Smith预估器控制设计要点
- 格式:doc
- 大小:1.24 MB
- 文档页数:17
施密斯预估控制姓名:学号:班级:1 实验目的对大多数控制系统,采用常规的控制技术均可以达到满意的控制效果,但对于复杂及特殊要求的控制系统,采用常规的控制室技术很难达到目的,在这种情况下,就需要采用复杂控制技术,其中Smith 预估控制算法是常用的一种,通过本实验加深对Smith 预估控制算法的理解和掌握。
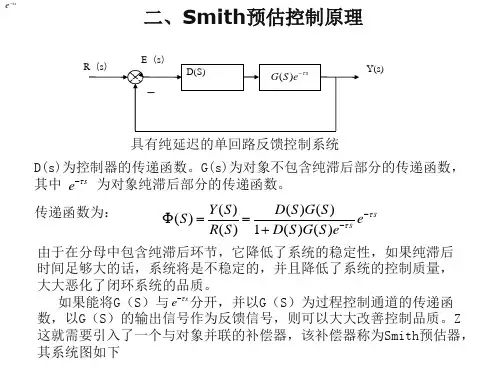
2 实验原理图1为被控对象具有纯滞后特性的单回路反馈控制系统,D (s )是控制器,被控对象的传递函数为etss -)(G p ,其中,)(G p s 为被控对象中不包含纯滞后部分的传递函数,ts-e为被控对象纯滞后部分的传递函数。
)(t r )(t e )(t u )(t y_施密斯预估原理:与D (s )并接一补偿环节,用来补偿被控对象中的纯滞后部分,这个补偿环节称为预估器,其传递函数为)1)((G p tse s --,t 为纯滞后时间,补偿后的系统结构如图2所示。
)(t r )(t e )(t u )(t y_ _)(t y τ由施密斯预估控制器)1)((G p tses --和控制器D (s )组成的回路陈伟纯滞后补偿器,)(s Ds e s τ-)(G p)(s Ds e s τ-)(G p)1)((G p ts e s --其传递函数为:)1)(()(1)()(D m s p e s G s D s D s τ--+=经过补偿后的系统闭环传递函数为:s p p sp m sp m e s G s D s G s D es G s D e s G s D τττ---+=+=Φ)()(1)()()()(1)()(s )(该式说明,进过补偿后,消除了之后部分对控制系统的影响,因为式中ts-e 在闭环控制回路之外,不影响系统的稳定性。
设广义被控对象为:1011()()()1Ts s se e H s G s G s es T sττ----==⋅+取T=1、τ=2、T 1=2.88,经采样(T=1s )保持后,其广义对象z 传递函数为00.2934()0.7066G z z =-,而2se -转换为2个单位迟延。
实验三S m i t h预估 The following text is amended on 12 November 2020.实验报告||实验名称Smith预估控制算法设计实验课程名称计算机控制技术与系统||实验三 Smith 预估控制算法设计实验1、实验目的在控制算法学习的基础上,根据给定对象特性设计Smith 预估控制器算法,并利用Matlab 软件进行仿真实验,同时与PID 算法控制算法进行比较,加深对该控制算法的掌握和理解。
2、系统结构框图Smith 预估控制系统框图为:3、实验过程及分析设广义被控对象为要求一:取τ=2、T 1=,取采样时间T=1s ,采用零阶保持器,使用Matlab 函数求取出广义对象的z 传递函数;实验过程:使用matlab 求z 传函的函数:clc;clear all;close all;T=1;T1=;tao=2;G0=tf([1],[T1 1],'inputdelay',tao)sysd=c2d(G0,T,'zoh')上述函数将s 传函210(s) 2.881s G e s -=+转化为z 传函20.29340(z)0.7066G z z -=-。
要求二:通过对象阶跃响应曲线,整定PID 参数,采用常规PID 进行给定值扰动和外部扰动响应实验,并绘制控制器输出P 和系统输出y 响应曲线; 实验过程:借助matlab 软件中的simulink 搭建系统仿真模型。
首先将外部扰动置零,利用阶跃响应曲线来整定PID 参数。
利用试凑法整定PID 参数。
PID 控制器的数学描述如下。
首先只给比例作用,调节系统使其稳定;其次加入积分作用消除系统静差;最后加入微分作用。
最后合理调整各个参数,使系统品质达到最优。
经过整定,最终选取P=,I=,D=0,N=100,系统可以相对较好的稳定下来。
输出的曲线如下在30T 的时候在对象之前加入的阶跃干扰,在50T 的时候在对象之后加入幅值为的阶跃扰动,得到的系统的输出曲线如下。
第五节 Smith 预估控制Smith 预估控制方法是在1957年由Smith 提出来的,其特点是预先估计被控系统在基本扰动下的动态特性,然后用预估器进行补偿,力图使被延迟的被控制量超前反映到控制器中,使控制器提前动作,从而显著地减小系统的超调量,同时加速系统的调节过程。
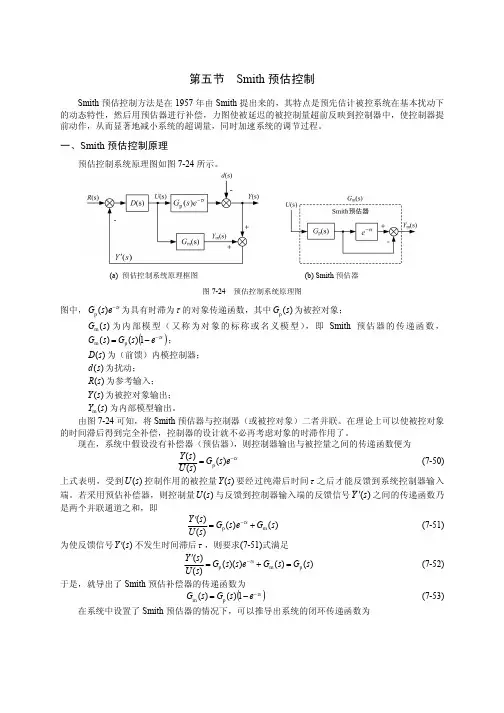
一、Smith 预估控制原理预估控制系统原理图如图7-24所示。
(a) 预估控制系统原理框图 (b) Smith 预估器图7-24 预估控制系统原理图 图中,s e s G τ−)(p 为具有时滞为τ的对象传递函数,其中)(p s G 为被控对象;)(m s G 为内部模型(又称为对象的标称或名义模型),即Smith 预估器的传递函数,()s e s G s G τ−−=1)()(p m ;)(s D 为(前馈)内模控制器;)(s d 为扰动;)(s R 为参考输入;)(s Y 为被控对象输出;)(m s Y 为内部模型输出。
