最小二乘法参数估计
- 格式:doc
- 大小:164.50 KB
- 文档页数:12
参数估计最小二乘法
参数估计最小二乘法是一种常用的数据分析方法,它基于最小化观测值和理论值之间的差距来估计未知参数。
该方法广泛应用于回归分析、时间序列分析和信号处理等领域。
在回归分析中,最小二乘法被用来估计自变量与因变量之间的线性关系。
我们假设有n个观测值(x1,y1),(x2,y2),...,(xn,yn),并
且自变量x与因变量y之间存在一个线性关系y = a + bx,其中a
和b是未知参数。
最小二乘法的目标是找到最优的a和b值,使得所有观测值与拟合直线之间的误差平方和最小。
时间序列分析中,最小二乘法可以用来拟合趋势线和周期性变化。
通过将时间序列数据拟合成一个函数形式,我们可以预测未来的值和进行周期性分析。
在信号处理中,最小二乘法常被用于滤波和去噪。
通过估计信号中的噪声和信号成分,我们可以使用最小二乘法来去除噪声并提取有效信息。
总之,最小二乘法是一种重要的参数估计方法,它可以用来分析各种类型的数据并预测未来的值。
在实际应用中,我们需要注意数据的质量和拟合模型的合理性,以获得可靠的结果。
- 1 -。
最小二乘法参数估计量推导最小二乘法,这个名字听上去挺高深的,其实就是一种简单而强大的数学工具,广泛应用于数据分析中。
今天,我们就来聊聊这玩意儿到底是怎么一回事。
1. 什么是最小二乘法最小二乘法其实就是在做“找差距”的工作。
假设你有一堆数据点,比如说你测量了一系列的温度和对应的电力消耗,你的目标是找到一条最能贴合这些数据点的直线。
这条直线就像是你为数据“量体裁衣”的结果。
1.1. 基本思想最小二乘法的核心思想就是:找到一条直线,使得每一个数据点到这条直线的距离(叫做“残差”)的平方和最小。
这个“平方和”就像是把所有的偏差加起来,让它们不再那么“任性”。
1.2. 为什么用“平方”?那为什么要把这些偏差平方呢?因为平方能有效地放大大的误差,这样我们就不容易忽视它们。
就像打麻将,偏差大的牌更容易被看见,才能让我们在游戏中更精准地调整策略。
2. 数学推导好啦,接下来我们就来捋一捋这个过程。
咱们还是从简单的说起:假设你有一组数据点(x₁, y₁)、(x₂, y₂)、……、(xₙ, yₙ),而你要找的是一条直线y = β₀ + β₁x。
这条直线就是我们的“理想之线”。
2.1. 定义目标函数我们的目标就是最小化所有这些点到直线的距离平方和。
用数学的语言来描述,就是要最小化目标函数:[ S(beta_0, beta_1) = sum_{i=1}^n (y_i beta_0 beta_1 x_i)^2 ]。
这里面,(y_i beta_0 beta_1 x_i)就是每一个点到直线的距离,平方了之后就能让误差更加明显。
2.2. 求导数为了找到最小值,我们需要对目标函数进行求导数,然后让导数等于零。
这个过程就像是找到山顶的最低点一样。
我们分别对β₀和β₁求偏导数,然后设定这些偏导数为零,得到两个方程:[ frac{partial S}{partial beta_0} = 0 ]。
[ frac{partial S}{partial beta_1} = 0 ]。
用最小二乘法估计模型参数最小二乘法是一种参数估计方法,常用于拟合线性回归模型。
该方法通过最小化观测值与模型预测值之间的差异来确定模型的参数。
本文将详细介绍最小二乘法的原理、应用领域以及具体操作步骤,以期为读者提供有关该方法的生动、全面且有实际指导意义的文章。
一、最小二乘法原理最小二乘法最初由法国数学家勒让德于18世纪提出,其核心思想是选择能够最小化观测值与模型预测值之间残差的参数。
残差是观测值与模型预测值之间的差异,这些差异可用来评估模型的拟合程度。
最小二乘法的目标是找到使残差平方和最小化的参数,从而得到最佳拟合效果。
二、最小二乘法的应用领域最小二乘法广泛应用于各个领域,尤其是数理统计学、经济学、工程学和社会科学等领域。
在这些领域,研究人员经常需要通过观测数据来拟合数学模型,并利用最小二乘法来估计模型的参数。
例如,在经济学中,研究人员可以利用最小二乘法来估计市场需求曲线和供应曲线的参数,从而预测市场价格和销售量的变化。
三、最小二乘法的具体操作步骤1. 收集观测数据:首先,需要收集一组相关的观测数据,这些数据是建立数学模型的基础。
2. 选择模型:根据实际问题的需要,选择适当的数学模型来描述观测数据之间的关系。
常见的模型包括线性模型、多项式模型和指数模型等。
3. 确定目标函数:目标函数是最小二乘法的核心,其定义为观测值与模型预测值之间残差的平方和。
通过最小化目标函数,可以找到最佳拟合效果的参数。
4. 求解参数:利用数学方法,对目标函数进行求解,求得最小化目标函数的模型参数。
常用的求解方法包括求导、矩阵运算和数值优化算法等。
5. 模型评估:为了评估拟合效果,需要对模型进行验证。
常用的方法有计算残差平方和、拟合优度和假设检验等。
