基于IEEE 802.11p1609的车辆防追尾碰撞终端系统设计与实现-论文
- 格式:pdf
- 大小:917.38 KB
- 文档页数:6

汽车防追尾和防侧撞安全系统设计汽车防追尾和防侧撞安全系统设计汽车是现代社会人们出行的重要工具,但是在汽车行驶过程中,由于各种原因,如速度不当、距离不够、驾驶员疲劳等,易发生追尾、侧撞等事故,严重威胁驾乘人员生命安全。
为此,车辆防追尾和防侧撞安全系统的研发与推广具有重要意义。
本文就此展开探讨,设计一种汽车防追尾和防侧撞安全系统。
一、系统原理汽车防追尾和防侧撞安全系统由车辆上的多个传感器组成,包括雷达、摄像头和红外线等设备,这些设备通过计算机系统形成了一个控制单元。
当车辆前方出现障碍物,传感器就会向控制单元发出信号,控制单元会像驾驶员发出警告信号,警告驾驶员有障碍物。
如果驾驶员没有采取任何行动,控制单元会自动采取措施,如制动等,避免发生碰撞,从而保障驾驶员的安全。
二、系统特点1.预警及时该系统具有高灵敏度,能够及时发现障碍物,为驾驶员提供预警信息,尽早提醒驾驶员注意安全行车。
2.制动迅速当车辆前方出现障碍物时,控制单元会迅速采取措施如制动等,以避免发生碰撞。
3.适应性强该系统能够适应各种车型、环境和天气,具备很强的适应性。
4.运行稳定该系统使用先进的传感器和控制单元技术,具备非常稳定的运行性能,系统运行过程中不会出现任何问题,可靠性较高。
三、系统设计系统由三大部分组成:前端传感器、控制单元和驾驶员提示器。
前端传感器包括多个雷达、摄像头和红外线传感器等设备,放置在车辆的前部区域,用于检测前方障碍物信息。
当检测到障碍物信息时,前端传感器会向控制单元发送信号,控制单元会根据障碍物的距离、速度等信息,进行数据处理和预警。
控制单元是系统中的核心部分,接收前端传感器发出的信号,并根据预设的算法进行相应预警和判断,如果判断存在危险,系统会向驾驶员提示,同时启动制动系统,以避免发生碰撞。
驾驶员提示器一般为声音警告器和LCD显示屏,声音警告器会通过语音提示驾驶员,提示障碍物的位置、距离、速度等信息,LCD显示屏则可以显示具体的障碍物信息。

3232009年第01期,第42卷 通 信 技 术 Vol.42,No.01,2009总第205期 Communications Technology No.205,TotallyIEEE802.11P:车载环境下的无线局域网金 纯①②, 柳 兴①, 万宝红②, 周晓军②(①重庆邮电大学,重庆 400000;②重庆金瓯科技发展有限责任公司,重庆 400000)【摘 要】汽车在能够与路上相遇的汽车通信前,不能容忍长时间的建立连接而产生的延时,加上飞速行驶的汽车和复杂的道路状况给物理层带来了很大的挑战。
IEEE802.11P的研究是基于IEEE802.11解决汽车网络的方案。
由于设计的IEEE802.11标准在灵活性上很差,所以IEEE802.l1p标准主要是解决快速连接高频率切换问题和新的安全问题。
【关键词】IEEE 802.11;自组织网;车载环境下的无线通信;基本服务集【中图分类号】TP393.17 【文献标识码】A 【文章编号】1002-0802(2009)01-0323-03IEEE802.11p: Wireless Access in Vehicular EnvironmentsJIN Chun①②, LIU Xing ①, WAN Bao-hong ②, ZHOU Xiao-jun ②(①Chongqing University of Posts and Telecommunications, Chongqing 400000, China; ②Chongqing JINOU Science and Technology Development Co., Ltd, Chongqing 400000, China)【Abstract】Vehicular safe communications applications could not tolerate long connection establishment delays before being enabled to communicate with other vehicles encountered on the road. Additionally, the rapidly moving vehicles and complex roadway environment present great challenges at the PHY level. The research of IEEE 802.11p is based on IEEE 802.11 solutions for vehicular networks. For the design of original IEEE 802.11 standard is no good in flexibility, the IEEE802.l1p working group mainly addesses such problems as frequent disconnection and handover, including new safety problem. This paper gives an overview and general applications of IEEE802.11p.【Key words】IEEE 802.11;Ad Hoc;WAVE;BSS0 引言近年来汽车网络越来越受到人们的关注,联邦通信委员会为了提高高速公路上的安全和效率,针对汽车通信的特殊环境出炉IEEE 80211p标准。

预防汽车追尾系统设计The design of avoiding the rear-end collision system吴昌东1,江桦2,吴学杰 3Wu Chang-dong 1, Jang Hua2a, Wu Xue-jie 2b摘要:介绍了预防公路追尾碰撞报警系统,系统由信息采集单元、中央控制单元、报警电路和显示输出单元构成。
信息采集单元由4种传感器完成对车辆运行状态信号的采集,中央控制单元对输入信息进行分析、处理,完成防碰撞预测与判断功能,报警电路产生警报,提醒驾驶员采取措施以避免追尾碰撞事故发生,系统还具备显示功能。
