MATLAB优化设计实验
- 格式:pptx
- 大小:455.42 KB
- 文档页数:30
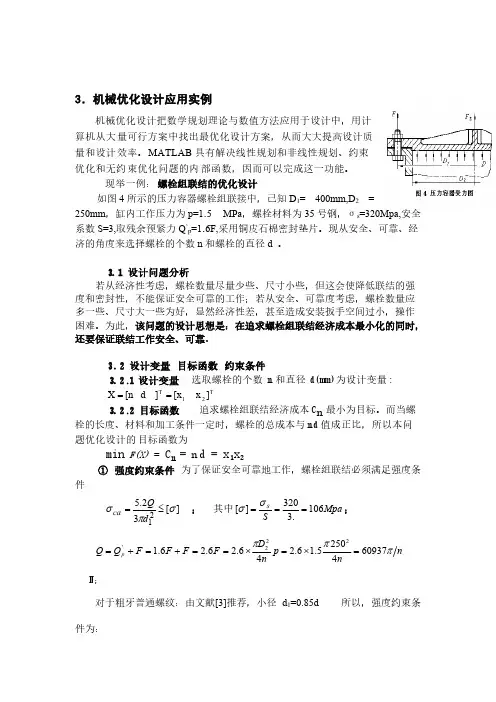
化设计hl4HU©0⑥ 3 hlu 凹内r d X1州fci-rU-fFF卢F ♦ 忡下¥为+1 —*— S-ll-« F41:Si —MATLABoftiHMirjirCfiffliiiiJ PHI■1**■ 温不平?」11,・—喜M - 〜FT 文词一时y 片 34ml 3F*L9TR0i. Jill!-LkftLgWf 1S1CSI掰f 1 ■ >A A A »W I % :k Dnfl w I ■ J k^lXMprfaMk tjn nn Alflhw初选 x0=[1,1] 程序:Step 1: Write an Mfle objfunl.m.function f1=objfun1(x)f1=x(1)人2+2*x(2)入2-2*x(1)*x(2)-4*x(1);Step 2: Invoke one of the unconstrained optimization routinesx0=[1,1];>> options = 0Ptimset('LargeScale','off);>> [x,fval,exitflag,output] = fminunc(@objfun1,x0,options)运行结果: x =4.0000 2.0000 fval = -8.0000exitflag =1 output = iterations: 3 funcCount: 12 stepsize: 1 firstorderopt: 2.3842e-007algorithm: 'medium-scale: Quasi-Newton line search message: [1x85 char]非线性有约束优化1. Min f(x)=3 x : + x 2+2 x 1-3 x 2+5 Subject to:g 2(x)=5 X 1-3 X 2 -25 < 0 g (x)=13 X -41 X 2 < 0 3 12g 4(x)=14 < X 1 < 130无约束优化 min f(x)=X 2 + x 2-2 x 1 x 2-4 x 1g5 (x)=2 < X 2 < 57初选x0=[10,10]Step 1: Write an M-file objfun2.mfunction f2=objfun2(x)f2=3*x(1)人2+x(2)人2+2*x(1)-3*x(2)+5;Step 2: Write an M-file confunl.m for the constraints. function [c,ceq]=confun1(x) % Nonlinear inequality constraints c=[x(1)+x(2)+18;5*x(1)-3*x(2)-25;13*x(1)-41*x(2)人2;14-x(1);x(1)-130;2-x(2);x(2)-57];% Nonlinear inequality constraints ceq=[];Step 3: Invoke constrained optimization routinex0=[10,10]; % Make a starting guess at the solution>> options = optimset('LargeScale','off);>> [x, fval]=...fmincon(@objfun2,x0,[],[],[],[],[],[],@confun1,options)运行结果:x =3.6755 -7.0744 fval =124.14952.min f (x) =4x2 + 5x2s.t. g 1(x) = 2X] + 3x2- 6 < 0g (x) = x x +1 > 0初选x0=[1,1]Step 1: Write an M-file objfun3.m function f=objfun3(x) f=4*x(1)人2 + 5*x(2)人2Step 2: Write an M-file confun3.m for the constraints. function [c,ceq]=confun3(x) %Nonlinear inequality