二阶系统
- 格式:ppt
- 大小:1.41 MB
- 文档页数:40
二阶系统案例
二阶系统案例包括弹簧阻尼系统、一维物块的运动、二阶熵、二阶控制系统的性能等。
1. 弹簧阻尼系统是一个典型的二阶系统,其中k为弹簧系数,B为阻尼系数。
通过分析其方程,可以得到系统的动态响应性能,如响应的快速性和逼近预期响应的程度。
2. 一维物块的运动是另一个二阶系统的实例,其中物块的位置和速度作为状态变量。
通过设计滑模控制器,可以将物块控制到原点。
3. 二阶熵是一个用于描述系统混乱程度的概念,可以用来描述人工智能系统的混乱程度。
4. 二阶控制系统的性能方面包括单位脉冲函数的输入和阶跃响应等,这些性能可以通过计算相关参数如上升时间、峰值时间和超调量等来衡量。
综上所述,二阶系统在多个领域中都有广泛应用,可以通过分析其方程和性能参数来深入了解其动态行为和性能。
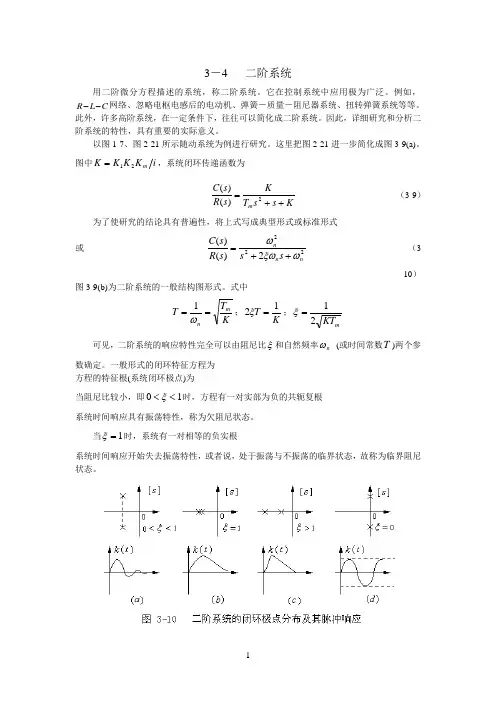
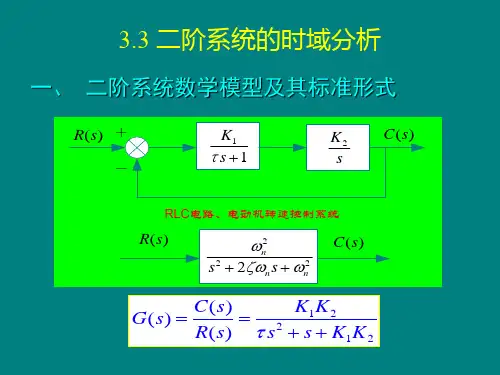
3-4 二阶系统用二阶微分方程描述的系统,称二阶系统。
它在控制系统中应用极为广泛。
例如,R L C --网络、忽略电枢电感后的电动机、弹簧-质量-阻尼器系统、扭转弹簧系统等等。
此外,许多高阶系统,在一定条件下,往往可以简化成二阶系统。
因此,详细研究和分析二阶系统的特性,具有重要的实际意义。
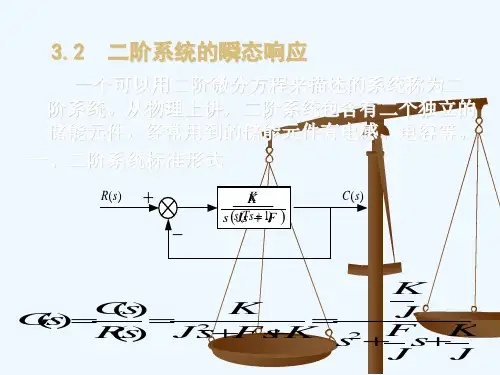
以图1-7、图2-21所示随动系统为例进行研究。
这里把图2-21进一步简化成图3-9(a)。
图中i K K K K m 21=,系统闭环传递函数为Ks s T K s R s C m ++=2)()( (3-9) 为了使研究的结论具有普遍性,将上式写成典型形式或标准形式或 2222)()(nn n s s s R s C ωξωω++= (3-10)图3-9(b)为二阶系统的一般结构图形式。
式中K T T m n ==ω1;K T 12=ξ;mKT 21=ξ 可见,二阶系统的响应特性完全可以由阻尼比ξ和自然频率n ω (或时间常数T )两个参数确定。
一般形式的闭环特征方程为方程的特征根(系统闭环极点)为当阻尼比较小,即10<<ξ时,方程有一对实部为负的共轭复根系统时间响应具有振荡特性,称为欠阻尼状态。
当1=ξ时,系统有一对相等的负实根系统时间响应开始失去振荡特性,或者说,处于振荡与不振荡的临界状态,故称为临界阻尼状态。
当阻尼比较大,即1>ξ时,系统有两个不相等的负实根这时系统时间响应具有单调特性,称为过阻尼状态。
当0=ξ时,系统有一对纯虚根,即n j s ω±=2,1,称为无阻尼状态。
系统时间响应为等幅振荡,其幅值取决于初始条件,而频率则取决于系统本身的参数。
上述各种情况对应的闭环极点分布及对应的脉冲响应,如图3-10所示。
下面分别研究欠阻尼和过阻尼两种情况的响应及其性能指标。
一、 二阶系统的阶跃响应1、欠阻尼二阶系统的单位阶跃响应 二阶系统中,欠阻尼二阶系统最为常见。
由于这种系统具有一对实部为负的共轭复根,时间响应呈现衰减振荡特性,故又称振荡环节。

二阶系统是控制系统中的一种重要模型,其数学表达式为dy/dt = c*y + u,其中c为二阶系统的阻尼系数,u为输入。
根轨迹图是二阶系统的一个重要特性,它展示了系统参数c与系统稳定性和性能之间的关系。
参数c决定了系统的阻尼程度和周期性。
当c>0时,系统是稳定的,且随着c的增加,系统的阻尼会减小,周期性也会减小,即系统的性能会变好。
当c<0时,系统是不稳定的,且随着c的减小,系统的周期性会增加,即系统的性能会变差。
根轨迹图是二阶系统的动态特性在s平面上的投影。
通过观察根轨迹图,可以了解系统的稳定性和性能。