由图7-24可知,将Smith 预估器与控制器(或被控对象)二者并联。
在理论上可以使被控对象的时间滞后得到完全补偿,控制器的设计就不必再考虑对象的时滞作用了。
现在,系统中假设没有补偿器(预估器),则控制器输出与被控量之间的传递函数便为 s e s G s U s Y τ−=)()()(p (7-50) 上式表明,受到)(s U 控制作用的被控量)(s Y 要经过纯滞后时间τ之后才能反馈到系统控制器输入端。
若采用预估补偿器,则控制量)(s U 与反馈到控制器输入端的反馈信号)(s Y ′之间的传递函数乃是两个并联通道之和,即)()()()(m p s G e s G s U s Y s +=′−τ (7-51) 为使反馈信号)(s Y ′不发生时间滞后τ,则要求(7-51)式满足)()())(()()(p m p s G s G e s s G s U s Y s =+=′−τ (7-52) 于是,就导出了Smith 预估补偿器的传递函数为()s e s G s G τ−−=1)()(p m (7-53) 在系统中设置了Smith 预估器的情况下,可以推导出系统的闭环传递函数为)()(1)()()1)(()(1)()(1)1)(()(1)()()()(p p p p p p s G s D e s G s D e s G s D e s G s D e s G s D e s G s D s R s Y s s s s+=−++−+=−−−−−ττττ (7-54) 由上式可以明显看出,在系统的特征方程中,已经不含有s e τ−项。
史密斯(Smith)预估器工业生产过程中的大多数被控对象都具有较大的纯滞后性质。
被控对象的这种纯滞后性质经常引起超调和持续的振荡。
在20世纪50年代,国外就对工业生产过程中纯滞后现象进行了深入的研究,史密斯提出了一种纯滞后补偿模型,由于当时模拟仪表不能实现这种补偿,致使这种方法在工业实际中无法实现。
随着计算机技术的飞速发展,现在人们可以利用计算机方便地实现纯滞后补偿。
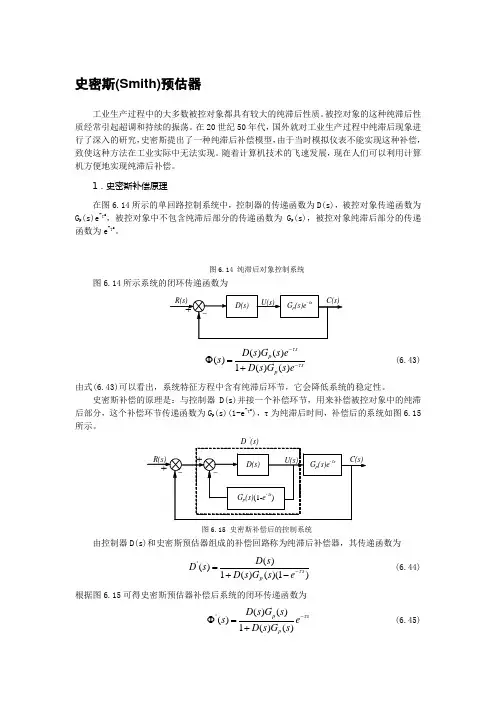
1.史密斯补偿原理在图6.14所示的单回路控制系统中,控制器的传递函数为D(s),被控对象传递函数为G p (s)e -τs ,被控对象中不包含纯滞后部分的传递函数为G p (s),被控对象纯滞后部分的传递函数为e -τs 。
图6.14 纯滞后对象控制系统图6.14所示系统的闭环传递函数为()()()1()()sp s p D s G s e s D s G s e ττ--Φ=+ (6.43)由式(6.43)可以看出,系统特征方程中含有纯滞后环节,它会降低系统的稳定性。
史密斯补偿的原理是:与控制器D(s)并接一个补偿环节,用来补偿被控对象中的纯滞后部分,这个补偿环节传递函数为G p (s)(1-e -τs ),τ为纯滞后时间,补偿后的系统如图6.15所示。
‘图6.15 史密斯补偿后的控制系统由控制器D(s)和史密斯预估器组成的补偿回路称为纯滞后补偿器,其传递函数为'()()1()()(1)s p D s D s D s G s e τ-=+- (6.44) 根据图6.15可得史密斯预估器补偿后系统的闭环传递函数为 '()()()1()()p s p D s G s s e D s G s τ-Φ=+ (6.45)由式(6.45)可以看出,经过补偿后,纯滞后环节在闭环回路外,这样就消除了纯滞后环节对系统稳定性的影响。
拉氏变换的位移定理说明e -τs仅仅将控制作用在时间座标上推移了一个时间τ,而控制系统的过渡过程及其它性能指标都与对象特性为G p (s)时完全相同。
《计算机控制》课程设计报告题目: Smith预估器控制设计姓名:《计算机控制》课程设计任务书指导教师签字:系(教研室)主任签字:2012年7月5 日Smith 预估器控制设计一、实验目的通过混合仿真实验,学习并掌握用于具有纯滞后系统的纯滞后补偿(Smith预估器控制)的设计及其实现。
二、实验内容被控对象为-512()2se G s s =+, 1.0s T =画出系统框图,设计Smith 数字预估器。
三、控制系统仿真 1.方案设计已知纯滞后负反馈控制系统,其中图1.其中D(s)为调节器传递函数,-512()2se G s s =+为对象传递函数,其中-5()sO G s e 包含纯滞后特性,纯滞后时间常数5τ=。
系统的特征方程为:5121()()1()02se D s G s D s s -+=+=+由于闭环特征方程中含有-5s e 项,产生纯滞后现象,/5/150.5m T τ==≥,采用常规的PID 控制会使系统稳定性变差,甚至产生振荡。
为了改善系统特性,引入Smith 预估器,使得闭环系统的特征方程中不含有-5s e 项。
Smith 纯滞后补偿的计算机控制系统:图 2.上图所示ZOH 为零阶保持器,传递函数为:se s G Tsh --1)(=,并且有:lT =τ(l为大于1的整数,T 为采样周期)。
由已知可知, 1.0T s =,则551l Tτ===。
2.负反馈调节器D(z)的确定D(z)为负反馈调节器,通常使用PID 控制规律。
使用扩充响应曲线法对数字PID 控制器进行参数整定。
