纵坡、竖曲线
- 格式:ppt
- 大小:510.50 KB
- 文档页数:16

纵断面设计——竖曲线设计纵断面上相邻两条纵坡线相交的转折处,为了行车平顺用一段曲线来缓和,这条连接两纵坡线的曲线叫竖曲线。
竖曲线的形状,通常采用平曲线或二次抛物线两种。
在设计和计算上为方便一般采用二次抛物线形式。
纵断面上相邻两条纵坡线相交形成转坡点,其相交角用转坡角表示。
当竖曲线转坡点在曲线上方时为凸形竖曲线,反之为凹形竖曲线。
一、竖曲线如图所示,设相邻两纵坡坡度分别为i1 和i2,则相邻两坡度的代数差即转坡角为ω= i1-i2 ,其中i1、i2为本身之值,当上坡时取正值,下坡时取负值。
当i1- i2为正值时,则为凸形竖曲线。
当i1 - i2 为负值时,则为凹形竖曲线。
(一)竖曲线基本方程式我国采用的是二次抛物线形作为竖曲线的常用形式。
其基本方程为:若取抛物线参数为竖曲线的半径,则有:(二)竖曲线要素计算公式竖曲线计算图示1、切线上任意点与竖曲线间的竖距通过推导可得:2、竖曲线曲线长:L = Rω3、竖曲线切线长:T= TA =TB ≈ L/2 =4、竖曲线的外距:E =⑤竖曲线上任意点至相应切线的距离:式中:x —为竖曲任意点至竖曲线起点(终点)的距离, m;R—为竖曲线的半径,m。
二、竖曲线的最小半径(一)竖曲线最小半径的确定1.凸形竖曲线极限最小半径确定考虑因素(1)缓和冲击汽车行驶在竖曲线上时,产生径向离心力,使汽车在凸形竖曲线上重量减小,所以确定竖曲线半径时,对离心力要加以控制。
(2)经行时间不宜过短当竖曲线两端直线坡段的坡度差很小时,即使竖曲线半径较大,竖曲线长度也有可能较短,此时汽车在竖曲线段倏忽而过,冲击增大,乘客不适;从视觉上考虑也会感到线形突然转折。
因此,汽车在凸形竖曲线上行驶的时间不能太短,通常控制汽车在凸形竖曲线上行驶时间不得小于3秒钟。
(3)满足视距的要求汽车行驶在凸形竖曲线上,如果竖曲线半径太小,会阻挡司机的视线。
为了行车安全,对凸形竖曲线的最小半径和最小长度应加以限制。

交通工程设计常用名词术语(一)起讫点调查:又称OD(orign destination)调查,对人、车、货的移动,从出发到终止过程的全面情况,以及有关的人、车、货的基本情况进行调查。
包括人的出行OD调查、车辆OD调查、货流OD调查。
OD调查是交通运输规划研究是最基础的调查,可以全面地再现城市交通随机易逝、变化多的特点,能揭示出城市交通症结的原因,内涵交通需求与土地利用、经济活动的规律。
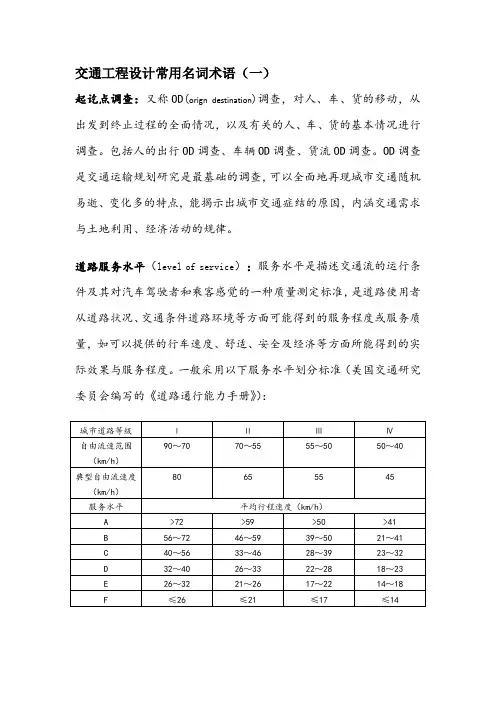
道路服务水平(level of service):服务水平是描述交通流的运行条件及其对汽车驾驶者和乘客感觉的一种质量测定标准,是道路使用者从道路状况、交通条件道路环境等方面可能得到的服务程度或服务质量,如可以提供的行车速度、舒适、安全及经济等方面所能得到的实际效果与服务程度。