根轨迹图的形状和位置取决于系统的参数c。
当c增加时,根轨迹图向-1/s轴移动,这意味着系统的阻尼和周期性减小,性能变好。
当c减少时,根轨迹图向虚轴移动,这意味着系统的稳定性受到影响,周期性增加,性能变差。
通过分析根轨迹图,可以确定控制系统设计的最佳参数。
例如,可以通过控制输入信号的频率和幅度来优化系统的性能。
在控制系统设计中,根轨迹图还可以用于确定反馈控制器的参数,以实现系统的稳定性和性能优化。
总之,二阶系统的根轨迹图是系统动态特性的重要表示,它提供了关于系统稳定性和性能的直观信息。
通过理解根轨迹图的形成和特点,可以更好地设计和优化控制系统,从而实现更好的动态性能和稳定性。
因此,对根轨迹图的理解和分析对于控制系统设计具有重要意义。
自控原理二阶系统自控原理是控制工程的基础知识之一,其中的二阶系统更是控制工程中的重要组成部分。
二阶系统通常由两个一阶系统级联或串联而成,具有比一阶系统更高的动态性能和控制精度。
在现实生活中,我们常常可以遇到二阶系统的例子。
比如,我们乘坐的汽车通常都是由发动机和传动系统来控制车辆的速度和行驶方向,这就是一个典型的二阶系统。
在这个系统中,发动机和传动系统分别起到加速和减速的作用,通过调节二者之间的协调关系来实现对汽车行驶状态的控制。
二阶系统的特点之一是具有振荡性。
在控制工程中,我们常常会遇到振荡现象,就好比一个摆动的钟摆。
这种振荡现象往往会对系统的稳定性产生负面影响,因此在设计二阶系统时需要注意对振荡进行控制。
控制二阶系统的一种常用方法是PID控制器,即比例-积分-微分控制器。
PID控制器通过对系统进行反馈调节,根据系统输出与期望输出之间的差异进行比例、积分和微分运算,从而实现对系统的精确调节和控制。
除了PID控制器,还有许多其他的控制方法可以应用于二阶系统。
例如,模糊控制和神经网络控制等,这些方法能够通过建立适当的数学模型来实现对二阶系统的控制。
在实际应用中,二阶系统广泛应用于各个领域,如航空航天、工业自动化、医疗仪器等等。
在飞行器中,二阶系统可以用来控制飞机的姿态和高度;在工业领域中,二阶系统可以用于控制机器人的运动和精确定位;在医疗仪器中,二阶系统可以用来控制心脏起搏器的工作频率和波形等。
总之,二阶系统作为自控原理中的重要组成部分,具备振荡性和动态性能较高的特点。
通过合理设计和选择控制方法,我们可以对二阶系统进行精确的调节和控制,从而实现对系统的稳定性和性能的优化。
在实际应用中,我们可以根据具体情况选择适当的控制方法,以满足系统的要求,提高生产效率和工作质量。
二阶系统课程设计一、教学目标本课程的教学目标是使学生掌握二阶系统的理论知识,能够运用二阶系统解决实际问题。
具体分为以下三个部分:1.知识目标:学生需要掌握二阶系统的定义、特点和应用;了解二阶系统的求解方法和相关理论。
2.技能目标:学生能够运用二阶系统的理论知识分析和解决实际问题;能够熟练使用相关软件工具进行二阶系统的分析和设计。
3.情感态度价值观目标:培养学生对科学研究的兴趣和热情,提高学生的问题解决能力和创新意识。
二、教学内容根据课程目标,本课程的教学内容主要包括以下几个部分:1.二阶系统的定义和特点:介绍二阶系统的定义、特点和应用领域,使学生了解二阶系统的基本概念。
2.二阶系统的求解方法:讲解二阶系统的求解方法,包括解析法和数值法,让学生学会求解二阶系统的方法。
3.二阶系统的分析和设计:介绍二阶系统的分析和设计方法,使学生能够运用二阶系统解决实际问题。
4.相关软件工具的使用:教授相关软件工具的使用方法,让学生能够熟练使用工具进行二阶系统的分析和设计。
三、教学方法为了实现课程目标,本课程将采用多种教学方法,包括:1.讲授法:通过讲解二阶系统的理论知识,使学生掌握基本概念和理论。