6. 参数解释和预测:最后,根据所得到的模型参数,解释模型的物理含义,并利用模型进行预测和推断。
通过上述步骤,我们可以利用最小二乘法对观测数据进行拟合,并估计模型的参数。
最小二乘法不仅在理论研究中有重要应用,而且在实际问题的解决中也扮演着重要的角色。

2. (1)用最小二乘法,求参数估计量.由于21^)(∑-=ni iy yQ ,=21^1^0)]([∑+-ni ix yββ(i i x y ^1^0^ββ+= )我们可以知道,Q 是^1^0,ββ的二次函数并且是非负数.所以Q 的极小值总是存在的.(为什么?) 根据极值存在的必要条件知,⎪⎪⎩⎪⎪⎨⎧=∂∂=∂∂001^0^ββQ Q(为什么不是充分条件?)由此,不难推得:⎪⎩⎪⎨⎧=-+=-+∑∑0)(0)(^1^0^1^0i i i i i x y x y x ββββ(4) 进而得到:⎪⎩⎪⎨⎧+=+=∑∑∑∑∑2^1^0^1^0i i i i i i x x x y x n y ββββ(5)于是解得(怎么解?)⎪⎪⎩⎪⎪⎨⎧--=--=∑∑∑∑∑∑∑∑∑∑∑22^1222^0)()(i i i i i i i i i i i i i x x n x y x y n x x n x y x y x ββ(6)另外,可以将公式(6)简化变形得⎪⎪⎩⎪⎪⎨⎧-==∑∑∙∙∙__^1__^02^1xy x y x i i i βββ(7)其中,____;yy y x x x i i i -=-=∙∙ny y nx x ii∑∑==____;(2)求随机误差项方差的估计量.记^i i i y y e -=为第i 个样本观测值的残差.即被解释变量的观测值与估计值之差.则随机误差项方差的估计量为:222-=∑n ie μσ(8)证明从略.至此, 普通最小二乘法一元线性回归模型的参数估计问题得到解决.。
---------------------------------------------------------------最新资料推荐------------------------------------------------------ 第四章参数的最小二乘法估计第四章参数的最小二乘法估计第四章最小二乘法与组合测量 1 概述最小二乘法是用于数据处理和误差估计中的一个很得力的数学工具。
对于从事精密科学实验的人们来说,应用最小乘法来解决一些实际问题,仍是目前必不可少的手段。
例如,取重复测量数据的算术平均值作为测量的结果,就是依据了使残差的平方和为最小的原则,又如,在本章将要用最小二乘法来解决一类组合测量的问题。
另外,常遇到用实验方法来拟合经验公式,这是后面一章回归分析方法的内容,它也是以最小二乘法原理为基础。
最小二乘法的发展已经经历了 200 多年的历史,它最先起源于天文和大地测量的需要,其后在许多科学领域里获得了广泛应用,特别是近代矩阵理论与电子计算机相结合,使最小二乘法不断地发展而久盛不衰。
本章只介绍经典的最小二乘法及其在组合测量中的一些简单的应用,一些深入的内容可参阅专门的书籍和文献。
2 最小二乘法原理最小二乘法的产生是为了解决从一组测量值中寻求最可信赖值的问题。
对某量 x 测量一组数据 x1, x2, , xn,假设数据中不存在系统误差和粗大误差,相互独立,服从正态分布,它们的标准偏1 / 22差依次为:1, 2, n 记最可信赖值为,相应的残差 vi xi 。
测值落入(xi, xi dx) 的概率。
vi21Pi exp( 2) dx 2 i i2 根据概率乘法定理,测量x1, x2, , xn 同时出现的概率为 P Pi vi211n exp[ () ](dx) n2ii i() 显然,最可信赖值应使出现的概率 P 为最大,即使上式中页指数中的因子达最小,即ivi22 i Min 2 o1 权因子:wi 2 即权因子 wi2,则i i 2[wvv] wvii Min 再用微分法,得最可信赖值wxi 1 nii 即加权算术平均值w i 1i 这里为了与概率符号区别,以i 表示权因子。
最小二乘估计的推导最小二乘估计是一种常用的参数估计方法,尤其在统计学和经济学领域得到广泛应用。
它的推导涉及到一些数学推理和统计原理,我将在本文中逐步解释和展示最小二乘估计的推导过程,并探讨其应用和优势。
1. 引言最小二乘估计是一种通过最小化观测值与预测值之间的差异来估计参数的方法。
它的基本思想是找到一组参数值,使得观测值与对应的预测值之间的平方差最小化。
这种方法在数据分析和回归分析中非常有用,因为它能够提供可靠的参数估计和预测模型。
2. 最小二乘估计的基本原理最小二乘估计的推导涉及到线性回归模型,即因变量Y与自变量X之间的线性关系。
假设我们有n个观测值,表示为(Xi,Yi),i=1,2,...,n。
我们的目标是找到一条直线Y=aX+b,使得所有观测值到这条直线的距离之和最小化。
距离的平方和可以表示为:S = Σ(Yi - (aXi + b))²我们的目标是最小化这个平方和。
