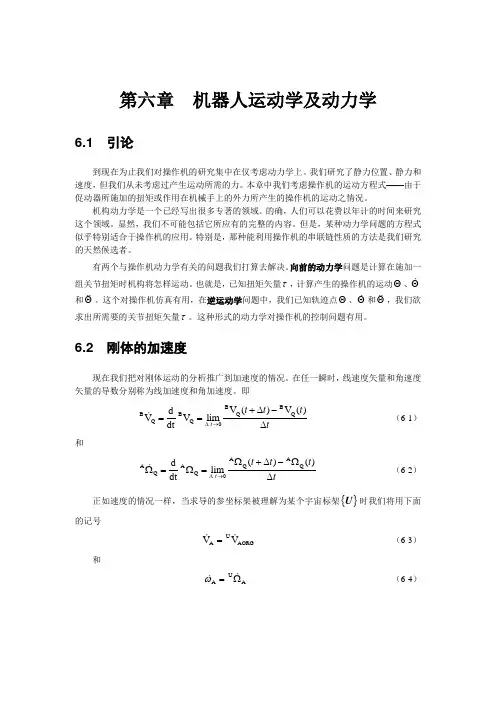
6.2 刚体的加速度现在我们把对刚体运动的分析推广到加速度的情况。
在任一瞬时,线速度矢量和角速度矢量的导数分别称为线加速度和角加速度。
即BB Q Q BBQ Q 0V ()V ()d V V lim dt t t t t t∆→+∆-==∆ (6-1)和AA Q Q AAQ Q 0()()d lim dt t t t t t∆→Ω+∆-ΩΩ=Ω=∆ (6-2)正如速度的情况一样,当求导的参坐标架被理解为某个宇宙标架{}U 时我们将用下面的记号U A AORG V V = (6-3)和U A A ω=Ω (6-4)6.2.1 线加速度我们从描述当原点重合时从坐标架{}A 看到的矢量BQ 的速度AA B A A Q B Q B B V V BR R Q =+Ω⨯ (6-5)这个方程的左手边描述AQ 如何随时间而变化。
所以,因为原点是重合的,我们可以重写(6-5)为A AB A A B B Q B B d ()V dtB B R Q R R Q =+Ω⨯ (6-6) 这种形式的方程式当推导对应的加速度方程时特别有用。
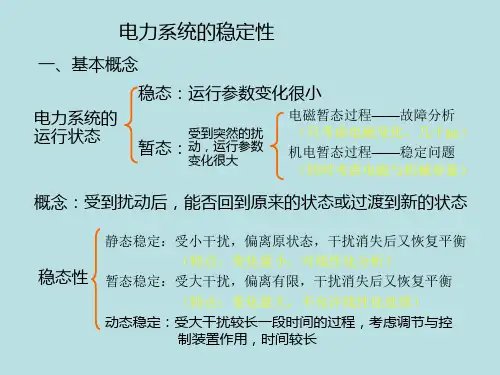
第六章 电力系统静态稳定第一节 概述一、运动系统稳定性的一般定义运动系统都存在稳定性问题。
定义如下:一个运动系统处于平衡状态,若遭受某种扰动,经过一定的时间变化后,能恢复到原有平衡状态或新的平衡状态下运行,则称该运动系统是稳定的,否则是不稳定的。
【例6-1】b二、电力系统稳定性的特定含义电力系统中发电机都是同步发电机,电力系统的平衡状态是指所有发电机以同步(相同)速度运行。
当电力系统处于某种平衡状态(即发电机以相同速度)运行,遭受某种扰动后,发电机的速度发生变化,经历一定时间速度的变化,若所有发电机能恢复到同步(相同)速度下运行,则该系统是稳定的,否则是不稳定的。
在正常运行时(平衡状态),发电机输入机械功率T P 等于发电机发出的电磁功率E P (机械损耗很小,因此忽略不计),即E T P P =,发电机保持恒定速度运行。
当受到某种扰动(例如:负荷波动,导线发热、电阻变化、短路、切除线路等),发电机输出功率E P 要发生变化,但T P 不能跟随变化(因为调速系统由机械组成,不能瞬间完成),导致输入与输出功率不平衡,从而引起速度的变化。
受扰动各发电机E P 变化不一样,因此各发电机速度变化不一样,经过一段时间调整,若能够恢复到相同速度下运行,则系统是稳定的,否则是不稳定的。
三、电力系统稳定性的分类按扰动量的大小,电力系统稳定分为⎩⎨⎧大扰动下的稳定—暂态稳定小扰动下的稳定—静态稳定小扰动—如负荷正常变化、导线发热引起参数变化等。