扩充响应曲线法是在模拟PID 控制器响应曲线法的基础上推广应用到数字PID 控制器参数整定的方法。
扩充响应曲线法是用于具有纯滞后的一阶对象,由前面分析和已知: 1.0T s =,5τ=,5l =,1m T =,因此依据课本128页表4.2扩充响应曲线法整定PID 参数表选择数字PID 参数计算公式,由于1=0.25Tτ=,则选择控制度为1.20,控制规律为PI 控制,因此选定PI 参数为:0.78()pmK T τ=3.60iT τ=所以有:0.156p K = 18i T = 则控制器的传递函数为:i 110.1560.00867()(1)0.156(1)T 18p s D s K s s s+=+=+=⋅ 将得到的模拟控制器用一阶后向差分法离散化得到:1-1-1--1-10.7-717.0)-1(1|)()(1-z z z T T K s D z D i p Tz s =⋅+===】【 3.Smith 补偿器)z D (τ的确定Smith 纯滞后补偿的计算机控制系统的框图:图 3.sT Ks G m O ⋅+=1)( lT ≈τ spes G s G τ-)()(=s m Tsso h e s T s e K e s G s G s G ττ---)1()-1()()()(+==)-1)(()(-s p e s G s D ττ=)-11--11)(-1)(z -K(1 ])1(1[)-1)(z -K(1 )]-1()1()-1([)]([)(1--1--1--1---z ezz s T s Z z e s T s e K Z s D Z z D mT T lm ls m Ts =+=+==τττ令mT -T ea =,)-1(-mT T eK b =则有1--1--1)-1()(az z bz z D l =τSmith 预估器(纯滞后补偿器)的框图:图 4.)-1()()(-1l z z C z C =)()()az -(1)()z -(1c(k)1-11-1-l k u bz k c k c ==最后解得)1-()1-()()-(-)()(1111k ac k bu k c l k c k c k c +==由上一步所得的数据: 1.0T s =,5τ=,5l =,1m T =,12K =解得如下数据:1---110.368mT T a ee e ====1--1(1-)12(1-)7.584mT T b K e e ==⨯=则-1-5-17.584(1-)()1-0.368z z D z zτ=1111()()-(-5)()7.584(-1)0.368(-1)c k c k c k c k u k c k ==+由此可得到:11()7.584(-1)0.368(-1)-(-5)c k u k c k c k =+由此可见,Smith 补偿器的差分方程有1(-5)c k 项,即存在滞后5拍的信号,因此产生纯滞后信号对纯滞后补偿控制是至关重要的。
0 引言时滞现象常产生于化工、轻化、冶金、计算机网络通讯和交通等系统中[1,2]。
就控制系统而言,时滞是指作用于系统上的输入信号或控制信号与在它们的作用下系统所产生的输出信号之间存在的时间上的延迟,当时滞较大时,将会使系统中的被调量不能及时反映控制信号的作用;另外,当被控对象受到干扰而使被调量改变时,控制器产生的控制作用不能及时有效地抑制干扰的影响,从而导致较大的超调量和较长的调节时间,甚至产生不稳定。
因此,大时滞系统一直受到人们关注,成为目前过程控制研究领域的一个重要课题。
过程控制中,通常用过程纯滞后时间常数和系统时间常数之比来衡量过程时滞。
当τ/T≤0.3时,称为一般时滞过程,过程比较容易控制,常规PID控制就能收到良好的控制效果;当τ/T>0.3时,称为大时滞过程,需要采取特殊的高级控制方法,其控制难度随τ/T的比值增加而增加。
本文分析了在过程控制中广泛采用的大时滞过程控制算法——Smith预估补偿法,即Smith预估器,并重点讲述了其改进算法——双自由度Smith预估器,最后进行了仿真。
仿真结果表明该改进算法是可行的。
1 传统Smith预估器传统Smith预估器实质上是一种模型补偿控1.1 Smith预估控制基本思路Smith预估控制是瑞典科学家Smith于1957年提出的一种解决时滞系统控制问题的预估控制方法,其控制基本思路是预先估计出过程在基本扰动下的动态特性,然后由预估器进行补偿控制,使被延迟了的被调量提前反映到调节器,并使之动作,以此来减小超调量与加速调节过程[3]。
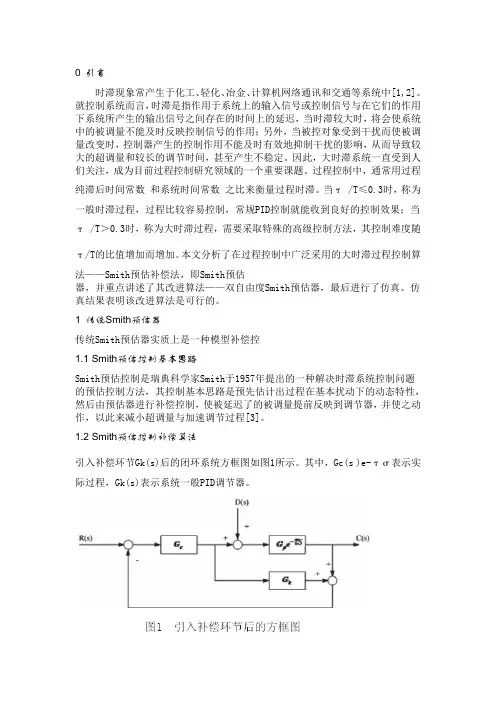
1.2 Smith预估控制补偿算法引入补偿环节Gk(s)后的闭环系统方框图如图1所示。
其中,Gc(s )e-τσ表示实际过程,Gk(s)表示系统一般PID调节器。
由图1可知系统闭环传递函数为引入补偿环节Gk (s)后,希望系统闭环传递函数的分母不再含e-τσ项,即要求1+Gc(s )Gk(s )+Gc(s )Gk(s )e-τσ=1+Gc(s)Gp(s) (2)即Gk(s)=(1-e-τσ)Gp(s) (3)将式(3)代入图1便可得到图2所示的传统连续Smith预估器方框图。