为了找到最优的参数估计,我们需要找到使得S最小的a和b的值。
3. 最小化平方和我们可以通过对S求导,令导数等于零,来求解a和b的值。
具体地,我们分别对a和b求导,并令导数等于零:∂S/∂a = -2ΣXi(Yi - (aXi + b)) = 0∂S/∂b = -2Σ(Yi - (aXi + b)) = 0通过求解以上两个方程,我们可以得到最小二乘估计的闭合解:a = (ΣXiYi - n X̄Ȳ) / (ΣXi² - n X̄²)b = Ȳ - a X̄其中,X̄和Ȳ分别表示X和Y的均值,Σ表示求和符号。
4. 应用和优势最小二乘估计在实际应用中具有广泛的用途。
在经济学中,我们可以通过最小二乘估计来估计需求曲线和供给曲线的参数,从而预测市场的走势和变化。
在统计学中,最小二乘估计可以用于拟合数据并构建预测模型。
它是最经典的回归分析方法之一,可用于解释和预测变量之间的关系。
最小二乘估计具有一些优势。

加权最小二乘法参数估计量表达式
加权最小二乘法是一种在线性回归中用于估计参数的方法,它考虑了每个数据点的权重。
在加权最小二乘法中,参数估计量的表达式可以通过以下步骤得到:
1. 假设我们有一个线性回归模型:Y = Xβ + ε,其中Y是因变量,X是自变量的矩阵,β是要估计的参数向量,ε是误差向量。
2. 假设我们有n个数据点,每个数据点都有一个权重wi。
则加权最小二乘法的目标是最小化加权残差平方和:
min Σwi(Yi - Xiβ)^2
其中Σ表示求和,wi是第i个数据点的权重,Yi是第i个数据点的观测值,Xi是第i个数据点对应的自变量向量。
3. 通过求解上述目标函数的最小化问题,可以得到参数估计量的表达式:
β = (X^TWX)^-1X^TWY
其中,X^T表示X的转置矩阵,W是一个对角矩阵,其对角线元素为数据点的权重。
这就是加权最小二乘法参数估计量的表达式。
通过这个表达式,可以计算出最优的参数估计量,使得加权残差平方和最小化。
最小二乘法求解参数
最小二乘法来估计参数,就是使得实际值与估计值的差距的平方最小。
β可以被已知的未知数计算得到是无偏估计的值。
但是用最小二乘法可以得到最好的线性无偏估计量,因为变异比较小。
所以这种方法就是最稳定的最通用的方法。
如果只有一个β1,也就是只有y与x1,则使用两样本t检验和回归分析是一样的。
因为两样本t检验就可以计算β的置信区间,因此也可以在该回归方程中。
另一种估计参数方法是最大似然函数,用此法估计参数值是一样的,但是仅对于y是连续值情况。
采用最小二乘估计式可以得到简单线性回归模型参数的估计量。
但是估计量参数与总体真实参数的接近程度如何。
在工程物理、化学工程、生物医学、统计学、经济学、信号处理、自动化、测绘学等领域中,许多问题都可归结为求解矩阵方程Ax=b 的问题。
通过计算机仿真说明了在模型中所有变量均具有不可忽略的误差时,全最小二乘法得到的参数估计更接近。
除了线性均方估计外,最小二乘估计是另一种不需要任何先验知识的参数估计方法,最小二乘估计不需要先验统计特性,适用范围更广。
、、。
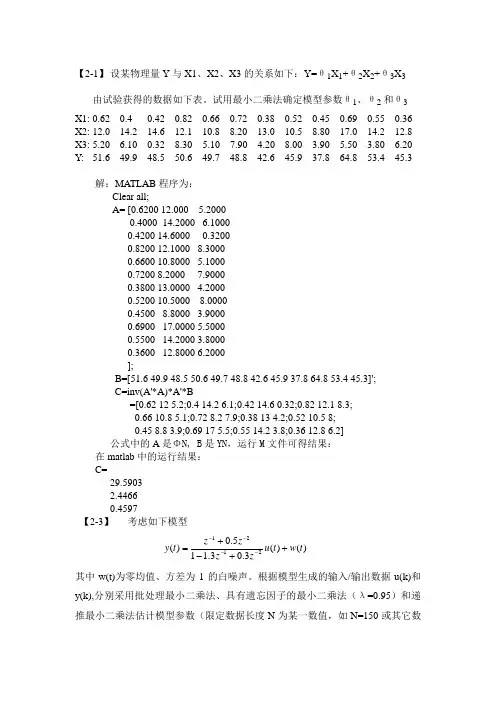
【2-1】 设某物理量Y 与X1、X2、X3的关系如下:Y=θ1X 1+θ2X 2+θ3X 3 由试验获得的数据如下表。
试用最小二乘法确定模型参数θ1、θ2和θ3 X1: 0.62 0.4 0.42 0.82 0.66 0.72 0.38 0.52 0.45 0.69 0.55 0.36 X2: 12.0 14.2 14.6 12.1 10.8 8.20 13.0 10.5 8.80 17.0 14.2 12.8 X3: 5.20 6.10 0.32 8.30 5.10 7.90 4.20 8.00 3.90 5.50 3.80 6.20 Y: 51.6 49.9 48.5 50.6 49.7 48.8 42.6 45.9 37.8 64.8 53.4 45.3解:MATLAB 程序为:Clear all;A= [0.6200 12.000 5.20000.4000 14.2000 6.10000.4200 14.6000 0.32000.8200 12.1000 8.30000.6600 10.8000 5.10000.7200 8.2000 7.90000.3800 13.0000 4.20000.5200 10.5000 8.00000.4500 8.8000 3.90000.6900 17.0000 5.50000.5500 14.2000 3.80000.3600 12.8000 6.2000];B=[51.6 49.9 48.5 50.6 49.7 48.8 42.6 45.9 37.8 64.8 53.4 45.3]';C=inv(A'*A)*A'*B=[0.62 12 5.2;0.4 14.2 6.1;0.42 14.6 0.32;0.82 12.1 8.3;0.66 10.8 5.1;0.72 8.2 7.9;0.38 13 4.2;0.52 10.5 8;0.45 8.8 3.9;0.69 17 5.5;0.55 14.2 3.8;0.36 12.8 6.2]公式中的A 是ΦN, B 是YN ,运行M 文件可得结果:在matlab 中的运行结果:C=29.59032.44660.4597【2-3】 考虑如下模型)()(3.03.115.0)(2121t w t u z z z z t y ++-+=---- 其中w(t)为零均值、方差为1的白噪声。
