Smith预估器在大迟延系统中的应用
- 格式:pdf
- 大小:240.56 KB
- 文档页数:3

西安邮电学院毕业设计(论文)题目:大时滞系统的模糊-smith控制院(系):自动化学院专业:自动化班级:自动化0804班学生姓名:耿宗杰导师姓名:魏秋月职称:讲师起止时间: 2012年 03月 06日至 2012年 06月 11日西安邮电学院毕业设计(论文)任务书学生姓名耿宗杰指导教师魏秋月职称讲师院(系)别自动化学院专业测控技术与仪器题目大时滞系统的模糊-Smith 控制任务与要求分析采用常规模糊控制的大时滞系统控制性能不佳的原因,研究适合大时滞系统的模糊-Smith 控制策略,并对控制算法进行仿真。
算法应用于大时滞系统控制时应具有较好的性能,且对于时滞参数大范围变化的系统应具有良好的鲁棒性。
开始日期2010年12月10日完成日期2012年6月25日院长(签字) 201112 月 6 日西安邮电学院毕业设计 (论文) 工作计划学生姓名耿宗杰指导教师___魏秋月_ 职称_ 讲师_____院(系)别____自动化学院_____专业__自动化 __ 题目__________________________________________________大时滞系统的模糊-Smith 控制工作进程起止时工作内容3月19日~3月26日收集资料,撰写、提交开题报告3月27日~4月11日方案论证与确定4月12日—4月26日学习、熟悉模糊逻辑工具箱和SIMULINK仿真工具的使用4月27日—5月11日设计模糊-Smith控制器5月12日—5月19日系统仿真和结果分析5月20日—6月4日撰写论文6月3日—6月10日修改、装订论文,准备答辩6月11日—6月18日准备答辩主要参考书目(资料)1. 楼顺天, 胡昌华, 张伟.基于 MATLAB 的系统分析与设计—模糊系统.西安: 电子科技大学出版社, 1998.2. 席爱民.模糊控制技术. 西安: 电子科技大学出版社, 2008.3. 郑恩让,聂诗良. 控制系统仿真. 北京: 中国林业出版社, 2006.计算机、MATLAB 软件每周三为固定答疑时间,其余时间有问题时电话联系地点:教研室或测控实验室无主要参考书目(资料) 主要仪器设备及材料论文(设计)过程中教师的指导安排对计划的说明西安邮电学院毕业设计(论文)开题报告自动化学院自动化专业 08 级 04 班课题名称:大时滞系统的模糊_Smith控制学生姓名:耿宗杰学号:06071108指导教师:魏秋月报告日期: 2012-3-221.本课题所涉及的问题及应用现状综述涉及的问题:本题目针对普通模糊控制的大时滞系统控制性能不佳的原因,研究了一种适合大时滞系统的模糊_Smith控制策略。
时变大时滞系统的控制方法综述1 引言在化工、炼油、冶金、玻璃等一些复杂的工业过程当中,广泛地存在着大时滞现象。
由于时滞的存在,使得被控量不能及时地反映系统所承受的扰动,从而产生明显的超调,使得控制系统的稳定性变差,调节时间延长,对系统的设计和控制增加了很大的困难。
而时变时滞的特性则使得问题更加复杂,因而对此类问题的研究具有重要的理论和实际意义。
自从1957年Smith首次提出针对时滞系统的预估控制方法以来,许多学者在这一领域进行了广泛而深入的研究,相继提出了许多行之有效的控制方法。
根据对专统数学模型的依赖程度的不同,这些方法大致可以分为自适应控制和智能控制两大类。
本文即对此进行了总结介绍,分析了各种控制方法的优点及其所存在的局限性,并且探讨了该领域今后的发展方向。
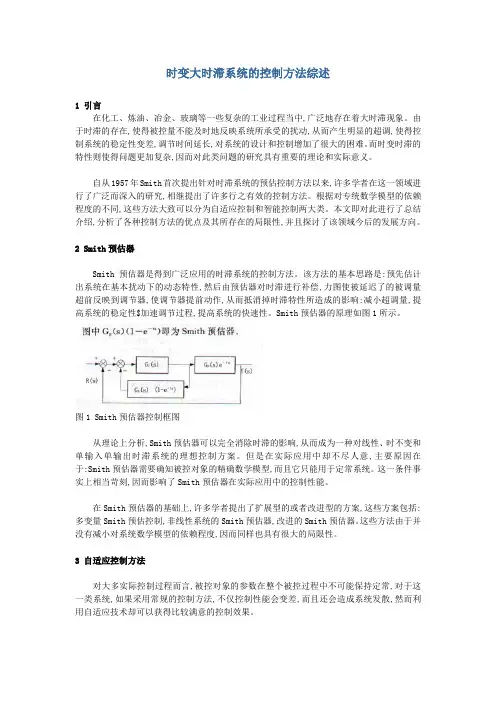