东南大学能源与环境学院实验报告课程名称:计算机控制及系统实验名称:Smith预估控制院(系):能源与环境学院专业:热能与动力工程姓名:学号:0301110实验室:金智楼实验时间:2014 年04月07 日评定成绩:审阅教师:一 实验目的通过实验掌握Smith 预估控制的方法及程序编制及调试。
二 实验内容1. Smith 预估控制系统如图所示,对象G(S)= K ·e-τs/ (1+T 1S),K = 1, T1 = 10 s , τ = 5 s ,Wc(z)采用数字PI 控制规律。
2.对象扰动实验画出U(t) = u0·1(t)时,y(t)曲线。
3.Smith 预估控制(1) 构造W τ(S),求出W τ(Z)。
(2) 整定Wc(s)(按什么整定?) (3) 按图仿真,并打印曲线。
(4) 改变W τ(S)中K ,τ(对象不变),进行仿真比较,观察它们对调节 过程的影响。
三 实验步骤 1.拟订实验方案(1)、对象扰动实验,G(S)离散化,采用后向差分1()()()(1)sY s K e G s U s T s τ-•==+ 令 11z s T --= 则有:y(k)u(k)=K ∙e −τTlnz 1+T1T(1−Z −1)整理得:11()(1)()TKu k N T y k y k T T -+-=+ 其中 N Tτ=#include<iostream.h>#include<math.h> #include<iomanip.h>#include<fstream.h>void main(){ofstream ofile("d:\\21.xls");ofile<<"T"<<'\t'<<"u[k]"<<'\t'<<"y[k]"<<'\n';double u0,T,T1=10,a,b,t=5,k=1;double u[100],y[100];int N,i;cout<<"输入采样周期T:\n";cin>>T;cout<<"输入扰动阶跃值u0:\n";cin>>u0;a=exp(-T/T1);b=k*(1-a);N=int(t/T);cout<<'\n';cout<<"T"<<'\t'<<"u[k]"<<'\t'<<"y[k]"<<'\n';cout<<'\n';cout<<0<<'\t'<<0<<'\t'<<0<<'\t'<<'\n';for(i=0;i<100;i++){if(i==0)u[i]=0;elseu[i]=u0*1;if(i<=(N+1))y[i]=0;elsey[i]=b*u[i-(N+1)]+a*y[i-1];ofile<<i*T<<'\t'<<u[i]<<'\t'<<y[i]<<'\n';cout<<i*T<<'\t'<<u[i]<<'\t'<<y[i]<<'\n';}ofile.close();}(2)、Smith 预估控制按照Smith 的控制,构造1(1)()(1)(1)Ts s t K e W s e s T s τ---=-+对其离散化得:1111()(1)1Nt b z W z z a z---=-- 其中 11TT a e -=, 11(1)b K a =- N Tτ≈取整数。
史密斯预估控制系统设计扬州⼤学⽔利与能源动⼒⼯程学院课程设计报告题⽬:史密斯预估控制系统设计课程:计算机控制技术课程设计专业:电⽓⼯程及其⾃动化班级:电⽓1101姓名:学号:第⼀部分任务书《计算机控制技术》课程设计任务书⼀、课题名称史密斯预估控制系统设计⼆、课程设计⽬的课程设计是课程教学中的⼀项重要内容,是达到教学⽬标的重要环节,是综合性较强的实践教学环节,它对帮助学⽣全⾯牢固地掌握课堂教学内容、培养学⽣的实践和实际动⼿能⼒、提⾼学⽣全⾯素质具有很重要的意义。
《计算机控制技术》是⼀门理论性、实⽤性和实践性都很强的课程,课程设计环节应占有更加重要的地位。
计算机控制技术的课程设计是⼀个综合运⽤知识的过程,它需要控制理论、程序设计、硬件电路设计等⽅⾯的知识融合。
通过课程设计,加深对学⽣控制算法设计的认识,学会控制算法的实际应⽤,使学⽣从整体上了解计算机控制系统的实际组成,掌握计算机控制系统的整体设计⽅法和设计步骤,编程调试,为从事计算机控制系统的理论设计和系统的调试⼯作打下基础。
三、课程设计内容设计以89C51单⽚机和ADC 、DAC 等电路、由运放电路实现的被控对象构成的计算机单闭环反馈控制系统。
1. 硬件电路设计:89C51最⼩系统加上模⼊电路(⽤ADC0809等)和模出电路(⽤TLC7528和运放等);由运放实现的被控对象。
2. 控制算法:PID 控制加史密斯预估控制。
3. 软件设计:主程序、中断程序、A/D 转换程序、滤波程序、PID 控制加史密斯预估控制程序、D/A 输出程序等。
四、课程设计要求1. 模⼊电路能接受双极性电压输⼊(-5V~+5V ),模出电路能输出双极性电压(-5V~+5V )。
2. 模⼊电路⽤两个通道分别采集被控对象的输出和给定信号。
3. 每个同学选择不同的被控对象:5100.5 1.5(),()(1)(0.81)(1)(0.41)s sG s e G s e s s s s --==++++8810.5(),()(0.81)(0.41)(0.41)(0.51)s sG s e G s e s s s s --==++++581.52(),()(1)(0.21)(0.81)(0.21)s s G s e G s e s s s s --==++++5512(),()(0.81)(0.31)(0.81)(0.21)s s G s e G s e s s s s --==++++eτ-⽤软件通过数组单元移位实现。