参数估计的最小二乘法参数估计的最小二乘法,这可真是个有趣的概念。
想象一下,你在一家咖啡店,手里捧着一杯香浓的拿铁,四周都是热闹的人群。
突然,你发现大家都在讨论数据和统计,听上去有点深奥,但其实并不复杂。
最小二乘法,顾名思义,就是把那些误差降到最低,简单来说,就是找出一个最好的拟合线,让这条线尽可能靠近所有的点。
你可以把它想象成一场比赛,谁能把线条画得最漂亮,谁就能赢得喝咖啡的机会。
咱们先聊聊这个方法的背后原理。
最小二乘法的核心就是让每一个数据点到拟合线的距离,尽量小。
想象一下你在踢足球,每次射门都希望把球踢进球门。
可惜球门不是一成不变的,风、雨、地面都可能影响你。
这时候,你得找出一个最优的射门角度和力度,就像在数据分析中,寻找一个最佳的参数一样。
别小看这点距离,虽然看似微不足道,但如果积累起来,就能形成一条清晰的趋势线,帮助你看清楚数据背后的故事。
我们就得聊聊这个“误差”的问题。
每个点都有可能偏离理想的线,不同的误差就像不同的风格。
有的人喜欢简单明了,有的人则爱复杂多变。
最小二乘法就是为了平衡这些风格,让所有的点都能在一条线上找到归属。
就像在聚会上,大家有不同的个性,但都能找到共同话题,聊得热火朝天。
这个方法不偏不倚,努力把每一个点都拉到同一个和谐的大家庭里。
说到应用,那可真是无处不在。
想象你在做一份报告,得用到很多数据分析。
最小二乘法能帮你快速找到数据之间的关系。
就像你在料理时,想找出最好的调味配方,先试几种组合,然后找到那个让人一口就爱的味道。
通过最小二乘法,你可以得出一个回归方程,轻轻松松告诉别人,什么因素是关键,什么因素则是“浮云”。
所以,这种方法特别适合在商业、科学研究等领域,简直是个好帮手。
使用最小二乘法也不是没有挑战。
就像你在做一道数学题,有时可能会遇到瓶颈。
数据如果有噪声、异常值,那结果可就大打折扣。
比如,你在咖啡店点了一杯特饮,结果它的味道比你想象的要甜得多。
最小二乘法也会遇到这种情况,偏离的点会影响整体的拟合结果。
运用最小二乘法进行土木工程中混凝土容重的识别设实测某一施工阶段主梁m 个节段的挠度为向量R ,如公式(1)中所示。
[](1),(2),,()TR R R R m =⋅⋅⋅ (1)其中,R (1),R (2),……R (m )分别表示第1节段、第2节段、……、第m 个节段前端的挠度;该施工节段对应的理想状态的理论计算挠度(模型中的结果)为: [](1),(2),,()T C C C C m =⋅⋅⋅ (2)其中,C (1),C (2),……C (m )分别表示第1节段、第2节段、……、第m 个节段前端的计算挠度值,可以通过前后两个施工阶段的变形差得到;那么,R 与C 之前肯定存在一定的偏差,从而形成一误差向量S ,表达式如(3)、(4)所示:[](1),(2),()T S S S S m =⋅⋅⋅ (3)S C R =- (4)其中,S (1)=C (1)-R (1),S (2)=C (2)-R (2),……,S (m )=C (m )-R (m ),也即将对应节段的理论值与实际值相减;设待识别的参数为:[(1),(2),()]T n θθθθ= (5)其中,n 为参数误差识别的项数,而θ为参数的误差量。
由于θ引起的各节段挠度误差为向量s :[](1),(2),,()Ts s s s m =⋅⋅⋅ (6) s φθ= (7) 1111n m mn φφφφφ⎛⎫ ⎪ ⎪ ⎪⎝⎭= (8) 其中,φ为从参数误差θ到s 的一个线性转换矩阵,令向量θ为单位向量的时候,也即在模型中取参数的变化为单位1的变化,这样,就可以通过s 的变化得到φ的具体数值。
定义残差ε为:S s S εφθ=-=- (9) 残差包含了测量误差、参数估计误差及系统误差等因素在内。
从而可以得到:S φθε=+ (10) 方差:()()T T J S S εεφθφθ==-- (11)当0J θ∂=∂,即1()0T T S θφφφ--=时,J 达到最小,因此,θ的最小二乘估计为: ^1()T T S θφφφ-= (12)由于各个参数对于结构的影响各不相同,因此,在求算θ的最小二乘估计时,再引入重要性系数,即权重系数Λ。
普通最小二乘法(OLS )普通最小二乘法(Ordinary Least Square ,简称OLS ),是应用最多的参数估计方法,也是从最小二乘原理出发的其他估计方法的基础,是必须熟练掌握的一种方法。
