包装机操作知识培训教材
- 格式:ppt
- 大小:7.11 MB
- 文档页数:54
全自动打包机培训内容一、工作原理:通过各种电气原件信号的输入PLC或PC人,使电机传动凸轮转动,在适当的时候,压住带子前端、收带、拉紧带、压紧带子后端的适当处,切断带子,把两层带子热粘合,弹出带子,滑板复位,最后送出带子的整个过程。
二、工作流程:捆扎信号―――制动器放开主,电机启动―――右顶刀上升,顶住带子于滑板―――“T”导带板后退―――退带探头接近开关接通―――主电机停转,制动器吸合―――退带电机启动,退带0.5秒―――主电机二次启动,制动器放开―――大摆杆二次拉紧―――左顶刀上升顶住带子于滑板处―――加热片向两带头中部插入―――中顶刀上升顶住两带头人,使带子表面熔解―――中顶刀下移―――加热片后退―――中顶刀再次上升顶住两带头,给带子加压,使其充分熔接―――中顶刀下降,左右顶刀同时下降―――滑板后退―――打包带向上弹出―――“T”板复位―――送带接近开关接通―――送带电机启动,带动带子送带―――大摆杆复位―――带子到位―――停机接近开关接通―――电机停机刹车吸合三、全自动打包机各机械部分介绍:A.机芯机构组合部分:1、刀顶体机构组合部分2、大杆拉紧机构组合3、送退带机构组合4、凸轮机构组合5、加热片机构组合6、滑板机构组合7、预送带机构组合8、捆紧力调整机构组合B.总装部分:1、送退带电机的安装位置、方法;2、大摆杆机构总成的安装方法、及拉紧原理;3、刹车事盘机构的安装方法、组合结构及原理;4、预送带机构总成与预送带电机的安装位置,注意事项;5、带仓的安装及注意事项;6、主电机的安装及注意事项;7、框架组合的安装和调整方法;四、全自动打包机各机械部分安装注意事项:A.机芯机构组合部分:1、刀顶体机构组合部分;A.腔体与顶体的相互运动表面无毛刺表面要求光滑;B.安装过程中,腔体与顶体之间应留有0.05-0.10MM的间隙;C.顶体放入腔体内,可抚靠自重自由降落;同时中顶体与右隔板的要保持紧密接触,以保证带子能胜利切断;D.顶体腔与簧座在相对运动中无拉伤、擦伤现象,无负载时配合灵活;E.簧座小轴与滚轮之间间隙小于0.1MM,同时转动灵活;F.右隔板顶面到滑板之间的间隙为1.5-1.7MM。
编写:陈力2002年11月30日打包机培训材料一.结构:打包机主要由桌型外壳、不锈钢面板、感应电动机、电器盒、减速机、皮带传动机构、凸轮机构等组成。
(其具体结构详见说明书或实物)二.工作原理:将被捆的物体放在打包机台面上,调整适当的供带长度,将带头沿着导向槽插入直至触动工作开关,前顶刀自动上升,将带头压住,随后带子被张紧,另一端被后顶刀压紧,然后中刀上升,将带子切断,带子被切断后,中刀开始下降,随后温度约300℃左右的热刀,伸入带子两层中间,使包装带表面热熔化,然后热刀迅速退出,中刀又一次上升,继而将捆包带压紧,使接头处焊接牢固,最后中刀、前顶刀、后顶刀下降将带子释放,完成捆包过程。
三.故障分析与排除:1.捆包物太松或太紧:现象:太松时送带无力、未捆紧即切带。
太紧时不切带。
排除:调整打滑片后的张紧螺丝。
(参照说明书图7)2.带子自动抖退或抖进:现象:在无捆包机器转动状态下,带子自动颤抖的往后退带或自动颤抖的往前送带。
排除:调整上分机上的L型曲板上或下的两个螺母,使机器虽在转动,但带子是静止。
调整时应注意,不得将L型曲板死锁,曲板上的两个螺母与曲板下的两个螺母应与L型曲板留有约0.5~1mm间隙。
(参照说明书图9)3.不出带:现象:在打包机完成捆包动作一周期后,打包机不出带。
原因:A.送带分机调整不良。
B.穿带错误,未穿过导带杆。