绪论在现代科学的众多领域中,纯滞后对象的控制一直是人们研究的重要课题。
早期的研究主要是运用线性系统的经典方法对纯滞后系统进行分析设计。
譬如运用Nyquist法分析纯滞后系统的稳定性问题,用Pade近似方法将纯滞后环节近似为线性系统进行根轨迹的分析综合等。
但总的来说,当系统滞后时间较小时,只要我们设计时给予充分的考虑就可以了。
这时实际的控制效果不会与设计要求相去甚远。
对于滞后时间相对较大的系统,Smith提出了预估补偿的方法,通过补偿环节来消除或减弱闭环系统中纯滞后因素的影响。
只要对象的模型较精确,Smith方法的效果是比较理想的。
上世纪80年代起,随着自动控制理论、实践的深入发展和广泛应用,最优控制、鲁棒控制、变结构控制、H 控制以及预测控制等现代控制理论也逐步地应用到纯滞后的系统中来,并取得了一定的成果。
近几年来,以模糊控制技术、神经网络、专家系统和遗传算法为主要内容的智能控制技术,得到了充分的发展和广泛的应用。
尤其是它与传统的控制技术相结合,成功地解决了采用传统控制技术难以控制的控制对象(特别是对象模型难定的情况),在工程应用中有着强大的生命力并得到了广泛的应用。
本文通过纯滞后工艺过程描述了纯滞后系统的特性,从这个特性可以知道被控对象大多数都有纯滞后特性。
根据纯滞后控制系统的基本特点和纯滞后控制系统的设计以及纯滞后控制系统控制器参数整定等基础知识,并通过实例常规模糊控制器在纯滞后系统中的应用来理解和深化对纯滞后控制系统的理解。
1 纯滞后理论概述1.1 纯滞后相关定义及其工艺过程1.1.1 纯滞后相关定义所谓纯滞后是一种时间上的延迟,这种延迟是从引起动态要素变化的时刻到输出开始变化的时刻的这一段时间。
存在时间延迟的对象就称为具有纯滞后的对象,简称为纯滞后对象或滞后对象,实际被控对象大多数都有纯滞后特性。
被控对象时滞与其瞬态过程时间常数值比较大,采用通常的控制策略时,不能实现系统的精度控制,甚至会造成系统不稳定。
一.Smith预测器控制总策略随着社会的发展Smith预测器在水位控制中有着广泛的应用,应用预测器目前总的控制思想为闭环反馈控制,由经验知识可以知道闭环反馈方式是按偏差进行的,其特点是无论是什么原因使被控量偏离期望植而出现偏差时必定产生一个响应的控制作用去减少或消除这个偏差使被控量与期望值趋于一致,在电厂中的具体表现在水位的控制量在闭环控制的同时来实现期望与现实的差值从而实现理想的控制把工业的上的现实和理论保持一致,在电厂热工过程自动调节系统的闭环传递函数可写成:(1)其系统闭环特征方程式为:1+Wc (S)Wp(S)e-τs (2)由于特征方程中包含了seτ-,随着频率ω的增加,seτ-的相角无限减小,使系统的稳定范围大大缩小,为了保证系统稳定性,只能减小增益,使调节控制作用减弱,这样使系统响应速度慢,系统适应性较差。
Smith预测器的基本控制策略是:构造一个过程参考模型,将迟延环节seτ-移出系统闭环,使系统反馈信号不受seτ-的影响,使系统调节品质、稳定性等得到相应改善,系统响应速度提高。
原理如图1所示。
(a)(b)图1 具有Smith预测器的纯迟延补偿系统方框图由图1(a)可推导出闭环系统传递函数为:(3)其特征方程式为:1+Wc (S)Wp(S)=0 (4)特征方程式中不包含纯迟延环节seτ-,即回路中消去了纯迟延环节,所以调节器能够更加及时地进行调节。
系统的稳定范围大大增加,允许采用比较强的控制、较大调节增益,从而改善调节品质。
所以Smith 预测器的基本控制策略就是把难于控制的环节如纯迟延seτ-移到闭环之外,使其对系统稳定性没有影响。
如图1(b)所示。
二.Smith预测器应用2.1 Smith预测器在蒸汽温度自动控制的实现蒸汽温度自动控制系统如图2所示。
图2 蒸汽温度自动控制系统原理图其系统方框图如图3所示。
图3 蒸汽温度调节系统方框图图中θ(S)——主蒸汽温度;m(S)——喷水量;——调节对象即过热器传递函数;τ——迟延时间;Tc——时间常数与减温器型式和布置位置有关,对于中压汽包锅炉τ=170~200s,T c=210~280s——PID调节器传递函数δ——比例带;Ti ——积分时间;Td——微分时间;γθ——温度变送器传递系数。
《计算机控制》课程设计报告题目: Smith预估器控制设计姓名:《计算机控制》课程设计任务书指导教师签字:系(教研室)主任签字:2012年7月5 日Smith 预估器控制设计一、实验目的通过混合仿真实验,学习并掌握用于具有纯滞后系统的纯滞后补偿(Smith预估器控制)的设计及其实现。
二、实验内容被控对象为-512()2se G s s =+, 1.0s T =画出系统框图,设计Smith 数字预估器。
三、控制系统仿真 1.方案设计已知纯滞后负反馈控制系统,其中图1.其中D(s)为调节器传递函数,-512()2se G s s =+为对象传递函数,其中-5()sO G s e 包含纯滞后特性,纯滞后时间常数5τ=。
系统的特征方程为:5121()()1()02se D s G s D s s -+=+=+由于闭环特征方程中含有-5s e 项,产生纯滞后现象,/5/150.5m T τ==≥,采用常规的PID 控制会使系统稳定性变差,甚至产生振荡。