在已经获得样本观测值i i x y ,(i=1,2,…,n )的情况下(见图2.2.1中的散点),假如模型(2.2.1)的参数估计量已经求得到,为^0β和^1β,并且是最合理的参数估计量,那么直线方程(见图2.2.1中的直线) i i x y ^1^0^ββ+= i=1,2,…,n (2.2.2)应该能够最好地拟合样本数据。
其中^i y 为被解释变量的估计值,它是由参数估计量和解释变量的观测值计算得到的。
那么,被解释变量的估计值与观测值应该在总体上最为接近,判断的标准是二者之差的平方和最小。
),()(1022101ββββQ u x y Q i i n i i ==--=∑∑= ()()),(min ˆˆˆˆ102110212ˆ,ˆ1100ββββββββQ x y y y u Q n i i n i i i =--=-==∑∑∑== (2.2.3)为什么用平方和?因为二者之差可正可负,简单求和可能将很大的误差抵消掉,只有平方和才能反映二者在总体上的接近程度。
这就是最小二乘原则。
那么,就可以从最小二乘原则和样本观测值出发,求得参数估计量。
由于21^1^012^))(()(∑∑+--=n i i n i i x y y y Q ββ= 是^0β、^1β的二次函数并且非负,所以其极小值总是存在的。
根据罗彼塔法则,当Q 对^0β、^1β的一阶偏导数为0时,Q 达到最小。
即0011001100ˆ,ˆ1ˆ,ˆ0=∂∂=∂∂====ββββββββββQQ(2.2.4)容易推得特征方程: ()0)ˆˆ(0ˆ)ˆˆ(101110==--==-=--∑∑∑∑∑==i i i i ni ii i i i n i i e x x yx e y y x yββββ 解得: ∑∑∑∑∑+=+=2^1^0^1^0i i i i i i x x x y xn y ββββ (2.2.5) 所以有:⎪⎪⎪⎩⎪⎪⎪⎨⎧-=---=--=∑∑∑∑∑∑∑=======x y x x y y x x x x n y x y x n n i i n i i i n i i n i i n i i n i i n i i i 1012121121111ˆˆ)())(()()()(ˆβββ (2.2.6) 于是得到了符合最小二乘原则的参数估计量。
最小二乘法参数估计公式在统计学和经济学中,最小二乘法是一种常用的参数估计方法。
它的目标是找到最能拟合数据的参数值,使得拟合曲线与观测值之间的误差最小。
最小二乘法参数估计公式是最小化误差平方和的一种数学表达方式。
最小二乘法参数估计公式可以用来解决线性回归问题。
线性回归是一种建立因变量与自变量之间关系的模型方法。
在线性回归中,我们假设因变量与自变量之间存在一种线性关系,可以通过最小二乘法来估计线性回归模型的参数。
最小二乘法参数估计公式可以用于求解线性回归模型的截距项和斜率项。
在线性回归模型中,截距项代表了当自变量为零时,因变量的取值;而斜率项代表了因变量对自变量的响应程度。
通过最小二乘法参数估计公式,我们可以找到最优的截距项和斜率项,使得拟合曲线与观测值之间的误差最小。
最小二乘法参数估计公式的推导过程是通过最小化误差平方和来实现的。
误差平方和是观测值与拟合值之间差异的平方累加,通过最小化误差平方和,我们可以找到使得误差最小的参数值。
最小二乘法参数估计公式的数学表达如下:β = (X'X)^-1X'Y其中,β表示参数向量,X表示自变量的设计矩阵,Y表示因变量的向量。
该公式通过求解矩阵的逆来计算参数向量。
最小二乘法参数估计公式的求解过程需要满足一些假设条件。
首先,我们假设误差项满足正态分布,并且具有零均值和常数方差。
其次,我们假设自变量之间不存在多重共线性,即设计矩阵X的列之间线性无关。
最后,我们假设误差项与自变量之间不存在相关性。
最小二乘法参数估计公式在实际问题中有着广泛的应用。
例如,在经济学中,我们可以使用最小二乘法来估计供给曲线和需求曲线的参数,从而分析市场的均衡和价格变动。
在金融学中,我们可以使用最小二乘法来估计资产收益率的参数,从而进行投资组合的优化和风险管理。
在医学研究中,我们可以使用最小二乘法来估计药物的剂量与效果之间的关系,从而确定最佳的治疗方案。
最小二乘法参数估计公式是一种常用的统计方法,在各个领域中都有广泛的应用。
第四章参数的最小二乘法估计分解在这种方法中,我们假设有一个已知的数学模型,该模型包含一些未知参数。
我们的目标是根据已有的观测值,找到最优的参数值,使得模型给出的理论预测值与实际观测值之间的误差最小。
最小二乘法的核心思想是根据实际观测值和模型的预测值之间的差异,定义一个误差函数,并通过最小化该误差函数,确定最优的参数值。
常用的误差函数是残差平方和,也称为平方误差和。
在最小二乘法中,我们假设有一组实际观测值y(y),y=1,2,…,y,以及一个数学模型y(y)=y(y;y1,y2,...,yy),其中y是自变量,yyyy(y)为因变量,y1,y2,...,yy为未知参数。