关键词:传感器信息采集追尾碰撞报警系统中图分类号:TM930 文献标识号:AAbstract:The article introduces the warming system when a traffic accident caused by Rear-end collision between two cars . The system includes the collecting information unit , the central controlling unit, the alarm circuit and the display unit etc. First, the car running states are collected by four sensors, Then, All of the collecting information is analyzed and judged by a single chip microcomputer, forecasting and judging will be complicated, If there is a hidden trouble of rear-end collision accident, an alarm will be given ,In addition, display unit is designed.Key words:sensor collecting information rear-end collision alarming system 0、引言近年来,中国经济得到迅猛发展,私家车拥有量快速增长,公路建设也快速发展,与此同时,交通事故频发,原因是多方面的,诸如路况差,车速高引起驾驶员视觉变差,气候条件差等。
收稿日期:2010-09作者简介:曹颖荣(1985)),女,在读硕士研究生,主要从事智能交通方面的研究。
IEEE 802.11p 无线车载自组网络协议的性能分析与模拟曹颖荣,林小玲(上海大学机电工程与自动化学院,上海200072)摘要:IEEE 802.11pW AVE(W i re l ess A ccess i n V eh icu l ar Environment)通信协议主要用于高速率的车辆之间(V 2V:V eh icu l ar toV ehicular)以及车辆与路边基础设施之间(V 2I :V ehicular to Infrastructure)的资料数据交换。
文章主要对N S-2下IEEE 802.11p 的网络性能的模拟情况进行了研究。
首先介绍了WAV E 系统以及IEEE 802.11p 协议标准,在此基础上采用N S-2仿真软件对I EEE 802.11p 协议进行模拟,同时还对IEEE 802.11a 协议进行仿真,并对两者仿真结果进行分析总结。
验证了IEEE 802.11p 协议是专为车载无线网络设计的一种协议的合理性。
关键词:车辆自组网;I EEE 802.11p ;网络仿真中图分类号:T P393 文献标识码:A 文章编号:1006-2394(2011)02-0019-04Perfor mance Analysis and Si m ul ation of IEEE 802.11p W ireless Protocoli n Vehicle Ad -hoc Net w orksC AO Y ing -rong ,LIN X iao -ling(Schoo l ofM echatron ics Eng ineer i ng and A utom ati on ,Shangha iU n i ve rsity ,Shangha i 200072,Ch i na)Abst ract :I EEE 802.11p WAVE (W ireless A ccess i n Veh icular Env ir onm ent)protoco l is m ainly used for h i g h -speed infor m a ti o n and data exchange bet w een veh icles (V2V:Veh icular to Veh icular),and bet w een vehicles and road -si d e i n frastr ucture (V2I :V eh i c u lar to I n frastr ucture).The perfor m ance of I EEE 802.11p usi n g NS -2si m ulato r hasbeen st u died in this paper .First of al,l the WAVE syste m and t h e I EEE 802.11p protocol standar ds are investi g ated .On th is basis ,the paper uses NS-2si m u lation soft w are to si m u l a te the I EEE 802.11p and I EEE 802.11a .The si m u la -ti o n resu lts are ana l y zed and su mm arized .It is verifi e d that the I EEE 802.11p protocol is desi g ned reasonably for t h e ve -h icular w ireless net w or k.K ey w ords :vehic l e ad -hoc net w ork (VANET);I EEE 802.11p;net w or k e m u lation0 引言车载自组网(VANET)是道路上车辆之间(V 2V )、车辆与路边接入点之间(V2I)可以相互通信的Ad -hoc 网络。
基于802.11p协议改进的车辆测距算法作者:李井真崔学荣李忠伟李娟李冰来源:《微型电脑应用》2020年第03期摘要:随着交通事故的增长和智能交通的发展,基于车辆碰撞预警和交通管理的新服务引起了广泛关注。
目前,基于全球导航卫星系统(GNSS)的定位技术已应用到车辆环境中。
由于GNSS存在的盲区(例如森林,隧道等)会导致定位结果不准确,在车辆自组织网络(VANET)中,提出了基于IEEE 802.11p标准的定位方法。
提出了用IEEE 802.11p短前导码的高效到达时间(TOA)或测距估计方法,以降低低信噪比(SNR)的影响。
使用了自相关和互相关(混合相关)来执行到达时间(TOA)估计,对相关结果进行间隔求和的方法以达到更精确定位的目的。
在加性高斯白噪声(AWGN)信道中的仿真结果表明:在低SNR条件中,提出的测距方法相比传统方法达到了更高的精度。
关键词:TOA估计; IEEE 802.11p; VANET; 混合相关中图分类号: TN914文献标志码: AAbstract:As the growth of traffic accidents and the development of intelligent transportation,new services like vehicle collision warning and traffic management are required. Nowadays, many location techniques based on the global navigation satellite system (GNSS) have been used in vehicle environment. In view of inaccuracy positioning results in GNSS-dark area such as forest,tunnel, etc, high-mobility positioning methods used IEEE 802.11p standard