为了改善系统特性,引入Smith 预估器,使得闭环系统的特征方程中不含有-5s e 项。
Smith 纯滞后补偿的计算机控制系统:图 2.上图所示ZOH 为零阶保持器,传递函数为:se s G Tsh --1)(=,并且有:lT =τ(l为大于1的整数,T 为采样周期)。
由已知可知, 1.0T s =,则551l Tτ===。
2.负反馈调节器D(z)的确定D(z)为负反馈调节器,通常使用PID 控制规律。
使用扩充响应曲线法对数字PID 控制器进行参数整定。
扩充响应曲线法是在模拟PID 控制器响应曲线法的基础上推广应用到数字PID 控制器参数整定的方法。
扩充响应曲线法是用于具有纯滞后的一阶对象,由前面分析和已知: 1.0T s =,5τ=,5l =,1m T =,因此依据课本128页表4.2扩充响应曲线法整定PID 参数表选择数字PID 参数计算公式,由于1=0.25Tτ=,则选择控制度为1.20,控制规律为PI 控制,因此选定PI 参数为:0.78()pmK T τ=3.60iT τ=所以有:0.156p K = 18i T = 则控制器的传递函数为:i 110.1560.00867()(1)0.156(1)T 18p s D s K s s s+=+=+=⋅ 将得到的模拟控制器用一阶后向差分法离散化得到:1-1-1--1-10.7-717.0)-1(1|)()(1-z z z T T K s D z D i p Tz s =⋅+===】【 3.Smith 补偿器)z D (τ的确定Smith 纯滞后补偿的计算机控制系统的框图:图 3.sT Ks G m O ⋅+=1)( lT ≈τ spes G s G τ-)()(=s m Tsso h e s T s e K e s G s G s G ττ---)1()-1()()()(+==)-1)(()(-s p e s G s D ττ=)-11--11)(-1)(z -K(1 ])1(1[)-1)(z -K(1 )]-1()1()-1([)]([)(1--1--1--1---z ezz s T s Z z e s T s e K Z s D Z z D mT T lm ls m Ts =+=+==τττ令mT -T ea =,)-1(-mT T eK b =则有1--1--1)-1()(az z bz z D l =τSmith 预估器(纯滞后补偿器)的框图:图 4.)-1()()(-1l z z C z C =)()()az -(1)()z -(1c(k)1-11-1-l k u bz k c k c ==最后解得)1-()1-()()-(-)()(1111k ac k bu k c l k c k c k c +==由上一步所得的数据: 1.0T s =,5τ=,5l =,1m T =,12K =解得如下数据:1---110.368mT T a ee e ====1--1(1-)12(1-)7.584mT T b K e e ==⨯=则-1-5-17.584(1-)()1-0.368z z D z zτ=1111()()-(-5)()7.584(-1)0.368(-1)c k c k c k c k u k c k ==+由此可得到:11()7.584(-1)0.368(-1)-(-5)c k u k c k c k =+由此可见,Smith 补偿器的差分方程有1(-5)c k 项,即存在滞后5拍的信号,因此产生纯滞后信号对纯滞后补偿控制是至关重要的。
《计算机控制》课程设计报告题目: Smith预估器控制设计姓名:《计算机控制》课程设计任务书指导教师签字:系(教研室)主任签字:2012年7月5 日Smith 预估器控制设计一、实验目的通过混合仿真实验,学习并掌握用于具有纯滞后系统的纯滞后补偿(Smith预估器控制)的设计及其实现。
二、实验内容被控对象为-512()2se G s s =+, 1.0s T =画出系统框图,设计Smith 数字预估器。
三、控制系统仿真 1.方案设计已知纯滞后负反馈控制系统,其中图1.其中D(s)为调节器传递函数,-512()2se G s s =+为对象传递函数,其中-5()sO G s e 包含纯滞后特性,纯滞后时间常数5τ=。
系统的特征方程为:5121()()1()02se D s G s D s s -+=+=+由于闭环特征方程中含有-5s e 项,产生纯滞后现象,/5/150.5m T τ==≥,采用常规的PID 控制会使系统稳定性变差,甚至产生振荡。
为了改善系统特性,引入Smith 预估器,使得闭环系统的特征方程中不含有-5s e 项。
Smith 纯滞后补偿的计算机控制系统:图 2.上图所示ZOH 为零阶保持器,传递函数为:se s G Tsh --1)(=,并且有:lT =τ(l为大于1的整数,T 为采样周期)。
由已知可知, 1.0T s =,则551l Tτ===。
2.负反馈调节器D(z)的确定D(z)为负反馈调节器,通常使用PID 控制规律。
使用扩充响应曲线法对数字PID 控制器进行参数整定。
扩充响应曲线法是在模拟PID 控制器响应曲线法的基础上推广应用到数字PID 控制器参数整定的方法。
