《计算机图形学》05 图形的几何变换解析
- 格式:ppt
- 大小:190.00 KB
- 文档页数:2
计算机形学几何变换基础知识全面解析计算机形学几何变换是计算机图形学中一项非常重要的技术,它可以对图像进行平移、旋转、缩放等变换操作,从而实现图像的变形和动画效果。
本文将全面解析计算机形学几何变换的基础知识,包括变换的概念、常见的变换操作及其数学原理等内容。
一、概念介绍计算机形学几何变换是指通过一定的数学变换方法,改变图像或对象的形状、大小和位置。
常用的几何变换包括平移、旋转、缩放和错切等。
以下将逐个介绍这些变换操作的原理及应用。
二、平移变换平移变换是指将一个对象沿着指定方向平行移动一定的距离。
平移变换可以通过对对象中的每个顶点坐标进行相同平移量的加减操作来实现。
设对象的原始坐标为(x,y),平移量为(tx,ty),则平移变换后的新坐标为(x+tx,y+ty)。
三、旋转变换旋转变换是指将一个对象绕着指定的旋转中心点按照一定角度进行旋转。
旋转变换可以通过将对象中的每个顶点坐标绕旋转中心点进行相应角度的旋转来实现。
设对象的原始坐标为(x,y),旋转角度为θ,旋转中心点为(cx,cy),则旋转变换后的新坐标为:x' = (x-cx)*cosθ - (y-cy)*sinθ + cxy' = (x-cx)*sinθ + (y-cy)*cosθ + cy四、缩放变换缩放变换是指将一个对象的大小按照一定比例进行缩放。
缩放变换可以通过将对象中的每个顶点坐标按照指定比例进行缩放来实现。
设对象的原始坐标为(x,y),缩放比例为(sx,sy),缩放中心点为(cx,cy),则缩放变换后的新坐标为:x' = (x-cx)*sx + cxy' = (y-cy)*sy + cy五、错切变换错切变换是指将一个对象的各个顶点坐标按照一定的错切因子进行变换。
错切变换可以分为水平错切和垂直错切两种形式。
水平错切变换可以通过将对象中的每个顶点的y坐标按照指定的错切因子进行变换来实现;垂直错切变换则是将对象中的每个顶点的x坐标按照指定的错切因子进行变换。
几何变换的认识和基本原理几何变换是指通过对平面上的点、线、面进行位置、形状或尺寸上的改变,从而得到一个新的图形。
在计算机图形学和计算机视觉等领域,几何变换是非常重要的基础知识。
本文将介绍几何变换的认识和基本原理。
一、平移变换平移变换是指将一个图形沿着某个方向平行移动一定的距离。
平移变换可以用以下公式表示:[x', y'] = [x + dx, y + dy]其中,(x, y)是原始图形上的一个点,(dx, dy)是平移的距离,(x', y')是平移后得到的新点的坐标。
二、旋转变换旋转变换是指将一个图形绕着某个中心点按照一定的角度旋转。
旋转变换可以用以下公式表示:[x', y'] = [x*cosθ - y*sinθ, x*sinθ + y*cosθ]其中,(x, y)是原始图形上的一个点,θ是旋转的角度,(x', y')是旋转后得到的新点的坐标。
三、缩放变换缩放变换是指将一个图形按照一定的比例因子放大或缩小。
缩放变换可以用以下公式表示:[x', y'] = [s*x, s*y]其中,(x, y)是原始图形上的一个点,s是缩放的比例因子,(x', y')是缩放后得到的新点的坐标。
四、对称变换对称变换是指将一个图形关于某一直线或某一点进行对称。
对称变换可以分为关于x轴对称、关于y轴对称、关于原点对称等。
不同类型的对称变换具体的公式略有不同,但原理都是将图形上的点映射到其关于对称轴的对称位置。
五、仿射变换仿射变换是指将一个图形通过平移、旋转和缩放等基本变换来进行综合变换。
仿射变换可以用以下矩阵表示:[x', y'] = [a*x + b*y + c, d*x + e*y + f]其中,a、b、c、d、e、f为变换矩阵中的参数,(x, y)是原始图形上的一个点,(x', y')是变换后得到的新点的坐标。