constraints c=[2*x(1)+3*x(2)-6;-x(1)*x(2)-1];% Nonlinear equality constraints ceq口;Step 3: Invoke constrained optimization routinex0=[1,1];% Make a starting guess at the solution>> options = optimset('LargeScale','off);>> [x, fval]=...fmincon(@objfun,x0,[],[],[],[],[],[],@confun,options)运行结果:Optimization terminated: no feasible solution found. Magnitude of search direction less than2*options.TolX but constraints are not satisfied.x =11fval =-13实例:螺栓连接的优化设计图示为一压气机气缸与缸盖连接的示意图。

实验六遗传算法与优化设计一、实验目的1. 了解遗传算法的基本原理和基本操作(选择、交叉、变异);2. 学习使用Matlab中的遗传算法工具箱(gatool)来解决优化设计问题;二、实验原理及遗传算法工具箱介绍1. 一个优化设计例子图1所示是用于传输微波信号的微带线(电极)的横截面结构示意图,上下两根黑条分别代表上电极和下电极,一般下电极接地,上电极接输入信号,电极之间是介质(如空气,陶瓷等)。
微带电极的结构参数如图所示,W、t分别是上电极的宽度和厚度,D是上下电极间距。
当微波信号在微带线中传输时,由于趋肤效应,微带线中的电流集中在电极的表面,会产生较大的欧姆损耗。
根据微带传输线理论,高频工作状态下(假定信号频率1GHz),电极的欧姆损耗可以写成(简单起见,不考虑电极厚度造成电极宽度的增加):图1 微带线横截面结构以及场分布示意图(1)其中为金属的表面电阻率,为电阻率。
可见电极的结构参数影响着电极损耗,通过合理设计这些参数可以使电极的欧姆损耗做到最小,这就是所谓的最优化问题或者称为规划设计问题。
此处设计变量有3个:W、D、t,它们组成决策向量[W, D ,t] T,待优化函数称为目标函数。
上述优化设计问题可以抽象为数学描述:(2)其中是决策向量,x1,…,xn为n个设计变量。
这是一个单目标的数学规划问题:在一组针对决策变量的约束条件下,使目标函数最小化(有时也可能是最大化,此时在目标函数前添个负号即可)。
满足约束条件的解X称为可行解,所有满足条件的X组成问题的可行解空间。
2. 遗传算法基本原理和基本操作遗传算法(Genetic Algorithm, GA)是一种非常实用、高效、鲁棒性强的优化技术,广泛应用于工程技术的各个领域(如函数优化、机器学习、图像处理、生产调度等)。
遗传算法是模拟生物在自然环境中的遗传和进化过程而形成的一种自适应全局优化算法。
按照达尔文的进化论,生物在进化过程中“物竞天择”,对自然环境适应度高的物种被保留下来,适应度差的物种而被淘汰。

长江大学机械工程学院机械优化设计大作业班级2012年5月31-361、⎩⎨⎧=+-=++⋅+-++=22422min 321321321232221x x x x x x t s x x x x x x f解: function f=fun1(x)f=x(1)^2+2*x(2)^2+x(3)^2-2*x(1)*x(2)+x(3)clearclcx0=[1;1;1];A=[];b=[];Aeq=[1 1 1;2 -1 1];beq=[4;2];lb=[];ub=[];[x,fval,exitflag]=fmincon('fun1',x0,A,b,Aeq,beq,lb,ub)x =1.90911.95450.1364fval =3.9773exitflag =12、221212min ()2130f x x x x s t x =+-+⋅-≤解: function f=fun2(x)f=x(1)^2+x(2)^2-2*x(1)+1clearclcx0=[1;1];A=[0 -1];b=-3;Aeq=[];beq=[];lb=[];ub=[];[x,fval,exitflag]=fmincon('fun2',x0,A,b,Aeq,beq,lb,ub)x =13fval =9exitflag =13、 2212min ()(2)f X x x =-+112222312..