2.讨论法:学生进行小组讨论,引导学生主动思考和探索,提高问题解决能力。
3.案例分析法:分析实际案例,让学生学会将理论知识应用于实际问题的分析和设计中。
4.实验法:让学生动手进行实验,培养学生的实践能力和创新意识。
四、教学资源为了支持课程内容和教学方法的实施,本课程将准备以下教学资源:1.教材:选用权威、实用的教材,为学生提供系统的理论知识学习。
2.参考书:提供相关领域的参考书,丰富学生的知识体系。
3.多媒体资料:制作精美的多媒体课件,提高学生的学习兴趣和效果。
4.实验设备:准备实验所需的设备,让学生能够进行实践活动,提高实践能力。
五、教学评估本课程的评估方式包括平时表现、作业、考试等多个方面,以全面、客观、公正地评价学生的学习成果。
二阶欠阻尼系统冲激响应曲线二阶欠阻尼系统冲激响应曲线一、引言在探讨二阶欠阻尼系统冲激响应曲线之前,我们首先需要了解什么是二阶系统,欠阻尼系统以及冲激响应曲线。
在工程控制系统中,二阶系统是一种常见的动态系统,而欠阻尼系统则是指系统的阻尼比较小的情况。
冲激响应曲线则是描述系统对冲激信号的输出响应情况。
通过本文的深入探讨,我们将更好地理解二阶欠阻尼系统冲激响应曲线的特性和意义。
二、二阶系统的基本特性1. 二阶系统的定义在控制工程中,二阶系统是指系统的传递函数具有二次项的动态系统。
它可以用以下的微分方程表示:\[M\ddot{x} + C\dot{x} + Kx = F(t)\]其中,\(M\)、\(C\)、\(K\)分别表示系统的质量、阻尼和刚度,\(F(t)\)表示外部输入信号。
传递函数通常可以表示为:\[G(s) = \frac{Y(s)}{F(s)} = \frac{1}{Ms^2 + Cs + K}\]2. 二阶系统的特性二阶系统具有的特性包括:共振频率、阻尼比以及自然频率。
在理解二阶系统的基本特性后,我们可以更好地探讨欠阻尼系统对其冲激响应曲线的影响。
三、欠阻尼系统的特性1. 欠阻尼系统的定义欠阻尼系统是指系统的阻尼比较小的情况,通常表现为振荡幅值较大、持续时间较长的特点。
在二阶系统中,欠阻尼将对系统的响应产生重要影响。
2. 欠阻尼系统的影响欠阻尼系统对系统响应的影响主要表现在振荡频率、振荡幅值以及响应持续时间上。
在冲激响应曲线中,我们将看到欠阻尼系统的特殊表现。
四、冲激响应曲线的特性1. 冲激响应曲线的定义冲激响应曲线是描述系统对冲激信号的响应情况的曲线。
通过冲激响应曲线,我们可以了解系统的动态特性和稳定性。
2. 冲激响应曲线的特性冲激响应曲线的特性包括:初始值、幅值、振荡频率以及响应持续时间。
在二阶欠阻尼系统中,冲激响应曲线将表现出特殊的形态和特征。
五、二阶欠阻尼系统冲激响应曲线的特点分析1. 冲激响应曲线的形态在二阶欠阻尼系统中,冲激响应曲线将呈现出振荡幅值较大、持续时间较长的特点。
二阶系统的概念
二阶系统是指系统的动态特性可以由二阶(second-order)微分方程描述的系统。
这种系统的动态行为通常包括惯性和阻尼,可以在控制系统、信号处理、电气工程等领域中找到。
在控制系统中,二阶系统通常通过其阻尼比(damping ratio)和自然频率(natural frequency)来描述。
阻尼比反映了系统振荡的衰减程度,而自然频率则表示系统的固有振荡频率。
二阶系统的响应可以分为三种情况:过阻尼(overdamped)、临界阻尼(critically damped)和欠阻尼(underdamped)。
这些特性影响着系统的稳定性、响应速度和振荡行为。
在信号处理中,二阶系统也经常用于建模滤波器的动态行为。
二阶滤波器可以有不同的频率响应和阻尼特性,适用于各种信号处理应用。
总体而言,二阶系统是一类常见的动态系统,通过数学建模和分析,可以更好地理解和设计控制系统、滤波器以及其他工程应用。