其扰动量很小,因而可以对描述系统运动过程的非线性微分方程进行线性化处理,从而可用线性系统稳定性理论进行分析。
大扰动—如短路、切机、投切线路、投切变压器等。
其扰动量大,因而不能对描述系统运动过程的非线性微分方程进行线性化处理,从而只能用非线性系统稳定性理论进行分析。
四、如何判别稳定1. 以速度,即各机组频率。
2. 以相对转子位置角)(ij t δ的变化过程,即摇摆曲线。
若)(ij t δ能够回复到某一个稳定值则系统是稳定的。
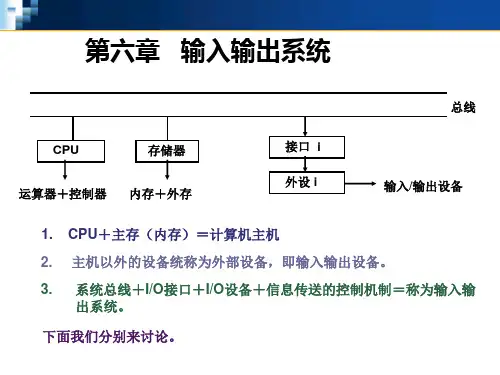
第六章输入输出系统1、通过硬件和软件的功能扩充,把原来独占的设备改造成若干用户共享的设备,这种设备称为()。
A、存储设备B、系统设备C、虚拟设备D、用户设备2、CPU输出数据的速度远远高于打印机的打印速度,为解决这一矛盾,可采用()。
A、并行技术 B.通道技术C、缓冲技术D、虚存技术3、为了使多个进程能有效的同时处理I/O,最好使用()结构的缓冲技术。
A、缓冲池B、单缓冲区C、双缓冲区D、循环缓冲区4、磁盘属于①(),信息的存取是以②()单位进行的,磁盘的I/O控制主要采取③()方式,打印机的I/O控制主要采取③()方式。
①A、字符设备 B、独占设备 C、块设备D、虚存设备②A、位(bit) B、字节C、桢D、固定数据块③A、循环测试 B、程序中断 C、DMA D、SPOOLing5、下面关于设备属性的论述中正确的为()。
A、字符设备的一个基本特征是不可寻址的,即能指定输入时的源地址和输出时的目标地址B、共享设备必须是可寻址的和可随机访问的设备C、共享设备是指在同一时刻内,允许多个进程同时访问的设备D、在分配共享设备和独占设备时,都可能引起进程死锁6、下面关于虚拟设备的论述中,正确的是()。
A、虚拟设备是指允许用户使用比系统中具有的物理设备更多的设备B、虚拟设备是指把一个物理设备变成多个对应的逻辑设备C、虚拟设备是指允许用户以标准化方式来使用物理设备D、虚拟设备是指允许用户程序不必全部装入内存便可使用系统中的设备7、通道是一种特殊①(),具有②()能力,它用于实现③()之间的信息传输。
①A、I/O设备B、设备控制器C、处理机D、I/O控制器②A、执行I/O指令集 B、执行CPU指令集C、传输I/O指令D、运行I/O进程③A、内存与外设B、CPU与外设C、内存与外存D、CPU与外存8、为实现设备分配,应为每类设备设置一张①(),在系统中配置一张①(),为实现设备的独立性,系统中应设置一张②()。
①A、设备控制表B、控制器控制表C、系统设备表D、设备分配表②A、设备开关表B、I/O请求表C、系统设备表D、逻辑设备表9、下面不适合于磁盘调度算法的是()。
电力系统稳定第四版答案方万良第六章
一、单相接地、两相短路、两相短路接地、三相短路这几种短路类型中,哪种短路对电力系统的暂态稳定性影响最大?为什么?