in vehicular ad hoc networks (VANETs) should be developed. In this paper, we propose an efficient TOA or ranging estimation method using IEEE 802.11p short preamble in order to mitigate the influence of low signal noise ratio (SNR). At first, the TOA estimation is performed using autocorrelation and cross-correlation (auto-cross). Then, an approach is presented for finding the accurate time offset. Simulation results, in an additive white Gaussian noise (AWGN) channel, indict that the proposed ranging method achieves superior accuracy than traditional methods even in low SNR conditions.Key words:TOA estimation; IEEE 802.11p; VANETs; Cross-correlation(Auto-cross)0 引言根據世界卫生组织(WHO)2015年的报告,即使道路交通安全已经改善,死亡人数仍然高达每年125万人,并且成为15-29岁年轻人死亡的主要因素[1]。
IEEE 802.11p协议分析与研究的开题报告一、选题依据随着现代智能交通系统的不断发展,车联网技术逐渐成为了提高道路交通安全、缓解交通压力以及促进车辆能源管理的重要手段之一。
而IEEE 802.11p协议作为一种针对车联网的无线通信技术,具有低延迟、广播多播传送和高速移动的优势,在车联网的应用场景中被广泛应用。
然而,随着车联网应用场景的不断扩大,IEEE 802.11p协议面临着越来越多的挑战,包括多车辆间的互联、传感器网络的大规模应用等。
因此,对IEEE 802.11p协议的分析与研究具有重要意义,可以为车联网的应用提供参考和指导。
二、研究内容和目标本次研究的主要内容将围绕以下几个方面展开:1. IEEE 802.11p协议的基本原理和特点:阐述IEEE 802.11p协议的研究背景、基本原理和特点,包括物理层、MAC层的协议描述以及安全机制等。
2. IEEE 802.11p协议的性能分析:通过实验数据和仿真结果,分析IEEE 802.11p协议的性能表现,包括延迟、吞吐量、信道利用率等方面的指标。
3. IEEE 802.11p协议的优化研究:基于性能分析结果的基础上,针对IEEE 802.11p协议的不足之处进行优化研究,包括信道分配机制、干扰抑制、网络拓扑结构等方面的研究。
本次研究的目标是,通过对IEEE 802.11p协议的深入分析和研究,揭示该协议在车联网应用场景中的优缺点,为车联网应用提供更为有效的通信手段和技术支持。
三、研究方法和拟定计划本次研究将采用文献调研、实验分析和仿真模拟等方法,具体计划如下:1. 文献调研:收集相关文献,包括论文、书籍、标准文件等,梳理IEEE 802.11p协议的基本原理和特点。
2. 实验分析:通过实验测试的方式收集数据,分析IEEE 802.11p协议的性能表现及其存在的不足。
3. 仿真模拟:利用网络仿真软件对IEEE 802.11p协议的性能进行模拟,实现对协议的优化研究。
IEEE 802.11p车载自组网络协议的EDCA自适应退避算法研
究
张俊健;吴悦
【期刊名称】《计算机工程与科学》
【年(卷),期】2014(36)10
【摘要】IEEE 802.11p是IEEE针对车辆网络颁布的物理层与MAC层标准,网络中车辆密度是动态变化的,而IEEE 802.11p协议没有提出根据网络情况动态调整EDCA参数来优化网络性能.为了解决网络中节点密度变化带来的吞吐量低、碰撞率高的问题,提出一种EDCA自适应退避优化算法.仿真实验结果表明,该算法相对于传统EDCA算法,性能大幅度提高.
【总页数】5页(P1932-1936)
【作者】张俊健;吴悦
【作者单位】上海大学计算机工程与科学学院,上海200444;上海大学计算机工程与科学学院,上海200444
【正文语种】中文
【中图分类】TN915.04
【相关文献】
1.基于IEEE 80
2.11p的车载无线通信原型系统的实现 [J], 陈娟;蔡孙增;朱正航;蒋海平;康凯
2.IEEE 802.11p车载自组网协议研究 [J], 董敏娥;刘龙伟
3.基于相对速度的802.11p车载网络自适应退避算法 [J], 魏李琦;肖晓强;陈颖文;徐明;樊海宽
4.基于IEEE 802.11p的车载自组网MAC层接入算法RLBSA [J], 何晋;陈思洋;朱西平
5.IEEE802.11p无线车载自组网络协议的性能分析与模拟 [J], 曹颖荣;林小玲因版权原因,仅展示原文概要,查看原文内容请购买。
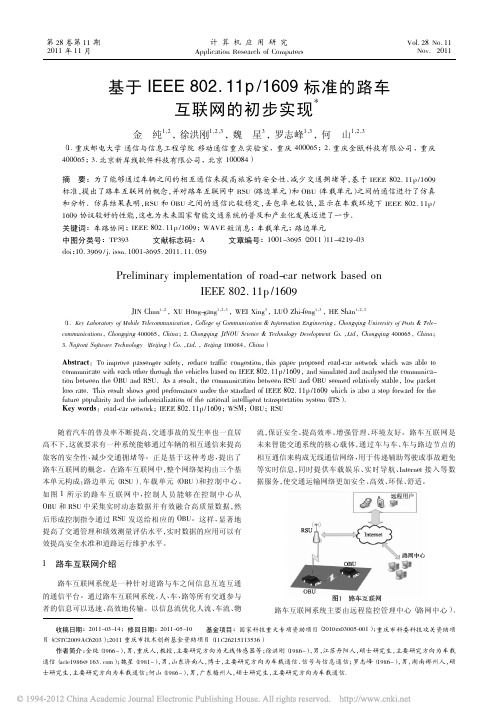
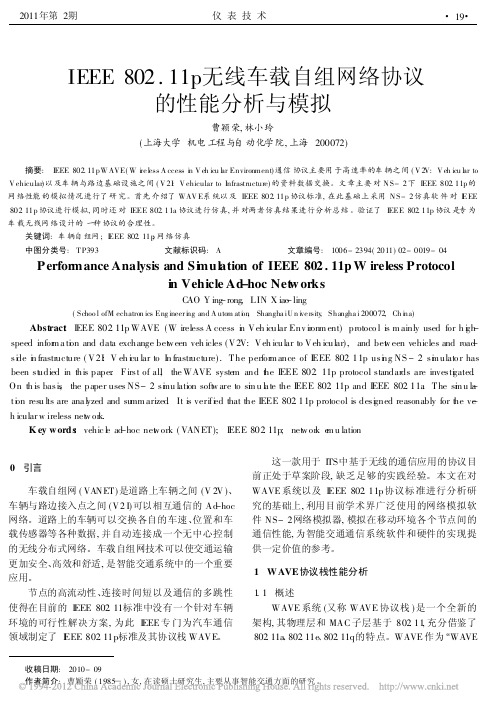
基于I E E E802.11p /1609的车辆防追尾碰撞终端系统设计与实现∗徐淑雨1㊀卢红洋2һ㊀成㊀健2(1.交通运输部公路科学研究院㊀北京100088;2.中国交通通信信息中心㊀北京100011)摘㊀要㊀车辆追尾碰撞是道路交通最主要的事故形态,车辆防追尾碰撞技术受到国内外学者的广泛关注.文中基于I E E E802.11p /1609标准设计了车辆防追尾碰撞终端系统.系统由F r e e s c a l e 硬件平台与嵌入式L i n u x 软件平台构成,采用全球定位系统技术实时获取车辆位置等信息,通过WA V E 技术使车辆间形成高速双向交互式通信,实现车辆防追尾碰撞实时预警.通过系统通信性能测试和防追尾碰撞预警测试.通信性能测试结果表明,所设计终端系统能够较好实现高效㊁可靠通信,在静态和动态条件下,车辆采用B P S K 调制方式时丢包率不高于10%,可很好的满足车辆安全可靠性需求;而防追尾碰撞预警测试结果表明,该终端系统能比较真实地反映实际的驾车情形,及时给出预警,预警准确率高达97%,具有较好的可用性.