()0()0()10s t g X x g X x g X x x =-≤=-≤=-+-≤解:function f=fun3(x)f=(x(1)-2)^2+x(2)^2function [g,ceq]=mycon3(x)g=[-x(1);-x(2);-x(1)^2+x(2)^2-1];ceq=[];clearclcx0=[0;0];A=[];b=[];Aeq=[];beq=[];lb=[];ub=[];[x,fval]=fmincon('fun3',x0,A,b,Aeq,beq,lb,ub,'mycon3')x =2.0000fval =2.2204e-0164、⎩⎨⎧≤--≤+--⋅++++=01005.1)12424(min 21212122122211x x x x x x t s x x x x x e f x解: function f=fun4(x)f=exp(x(1))*(4*x(1)^2+2*x(2)^2+4*x(1)*x(2)+2*x(2)+1);function [g,ceq]=mycon4(x)g(1)=1.5+x(1)*x(2)-x(1)-x(2);g(2)=-x(1)*x(2)-10;ceq=[];clearclcx0=[0;0];A=[];b=[];Aeq=[];beq=[];lb=[];ub=[];[x,fval]=fmincon('fun4',x0,A,b,Aeq,beq,lb,ub,'mycon4')x =1.1825-1.7398fval =3.06085 喜糖问题:需要购买甲乙两种喜糖,喜糖甲10元/斤,喜糖乙20元/斤。
基于MATLAB的多级齿轮传动多目标可靠性优化设计研究I. 内容概述随着工业自动化的发展,多级齿轮传动系统在各个领域得到了广泛的应用。
然而由于其复杂的结构和工作条件,齿轮传动系统的可靠性一直是设计者关注的重点。
为了提高齿轮传动系统的可靠性,本文提出了一种基于MATLAB的多级齿轮传动多目标可靠性优化设计方法。
首先本文对多级齿轮传动系统的工作原理进行了详细的阐述,包括齿轮啮合、齿面接触、磨损和疲劳等方面的问题。
在此基础上,分析了齿轮传动系统的可靠性评价指标体系,包括寿命、失效率、维修性等关键性能指标。
其次针对多级齿轮传动系统的可靠性优化设计问题,本文提出了一种基于遗传算法和粒子群优化算法的多目标优化设计方法。
通过对比分析不同优化算法的优缺点,最终确定了基于MATLAB的遗传算法作为本研究的主要优化方法。
本文以某型号齿轮传动系统为例,运用所提方法对其进行了多目标可靠性优化设计。
实验结果表明,所提方法能够有效地提高齿轮传动系统的可靠性指标,为实际工程应用提供了有力的理论支持。
A. 研究背景和意义随着科学技术的不断发展,齿轮传动技术在各个领域的应用越来越广泛。
齿轮传动具有传动效率高、承载能力大、传动精度高等优点,因此在工业生产中得到了广泛的应用。
然而齿轮传动系统的可靠性一直是制约其性能的重要因素,为了提高齿轮传动系统的可靠性,降低故障率,保证设备的正常运行,需要对齿轮传动系统进行多目标可靠性优化设计。
目前基于数值计算的可靠性优化设计方法已经成为齿轮传动系统研究的主要手段。
MATLAB作为一种广泛应用于工程领域的数值计算软件,具有强大的数学运算能力和图形化编程功能,为齿轮传动系统的可靠性优化设计提供了有力的支持。
因此基于MATLAB的多级齿轮传动多目标可靠性优化设计研究具有重要的理论和实际意义。
首先研究基于MATLAB的多级齿轮传动多目标可靠性优化设计方法有助于提高齿轮传动系统的可靠性。
通过合理的参数设置和优化策略选择,可以有效地提高齿轮传动系统的可靠性指标,降低故障率,延长设备使用寿命。
