路面不平度构造以及功率谱密度生成检测
- 格式:docx
- 大小:124.70 KB
- 文档页数:6
路谱为本词条添加义项名道路谱,指道路路面谱,简称路谱,指的是路面不平度的功率谱密度曲线。
作为汽车振动输入的路面不平度,主要采用位移功率谱密度描述其统计特性,路面不平度的时间历程可以视作平稳随机过程处理。
目录1路谱定义2路谱的采集与测量3路谱采集的意义展开1路谱定义道路谱,指道路路面谱,简称路谱,指的是路面不平度的功率谱密度曲线。
作为汽车振动输入的路面不平度,主要采用位移功率谱密度描述其统计特性,路面不平度的时间历程可以视作平稳随机过程处理。
1.1路面不平度路面不平度,是车辆工程常用的名词,道路工程则常用路面平整度。
路面不平度指的是道路表面对于理想平面的偏离,它具有影响车辆动力性、行驶质量和路面动力载荷三者的数值特征。
路面不平度曲线的纵坐标是路面的纵向位移变化值,横坐标表示道路的长度,是时间域的一种,在应用上称为长度域或空间域。
路面不平度根据波长可分为长波、短波和粗糙纹理三种类型。
其中长波引起车辆的低频振动,短波引起车辆的高频振动,而粗糙纹理则引起轮胎的行驶噪音。
1.2道路谱的数学模型在实际的工程应用中,由于目前没有形成比较完整的道路谱数据库,因此在很多设计开发试验中,使用的道路模型都是虚拟生成的。
由于应用的需要这方面的研究有很多,例如功率谱模型、时间序列模型、小波模型、分形模型等。
2路谱的采集与测量路谱的测量主要分为接触式和非接触式两种。
真实路形测量技术,可以认作独立的一类测量方法。
2.1接触式道路谱测量具体方式有:水平仪和标杆,直梁基准仪器,三米直尺,多轮仪,颠簸累积仪,递推式路面计结2.2接触式道路谱测量具体方式有:车载式颠簸累积仪,惯性基准的加速度测量路谱方法,惯性基准的激光断面仪,纵向分布多个位移传感器的测量方法2.3真实路形测量技术具体方式有:拖车式的真实路形计,可精确修正车身姿态的测量方法。
3路谱采集的意义汽车的许多构件上都产生动态应力,引起疲劳损伤,其最终破坏形式是疲劳断裂。
路谱的采集,尤其是载荷谱的采集,其意义就是为随后的实验室台架试验或者多体动力学仿真分析提供可靠地数据支持,从而使工程师对汽车各构建的疲劳寿命能够做出准确的预测与判断。

探索路面不平度测量技术的应用吴涛段宁山东省交通工程监理咨询公司山东250014摘要:近几年,城市道路、高速公路在不断增加,路程也在不断增长,汽车数量的急剧增加,导致路面的平整度收到了很大的影响,同样路面不平整对汽车本身也有很大的损害,也关系到车辆的运营时间和费用。
本文就是就路面不平度测量技术的发展情况的基础上,简要的分析了路面不平度数据测量的多种方法,指出了关于数据测量现存的问题并给予分析解决。
最后讨论了路面不平度数据在车辆工程领域的应用及路面不平度数据测量技术的发展方向。
关键词:路面不平度;测量技术;现状中图分类号:U416.2文献标识码:A文章编号:当今社会公路路面不平整会给人们的生活带来很大的不便,在人们出行时也会由于路面的坑坑洼洼会导致乘坐的舒适性与车速降低,这将直接影响到车辆的使用年限和保养以及维修的费用,因此路面不平度的研究受到了国内外学者的广泛关注。
一、路面不平度的表达方法在多年的相关分析结果中可以看出,路面不平整表现的形态多种多样,然而这种多样的表现形态并不能通过一种简单的方法就能将其全部表现出来,但这些不同的形态都有各自的理论描述。
但是世界各国对其的理解不同造就了其不同的衡量。
国内车辆工程领域通常以道路垂直纵断面与道路表面的交线作为路面不平度的样本,通过样本的数学特征方差和功率谱密度函数(PSD)来描述道路的路面状况。
功率谱密度函数能够表示路面不平度能量在空间频域的分布,它刻画了路面不平度即路面波的结构。