关键词㊀交通安全;车辆防追尾碰撞;终端系统设计;I E E E802.11p /1609标准;车间通信;F r e e s c a l e 硬件平台中图分类号:T P 315㊀㊀文献标志码:A㊀㊀d o i :10.3963/j.i s s n1674G4861.2015.04.020D e s i g na n d I m pl e m e n t a t i o no f t h eV e h i c l eR e a r GE n dC o l l i s i o n A v o i d a n c eT e r m i n a l S ys t e mB a s e d o n I E E E802.11p /1609X US h u y u 1㊀L U H o n g y a n g 2㊀CH E N GJ i a n 2(1.R e s e a r c hI n s t i t u t e o f H i g h w a y M i n i s t r y o f T r a n s p o r t ,B e i j i n g 100088,C h i n a ;2.C h i n aT r a n s p o r tT e l e c o mm u n i c a t i o n s&I n f o r m a t i o nC e n t e r ,B e i j i n g 100011,C h i n a )A b s t r a c t :R e a r Ge n d c o l l i s i o n i s o n e o f t h em a i n t y pe s of t r a f f i c c o l l i s i o n so n t h e r o a d .T h e r e f o r e ,r e a r Ge n dc o l l i s i o n a v o i d a n c e t e c h n o l og yh a s a t t r a c t e de x t e n si v e a t t e n t i o no f n u m e r o u s r e s e a r c h e r s a r o u n d t h ew o r l d .T h i s p a p e r p r o po s e sa r e a r Ge n d c o l l i s i o na v o i d a n c e s y s t e mb a s e do n t h e I E E E802.11p /1609p r o t o c o l s .T h e s y s t e mc o n s i s t s o f aF r e e s c a l e h a r d Gw a r e p l a t f o r ma n da s o f t w a r e p l a t f o r mb a s e do n a n e m b e d d e dL i n u xO S .R e a l Gt i m e l o c a t i o n i n f o r m a t i o no f e a c hv e h i c l e i so b t a i n e db y G l o b a l P o s i t i o n i n g S ys t e m (G P S ).A w i r e l e s s a c c e s s i nv e h i c u l a r e n v i r o n m e n t s (WA V E )i s u s e d t o p r o v i d e a h i g h Gs p e e da n d t w o Gw a y i n t e r a c t i v ec o mm u n i c a t i o nb e t w e e nv e h i c l e s f o r r e a l Gt i m er e a r Ge n dc o l l i s i o n w a r n i n gs .T h e p e r Gf o r m a n c e o f t h e s y s t e mi s t e s t e d .T e s t r e s u l t s s h o wt h a t t h e p r o p o s e d s y s t e mc a n p r o v i d e h i g h e f f i c i e n t a n d r e l i a b l e c o m Gm u n i c a t i o n s b e t w e e n v e h i c l e s .T h e p a c k e t l o s s r a t e i s l e s s t h a n 10%w i t hB i n a r y P h a s e S h i f tK e y i n g (B P S K )u n d e r e i t h e r s t a t i c o r d y n a m i c v e h i c l e o p e r a t i n g s t a t e .A n d t h e r e s u l t s s h o wt h a t t h e s y s t e md e v e l o p e dc a ne f f e c t i v e l y c a p t u r e t h ed i f Gf e r e n t d r i v i n g b e h a v i o r s a n d p r o v i d ew a r n i n g s i na r e a l t i m ew i t hah i g ha c c u r a c y o f 97%.T h e s t u d y r e s u l t s i n d i c a t e t h a t t h e p r o p o s e d s y s t e mi s e f f e c t i v e f o r f i e l d i m p l e m e n t a t i o n .K e y wo r d s :t r a f f i c s a f e t y ;r e a r Ge n d c o l l i s i o n a v o i d a n c e ;s y s t e md e s i g n ;I E E E802.11p /1609s t a n d a r d s ;i n t e r Gv e h i Gc l e c o mm u n i c a t i o n ;F r e e s c a l eh a r d w a r e p l a t f o r m收稿日期:2014G07G16㊀㊀修回日期:2015G05G26㊀∗国家863计划项目(批准号:2014A A 123103)资助第一作者简介:徐淑雨(1982-),硕士,工程师.研究方向:交通运输信息化.E Gm a i l :s y.x u @r i o h .c n ㊀һ通信作者:卢红洋(1986-),硕士,工程师.研究方向:卫星导航㊁主动安全.E Gm a i l :l u h o n g y a n g@c t t i c .c n 721基于I E E E802.11p /1609的车辆防追尾碰撞终端系统设计与实现徐淑雨㊀卢红洋㊀成㊀健0㊀引㊀言随着生活水平的不断提高,汽车成为人们日常出行的主要交通工具之一,我国2013年汽车保有量已达到1.37亿辆[1].汽车给人类社会带来便利的同时也带来了诸多问题,尤其以交通安全问题最为严重,这也是困扰当今交通领域的三大难题之一.