C.凸轮旁的LS3接触不良或损坏。
(参照说明书图14)D.松紧调整太松,出带无力。
E.出带调节器故障。
F.上下分机之间有杂物或导带片松动。
G.电磁铁不吸合。
H.主控板保险管损坏。
排除:A.参照第(2)点调整上分机L型曲板的间隙。
B.将带子抽出重新安装。
C.调整LS3位置、检查LS3开关有无损坏或更换。
D.调整打滑片后的张紧螺丝。
(参照说明书图7)E.更换出带调节器。
F.将上分机拆下清理杂物或将导带片拧紧。
G.检查电磁铁线路有无损坏或更换。
H.更换保险管或更换主控板。
4.不退带:现象:将被捆包物体放在打包机上,将打包带绕过被捆包物体,带头沿着导带槽插入,此时打包机不能退带张紧。
拉伸膜包装机(R240)本篇共分以下四各方面:一、基本结构二、工作原理三、操作规程1、开机顺序2、关机顺序3、基本参数调整4、操作人员注意事项四、维护保养1、维护保养内容2、常见故障及处理办法3、维护人员注意事项一、基本结构成型部分、链条带动部分、热封部分、日期打印部分、横切刀部分、纵切刀部分、产品输送部分1、成型部分:成型加热顶盖、成型箱体抬升机构共同组成成型控制部分,其中有汽缸的行程控制限位磁开关,和抬升机构的高度控制接近开关来限制箱体抬升的高度2、链条带动部分:主要有两条同步运行的链条,带动底膜以每次一个步进速度向前运行,主要由步进编码器来确定每一步进所走过的行程,从而实现稳定的运行3、热封部分:主要有热封箱体抬升机构、加热板、热封气囊、真空传感部分,同时与成型机构类同依靠磁开关和接开关来控制汽缸行程和箱体开口大小4、日期打印:色带打印现已改为底膜热合喷印日期(CFS为XY轴自动喷印装置)5、横切部分:由底部刀托架,上部刀片和气囊组成6、纵切刀部分:由电机带动连杆、连杆上刀片可实现左右调整,下部由刀托架支撑进行切割7、产品输送部分:主要传动动力来自主链条驱动的万向节机构,可实现与机器步进电机和连续运转功能8、废膜回收:通过一个带负压的真空泵系统将切下的边膜回收二、工作原理拉伸膜就时将一台制袋成型机与一台箱式包装机的热合部分,吧他们有机的串联起来形成一个连续工作的包装机,然后加上日期打印,横切割、纵切割、废膜回收等部分就组成了一个完整的拉伸膜包装机。
工作过程:当底膜行至于成型箱体后,成型箱体抬升,夹住底膜,模具箱体下腔开始吹气,将底膜向上加压,使膜紧贴到成型加热板上开始预热,当达到设定时间后,成型板上部向下加压,同时箱体底部腔体与真空管路接通,开始向下吸膜,完成成型过程;达到预设成型时间后箱体进气,箱体将下落,开始下一步进行成型,于此同时热合腔体与成型腔体同步完成抽真空和热封过程,当真空达到预设值后,热合气囊带动加热板向下加压,完成热封过程,达到热封时间后,箱体进气阀门打开进气,进气完成后热封箱体下落完成热封过程。
车间包装工培训教程目录一.安全生产规范..................................................... 错误!未定义书签。
1.用电安全 ..................................................................................... 错误!未定义书签。
2.机械操作安全.............................................................................. 错误!未定义书签。
3.消防知识 ..................................................................................... 错误!未定义书签。