下面我们就简单的描述一下,在国际化的标准文件中提到“路面不平度表示方法草案”和我国国内某汽车研究所起草的《车辆振动输入——路面平度表示》标准均提到建议公路路面的功率谱密度的拟合表达式为:G。
(n)一G。
(n。
)(n∕n。
)(1)式中:带宽为(n1,n2),n1和n2分别为有效频率的上限和下限;n。
为参考空间频率;Gq(n。
)为参考空间频率n。
下的路面功率谱密度,称为路面不平度系数,其值取决于道路的路面等级;ω为频率指数,为双对数坐标上斜线的频率,它决定路面功率谱密度的频率结构。
第3章路面文件的生成3.1 随机路面不平度的拟合理论[4][5][17][18][39]大量的测量分析结果表明,路面不平度具有随机、平稳和各态历经的特性,可以用平稳随机过程理论来分析描述。
通常把道路垂直纵断面与道路表面的交线作为路面不平度的样本,通过样本的数学特征――方差或功率谱密度函数来描述路面。
均值为零时,方差可以反映路面不平度大小的总体情况;功率谱密度函数能够表示路面不平度能量在空间频域的分布,它说明了路面不平度或者说路面波的结构。
当功率谱密度用坐标图表示时,坐标上功率谱密度曲线下的面积就是路面不平度方差。
从功率谱密度函数不仅能了解路面不平度的结构,还能反映出路面的总体特征。
因此,功率谱密度函数(PSD)是路面不平度的最重要数学特征。
文献[17、39]介绍了采用多种方法生成路面不平度的时域模型,如:滤波白噪声生成法(线性滤波法),基于有理函数PSD模型的离散时间随机序列生成法,根据随机信号的分解性质所推演的谐波叠加法(也称频谱表示法),以及基于幂函数功率谱的快速Fourier反变换生成法等。
白噪声激励模拟的基本思想是:将路面高程的随机波动抽象为满足一定条件的白噪声, 然后经一假定系统进行适当变换而拟合出路面随机不平度的时域模型。
离散时间随机序列生成法的基本思想是:基于Parkhilovsk ii 提出的另一种有理函数形式的功率谱密度表达式[17],建立路面不平度时间离散化模拟的递推公式[17]。
谐波叠加法的基本思想是:随机正弦波(或其他谐波)叠加法采用以离散谱逼近目标随机过程的模型, 是另一种离散化数值模拟路面的方法。
基于幂函数功率谱的快速Fourier反变换生成法的基本思想是:由功率谱密度的离散采样构造出频谱, 然后对频谱进行Fourier逆变换得到时域模拟的轨道不平顺激励函数。
但是,不管是标准道路谱还是实测道路谱,其PSD 是路面不平度的一个统计量。
因此,对应于测量范围内某一种确定的路面不平度,其PSD 是唯一的;但对于给定的PSD ,其模拟设计的路面不平度并不唯一,也就是说频域模型和时域模型并非一对一的映射,因此从频域模型所得的路面不平度的时域模型只能看成是满足给定路谱的全部可能的路面不平度中的一个样本函数。
b级路谱不平度和功率谱密度
B级路谱的不平度通常通过路面功率谱密度这一指标进行描述,它能够反映路面不平度在空间域内的分布特性。
路面不平度对于车辆的行驶舒适性、安全性以及车辆对路面的适应性具有重要意义。
在车辆工程领域,常常采用模拟路谱不平度的方法来评估车辆在不同路面条件下的行驶性能。
路面功率谱密度的定义是路面不平度在空间域内的能量分布情况。
它可以通过实验手段测量得到,也可通过数学模型进行模拟。
路面不平度的空间频率范围通常在0.01~100毫赫兹之间,其中0.01~10毫赫兹范围内对应的是长波不平度,而10~100毫赫兹范围内对应的是短波不平度。
长波不平度主要影响车辆的行驶平顺性,而短波不平度则主要影响车辆的操纵稳定性。
因此,在车辆工程中,需要综合考虑路面功率谱密度的长波和短波分量,以优化车辆的性能。
在车辆行驶过程中,路面不平度会对车辆产生动态载荷,影响车辆的行驶平顺性、操纵稳定性以及轮胎的磨损。
通过研究路面功率谱密度,可以更好地了解路面不平度的特性,从而优化车辆的悬挂系统、转向系统等部件的设计,提高车辆对不同路面条件的适应性。