我们的目标是找到最优的参数值y1^*,y2^*,...,yy^*,使得误差函数ℒ(y1,y2,...,yy)最小化。
误差函数的定义为:ℒ(y1,y2,...,yy)=Σ(y(y)-y(y(y);y1,y2,...,yy))^2其中y(y)为实际观测值,y(y(y);y1,y2,...,yy)为模型的理论预测值。
为了找到最优参数值,我们需要对误差函数进行最小化,即求解参数值使得误差函数的导数为零。
这可以通过求解误差函数的偏导数,并解一个线性方程组得到最优参数值。
最小二乘法估计分解的关键步骤如下:1.根据已有的观测值和数学模型,定义误差函数。
2.对误差函数进行偏导数求解,得到一组方程。
3.将方程转化为矩阵形式,并求解线性方程组,得到最优参数值。
4.将最优参数值代入数学模型,得到对观测值的理论预测值。
5.检验预测值与实际观测值之间的差异,评估参数估计的好坏。
最小二乘法估计分解是一种非常常用的参数估计方法,广泛应用于各个领域,包括统计学、经济学、物理学、工程学等。
它的优点是计算简单,对异常值的影响较小。
然而,最小二乘法也有一些局限性,例如对于非线性模型,其参数估计可能无法得到最优解。
在实际应用中,最小二乘法估计分解可以结合其他方法一起使用,例如正则化方法、加权最小二乘法等,以提高参数估计的准确性和稳定性。
基于最小二乘法的参数估计方法研究最小二乘法是一种常用的参数估计方法,广泛应用于统计学和经济学等领域。
本文将从最小二乘法的原理、应用以及相关研究等方面展开讨论。
首先,最小二乘法的原理是通过最小化残差平方和来估计参数值。
在建立模型时,我们通常假设真实值与预测值之间存在一定程度的误差,即残差。
最小二乘法的目标是找到一组参数值,使得预测值与真实值之间的残差平方和最小。
这样做的原因是残差平方和作为代价函数,对不同参数值的调整敏感,可以有效地提高模型的拟合度。
最小二乘法广泛应用于回归分析中。
回归分析旨在研究自变量与因变量之间的关系,并使用最小二乘法估计自变量对因变量的影响。
通过最小二乘法,可以得到最优的回归系数,从而更好地解释变量间的关联关系。
最小二乘法还可用于时间序列分析、方差分析等统计学方法中。
在实际应用中,最小二乘法还经常用于求解线性方程组。
给定m个方程和n个未知数的线性方程组,最小二乘法可以用来求解未知数的最优估计值。
最小二乘法通过求解方程组的最小二乘解,使得方程组的解能够最优地拟合真实的观测数据。
除了最小二乘法的基本原理和应用外,还存在一些相关研究。
例如,随着计算机技术和算法优化的发展,最小二乘法的计算效率和精度得到了很大提高。
研究者们提出了各种基于最小二乘法的改进算法,如加权最小二乘法、广义最小二乘法等。
这些算法在不同的问题领域中得到了广泛的应用。
此外,最小二乘法还存在一些局限性。
首先,最小二乘法对异常值非常敏感,可能导致估计结果的不准确性。
因此,在实际应用中,我们需要对异常值进行特殊处理,以防止其对参数估计结果的影响。
其次,最小二乘法要求模型满足线性假设和误差项的独立同分布等假设条件。
如果模型不满足这些假设条件,最小二乘法可能会产生较大的偏差或无效的结果。
综上所述,最小二乘法是一种常用的参数估计方法。
它通过最小化残差平方和来估计参数值,并且广泛应用于统计学和经济学等领域。
最小二乘法的原理清晰简单,但在实际应用中需要注意异常值和假设条件等因素的影响。
【2-1】 设某物理量Y 与X1、X2、X3的关系如下:Y=θ1X 1+θ2X 2+θ3X 3 由试验获得的数据如下表。
试用最小二乘法确定模型参数θ1、θ2和θ3 X1: 0.62 0.4 0.42 0.82 0.66 0.72 0.38 0.52 0.45 0.69 0.55 0.36 X2: 12.0 14.2 14.6 12.1 10.8 8.20 13.0 10.5 8.80 17.0 14.2 12.8 X3: 5.20 6.10 0.32 8.30 5.10 7.90 4.20 8.00 3.90 5.50 3.80 6.20 Y: 51.6 49.9 48.5 50.6 49.7 48.8 42.6 45.9 37.8 64.8 53.4 45.3解:MATLAB 程序为:Clear all;A= [0.6200 12.000 5.20000.4000 14.2000 6.10000.4200 14.6000 0.32000.8200 12.1000 8.30000.6600 10.8000 5.10000.7200 8.2000 7.90000.3800 13.0000 4.20000.5200 10.5000 8.00000.4500 8.8000 3.90000.6900 17.0000 5.50000.5500 14.2000 3.80000.3600 12.8000 6.2000];B=[51.6 49.9 48.5 50.6 49.7 48.8 42.6 45.9 37.8 64.8 53.4 