一般采用以下服务水平划分标准(美国交通研究委员会编写的《道路通行能力手册》):道路饱和度(road saturation ):道路饱和度是反映道路服务水平的重要指标之一, 其计算公式即为人们常说的V /C (V 为最大交通量,C 为最大通行能力)。
饱和度值越高,代表道路服务水平越低。
由于道路服务水平、拥挤程度受多方面因素的制约,实际中因难以考虑多方面因素,常以饱和度数值作为评价服务水平的主要指标路口交通冲突点(traffic flow conflict point ):来自不同行驶方向的车辆,以较大的角度(或接近90°)相互交叉的交会点称为冲突点。
在没有信号灯管理的交叉口上,直行车流,或左转车流与直行车流,或左转车流在时空上不能错开,会产生冲突点。
由于它们在流向上是相互垂直的,或逆向对流的,所以相互干扰的严重程度超过交汇点和分叉点。
p =(n−1)(n−2)6 式中:p-交叉点个数;n-相交道路条数。
三条道路、四条道路、五条道路相交冲突点示意图信号周期(SIGNAI CYCLE ):信号灯色按设定的相位顺序显示一周所需的时间。
信号周期最大取值一般在180s 左右。
竖曲线竖曲线设计竖曲线定义:纵断面上相邻两条纵坡线相交的转折处,为了行车平顺用一段曲线来缓和,这条连接两纵坡线的曲线叫竖曲线。
竖曲线的形状,通常采用平曲线或二次抛物线两种。
在设计和计算上为方便一般采用二次抛物线形式。
纵断面上相邻两条纵坡线相交形成转坡点,其相交角用转坡角表示。
当竖曲线转坡点在曲线上方时为凸形竖曲线,反之为凹形竖曲线。
一.凹凸竖曲线的判别如图所示,设相邻两纵坡坡度分别为i1 和i2,则相邻两坡度的代数差即转坡角为ω= i2-i1,其中i1、i2为本身之值,当上坡时取正值,下坡时取负值。
当i2- i1为正值时,则为凹形竖曲线。
当i2 – i1 为负值时,则为凸形竖曲线。
二.主要公式坡度差:ω= I2-I1竖曲线曲线长:L = Rω竖曲线切线长:T= TA =TB ≈L/2 = Rω/2或者:T=(I1-I2)/2*R竖曲线的外距: E =T2 /2R修正值:X=D2 /2R其中D为所求点桩号到竖曲线起点或终点的距离三.竖曲线的半径竖曲线半径的确定1.凸形竖曲线极限最小半径确定考虑因素:(1)缓和冲击汽车行驶在竖曲线上时,产生径向离心力,使汽车在凸形竖曲线上重量减小,所以确定竖曲线半径时,对离心力要加以控制。
(2)经行时间不宜过短当竖曲线两端直线坡段的坡度差很小时,即使竖曲线半径较大,竖曲线长度也有可能较短,此时汽车在竖曲线段倏忽而过,冲击增大,乘客不适;从视觉上考虑也会感到线形突然转折。
因此,汽车在凸形竖曲线上行驶的时间不能太短,通常控制汽车在凸形竖曲线上行驶时间不得小于3秒钟。
(3)满足视距的要求汽车行驶在凸形竖曲线上,如果竖曲线半径太小,会阻挡司机的视线。
为了行车安全,对凸形竖曲线的最小半径和最小长度应加以限制。
2.凹形竖曲线极限最小半径确定考虑因素(1)缓和冲击:在凹形竖曲线上行驶重量增大;半径越小,离心力越大;当重量变化程度达到一定时,就会影响到旅客的舒适性,同时也会影响到汽车的悬挂系统。