根据世界健康组织的预测,到2020年,交通事故伤害在数量上将上升65%,成为造成人类伤残的第三大因素,造成的经济损失占到全球G D P的1%~2%[2].而在交通事故中,车辆追尾碰撞是比较常见的,是公路上最主要的事故形态.通过对交通事故的分析表明,80%以上的车祸是由于驾驶员没有及时做出反应所造成的,超过65%的车辆间相撞属于追尾碰撞[3].为降低追尾碰撞造成的影响,世界各国展开了对车辆追尾碰撞预警系统的研究,已经有了许多的成果,如基于环境感知的各类追尾碰撞预警系统,包括雷达系统[4]㊁红外系统[5]㊁基于环境感知与机电控制相结合的系统[6]等.同时,作为预警系统的关键技术之一,以追尾和安全距离数学模型为基础的预警算法也不断涌现,如基于安全车距[7G8]或碰撞时间[9]的预警算法等.然而通过环境感知方法所获取的车辆信息噪声较大,易受环境影响,难以有效区分干扰目标,而且无法获取车辆间相对加速度信息,使其应用受到限制.随着车车通信(v e h i c l eGt oGv e h i c l e,V2V)技术的不断发展,很多学者对基于G P S与V2V[10G11]的防追尾碰撞技术进行了研究.将这两者结合,可以使车辆获取较为全面㊁准确的信息,但其有效性在V2V通信受到干扰而被屏蔽或延时时,导致信息的不准确甚至无法获取,影响预警系统性能.近年来,基于WA V E(w i r e l e s s a c c e s s i n v e h i c u l a r e n v i r o n m e n t,车载环境下无线接入)的车载无线通信系统[12G13]的核心关键技术的研究也在不断进步,促使V2V通信性能不断提高,时延㊁丢包率等也得到有效改善.如文献[14]提出1种分析模型通过性能参数如平均传输延迟㊁包传输率㊁包接收率,评估高速公路上车辆的安全相关服务的性能;文献[15]提出1种能够动态调整C C H和S C H 间长度的可变控制信道间隔多信道接入机制,在保证重要安全信息优先传播的前提下,可显著提高S C H s的饱和吞吐量和降低服务包的传输延迟.这些研究成果也为本文的研究提供了理论基础和有力支持.笔者基于WA V E协议标准,包括I E E E802.11p及1609协议族,构建了车辆防追尾碰撞终端系统的硬件㊁软件设计及实现方案,并通过实地测试,对系统的可行性进行了评价. 1㊀车辆防追尾碰撞终端系统设计与实现㊀㊀车辆防追尾碰撞终端系统通过车载单元(o n b o a r du n i t,O B U)实现车与车通信.当前车辆车载单元O B U采集自身车辆G P S定位信息㊁车辆状态信息,并将这些信息由D S R C(d e d i c a t e d s h o r tr a n g ec o mm u n i c a t i o n s,专用短程通信技术)模块实时地发送给周边其他车辆的车载单元O B U,同时接收来自其他车辆车载单元O B U播发的位置和状态信息.当前车辆信息处理单元将接收到的其他车辆的位置与状态信息与自身信息相比对,判断是否对当前车辆造成威胁.若有,则将危险按等级分类,给出报警信息,提醒驾驶者注意,并采取相应措施以避开危险,提高交通车辆安全性.1.1㊀硬件设计由于车辆主动安全通信要求终端接入及时㊁信息收发实时性强等,对终端设备性能要求较高,因此,本终端设计采用一主多从的模块化系统方案,G P S数据接收与处理㊁D S R C数据收发㊁数据显示模块通过相应接口与主处理器相连,每个功能模块在主处理器协调控制下单独运行,完成数据通信与交互.这种设计模式便于模块故障排查,有利于终端稳定性的提高.为此系统选择具有功耗低㊁稳定性良好等特点的,符合车规级的F r e e s c a l e I.M X6嵌入式开发板作为研发基础.该开发板采用A R M架构的C o r t e x A9处理器,主频1G H z,512M BD D R内存,L i n u x嵌入式操作系统,具有串口㊁U S B接口㊁以太网接口㊁C A N 接口㊁音频口㊁视频口㊁P C I口等,能够很好满足终端系统的设计需求.终端系统车载单元O B U硬件结构见图1.车载单元O B U硬件结构主要包含如下模块.1)车辆接口模块.本模块主要完成O B U内外各模块的连接,为数据可靠通信和交互提供保障.采用C A N(c o n t r o l l e r a r e an e t w o r k)总线接口与车辆连接,通过C A N总线接口采集车辆加速度㊁速度㊁刹车㊁转向灯等动态信息.821交通信息与安全㊀2015年4期㊀第33卷㊀总192期2)L C D 显示模块.本模块通过开发板提供的V G A 接口外接L C D 显示屏,主要从处理器接收数据处理后的结果,处理后的结果以预警信息图片的方式提供给驾驶者,直观㊁简便.3)G P S 数据接收与处理模块.G P S 模块选取U B L O XL E A 4S 模块,模块包括基带与射频模块,外置天线,接收灵敏度高,定位实时精确.G P S 模块主要完成G P S 定位信号与同步时间的提取,对G P S 信号进行解调和滤波处理,解算出G P S 卫星的导航报文,获得车辆导航定位的位置㊁方向等数据.4)D S R C 数据收发模块.该模块主要完成周边车辆D S R C 信息的接收和自身车辆D S R C 信息的播发.本文D S R C 模块选择U n e x 公司的D C MA G86P 2模块,模块采用m i n i P C I 接口,需要将开发板P C I 接口转换为m i n i P C I 接口.模块可工作于5.850~5.925G H z 的频率范围内,支持I E E E802.11p 协议,传输速率达到13.5M b /s ,包含主控模块及射频模块.图1㊀车载单元硬件结构F i g.1㊀H a r d w a r e a r c h i t e c t u r e o f t h eO B U 1.2㊀软件设计1.2.1㊀终端操作系统设计在F r e e s c a l e 开发板嵌入式硬件设计基础上进行系统软件设计,L i n u x 系统提供串口㊁U S B ,P C I ,C A N ,L C D 等设备驱动程序,降低了系统软件开发的难度,应用层程序通过调用标准接口对设备进行操作.硬件D S R C 模块实现了物理层与部分MA C 层协议,驱动程序需要对P C I 控制器进行设置,通过P C I 接口配置D S R C 模块,包括初始化㊁设置发送接收操作㊁中断处理等.上层协议由L i n u x 内核实现,编写I E E E1609协议栈,实现1609.4,1609.3,1609.2等协议.同时,L i n u x 给应用层用户提供S o c k e tA P I 接口,用户由具体应用调用接口实现相应的应用,例如,可编写车辆防碰撞应用㊁车辆换道警示等车辆主动安全应用.L i n u x 操作系统内核中已经存在的T C P /I P 网络协议栈模块,以及无线网卡的驱动程序.本文通过修改A t h e r o sa t h 5k 驱动程序实现D C GMA G86P 2网卡的I E E E 802.11p 协议规定的逻辑功能.G P S 模块则采用已有的G P S 驱动程序.