扩充响应曲线法是用于具有纯滞后的一阶对象,由前面分析和已知: 1.0T s =,5τ=,5l =,1m T =,因此依据课本128页表4.2扩充响应曲线法整定PID 参数表选择数字PID 参数计算公式,由于1=0.25Tτ=,则选择控制度为1.20,控制规律为PI 控制,因此选定PI 参数为:0.78()pmK T τ=3.60iT τ=所以有:0.156p K = 18i T = 则控制器的传递函数为:i 110.1560.00867()(1)0.156(1)T 18p s D s K s s s+=+=+=⋅ 将得到的模拟控制器用一阶后向差分法离散化得到:1-1-1--1-10.7-717.0)-1(1|)()(1-z z z T T K s D z D i p Tz s =⋅+===】【 3.Smith 补偿器)z D (τ的确定Smith 纯滞后补偿的计算机控制系统的框图:图 3.sT Ks G m O ⋅+=1)( lT ≈τ spes G s G τ-)()(=s m Tsso h e s T s e K e s G s G s G ττ---)1()-1()()()(+==)-1)(()(-s p e s G s D ττ=)-11--11)(-1)(z -K(1 ])1(1[)-1)(z -K(1 )]-1()1()-1([)]([)(1--1--1--1---z ezz s T s Z z e s T s e K Z s D Z z D mT T lm ls m Ts =+=+==τττ令mT -T ea =,)-1(-mT T eK b =则有1--1--1)-1()(az z bz z D l =τSmith 预估器(纯滞后补偿器)的框图:图 4.)-1()()(-1l z z C z C =)()()az -(1)()z -(1c(k)1-11-1-l k u bz k c k c ==最后解得)1-()1-()()-(-)()(1111k ac k bu k c l k c k c k c +==由上一步所得的数据: 1.0T s =,5τ=,5l =,1m T =,12K =解得如下数据:1---110.368mT T a ee e ====1--1(1-)12(1-)7.584mT T b K e e ==⨯=则-1-5-17.584(1-)()1-0.368z z D z zτ=1111()()-(-5)()7.584(-1)0.368(-1)c k c k c k c k u k c k ==+由此可得到:11()7.584(-1)0.368(-1)-(-5)c k u k c k c k =+由此可见,Smith 补偿器的差分方程有1(-5)c k 项,即存在滞后5拍的信号,因此产生纯滞后信号对纯滞后补偿控制是至关重要的。
纯滞后信号可以用存储单元法近似产生。
4.采用Matlab 系统仿真本系统采用PI 控制算法,用matlab 下的Simulink 工具箱搭建闭环系统结构,加以1V 的阶跃信号,PI 控制器系数0.156p K = ,18i T =,取反馈系数为1.使用Smith 预估补偿器的仿真结构得到输出曲线分别如图所示: 系统仿真结构框图为:图 5. 系统仿真波形图为:图 6.2.使用不带Smith预估补偿器的仿真结构得到输出曲线分别如图所示:系统仿真结构框图为:图 7.系统仿真波形图为:图8.分析:通过比较前后两次仿真的波形图可以看出,采用带Smith预估器控制的设计与传统的PID控制设计相比,大大的减少了响应曲线的超调,同时也加快了系统的响应过程,增加了系统的稳定性,使系统逐渐趋于稳定,达到了预期控制的目的。
四、电路设计及元件选型控制器部分需要AD转换器,DA转换器,反相器,运算放大器,单片机。
1.AD转换器AD转换器选择ADC0809, ADC0809是一种逐次逼近式的8路模拟输入,8路数字输出的A/D转换器,可以与单片机直接连接。
逐次逼近式速度较高,比较简单,而且价格也不是很高,因此是微型计算机应用系统中最为常用的一种A/D转换器。
AD转换器的电路设计:(1) 由于只需要一路信号,只选择IN-0输入,三根地址线固定接地,选择IN-0通道。
(2) 由于ADC0809需要500KHz的时钟源,利用单片机AT89S52的ALE引脚输出的脉冲信号其频率为单片机工作晶振的六分之一,此处单片机采用12MHz的晶振,则需经过4分频后供给ADC0809的CLK端。
(3)START脚为AD转换启动信号,高电平有效,由程序控制,故与单片机的P2.0脚通过非门相连。
(4)AD采样值为系统的偏差信号,有正负两种情况,故选择ADC0809的参考电压为正负5V。
(5)AD转换结束后,EOC脚输出高电平,此时单片机接收EOC信号,读取AD 转换的结果,将EOC脚经反相器与单片机的INT0脚相连。
AD转换结果由P0口读入,故将AD转换器的输出与单片机P0口相连,高低位依次相连经以上分析,设计AD转换器的接口电路如图所示:图9.注意:ADC0809对输入模拟量要求信号单极性,电压范围是0-5V,若信号太小,必须进行放大;输入模拟量在转换过程中应保持不变,若模拟量变化太快则需在输入前加采样保持电路。