总之,路面功率谱密度是描述路面不平度的重要指标,对车辆工程具有重要意义。
了解并掌握路面功率谱密度的特性,有助于优化车辆设计,提高车辆性能,保障车辆行驶的安全性和舒适性。
一、概述路面不平度是指路面的高低起伏和弯曲程度,对车辆行驶和交通安全有着重要影响。
路面不平度的评价和分析对于道路建设和维护具有重要意义。
在工程领域中,常常使用功率谱密度来描述路面不平度的频率和振幅特性。
本文将介绍如何使用Matlab程序对路面不平度的功率谱密度进行分析。
二、路面不平度的功率谱密度1. 路面不平度的定义路面不平度是指路面在垂直方向上的高度变化,通常用地面标高或者与某个基准面的偏移量来描述。
路面不平度可以由实测数据或者模拟方法得到。
其中,实测数据可以通过车载激光雷达或者路面激光测量仪等设备采集得到。
2. 功率谱密度的概念功率谱密度是描述信号随时间的频率和幅度特性的一种数学工具,可以用来描述路面不平度的频率成分和振幅特性。
在频域上,路面不平度的功率谱密度可以表示为S(f),其中f表示路面不平度的频率成分。
根据经验,功率谱密度通常是在对数坐标系上分析,以便更好地展现低频和高频成分。
3. 路面不平度的功率谱密度分析路面不平度的功率谱密度分析可以通过对路面不平度数据进行傅里叶变换得到路面不平度的频域表示。
然后可以通过对频域表示进行功率谱密度的计算和分析,得到路面不平度的频率成分和幅度特性。
功率谱密度的计算和分析可以通过Matlab程序来实现。
三、Matlab程序实现1. 数据导入需要将实测的路面不平度数据导入到Matlab程序中。
可以使用Matlab中的load函数或者直接复制粘贴方法将数据导入到Matlab 工作空间中。
2. 傅里叶变换接下来,将导入的路面不平度数据进行快速傅里叶变换(FFT),得到路面不平度数据的频域表示。
可以使用Matlab中的fft函数来实现。
3. 功率谱密度计算得到路面不平度数据的频域表示后,可以通过FFT结果来计算路面不平度的功率谱密度。
功率谱密度的计算可以通过对频域表示的幅度进行平方得到。
4. 绘制功率谱密度图将计算得到的路面不平度功率谱密度绘制成图像。
可以使用Matlab 中的plot函数来实现功率谱密度图的绘制。
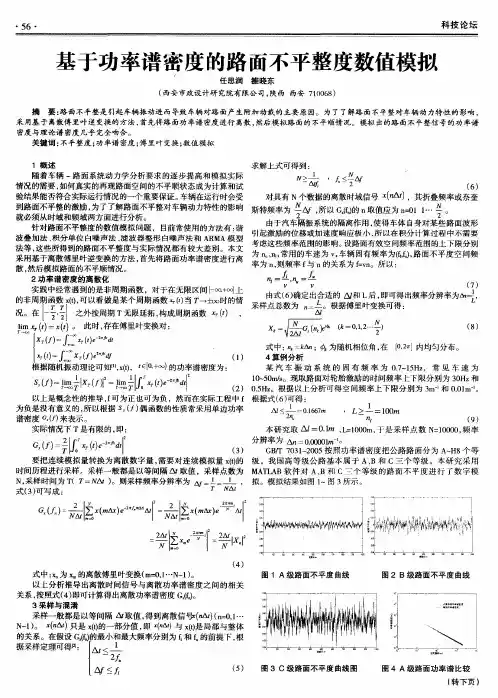
典型道路谱的生成方法研究马颖;段虎明;石锋【摘要】代表地区路面不平度总体状况的道路谱数据,在汽车设计研发中起着重要作用,但目前缺少获取典型道路谱的方法.为了解决这一问题,提出一种典型道路谱生成方法,该方法包含典型路段选取和测量、道路谱计算和滤波、典型道路谱提取三个主要步骤.以北京地区真实路面测量数据为例,进行典型道路谱生成,得到了能够表征某类路面的典型谱.该方法工程意义明确,效果明显,在汽车工程和道路工程领域有较大应用价值.%Road spectrum data,representing the regional road overall roughness,plays an important role in automotive design and development.Aiming at getting a rational method for generating typical road spectrum a sequential method was proposed,which consists of three main steps,including typical sections selection and measurement,typical road spectrum calculation and filtering and typical road spectrum extraction.Taken