对以下程序模块进行单独开发:W S M P 模块,实现I E E E1609.3的路由层功能;L L C 模块,整合W S M P 和I P v 6的数据报文;虚拟网卡层模块,实现I E E E 1609.4所的多信道协调控制;管理层的WM E 和M L M E 模块,为通信双方提供了数据传输通道,并完成WA V E 协议栈的参数的设置与获取等功能.1.2.2㊀车辆防追尾碰撞算法设计车辆防追尾碰撞算法是在WA V E 协议栈基础上开发的.防追尾系统判断流程说明如下:假设A 车代表行驶在前方的车辆,B 车为行驶在后方的车辆,当系统启动后A ,B 2车以10H z 的频率将各自车辆G P S 信息通过D S R C 通信模块播发.当A 车采取刹车措施后,触发刹车板上的触发器,A 车的车载单元将触发的刹车信息及G P S 信息通过D S R C 通信模块发送出去.B 车在播发的同时,也接收其它车辆的信息.B 车接收到A 车G P S 等信息后,通过车载单元的防追尾碰撞算法,对接收到的信息与自身G P S 信息进行判断比较,如果达到碰撞前车的阈值上限,则触发警示程序,通过声音与图像向驾驶员提示,直到驾驶员改变驾驶策略,算法重新解算无危险后解除警示.另外,从2车距离判断,为避免追尾碰撞事故,所探测的己车到目标车辆的距离必须大于制动后2车的距离,否则汽车将有发生追尾碰撞的危险.设R A 为A 车通信范围,R B 为B 车通信范围,D A B 为A ,B 2车相对距离,D s a f e 为A ,B 2车的预警安全距离.采用动力学安全距离模型计算D s a f e 如下[3].D s a f e =v B (t 1+t 2+t 3)+v 2B -v 2A2a+Δd (1)式中:v A ,v B 分别为前车A ㊁后车B 的车速;t 1,t 2,t 3分别为驾驶员的反应时间㊁制动协调时间㊁减速度增长到最大的时间;a 为车辆的最大的制921基于I E E E802.11p /1609的车辆防追尾碰撞终端系统设计与实现徐淑雨㊀卢红洋㊀成㊀健动减速度,且a A=a B=a;Δd为停车后2车的间距.系统的防追尾碰撞算法具体描述见表1.表1㊀车辆防追尾碰撞算法描述T a b.1㊀V e h i c l e r e a rGe n d c o l l i s i o na v o i d a n c ea l g o r i t h md e s c r i p t i o nI n i t(A),I n i t(B)㊀㊀//初始化A㊁B车程序i fD A BɤR A a n d D A BɤR B㊀//2车在通信范围内s e n d(B G P S,A),s e n d(A G P S,B)㊀//2车分别以10H z 播发自身位置信息r e c e i v e(B,A G P S),r e c e i v e(A,B G P S)㊀//2车分别接收其他车辆位置信息e n d i fw h i l e c o n n e c t(A,B)d o㊀㊀//2车在通信范围内C o m p a r e(A G P S,B G P S)㊀//比较2车位置信息,计算航向夹角,相对位置,相对速度等C o m p u t eD s a f e(A,B)㊀//计算2车间的预警安全距离(通过车辆速度,位置,加速度等)i f㊀㊀D(A,B)ɤs a f e t y(A,B)㊀//B车当前行进策略可追尾碰撞前车A㊀㊀A l a r m(B)㊀㊀//B车触发警示提醒B车驾驶员e l s e㊀㊀C l e a rA l a r m(B)㊀㊀//消除B车警示提醒e n d i fe n dw h i l ei fD A B>R A㊀a n d㊀D A B>R B㊀㊀//2车不在通信范围内d i s c o n ne c t(A,B)㊀//A,B失去通信e n d i f2㊀系统测试2.1㊀测试环境设置测试场地选择了1段车辆少的公路,分别进行系统通信性能测试和防追尾避碰测试.其中,通信性能测试主要测试了不同调制㊁不同速度㊁不同通信距离㊁不同数据包长度等条件下的通信速表2㊀测试参数设置T a b.2㊀T e s t p a r a m e t e r s e t t i n g s参数值车辆移动速度30~120k m/h无线传播模型T w o R a y G r o u n dMA C层协议I E E E802.11p路由层协议A O D V应用层协议W S M P工作频率5.895G H z信道带宽10MH z发送功率0.1W发送消息频率10H z 率及丢包率;防追尾碰撞测试则通过安装防追尾终端时车辆预警情形,验证防追尾终端系统的可行性,即验证通过模型计算出的安全距离和终端系统输出的预警信息是否符合实际驾车情况.具体测试参数见表2.2.2㊀通信性能测试采用从O B U端在静态条件下不同距离持续发送W S M P(w a v e s h o r tm e s s a g e p r o t o c o l,W A V E 短信息通信协议)数据包,O B U接收后立即回应相同大小的W S M P数据包的形式,进行数据包丢包率测试.设定O B U发射功率为100mW,静态条件下的2车车间距离分别为470m和683m(即d=470m和d=683m),每次发送端O B U发送10000个数据包,数据包大小(用B表示)分别为400B y t e s和100B y t e s(即B=400B y t e s和B=100B y t e s),测得通信系统在不同的调制模式下的丢包率见图2.由图2可知,通信车辆处于静止状态,当车间距近时,B P S K调制模式未出现丢包现象,Q AM16调制模式丢包率较大,而且传输的数据包越大丢包越严重;随着车间距增大,丢包现象明显加重,只有B P S K(b i n a r y p h a s e s h i f t k eGy i n g,二进制相移键控)模式丢包率略低,在可接受范围内(丢包率不高于10%),Q AM16调制模式下的数据包几乎全部丢失.可见,丢包率与编码方式和通信距离密切相关,通信距离越大,传输速率越高,丢包现象越严重,在车载通信环境下,可靠通信应优选B P S K方式.图2㊀静止车辆不同调制模式下的丢包率F i g.2㊀P a c k e t e r r o r r a t e o fm o t i o n l e s s v e h i c l e su n d e r d i f f e r e n tm o d u l a t i o nm o d e s设定O B U发射功率为100mW,通信车辆以30k m/h的平均速度同向行驶,2车车间距离维持在300m和175m左右(即d=470m和d=683m),每次发送端O B U发送5000个数据包,数据包大小分别为400B y t e s和100B y t e s(即B=400B y t e s和B=100B y t e s),测得通信系统在031交通信息与安全㊀2015年4期㊀第33卷㊀总192期不同的调制模式下的丢包率见图3.由图3可知,O B U 移动状态下B P S K 调制模式下的通信效果最佳.运动车辆车间距相同的情况下,传输的数据包越大,丢包越严重;相同传输速率时,随着车间距的增大,丢包率上升.