旋转之前
旋转之后
房子的旋转变 换,旋转的同 时也改变了位 置。
旋转矩阵的推导
小结
2020/7/31
r
正向旋转
r
其中:
齐次坐标系和二维变换的矩阵表示
齐次坐标表示
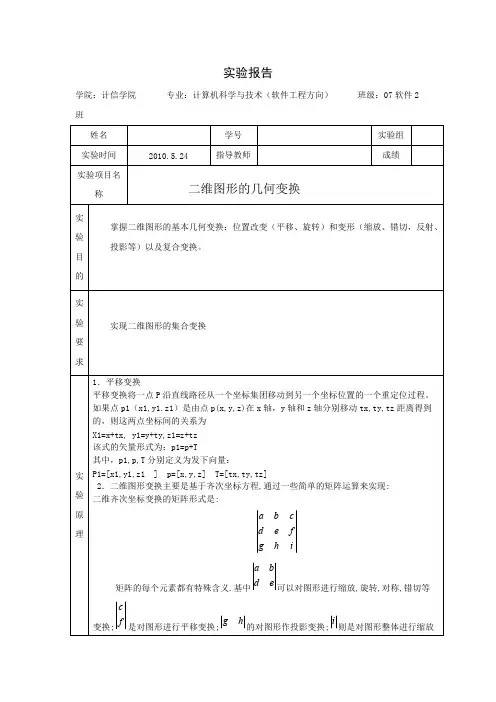
平移矩阵 平移变换
2020/7/31
P=T+P P=S•P P=R•P
希望能用一种一致的方法来表示这三种变换。
将(x,y)附加第三个坐标,于是每个点的坐标都用 一个三元组(x,y,W)来表示,称为点(x,y)的齐次 坐标。在齐次坐标系中,我们认为两组齐次坐标 (x,y,W)和(x,y,W)代表同一点当且仅当(x,y,W)与 (x,y,W)互为倍数,因此(2,3,6)和(4,6,12)是用不同 的三元组坐标表示的同一点。也就是说每个点齐次
坐标不唯一。要求齐次坐标中至少有一个不为零, 即(0,0,0)是不允许的。如果坐标W不为零,那么我 们可以用它作为除数:由(x,y,W)得到(x/W,y/W,1), 它们代表同一点。一般来说,当W不为零时,我们 采用W为1的坐标,并将x/W和y/W称为齐次点 (x,y,W)的笛卡儿坐标。而W=0的点被称为无穷远点 ,在这里我们不讨论此类点。
SHx[x y 1]T=[x+ay y 1] T,表示在 x方向上的比例变化是y的函数。
SHy[x y 1]T=[x bx+y 1] T表示在y 方向上的比例变化是x的函数。
二维变换的复合(例一)
(x1,y1)
(x1,y1)
现在考虑绕任意一点P1旋转物体的问题。 1)将P1点平移到原点; 2)旋转; 3)平移还原P1点。
射变换,只保留线段之间的平行关系,不 保持长度和角度不变。
既不会变成单位边长的菱形,也不会变成非单位边长的正方形。这种变换也被称