二.业务技能知识......................... 错误!未定义书签。
1.印字质量检查SOP ..................................................................... 错误!未定义书签。
2.铝塑分装岗位质量检查SOP ..................................................... 错误!未定义书签。
3.塑料瓶分装工序质量检查SOP ................................................. 错误!未定义书签。
4.外包装岗位质量检查SOP ......................................................... 错误!未定义书签。
5.车间内包装材料领料、验收、暂存和发放SOP...................... 错误!未定义书签。
6.印字后包装材料的暂存和发放SOP ......................................... 错误!未定义书签。

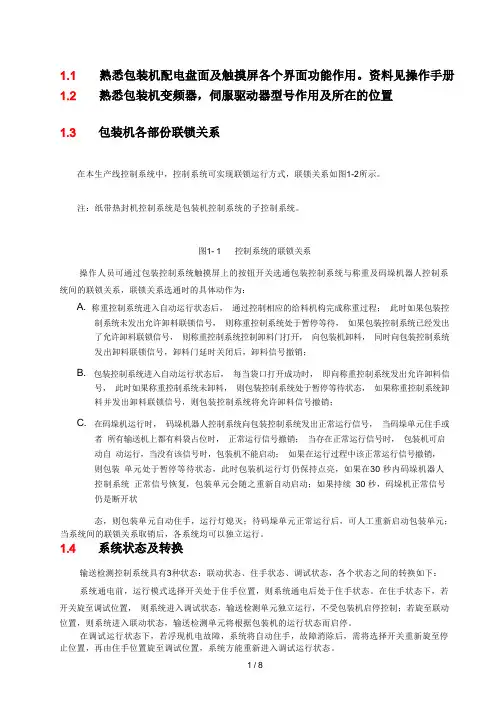
在本生产线控制系统中,控制系统可实现联锁运行方式,联锁关系如图1-2所示。
注:纸带热封机控制系统是包装机控制系统的子控制系统。
图1- 1 控制系统的联锁关系操作人员可通过包装控制系统触摸屏上的按钮开关选通包装控制系统与称重及码垛机器人控制系统间的联锁关系,联锁关系选通时的具体动作为:A. 称重控制系统进入自动运行状态后,通过控制相应的给料机构完成称重过程;此时如果包装控制系统未发出允许卸料联锁信号,则称重控制系统处于暂停等待,如果包装控制系统已经发出了允许卸料联锁信号,则称重控制系统控制卸料门打开,向包装机卸料,同时向包装控制系统发出卸料联锁信号,卸料门延时关闭后,卸料信号撤销;B. 包装控制系统进入自动运行状态后,每当袋口打开成功时,即向称重控制系统发出允许卸料信号,此时如果称重控制系统未卸料,则包装控制系统处于暂停等待状态,如果称重控制系统卸料并发出卸料联锁信号,则包装控制系统将允许卸料信号撤销;C. 在码垛机运行时,码垛机器人控制系统向包装控制系统发出正常运行信号,当码垛单元住手或者所有输送机上都有料袋占位时,正常运行信号撤销;当存在正常运行信号时,包装机可启动自动运行,当没有该信号时,包装机不能启动;如果在运行过程中该正常运行信号撤销,则包装单元处于暂停等待状态,此时包装机运行灯仍保持点亮,如果在30 秒内码垛机器人控制系统正常信号恢复,包装单元会随之重新自动启动;如果持续30 秒,码垛机正常信号仍是断开状态,则包装单元自动住手,运行灯熄灭;待码垛单元正常运行后,可人工重新启动包装单元;当系统间的联锁关系取销后,各系统均可以独立运行。
输送检测控制系统具有3种状态:联动状态、住手状态、调试状态,各个状态之间的转换如下:系统通电前,运行模式选择开关处于住手位置,则系统通电后处于住手状态。
在住手状态下,若开关旋至调试位置,则系统进入调试状态,输送检测单元独立运行,不受包装机启停控制;若旋至联动位置,则系统进入联动状态,输送检测单元将根据包装机的运行状态而启停。
包装工操作技术培训资料1、包装机生产厂家是哪一家?答:我公司购进唐山电子智能有限公司制造。
2、包装机是什么型号?答:是唐山电子有限公司制造的WBH-8型。
3、它的优势是什么?答:具有称量精度高、密封性能好、扬尘小、自动化程度高及操作简便等优点。