可见,丢包率还受车辆移动速度和和数据包大小的影响,为保证车辆间的可靠通信,可优选B P S K 或Q P S K (qu a d r a Gt u r e p h a s e s h i f t k e y i n g ,正交相移键控)方式.图3㊀运动车辆不同调制模式下的丢包率F i g .3㊀P a c k e t e r r o r r a t e o fm o v i n g v e h i c l e s u n d e r d i f f e r e n tm o d u l a t i o nm o d e s综合上述,在保证数据传输速率和可靠性情况下,车载终端通信时编码方式可选择Q P S K .2.3㊀防追尾碰撞测试分析所设计系统是否能在实际驾车时较好地实现防追尾碰撞的情况,需要进行实际验证和测试.笔者将终端系统直接安装在车辆上进行防追尾碰撞测试.考虑实际测试的危险性,减少测试过程中的损失,只针对同车道上前车静止和前车突然减速2种极端情况进行测试,并统计给出实验结果,见表3和表4(表中数据是若干组测试结果中选取的一部分),其中t 1=1.5s ,t 2=0.2s ,t 3=0.2s ,Δd =5m .由表3和表4可知,当后车获知与前车的实际间距小于预警安全距离时,系统能够正常预警.表3㊀前车静止时的系统验证T a b .3㊀T h e t e s t o f t h e t e r m i n a l s ys t e mu n d e r t h e l e a d i n g v e h i c l e i n s t a t i o n a r yB 车速度/(k m h -1)最大制动减速度/(m s-2)预警安全距离/m 实际相对距离/m 报警状态40538.550正常50550.850危险60564.570正常70579.860危险80596.6100正常905115100危险1005135120危险㊀㊀另外,考虑车辆行驶中受到各种因素的影响,如车辆速度㊁G P S 定位误差㊁交通环境干扰等,本文采取相同参数重复测试的方法进行系统验证.在前车静止时选取B 车速50k m /h ㊁最大制动减速度5m /s 2进行重复测试验证,100次测试中准确率为97%;在前车突然减速时选取A 车速70k m /h ㊁B 车速80k m /h ㊁最大制动减速度5m /s 2进行重复测试验证,100次测试中准确率为95%.可见,该终端系统的预警准确率可以满足车辆应用需求,能够较好的帮助驾驶员实现追尾避碰.综上所述,防追尾碰撞系统能够比较真实的反应实际的驾车情形,及时给出报警,为安全驾驶提供保障.表4㊀前车突然减速时的系统验证T a b .4㊀T h e t e s t o f t h e t e r m i n a l s ys t e mu n d e r t h e l e a d i n g v e h i c l e s u d d e n l y c u t t i n g d o w n s pe e d B 车速度/(k m h -1)A 车速度/(k m h -1)最大制动减速度/(m s-2)预警安全距离/m 实际相对距离/m 报警状态6080515.040正常7080530.440正常8080547.250正常9080565.660危险10080585.670危险3㊀结束语笔者提出了基于I E E E802.11p/1609标准的车辆防追尾碰撞终端系统.经过实地测试,系统能够较好地实现高效㊁可靠通信,工作正常,可真实的反应实际的驾车情形,及时给出预警,有助于道路上车辆的安全驾驶,具有较好的实用价值.然而基于I E E E802.11p /1609标准的车辆防追尾碰撞终端系统实现正常安全预警工作的前提是相关车辆必须安装相应终端系统或设备,所以其普及应用受到一定的限制.同时,复杂的道路交通环境㊁车辆位置定位精度㊁响应时间等也对系统预警的可靠性造成影响.因此,仍需要进一步的研究以实现系统的完善和优化,提高其预警准确率和可靠性,来满足系统的普及应用需求.参考文献[1]㊀中华人民共和国国家统计局.中华人民共和国2013年国民经济和社会发展统计公报[E B /O L ].(2014G02G24)[2014G07G15].h t t p ://w w w.g o v .c n /g z d t /2014G02/24/c o n t e n t _2619733.h t m.N A T I O N A LB U R E A U O FS T A T I S T I C SO FT H E P E O P L E 'SR E P U B L I C O FC H I N A.2013S t a t i s t i Gc a l B u l l e t i no fN a t i o n a lE c o n o m i ca n dS o c i a lD e v e l G131基于I E E E802.11p /1609的车辆防追尾碰撞终端系统设计与实现徐淑雨㊀卢红洋㊀成㊀健o p m e n t o fC h i n a[E B/O L].(2014G02G24)[2014G07G15].h t t p://w w w.g o v.c n/g z d t/2014G02/24/c o n t e n t_2619733.h t m.[2]㊀A L E X A N D E RP,HA L E YD,G R A N TA.C o o p e rGa t i v e i n t e l l i g e n t t r a n s p o r t s y s t e m s:5.9Gg h z f i e l d t r iGa l s[J].I nP r o c.o f t h eI E E E,2011,99(7):1213G1235.[3]㊀武元杰.汽车防追尾碰撞主动安全系统关键技术研究[D].淄博:山东理工大学,2011.WU Y u a n j i e.R e s e a r c hf o rk e y t e c h n o l o g y o fr e a rGe n dc o l l i s i o na c t i v es af e t y s y s t e m[D].Z i b o:S h a nGd o n g U n i ve r s i t y o fT e c h n o l o g y,2011.(i nC h i n e s e) [4]㊀P A R KS,HW A N G JP,K I M E,e t a l.V e h i c l e t r a c kGi n g u s i n g am i c r o w a v e r a d a r f o r s i t u a t i o na w a r e n e s s[J].C o n t r o lE n g i n e e r i n g P r a c t i c e,2010,18(4):383G395.[5]㊀W E N D E RS,D I E T M A Y E RK.3Dv e h i c l e d e t e c t i o nuGs i n g a l a s e r s c a n n e r a n da v i d e o c a m e r a[J].I E TI nGt e l l i g e n tT r a n s p o r t S y s t e m s,2008,2(2):105G112.