2 Smith预估器Smith预估器是得到广泛应用的时滞系统的控制方法。
该方法的基本思路是:预先估计出系统在基本扰动下的动态特性,然后由预估器对时滞进行补偿,力图使被延迟了的被调量超前反映到调节器,使调节器提前动作,从而抵消掉时滞特性所造成的影响:减小超调量,提高系统的稳定性$加速调节过程,提高系统的快速性。
Smith预估器的原理如图1所示。
图1 Smith预估器控制框图从理论上分析,Smith预估器可以完全消除时滞的影响,从而成为一种对线性、时不变和单输入单输出时滞系统的理想控制方案。
但是在实际应用中却不尽人意,主要原因在于:Smith预估器需要确知被控对象的精确数学模型,而且它只能用于定常系统。
这一条件事实上相当苛刻,因而影响了Smith预估器在实际应用中的控制性能。
在Smith预估器的基础上,许多学者提出了扩展型的或者改进型的方案,这些方案包括:多变量Smith预估控制,非线性系统的Smith预估器,改进的Smith预估器。
这些方法由于并没有减小对系统数学模型的依赖程度,因而同样也具有很大的局限性。
3 自适应控制方法对大多实际控制过程而言,被控对象的参数在整个被控过程中不可能保持定常,对于这一类系统,如果采用常规的控制方法,不仅控制性能会变差,而且还会造成系统发散,然而利用自适应技术却可以获得比较满意的控制效果。
Smith预估补偿器在过热蒸汽温度控制系统中的应用摘要:本文介绍Smith预估补偿器在纯滞后控制系统中的补偿原理及作用,并在过热蒸汽温度控制系统系统中使用Smith预估补偿器获得了成功应用。
Smith预估补偿控制与常规的PID控制相比,具有调节时间短、超调量小、鲁棒性好等优点。
适应于一般工业生产过程中有纯滞后环节的控制系统,有较大的推广应用价值。
关键字:Smith预估补偿器,PID,超调量,鲁棒性,过热蒸汽温度控制系统1.引言在工业生产过程控制中,许多对象具有纯滞后的性质。
这类控制系统的纯滞后时间会使系统的稳定性降低,采用常规的PID的控制运算会引起大的超调和长时间的振荡,控制效果不佳。
有关纯滞后的控制系统,虽然国内外作过不少研究工作,但在工程上有效方法并不多。
本文介绍的就是其中用得较多且技术十分成熟的Smith预估补偿器法及其在过热蒸汽温度控制系统上的应用。
过热蒸汽温度控制系统是单元机组不可缺少的重要组成部分,其性能和可靠性已成为保证单元机组安全性和经济性的重要因素。
过热蒸汽温度较高时,机组热效率则相对较高,但过高时,汽机的金属材料又无法承受,气温过低则影响机组效率。
过热蒸汽温度的稳定对机组的安全经济运行非常重要,所以对其控制有较高的要求。
但是由于过热蒸汽温度是一个典型的大迟延、大惯性、非线性和时变性的复杂系统,本次设计采用串级控制以提高系统的控制性能,在系统中采用了主控-串级控制的切换装置,使系统可以适用于不同的工作环境。
通过使用该系统,可以使得锅炉过热器出口蒸汽温度在允许的范围内变化,并保护过热器营壁温度不超过允许的工作温度。
2. Smith 预估器的补偿原理2.1单回路控制系统于有纯迟延过程的控制系统,调节器采用PID 控制规律时,系统的静态和动态品质均下降,纯迟延愈大,其性能指标下降的愈大。
Smith 针对具有纯迟延的过程,提出在PID 反馈控制的基础上引入一个预补偿环节,使控制品质大大提高。

大滞后系统S m i t h预估器的控制仿真-CAL-FENGHAI-(2020YEAR-YICAI)_JINGBIAN大滞后系统Smith预估器的控制仿真一、实验目的学习借助MATLAB软件设计一个Smith预估器控制一个大滞后环节,并且了解Smith预估器参数对系统的影响。