2.DA转换器DA转换器选择DAC0832,DAC0832是具有两个输入数据寄存器的8位DAC,它能直接与51单片机相连,其主要特性为:a)分辨率为8位b)电流输出,稳定时间为1sc)可双缓冲输入,单缓冲输入或直接数字输入,单一电源供电DA转换器的电路设计:(1)参考电压选择+5V,直接与供电电源相连。
(2)选择DAC为单缓冲方式,即输入寄存器工作于受控状态,DAC寄存器处于直通状态,由DAC0832的引脚特性,将DAC0832的引脚接发如下:CS:片选端,低电平有效,直接接低电平ILE:数据锁存允许控制端,高电平有效,直接接高电平。
WR2:DAC寄存器写选通控制端,低电平有效,由于其处于直通状态,故直接接低。
XFER:数据传送控制,低电平有效,故直接接地。
WR1;第一级输入寄存器写选通控制,低电平有效。
其输入为上升沿时,将输入数据锁存到DAC寄存器,故将该脚与单片机P2.1口相连,由程序控制DA转换的时间。
(3) DA的八路输入,与单片机的P1口相连,高低位依次对应。
经以上分析,设计DA转换器的接口电路如图所示:图10.3.控制器设计控制器选择AT89C51单片机,根据ADC0809和DAC0832的特性,及上述分析,设计单片机与AD、DA的接口电路如下图所示:图 11.总控制电路图如下图所示:图 12.五、采用直接程序法1.单片机程序算法1.将带Smith 预估器控制的控制器的传递函数转化为差分方程: 11()7.584(-1)0.368(-1)-(-5)c k u k c k c k =+由于已求得110.1650.156()1z D z z ---=-根据)]()([)()(z C z E z D z U -⨯= 可得()(1)0.165()0.156(1)0.165()0.156(1)u k u k e k e k c k c k =-+---+- 则控制器的算法为:(1),11()7.584(-1)0.368(-1)-(-5)c k u k c k c k =+(2),()(1)0.165()0.156(1)0.165()0.156(1)u k u k e k e k c k c k =-+---+-2.由于系统的采样周期 1.0T s =在52单片机通过选用定时器T0工作在方式1下来实现,即16位定时计数器。
单片机采用12M 晶振,则其机器周期为1us 。
由公式ms us X 501-216=⨯)( 得初值03015536CB X X ==再通过20次循环实现 1.0T s =的采样延时。
2.程序流程图图13. 主程序流程图图 14. 中断服务程序流程图3.AT89C51的单片机C语言程序51单片机C语言程序代码:#include<reg51.h>#include<math.h>#define uchar unsigned char#define uint unsigned int#define ADC0809 P0;//AD0809的端口部分,P0为AD的数据接口;sbit AD_Start=P2^0;//开始转换信号有T0定时来控制;sbit DA_WR=P2^1;#define DAC0832 P1;//DAC0832的端口部分;P1为DA的数据接口;uchar C1K0,C1K1,C1K2,C1K3,C1K4,C1K5;uchar CK0,CK1;//分别为k,k-1时刻smith预估器的输出uchar UK0,UK1;//分别为k,k-1时刻的控制器的输出uchar EK0,EK1;//分别为k,k-1时刻的AD的输入uint i=0;main(){C1K0=C1K1=C1K2=C1K3=C1K3=C1K4=C1K5=0;UK0=UK1=0;CK1=0;EK1=0;DA_WR=0;TMOD=0X01; //定时器0控制方式1,16位的定时器计数器TL0=0XE0; //定时器初始化;TH0=0XB1;TR0=0; //关闭T0计时;ET0=1;PT0=1; //T0中断允许优先级;EX0=1;IT0=1; //触发方式,跳沿触发;P1=0X00; //先清零DA;TR0=1; //定时器开始计时,20ms转换一次;EA =1; //总中断开;while(1); //等待中断}void int_0(void) interrupt 0 //单片机中断处理程序;{EA=0;AD_Start=1;P0=EK0;C1K0=7.584*UK1+0.368*C1K1;CK0=C1K0-C1K5 ;C1K5= C1K4;C1K4= C1K3;C1K3= C1K2;C1K2= C1K1;C1K1= C1K0;UK0=UK1+0.165*EK0-0.156*EK1-0.165*CK0+0.156*CK1;UK1=UK0;CK1=CK0;EK1=EK0;UK0=P1;EA=1;}void inter_timer0()interrupt 1 //定时器0溢出中断;{EA=0;i=20; //循环20次实现1.0S采样for(i;i>0;i--){TL0=0XB0;TH0=0X3C; //延时50ms}AD_Start=0; //启动AD;EA=1;}六、设计工作总结及心得体会七、参考文献1.刘建昌等主编计算机控制系统科学出版社20092.张晋格主编控制系统CAD—基于MATLAB语言机械工业出版社2004.63.张毅刚主编单片机原理及应用高等教育出版社2003.12。