as an example,the road surface data in Beijing area were applied to generate the typical road spectrum.The results show that the typical road spectrum generated can represent the characteristics of actual road conditions.The method is of clear engineering significance and obvious effect,and can be widely used in the field of automotive engineering and road engineering.【期刊名称】《振动与冲击》【年(卷),期】2013(032)016【总页数】5页(P19-22,36)【关键词】道路谱;路面测量数据;信号处理;功率谱分析【作者】马颖;段虎明;石锋【作者单位】中国汽车工程研究院,重庆400039;中国汽车工程研究院,重庆400039;中国汽车工程研究院,重庆400039【正文语种】中文【中图分类】U467.1;TN911.7道路路面不平度数据是车辆工程试验中研究外部输入激励的主要成分,影响车辆行驶的平顺性、乘坐舒适性、操纵稳定性、零部件疲劳寿命、运输效率、油耗等各个方面[1-2],在汽车工程领域中,常常使用道路谱,即路面不平度曲线的功率谱密度来反映路面的质量好坏。
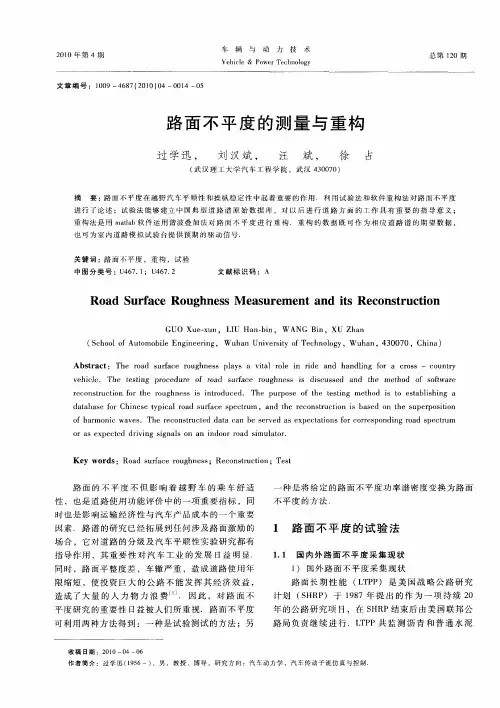
公路工程学课程文献综述学生:朱明辉专业方向:工程项目管理年级:2011级学号:11101060140任课教师:王首绪2011 年 12月公路路面不平度测量技术分析综述(朱明辉)(2011级管科学号:11101060140)摘要: 公路路面不平度在汽车平顺性研究中有着重要的作用,也关系到车辆的运营时间和费用。
该文综述了公路路面不平度测量技术在国内外的发展情况,在此基础上,分析了公路路面不平度数据测量的多种方法,指出了关于数据测量现存的问题并给予分析解决。
最后讨论了公路路面不平度数据在车辆工程领域的应用及公路路面不平度数据测量技术的发展方向。
关键词: 公路路面不平度测量技术激光测量仪研究综述车轮与地面接触的公路路面不平度(车辆学科称不平度,道路学科称平整度)不仅是衡量公路路面质量的指标,而且是影响运输经济性与汽车产品成本的一个重要因素。
公路路面不平度的增大会导致乘坐的舒适性与车速降低,还直接影响到车辆运营时间及费用,因此公路路面不平度的研究受到了国内外学者的广泛关注。
另外,路谱研究已拓展到任何涉及公路路面激励的场合,它对道路的分级及汽车平顺性试验研究都有较大的指导作用,其重要性和必要性对汽车工业的发展日益明显。
同时,公路路面平整度差,车辙严重,造成道路使用年限缩短,使投资巨大的公路不能发挥其经济效益,造成了大量的人力物力浪费。
所以,无论从车辆学科还是道路学科显得日益迫切。
但是,公路路面不平度的研究相对于空气动力学和流体力学的研究有着一定的困难,因为公路路面不像空气和水对飞机和船舶那样均匀和连续,而是一个随机的过程,所以它不但是一个数学问题,更是一个工程化应用问题。
同时,一些关键的技术和方法也制约了公路路面不平度的研究,如快速傅立叶变换(FFT)直到1965年才由Cooley Tukey完成,有关谱窗、泄漏、误差等问题,国内在20世纪70年代还在探讨中。
1 公路路面不平度的表达方法大量的测量分析结果表明,公路路面不平度具有随机、平稳和各态历经的特性,可用平稳随机过程理论来分析描述。