45.3]';C=inv(A'*A)*A'*B=[0.62 12 5.2;0.4 14.2 6.1;0.42 14.6 0.32;0.82 12.1 8.3;0.66 10.8 5.1;0.72 8.2 7.9;0.38 13 4.2;0.52 10.5 8;0.45 8.8 3.9;0.69 17 5.5;0.55 14.2 3.8;0.36 12.8 6.2]公式中的A 是ΦN, B 是YN ,运行M 文件可得结果:在matlab 中的运行结果:C=29.59032.44660.4597【2-3】 考虑如下模型)()(3.03.115.0)(2121t w t u z z z z t y ++-+=---- 其中w(t)为零均值、方差为1的白噪声。
根据模型生成的输入/输出数据u(k)和y(k),分别采用批处理最小二乘法、具有遗忘因子的最小二乘法(λ=0.95)和递推最小二乘法估计模型参数(限定数据长度N 为某一数值,如N=150或其它数值),并将结果加以比较。
解:1、批处理最小二乘法M文件如下:clear all;close all;a=[1 -1.3 0.3]';b=[1 0.5]';d=1;%对象参数na=length(a)-1;nb=length(b)-1;%na,nb为A,B阶次N=200;%观测数据组uk=zeros(d+nb,1);%创建d+nb行1列的零列向量,给输入赋初值0yk=zeros(na,1);%输出初值x1=1;x2=1;x3=1;x4=0;%移位寄存器初值S=1;%方波初值W=randn(N,1);%产生均值为零方差为1的白噪声序列w(k)theta=[a(2:na+1);b];%theta为列向量,[-1.3 0.3 1 0.5]',为对象参数真值for k=1:Nphi(k,:)=[-yk;uk(d:d+nb)]';%phi为行向量,组成phi矩阵y(k)=phi(k,:)*theta+W(k);%采集输出数据IM=xor(S,x4);%进行异或运算,产生逆M序列if IM==0u(k)=-1;elseu(k)=1;endS=not(S);%产生方波M=xor(x3,x4);%进行异或运算,产生M序列x4=x3;x3=x2;x2=x1;x1=M;%寄存器移位for i=d+nb:-1:2uk(i)=uk(i-1);enduk(1)=u(k);for i=na:-1:2yk(i)=yk(i-1);endyk(1)=y(k);endthetae=inv(phi'*phi)*phi'*y'%计算参数估计值thetaeJ=y*y'-2*(phi'*y')'*thetae+thetae'*phi'*phi*thetae%求最小估计误差平方和clear all;close all;a=[1 -1.3 0.3]';b=[1 0.5]';d=1;%对象参数na=length(a)-1;nb=length(b)-1;%na,nb为A,B阶次N=200;%观测数据组uk=zeros(d+nb,1);%创建d+nb行1列的零列向量,给输入赋初值0yk=zeros(na,1);%输出初值x1=1;x2=1;x3=1;x4=0;%移位寄存器初值S=1;%方波初值W=randn(N,1);%产生均值为零方差为1的白噪声序列w(k)theta=[a(2:na+1);b];%theta为列向量,[-1.3 0.3 1 0.5]',为对象参数真值for k=1:Nphi(k,:)=[-yk;uk(d:d+nb)]';%phi为行向量,组成phi矩阵y(k)=phi(k,:)*theta+W(k);%采集输出数据IM=xor(S,x4);%进行异或运算,产生逆M序列if IM==0u(k)=-1;elseu(k)=1;endS=not(S);%产生方波M=xor(x3,x4);%进行异或运算,产生M序列x4=x3;x3=x2;x2=x1;x1=M;%寄存器移位for i=d+nb:-1:2uk(i)=uk(i-1);enduk(1)=u(k);for i=na:-1:2yk(i)=yk(i-1);endyk(1)=y(k);endthetae=inv(phi'*phi)*phi'*y'%计算参数估计值thetaeJ=y*y'-2*(phi'*y')'*thetae+thetae'*phi'*phi*thetae%求最小估计误差平方和运行结果如下:thetae =-1.30220.29820.97090.5091J =186.0817与真值比较参数a1 a2 b0 b1真值-1.3 0.3 1 0.5估计-1.3022 0.2982 0.9709 0.50912、递推最小二乘法clear all;close all;a=[1 -1.3 0.3]';b=[1 