基于Matlab的六足机器人优化设计仿真王伟伟;陈锋【摘要】The hexapod robots are highly integrated electromechanical bionic systems, whose dynamic performance is determined by the structure system and the control system. In order to improve the overall dynamic performance of the hexapod robots, the integration of optimized design of the hexapod robot is needed. Design variables, constraints and objective functions involved in the optimization process are discussed based on the geometric characteristics; the integrated optimization model of hexapod robot systems is built. With examples, comparative analysis of simulation results is done. Simulation results illustrate that integrated design can get better dynamic performance for the hexapod robot system.%六足机器人是机电高度集成的仿生系统,它的动态性能由其结构系统与控制系统一起决定。
为了提高六足机器人整体的动态性能,对六足机器人进行集成优化设计。
描述六足机器人系统的结构;根据六足机器人机构的几何特征,讨论在优化过程中涉及到的设计变量、约束方程以及目标函数;对六足机器人系统进行集成优化建模。
matlab;高性能混凝土;配合比优化设计;序列二次规划高性能混凝土主要是指混凝土的抗压强度高,弹性模量大,抗裂能力强,耐久性好的混凝土,既可以满足结构的抗荷载要求,又具有较低的厚度设计,减少自重和降低施工成本,有助于降低建设成本,满足经济性和结构性能要求。
因此,研制出高性能混凝土,并优化其配合比,考虑混凝土的性能,对混凝土结构设计具有重要意义。
Matlab是一款具有强大功能和潜力的软件,使用它可以有效解决科学计算和工程设计问题,能够实现大量的数据处理和信息管理,其功能强大,可以帮助工程师更好地完成各种设计任务。
因此,应用Matlab技术进行对高性能混凝土配合比优化设计和序列二次规划,可以更大程度地发挥其优势,在高性能混凝土配合比设计中发挥作用。
首先,高性能混凝土应给出混凝土配合比的设计原则,明确减小气孔率、增加抗压强度和降低相对湿度的设计目标,同时重视用料的经济性,并考虑内部胶结形式的稳定性,满足上述目标可以有效减少配合比设计的不确定性。
其次,应利用Matlab建立混凝土配合比优化模型,以优化混凝土配合比以实现抗压强度和其他力学性能的最优化。
该模型应设计为面向对象数据结构,采用序列二次规划法,以期达到优化目标。
第三,应评估Matlab技术优化设计及序列二次规划模型的信噪比,确保优化设计混凝土配合比的准确性和可靠性。
最后,应在高性能混凝土实验室中进行抗压强度、等压强度、抗折强度、抗剪强度、抗冻结强度及抗腐蚀性能的实验检测,以验证其设计性能的准确性和可靠性。
综上所述,Matlab技术可用于高性能混凝土配合比优化设计序列二次规划,以求得更优混凝土配合比,有效提升混凝土结构的性能。
在进行优化设计时,应注意混凝土配合比的设计原则和混凝土性能的评估,同时进行实验检测,以确保优化设计的可靠性和准确性。
使用Matlab进行电力系统分析和优化设计概述电力系统是现代社会运行的关键基础设施,对于电网的设计和运行进行分析和优化是保障电力供应的重要任务。
Matlab作为一种功能强大的工具和编程语言,被广泛应用于电力系统领域,能够提供一系列用于电力系统分析和优化设计的工具和函数。
1. 电力系统建模电力系统建模是进行电力系统分析和优化设计的基础。
在Matlab中,可以使用不同的方式进行电力系统建模,如节点模型、分支模型和网络模型。
节点模型是通过对电力系统网络进行节点和支路的描述,表示电力系统的拓扑和参数关系。
分支模型则是将电力系统分解为若干个支路,通过对每个分支进行建模计算。
网络模型则是将电力系统建模为一个整体,通过求解一组方程组来获得电力系统的节点电压和支路功率。
2. 电力系统分析电力系统分析是对电力系统运行状态和安全性进行评估和分析的过程。