4、它的设计生产能力多少吨?答:八嘴回转包装机的能力为120t/h。
5、包装机的操作启动前的工作程序答;5.1 设备启动前的检查和准备工作本系统的全部设备,在每次启动前,都应做认真的检查调整工作。
5.2.1开机前的对外联络(1)根据质控处通知单,确定发放水泥的品种、标号、出厂编号、库号和放库搭配比;1:1:1。
(2)通知站台接包人员做好接包准备或汽车装车人员做好装车准备;(3)与包装变电室联系送电。
5.2.2 启动前的检查(1)在设备启动前,要对设备内部进行全面检查,清除安装或检修时掉在设备内的杂物,检查完毕后,关好人孔门、检查门,并做好密封,以防止生产时发生漏风、漏料、漏油等现象。
(2)润滑设备和润滑油量的检查及调整1)所有设备的传动装置:包括减速机、电机、联轴器等润滑点要加好油;2)所有设备轴承、活动部件等部位要加好油;3)所有电动执行机构要加好油;4)设备内部、人孔门、检查门的检查及密封。
(3)所有阀门的开闭方向及开度的确认1)所有手动闸板阀在开车前,要全部开到适当的位置,以保证物料的畅通;2)所有的手动阀门应确认其阀板位置与其指示一致,并在设备启动前,都打到适当的位置;3)所有的电动阀门,首先在现场确认能否灵活打开,阀轴与连杆是否松动,然后由控制室进行遥控操作,确认控制室与现场的开闭方向是否一致,开度与指示是否准确。
如果阀门带有限位开关,还要与中控室核对限位信号是否有返回。
(4)设备的紧固检查检查设备的紧固情况。
如所有设备基础地脚螺栓、提升机链斗固定螺栓等不能出现松动。
设备的传动易松部位,都要进行严格的检查。
(5)压缩空气的检查检查管道、阀门有无漏气,检查压缩空气的阀门是否打开,压力是否满足生产要求。
GDX2培训教材第一篇:GDX2培训教材卷包车间培训资料GDX2机械基础知识简述一、概述GDX2型包装机是把烟支、铝箔纸、内框纸和商标纸等物料,按照设备设定的工艺流程进行有序运动,最终完成小盒烟包成型的设备;在该机组中,它的上游机是X2横包机,它的下游机是4350透明包装机。
GDX2型包装机的工艺流程大致可分为:烟组的成型——铝箔纸的成型——内框纸的成型——商标纸的成型——烟包的输出等五个部分。
下面我们将从工艺流程、主要组成部件、操作要点及质量注意事项四个方面分别介绍这五个部分。
二、烟组成型部分1、烟组成型部分工艺流程:烟支从联接过道输送过来,经菱形分烟器清理后,经过烟支搅拌器按7-6-7的排列落入下烟道,烟组被烟库侧压板压紧后由推烟排推入烟库皮带盒模,烟组在随动护板的保护下形成7-6-7的烟组,烟组在皮带盒模中作步进运动先后经过烟支堵检测器、空头-缺支检测器、剔除推杆、空模检测器,在一轮过桥及一轮压实推杆的保护下由一轮入口推杆将烟组推入一轮,一轮逆时钟旋转180度后,烟组在一轮随动护叉的保护下,由一轮出口推杆经一、二轮过桥推入二轮,这就是烟支形成烟组的全过程。
2、烟组成型部分的主要组成部件λ烟支搅拌器:烟支搅拌器由一个单独的电机控制,与主机没有直接的传动联系。
此机构有一个机械死点位置,平时在设备停机启动时有搅拌器不动作的现象,一般说来都是此机构处于死点位置,只要用M8的扳手旋转烟支搅拌杆转过死点位置即可。
λ推烟排:推烟排是烟组成型的关键部件,共计有三个,分三个不同的台阶面。
右边的推烟位置最低,左边的推烟排位置最高。
推烟排与主机联接有一个离合器,手动盘车将准心慢慢对齐(此时排烟排处于正行程的最末端),微用劲扳动手柄即可合上离合器。
λ侧压板:侧压板的作用是使烟支顺利进入盒模而形成烟组。
分左右两组,共计六个。
λ烟支随动护板:烟支随动护板是保护盒模中未成型的烟组不散开。
当盒模作间歇性步进运动时,烟支随动护板同时作间歇性步进运动。