答:三相短路的暂态稳定极限随时间降低的最快,干扰越大时间越久,暂态稳定极限越低,系统暂态稳定性越低
二、发电机采用模型3时,构造多机系统线性化状态方程有哪些步骤?
⑴确定待分析的电力系统某一运行方式并作潮流计算,算出系统各节点的电压相量和各发电机输出功率
⑵根据给定的节点负荷功率和对应的节点电压,求出代替负荷功率的导纳
⑶列出线性化方程式
⑷列出网络方程式
⑸坐标变换
⑹修正网络方程式
⑺初值计算
⑻系统状态方程
三、发电机采用模型时,构造多机系统线性化状态方程有哪些步骤?
⑴确定待分析的电力系统某一运行方式并作潮流计算,算出系统各节点的电压相量和各发电机输出功率。
⑵根据给定的节点负荷功率和对应的节点电压,求出代替负荷功率的导纳。
⑶修正网络方程
⑷消去联络节点
⑸发电机电磁功率表达式
⑹系统状态方程
⑺系统线性化状态。
安徽省应用型本科对口升学要求(信息技术类)多媒体软件应用试题精编模拟训练1.一个完整的多媒体系统由多媒体硬件系统和多媒体软件系统两部分构成。
2常见的多媒体输出设备有打印机、投影仪等。
3常见的多媒体输人设备有数码摄像机、扫描仪、刻录机、麦克风、数码相机、摄像头、录音笔、等4多媒体在计算机信息领域中泛指一切信息载体,如文字、图像、动画、音频、视频等。
5多媒体技术是指利用计算机技术同时对两种或两种以上的媒体进行采集、操作、编辑、存储等综合处理的技术,它具有交互性、集成性、多样性、实时性等特征。
6.多媒体技术主要应用在娱乐、教育、医疗、平面设计、动画设计、影视制作、人工智能模拟等领域7.ACD See是较为流行的数字图像处理软件。
8.ACD See主界面除了主菜单外,还包括管理、查看、编辑、online 选项卡。
9.图像素材除了从网上获取外,还可以从光盘、扫描仪、数码相机中获取。
10.Snagit软件是用于屏幕、文本和视频捕获、编辑与转换的文件。
11.使用Snagit软件捕获屏幕窗口的时候,若选择“基础捕获方案”中的“全屏幕”选项,按下快捷键或单击“捕获”按钮,可获取当前全屏幕的图形。
12.常见的图像文件格式有BMP 、JPG 、GIF 、PDF、PNG 。
13. Windows“截图工具”提供了任意格式截图、矩形截图、窗口截图、全屏幕截图四种截图方式14.用Windows Live调整照片曝光时,可单击修复面板上的调整曝光按钮,展开调节界面,对照片的亮度、对比度、阴影等进行调节。
单击修复面板上的调整颜色按钮,对照片的色温、色调以及饱和度进行调节15.对比度是指投影图像白色和黑色之间的比值,比值越高,画面层次感越鲜明。
16.饱和度是指颜色的纯度。
纯度越高,图像表现越鲜明;纯度越低,图像表现越暗淡。
17. Windows7自带的“录音机”软件录制的声音文件格式有.wma 。
18.常见的视频文件格式是AVI 、MPEG、MOV、ASF、WMV、RM 、DAT 。