在Matlab中,可以使用各种分析方法进行电力系统分析,例如潮流分析、短路分析、稳定性分析和谐波分析等。
潮流分析是用于求解电力系统的节点电压和支路功率分布的一种方法。
通过潮流分析,可以确定电力系统的潮流分布情况,找出潮流过载和电压偏差等问题,并提供相应的优化建议。
短路分析是用于评估电力系统在短路故障时的电流分布和保护措施的一种方法。
短路分析可以帮助确定电力系统的短路电流和设备额定电流的比较情况,从而评估电力系统的安全性和保护设备的合理性。
稳定性分析是用于评估电力系统在故障和变动负荷等情况下的稳定性和可靠性的一种方法。
通过稳定性分析,可以确定电力系统的动态响应和稳定裕度,提供相应的优化设计和控制建议。
谐波分析是用于评估电力系统中谐波电压和谐波电流的一种方法。
通过谐波分析,可以确定电力系统中谐波电压和谐波电流的谐波含量,找出谐波问题的根源,并提供相应的滤波器和接地措施。
3. 电力系统优化设计电力系统优化设计是在满足电力供应要求的前提下,通过合理配置和控制电力系统的各个元件,以提高系统的效率和可靠性。
机械优化设计MATLAB程序机械优化设计MATLAB程序引言机械优化设计是现代工程领域中的重要课题,通过采用数值方法和优化算法,可以实现对机械产品设计的自动化和优化。
MATLAB 作为一种功能强大的科学计算软件,为机械优化设计提供了丰富的工具和函数。
本文将介绍如何使用MATLAB编写机械优化设计程序,并讨论如何应用MATLAB进行机械优化设计。
MATLAB的优势与其他科学计算软件相比,MATLAB具有许多优势:1. 丰富的工具箱:MATLAB包含了各种各样的工具箱,涵盖了数值计算、优化、曲线拟合、数据可视化等领域,这些工具箱为机械优化设计提供了强大的支持。
2. 简单易用的编程语言:MATLAB使用的编程语言是一种高级语言,语法简单易懂,对于初学者而言非常友好。
即使没有编程经验,用户也能够快速上手。
3. 丰富的函数库:MATLAB拥有丰富的函数库,用户可以直接调用这些函数来完成各种任务,无需从零开始编写代码。
4. 广泛的应用领域:MATLAB在工程、科学、金融等领域得到了广泛的应用,拥有一个庞大的用户社区。
用户可以通过查看官方文档、参与用户社区等途径获取帮助和支持。
机械优化设计的步骤机械优化设计一般包括以下几个步骤:1. 建立数学模型:首先需要建立机械系统的数学模型,该模型可以基于物理原理或实验数据。
通过建立数学模型,可以将机械系统的性能指标与设计变量进行数学描述。
2. 确定优化目标:根据机械系统的需求和限制条件,确定优化目标。
优化目标可以是多个,如最小化能量损失、最小化材料使用量等。
3. 选择优化算法:基于问题的性质选择合适的优化算法。
常用的优化算法包括遗传算法、粒子群算法、梯度下降算法等。
4. 编写MATLAB代码:根据以上步骤,编写MATLAB代码实现机械优化设计。
MATLAB提供了丰富的工具箱和函数来辅助编写优化算法的代码。
编写机械优化设计MATLAB程序的步骤以下是编写机械优化设计MATLAB程序的一般步骤:1. 导入必要的工具箱和函数库:```% 导入优化工具箱import optim.% 导入其他必要的函数库import matlab.```2. 建立数学模型:根据机械系统的特点和要求,建立相应的数学模型。
基于MATLAB的齿轮还原设计优化是一项具有挑战性的任务,需要深入了解齿轮动力学和有效利用MATLAB的能力。
该项目的目标是优化齿轮减速系统的设计,以在最小的能量损失下实现最佳性能。
优化过程的第一步是使用MATLAB来模拟齿轮还原系统。
这涉及到创建一个数学模型,准确代表系统的动态。
模型必须考虑到每个齿轮上的牙齿数量,齿轮比,应用于系统的扭矩,以及其他重要的参数。
一旦模型被创建,就可以用来模拟不同条件下的减速齿轮系统的性能。
为了优化齿轮减速系统的设计,可以使用MATLAB的优化工具箱。
这个工具箱提供了一系列优化算法,可以用来寻找系统参数的最佳值。
这些算法可用于尽量减少能量损失,最大限度地提高效率,或者实现任何其他性能目标。
通过运行不同起始值和约束的优化算法,可以找到减速齿轮系统的最佳设计。
除了使用MATLAB的优化工具箱外,还必须考虑减速齿轮系统的局限性和局限性。
齿轮的尺寸和重量,可用的扭矩,以及理想的齿轮比都是在优化过程中必须考虑的重要制约因素。