二、实验原理借助MATLAB软件我们可以轻易的模拟大滞后系统,对其进行控制仿真, Smith预估器的基本原理就是预先估计出过程在基本扰动下的动态特性,然后由预估器进行补偿,力图使被延迟了τ的被调量超前反映的调节器,使调节器提前动作,从而明显的减小超调量和加速调节过程。
控制框图如下:U(s)Y(s)+ --+Y’(s) +其中三、实验内容:对以下大滞后环节采取Smith预估器控制方案进行控制,其中K=2.2T=200τ=60。
采用工程整定中的动态特性参数法,有一组公式如下:由此得到一组参数为:Kc=2.36 Ti=134.7s Td=20.9sGc(s)KsGs(s)用MATLAB中的Simulink仿真工具箱仿真。
TransportDelay1TransportDelay2.2200s+1Transfer Fcn22.2200s+1Transfer Fcn12.2200s+1Transfer FcnStepScope1sIntegrator20Gain2-K-Gain12.4Gaindu/dtDerivative1.其中K Tτ变化5%,其中K=2.31T=210τ=63时。
TransportDelay1TransportDelay2.31210s+1Transfer Fcn22.31210s+1Transfer Fcn12.31210s+1Transfer FcnStepScope1sIntegrator20Gain2-K-Gain12.4Gaindu/dtDerivative其中K T τ变化-5%,其中K=2.09 T=190 τ=57时。
摘要大迟延对象的控制一直是控制领域研究的焦点问题。
加热炉温度控制便属于这类复杂的控制对象。
传统的加热炉温度控制系统采用的是原料油出口温度同燃料油流量或同炉膛温度的串级控制,但由于燃料油流量存在波动,使得温度控制效果较差。
而且由于近年来炉膛改造,炉膛容积增大,使得控制系统主副被控对象均存在较大的时间滞后。
对于无滞后或滞后比较小的系统,通常采用PID控制。
对于大滞后系统,PID 控制效果并不好,需要另加补偿,因此提出了Smith预估补偿控制系统。
而 Smith 预估算法则在模型匹配时具有好的性能指标 ,但是由于这种算法严重依赖模型的精确匹配 ,而在实际中这是很难做到的 ,当模型失配时,Smith 预估算法就难以取得良好的控制效果,因此提出了改进型Smith控制系统。
本文研究的重点是设计与实现适用于燃烧控制过程的控制规律和控制算法。
具体讨论了纯滞后系统的Smith预估器及工程实现方法,着重对这种控制算法进行了较深入的讨论,并提出了一种改进型Smith预估控制器,该控制器把自适应控制与史密斯预估器有机地结合起来,实现对控制系统的参数自整定,而且还通过仿真对设计和改进的结果进行了分析。
仿真实验中,若采用PID控制算法,系统会出现较大的超调量,采用史密斯预估补偿控制没有超调量。
若保持控制器和模型的参数不变,改变对象参数,使估计模型与之失配,此时史密斯预估算法出现振荡,系统稳定性被破坏。
改进型Smith算法不仅能够保持系统的稳定,而且振荡次数少,收敛速度快。
关键词:加热炉;增益自适应;史密斯预估器第一章 绪论1.1 研究的背景及意义加热炉温度控制系统为一个大滞后的系统,改变传统的控制方式,采用温度、流量串级控制,并把煤气热值和烟气残氧检测量引入控制系统,对煤气和空气的配比值进行优化、调节,实现了加热炉高效燃烧控制、温度迅速反应控制。
在纯滞后过程中,由于过程控制通道中存在的纯滞后,使得被控量不能及时反映所承受的扰动。