[6]㊀尹小琴,朱喜行,张盼盼.高速公路车辆防追尾碰撞系统的设计与控制研究[J].汽车工程,2014(9):1080G1084.Y I N X i a o q i n,Z HU X i x i n g,Z HA N G P a n p a n.As t u d y o nt h ed e s i g na n dc o n t r o l o fv e h i c l er e a rGe n dc o l l i s i o na v o id a n ce s y s t e mi nf r e e w a y[J].A u t o m oGt i v eE n g i n e e r i n g.2014(9):1080G1084.(i nC h i n e s e) [7]㊀李智安.一种车辆防追尾碰撞安全系统设计[J].上海汽车,2009(11):38G41.L I Z h i a n.Av e h i c l e r e a rGe n dc o l l i s i o ns a f e t y s y s t e md e s i g n[J].S h a n g h a iA u t o m o t i v e,2009(11):38G41.(i nC h i n e s e)[8]㊀张辉宜,郝小林,袁志祥等.汽车防追尾碰撞的最小安全距离仿真研究[J].计算机仿真,2014,31(11):146G149,207.Z HA N G H u i y i,HA OX i a o l i n,Y U A NZ h i x i a n g,e ta l.S i m u l a t i o nr e s e a r c ho n m i n i m u ms a f e t y d i s t a n c eo f a u t o m o b i l er e a rGe n da n t i c o l l i s i o n[J].C o m p u t e rS i m u l a t i o n,2014,31(11):146G149,207.(i n C h iGn e s e)[9]㊀陆建,张文珺,杨海飞等.基于碰撞时间的追尾风险分析[J].交通信息与安全,2014,32(5):58G64,76.L UJ i a n,Z HA N G W e n j u n,Y A N G H a i f e i,e ta l.A n a l y s i so f r e a rGe n dr i s kb a s e do nt h e i n d i c a t o ro ft i m e t o c o l l i s i o n[J].J o u r n a l o fT r a n s p o r t I n f o r m aGt i o na n dS a f e t y.2014,32(5):58G64,76.(i nC h iGn e s e)[10]㊀宋翔,李旭,张为公.高速公路汽车追尾碰撞预警关键参数估计[J].哈尔滨工程大学学报,2014,(9):1142G1148.S O N G X i a n g,L IX u,Z HA N G W e i g o n g.E s t i m aGt i o no fk e yp a r a m e t e r so fh i g h w a y r e a rGe n dc o l l iGs i o nw a r n i n g[[J].J o u r n a lo f H a r b i n E n g i n e e r i n gU n i v e r s i t y,2014,(9):1142G1148.(i nC h i n e s e) [11]㊀T A L E BT,B E N S L I MA N E A,B e nL K.T o w a r da ne f f e c t i v e r i s kGc o n s c i o u sa n dc o l l ab o r a t i v ev e h i cGu l a r c o l l i s i o n a v o i d a n c e s y s t e m[J].V e h i c u l a rT e c h n o l o g y,I E E ET r a n s a c t i o n s o n,2010,59(3):1474G1486.[12]㊀K E N N E YJB.D e d i c a t e ds h o r tGr a n g e c o mm u n i c aGt i o n s(d s r c)s t a n d a r d s i n t h e u n i t e d s t a t e s[J].P r oGc e ed i n g s o f t he I E E E,2011,99(7):1162G1182.[13]㊀MO R G A N YL.N o t e s o nD S R C&WA V Es t a n dGa r d s s u i t e:i t s a r c h i t e c t u r e,d e s i g n,a n d c h a r a c t e rGi s t i c s[J].C o mm u n i c a t i o n sS u r v e y s&T u t o r i a l s,I E E E,2010,12(4):504G518.[14]㊀Y I N X,M A X,T R I V E D IKS.A n i n t e r a c t i n g s t oGc h a s t i cm ode l s a p p r o a c hf o r t h e p e r f o r m a n c e e v a l uGa t i o no fD S R Cv e h i c u l a r s a f e t y c o mm u n i c a t i o n[J].I E E E T r a n s a c t i o n so nC o m p u t e r s,2013,62(5):873G885.[15]㊀W A N G Q,L E N GS,F U H,e t a l.A n I E E E802.11pGb a s e dm u l t ic h a n n e lm a c s c h e m ew i t h c h a n n e l c o o rGd i n a t i o nf o rve h i c u l a ra dh o cn e t w o r k s[J].I E E ET r a n s a c t i o n s o n I n t e l l i g e n t T r a n s p o r t a t i o n S y sGt e m s,2012,13(2):449G458.231交通信息与安全㊀2015年4期㊀第33卷㊀总192期。