通过将这些限制纳入优化算法,可以实现符合所有要求的设计。
一旦找到符合性能和约束要求的设计,就必须使用MATLAB验证设计。
这涉及对优化参数进行模拟,以确保减速齿轮系统如期运行。
如果模拟显示系统没有达到预期的性能目标,可能需要进一步优化或调整设计。
利用MATLAB设计和优化减速系统是一项复杂但有益的任务。
通过使用MATLAB的模型和优化能力,有可能找到一个能满足所有性能和约束要求的减速齿轮系统的最佳设计。
这有助于为各种应用建立高效和可靠的减速齿轮系统。
基于matlab的圆柱螺旋弹簧的优化设计一、简介圆柱螺旋弹簧是一种由弹簧螺旋结构和圆柱螺纹组成的环形结构组件,常被用于爆炸发动机、汽车、摩托车和柴油机等机械设备中,以产生力矩并调整负载。
为了提高圆柱螺旋弹簧的性能,最终设计不仅必须能够满足要求,而且应该是最优化的。
此外,它还具有良好的结构强度、可靠性和耐久性。
为了实现这一目标,必须进行有效的优化设计。
Matlab作为一种计算机建模和仿真软件,具有良好的可视化效果和建模能力,能高效地处理复杂优化问题。
弹簧设计的一般原理:首先,采用0.05mm的螺纹作为圆柱螺纹;其次,计算弹簧周期的变形量和频率,并采用有限元方法分析弹簧本身的变形量;最后,使用Matlab优化设计以确定最佳参数组合。
二、实现步骤1、弹性分析:对于优化设计,原始设计圆柱螺旋弹簧参数是基于有限元法(FEM)进行弹性计算和优化定义的。
首先,采用有限元法(FEM)分析弹簧的弹性变形,通过测定具有相同参数的多个圆柱螺旋弹簧的工作频率和变形量,来确定弹簧的最终性能参数,并将变形量反馈到设计参数。
2、优化参数设计:根据记录的起始参数和有关仿真结果确定工作频率,变形量以及圆柱螺旋弹簧的尺寸信息。
该尺寸具有多种可能的参数选项,例如节距、轴向压缩距离、环数目、外径、内径等。
采用Matlab的优化设计功能,能够有效操作优化算法,以实现最优的尺寸参数。
三、优化设计结果应用采用Matlab优化设计的结果可以用于重新设计圆柱螺旋弹簧的尺寸参数,确保其最优性能,并提高可靠性和耐久性。
同时,该优化设计结果也可作为更多结构件的设计参考,从而改善整个机械系统的效果。
除此之外,此优化设计也能更有效地减少材料成本和工作量,从而降低制造成本,提高经济效益。
最后,此优化设计结果可以作为参考,帮助其他有关设计工作不无益处。
机械优化设计MATLAB程序正文:⒈前言⑴研究背景机械优化设计是一种在机械工程领域中被广泛应用的方法,旨在通过使用数学模型和优化算法来改进机械系统的性能。
MATLAB是一种强大的数值计算和编程工具,可以用于开发机械优化设计程序。
⑵目的和范围⒉问题描述⑴设计需求在开始编写机械优化设计程序之前,需要明确设计需求,即需要实现的机械系统的性能指标或目标。
这些需求可以包括系统的功率、效率、噪声、振动等方面。
⑵优化目标根据设计需求,确定最终优化目标。
例如,通过调整机械系统的参数来最大化系统的效率、最小化系统的振动等。
⒊数学模型⑴设计变量设计变量是机械系统中可以调整的参数。
需要对设计变量进行定义和范围设定,以确保优化算法能够在合理的范围内搜索最优解。
⑵约束条件约束条件是在进行优化时必须满足的条件。
这些条件可以包括设计变量的边界条件、约束函数等。
在编写MATLAB程序时,需要将这些约束条件作为输入参数。
⒋算法选择与实现⑴优化算法选择根据优化目标和系统的特点,选择合适的优化算法。
常见的优化算法包括遗传算法、粒子群优化算法、模拟退火算法等。
⑵优化算法实现根据选择的优化算法,编写MATLAB程序实现优化过程。
程序应包括目标函数的定义、算法的参数设置、迭代过程和终止条件等。
⒌算法验证与结果分析⑴数据采集与处理在进行机械优化设计实验时,需要采集相应的实验数据,并对数据进行处理。
这些数据可以包括设计变量的调整情况、系统性能指标的变化等。
⑵结果分析基于采集到的数据,分析和比较不同优化算法的性能。
可以绘制图表展示优化过程和结果的变化,以便于进一步分析和优化。
⒍结论与展望总结机械优化设计MATLAB程序的设计过程和结果,对实验结果进行分析,并提出未来改进和研究的方向。
1、本文档涉及附件:附件1:MATLAB程序代码示例附件2:数据采集记录表2、本文所涉及的法律名词及注释:机械优化设计:指利用数学模型和优化算法改善机械系统性能的方法。