0.5]';d=1;%对象参数na=length(a)-1;nb=length(b)-1;%na,nb为A,B阶次N=200;%观测数据组uk=zeros(d+nb,1);%创建d+nb行1列的零列向量,给输入赋初值0yk=zeros(na,1);%输出初值u=randn(N,1);%输入采用白噪声序列w=randn(N,1);%产生均值为零方差为1的白噪声序列w(k)theta=[a(2:na+1);b];%theta为列向量,[-1.3 0.3 1 0.5]',为对象参数真值thetae_1=zeros(na+nb+1,1);%thetae的chuzhiP=10^6*eye(na+nb+1);%P初值for k=1:Nphi=[-yk;uk(d:d+nb)];%phi为行向量,组成phi矩阵y(k)=phi'*theta+w(k);%采集输出数据K=P*phi/(1+phi'*P*phi);thetae(:,k)=thetae_1+K*(y(k)-phi'*thetae_1);P=(eye(na+nb+1)-K*phi')*P;thetae_1=thetae(:,k);for i=d+nb:-1:2uk(i)=uk(i-1);enduk(1)=u(k);for i=na:-1:2yk(i)=yk(i-1);endyk(1)=y(k);end%画参数随采样时刻的估计结果plot([1:N],thetae);xlabel('k');ylabel('参数估计a,b');legend('a1','a2','b0','b1');axis([0 N -2 2]);运行结果:图1 递推最小二乘法参数估计图中可以看出,辨识过程很不稳定,参数波动较大,因为在试验中将输入和噪声幅值一样大,噪声干扰相对输入较大,所以应该调整输入和噪声的幅值分别另:u=25*randn(N,1),50*randn(N,1),100*randn(N,1)所得结果如下图1)u=25*randn(N,1)2)u=50*randn(N,1)3)u=100*randn(N,1)综上可以看出只有当输入幅值较大时系统辨识的效果会更好,参数波动也不是很大。
3、遗忘因子最小二乘法clear all;close all;a=[1 -1.3 0.3]';b=[1 0.5]';d=1;%对象参数na=length(a)-1;nb=length(b)-1;%na,nb为A,B阶次N=200;%观测数据组uk=zeros(d+nb,1);%创建d+nb行1列的零列向量,给输入赋初值0yk=zeros(na,1);%输出初值u=1*randn(N,1);%输入采用白噪声序列xi=randn(N,1);%产生均值为零方差为1的白噪声序列w(k)thetae_1=zeros(na+nb+1,1);%thetae的chuzhiP=10^6*eye(na+nb+1);%P初值lambda=0.95%遗忘因子for k=1:Ntheta(:,k)=[a(2:na+1);b];%对象参数真值phi=[-yk;uk(d:d+nb)];%phi为行向量,组成phi矩阵y(k)=phi'*theta(:,k)+xi(k);%采集输出数据K=P*phi/(lambda+phi'*P*phi);thetae(:,k)=thetae_1+K*(y(k)-phi'*thetae_1);P=(eye(na+nb+1)-K*phi')*P/lambda;thetae_1=thetae(:,k);for i=d+nb:-1:2uk(i)=uk(i-1);enduk(1)=u(k);for i=na:-1:2yk(i)=yk(i-1);endyk(1)=y(k);end%画参数随采样时刻的估计结果subplot(1,2,1);plot([1:N],thetae(1:na,:));hold on;plot([1:N],theta(1:na,:),'k:');xlabel('k');ylabel('参数估计a');legend('a1','a2');axis([0 N -2 2]);subplot(1,2,2)plot([1:N],thetae(na+1:na+nb+1,:));hold on;plot([1:N],theta(na+1:na+nb+1,:),'k:'); xlabel('k');ylabel('参数估计b');legend('b0','b1');axis([0 N -0.5 2]);运行结果:改变输入信号的幅值,使u=12.5*randn(N,1),25*randn(N,1),50*randn(N,1),100*randn(N,1) 1)u=12.5*randn(N,1)2)u=25*randn(N,1)3)u=50*randn(N,1)4)4)u=100*randn(N,1)比较可知:只有当输入幅度较大时系统辨识结果更好【3-2】 设有被控过程:)()2.11()()6.07.11(1221k u z z k y z z ----+=+-给定期望传递函数的分母多项式为)08.06.01()(211---+-=z z z A m ,试按照极点配置方法设计控制系统,使期望输出无稳态误差,并写出控制表达式u(k)。