路面不平度的数值模拟研究[摘要] 在汽车设计开发过程中,常需要预测、研究汽车零部件在时域内振动响应,于是在系统参数已知的情况下,需要即需有公路路面的随机不平度数据。
本文研究了一种公路路面不平度的数值模拟新方法,即直接对已知路面不平度的功率谱密度经过一系列处理获得路面的不平度值,研究表明所得路面不平度数据的功率谱密度与所要求的准确一致,并且这种方法简洁实用、便于操作。
关键词:功率谱密度;路面不平度;傅立叶变换;采样1、引言汽车以一定的速度行驶时,路面的随机不平度通过轮胎、悬架等传递到车身上,并通过座椅将振动传递到人体。
当把汽车近似为线性系统处理时,得到了路面不平度功率谱以及车辆系统的频响函数,就可以求出各响应物理量的功率谱,从而可分析车辆振动系统参数对各响应物理量的影响和评价平顺性。
然而,汽车振动系统中包括许多非线性元件,如轮胎(有可能离地)、渐变刚度悬架、液力减振器、橡胶减振块及悬架的干摩擦阻尼等。
为获得更准确的结果,特别是在进行振动幅度较大的汽车可靠性等研究时,需采用非线性振动模型[1]。
对于非线性系统,线性系统中熟知的叠加原理不再成立,不能直接采用频域方法进行研究,只能在时域中进行研究。
另外,最近主动、半主动控制悬架的研究已经了人们充分重视,控制系统的反馈信号是时域信号,所以在进行控制策略研究时,也只能在时域中进行。
对于这两类问题,所需的路面激励是时域或空间域信号,而非频域信号。
获得路面随机不平度的方法有两种,一种是试验测试,一种是将路面不平度的功率谱密度变换为空间域激励函数,近年来受到了广泛重视[1-4]。
1984年国际标准化组织在文件ISO/TC108/SC2N67中提出了路面不平度的功率谱密度表达式模型和分等方法。
1986年,中国学者在进行了大量研究的基础上,也提出了类似的表达式和分等方法,制订了相应的国家标准,即GB7031-86《车辆振动输入—路面平度表示方法》。
对于路面不平度空间域(或时域)内的问题,各国学者进行了大量研究,早期的研究方法有谐波叠加法(或称三角级数合成法),该方法的基本思想是将路面不平度表示成大量具有随机相位的正弦或余弦之和。
路面不平度构造以及功率谱密度生成检测
一
构造C级路面不平度构造,采用谐波叠加法(又称为三角级数法),常见空间频率范围为:0.011<n<2.83,车速为30km/h, 采用Parseval 公式和相关定理,谐波叠加,生成C级路面不平度时域信号。
程序如下:
n1=0.011;
nh=2.83;
n0=0.1;
G0=256*10^(-6);
N=2000;v=30/3.6;L=1000; %区间数车速距离
fl=n1*v;fh=nh*v; %时间频域
fk=fl+(fh-fl)/(2*N):(fh-fl)/N:fh-(fh-fl)/(2*N); %中心频率
faik=2*pi*rand(1,N); %相位角
ak=zeros(1,N); %系数
for i=1:N
ak(i)=sqrt(2*G0*n0^2*v*(fh-fl)/N/(fl+(i-1)*(fh-fl)/N)/(fl+i*(fh-fl)/N ));
end
t=0:1/fh/2:L/v; %时间采样频率为最高时间频率的两倍
Lt=length(t);
qk=zeros(N,Lt);
for i=1:N
qk(i,:)=ak(i)*sin(2*pi*fk(i)*t+faik(i));
end
qt=zeros(Lt,1);
qt(:,1)=sum(qk)';
plot(t,qt(:,1)),grid on
title('c级路面时域不平度q(t)')
xlabel('时间t/s')
ylabel('位移q/m')
GC=sqrt(sum(qt.^2)/length(qt)) %路面不平度均方值
L=0:0.05/2.83:1000;
Ll=length(L);
qll=zeros(N,Ll);