基于MATLAB的金融衍生品定价模型优化设计在金融市场中,衍生品定价一直是一个重要的问题。
衍生品作为一种金融工具,不同于股票、债券等传统的金融产品,其“衍生”于其他金融资产,通常被用于风险管理、投资或套利等方面。
而衍生品所基于的标的资产价格波动,是衍生品定价过程中最重要的因素之一。
MATLAB作为一款专业的数学计算工具,在金融衍生品定价模型中也发挥了重要作用。
然而,现有的金融衍生品定价模型还存在一些问题,比如不可充分利用数据、参数需要手动校准等,这些问题实际上增加了金融机构和从业人员的困难和成本。
因此,如何优化基于MATLAB的金融衍生品定价模型设计,成为一个值得研究的课题。
首先,对于基于MATLAB的金融衍生品定价模型的优化设计,需要从以下三个方面来考虑。
一、数据的充分利用随着数据处理技术的不断发展,如何使用更多、更有效的数据来改进金融衍生品定价模型设计,是当前研究的热点方向之一。
对于基于MATLAB的金融衍生品定价模型,数据处理工具包如Datafeed、Database Toolbox以及Financial Toolbox等都能够给予一定的帮助。
这些工具包可以与外部数据源、互联网或API进行连接,以更好地获取和处理数据,从而提高模型的精确度和性能。
二、参数的自动校准参数的设定在金融衍生品定价模型中是一个关键问题。
传统的参数的设定通常需要人工手动校准,这种方法不仅费时费力,而且不利于准确性的把握。
为此,设计一个能够自动校准模型参数的方法,就显得尤为必要。
MATLAB中的Optimization Toolbox可以提供自动优化的方法,通过迭代计算出最优的模型参数,进而提高模型的精确性。
三、模型的实时性实时性是金融行业中一个非常重要的概念,这也对于基于MATLAB的金融衍生品定价模型提出了更高的要求。
金融行业中很多信息都是瞬息万变的,因此,无论是数据处理还是模型计算,都需要在最短的时间内完成。
MATLAB底层的Matrix Computation技术就能够很好地解决这个问题,Matrix Computation可以有效地并行处理数值计算,从而提高模型的计算速度和实时性。
优化设计Matlab实例解析MATLAB是一种基于矩阵运算的高级编程语言和环境,被广泛应用于各个领域的科学计算和工程问题。
在实际应用中,我们经常面临优化设计的任务,即在给定的限制条件下,寻找最优的解决方案。
优化设计可以应用于诸如控制系统设计、信号处理、图像处理、机器学习等问题中。
下面我们以一个简单的例子来说明如何使用MATLAB进行优化设计。
假设我们有一个矩形花园,每边有一定的长度,我们希望找到一个长和宽使得花园的面积最大化。
令矩形花园的长和宽分别为x和y,由于边长有限制条件,即x的范围为0到20,y的范围为0到10,同时花园的长度之和不得超过30。
我们的目标是找到一组合适的x和y,使得面积A 最大。
在MATLAB中,我们可以使用优化工具箱中的函数fmincon来求解这个问题。
以下是具体的实现步骤:1.创建目标函数首先,我们需要定义一个目标函数来评估每组x和y的解决方案。
在这个例子中,我们的目标是最大化矩形花园的面积,因此我们的目标函数可以简单地定义为A=x*y。
```matlabfunction A = objective(x)A=-x(1)*x(2);%最大化面积,取负号end```2.设置限制条件接下来,我们需要定义限制条件。
在这个例子中,我们需要考虑两个限制条件,即x和y的范围以及长度之和的限制。
我们可以使用函数fmincon提供的constr函数来定义这些限制条件。
```matlabfunction [c, ceq] = constr(x)c=[x(1)-20;%x的上限x(2)-10;%y的上限x(1)+x(2)-30];%长度之和的限制ceq = []; % 无等式限制end```3.求解问题有了目标函数和限制条件,我们可以使用fmincon函数来求解问题。
```matlabx0=[10,5];%初始猜测lb = [0, 0]; % x和y的下限ub = [20, 10]; % x和y的上限options = optimoptions('fmincon', 'Display', 'iter'); % 设置选项```在这里,我们使用了初始猜测x0、x和y的上下限lb和ub以及其他选项。