nk=0.011+(2.83-0.011)/(2*N):(2.83-0.011)/N:2.83-(2.83-0.011)/(2*N);
for i=1:N
qll(i,:)=ak(i)*sin(2*pi*nk(i)*L+faik(i)); end
ql=zeros(Ll,1);
ql(:,1)=sum(qll)';
figure(2);
plot(L,ql(:,1)),grid on
GC =
0.0143
路面功率谱密度:
figure(3)
ns=10*nh;% 空间采样频率
[pxx,m]=psd(qt,512,ns);% 512为快速傅里叶变换点数
loglog(m,pxx)
grid on ;
hold on ;
n=0.011:0.001:2.83;
y1=128e-6./n.^2 ;
y2=512e-6./n.^2 ;
loglog(n,y1) ;
grid on ;
loglog(n,y2) ;
grid on;
xlabel('空间频率/(1/m)')
ylabel('路面公路车谱密度G(n)/[m^2/(1/m)]')
二
构造F级路面不平度,常见空间频率范围为:0.011<n<2.83,车
速为100km/h。
程序如下:
n1=0.011;
nh=2.83;
n0=0.1;
G0=16384*10^(-6);
N=4000;v=100/3.6;L=1000; %区间数改为4000 车速100 距离
fl=n1*v;fh=nh*v; %时间频域
fk=fl+(fh-fl)/(2*N):(fh-fl)/N:fh-(fh-fl)/(2*N); %中心频率
faik=2*pi*rand(1,N); %相位角
ak=zeros(1,N); %系数
for i=1:N
ak(i)=sqrt(2*G0*n0^2*v*(fh-fl)/N/(fl+(i-1)*(fh-fl)/N)/(fl+i*(fh-fl)/N ));
end
t=0:1/fh/2:L/v; %时间采样频率为最高时间频率的两倍
Lt=length(t);
qk=zeros(N,Lt);
for i=1:N
qk(i,:)=ak(i)*sin(2*pi*fk(i)*t+faik(i));
end
qt=zeros(Lt,1);
qt(:,1)=sum(qk)';
plot(t,qt(:,1)),grid on
title('f级路面时域不平度q(t)')
xlabel('时间t/s')
ylabel('位移q/m')
GC=sqrt(sum(qt.^2)/length(qt)) %路面不平度均方值
L=0:0.05/2.83:1000;
Ll=length(L);
qll=zeros(N,Ll);
nk=0.011+(2.83-0.011)/(2*N):(2.83-0.011)/N:2.83-(2.83-0.011)/(2*N); for i=1:N
qll(i,:)=ak(i)*sin(2*pi*nk(i)*L+faik(i));
end
ql=zeros(Ll,1);
ql(:,1)=sum(qll)';
figure(2);
plot(L,ql(:,1)),grid on
运算结果:
GC =
0.1210
路面功率谱密度:
figure(3)
ns=10*nh;% 空间采样频率
[pxx,m]=psd(qt,512,ns);% 512为快速傅里叶变换点数loglog(m,pxx)
grid on ;
hold on ;
n=0.011:0.001:2.83;
y1=8192e-6./n.^2 ;
y2=32768e-6./n.^2 ;
loglog(n,y1) ;
grid on ;
loglog(n,y2) ;
grid on;
xlabel('空间频率/(1/m)')
ylabel('路面公路车谱密度G(n)/[m^2/(1/m)]')。