图形的几何变换图形的几何变换是指对于一个图形,在平面上或空间中进行比例、旋转、平移、对称等操作后,得到的新图形。
这种操作可以改变图形的大小、方向、位置等特征,广泛运用于数学、物理、美术、计算机图形等领域。
以下从不同变换类型的角度分析图形的几何变换。
一、比例变换比例变换是指将一个图形沿着某个中心点或轴线进行等比例伸缩的变换。
其结果通常是一个形状相似但大小不同的新图形。
比例变换可以分为放大和缩小两种情况,当比例因子大于1时,为放大;比例因子小于1时,为缩小。
比例变换常见的应用包括模型制作、图形的等比例缩放等。
二、旋转变换旋转变换是指将一个图形沿着某个轴心或轴线进行旋转的变换。
旋转变换可分为顺时针旋转和逆时针旋转两种情况,其结果是一个相似但方向不同的新图形。
旋转变换的角度通常用弧度制表示,旋转角度为正时为逆时针旋转,为负时为顺时针旋转,常见的应用包括风车的运动、建筑设计的转角变换等。
三、平移变换平移变换又叫做移动变换,是指将一个图形沿着某个方向进行平移的变换。
平移变换可以将图形整体沿着平移向量的方向进行移动,其结果是一个与原图形相同但位置不同的新图形。
平移变换常见的应用包括机器人的运动、物体的位移等。
平移变换也可以看作是比例变换的特殊情况,比例因子为1,即不改变图形的大小。
四、对称变换对称变换是指将一个图形沿着某个轴线进行翻折的操作。
对称变换可以分为对称、反对称和正交对称三种类型。
对称变换的结果通常是一个与原图形相等但位置镜像对称的新图形。
对称变换在分形几何、美术设计等领域都有着广泛的应用。
五、仿射变换仿射变换是指图形在平面上或空间中进行非等比例伸缩、旋转、平移和投影等操作时的变换。
仿射变换的结果通常是一个与原图形相似但有略微变形的新图形。
仿射变换包括平移变换、旋转变换、比例变换和剪切变换等。
其应用领域包括医学图像处理、计算机图形学等。
总结图形的几何变换在现代科技和艺术中有着广泛的应用。
比例变换常用于造型、模型制作和图形的等比例缩放;旋转变换常用于旋转花纹、风车运动、建筑转角的变化等;平移变换常用于运动控制、物体的位移等;对称变换常用于几何分形、美术设计等领域;仿射变换则是结合了以上变换操作的高级变换,其应用范围更加广泛。
计算机形学中的几何变换与投影技术计算机形学是计算机科学与计算机图形学中重要的一个领域,它研究如何在计算机上对图形进行表示、创建、编辑和呈现。
其中,几何变换和投影技术是计算机形学中常用且核心的技术之一,它们在计算机图形学领域中被广泛应用。
一、几何变换在计算机图形学中,几何变换是指对图形进行平移、旋转、缩放和扭曲等操作,从而改变图形的位置、形状和大小,以满足特定需求。
1. 平移变换平移变换是对图形进行沿着指定方向和距离的移动。
在二维空间中,平移变换可以表示为:x' = x + dxy' = y + dy其中,(x', y')是平移后的坐标,(x, y)是原始坐标,(dx, dy)是平移的向量。
2. 旋转变换旋转变换是对图形进行绕指定点或绕原点的旋转操作。
在二维空间中,旋转变换可以表示为:x' = x * cosθ - y * sinθy' = x * sinθ + y * cosθ其中,(x', y')是旋转后的坐标,(x, y)是原始坐标,θ是旋转角度。
3. 缩放变换缩放变换是对图形进行放大或缩小的操作。
在二维空间中,缩放变换可以表示为:x' = x * sxy' = y * sy其中,(x', y')是缩放后的坐标,(x, y)是原始坐标,(sx, sy)是缩放因子。
4. 扭曲变换扭曲变换是对图形进行形状的变换,使得某些部分被拉伸或收缩。
扭曲变换可以通过矩阵运算进行表示,具体操作较为复杂。
二、投影技术在计算机图形学中,投影技术是指将三维空间中的图形映射到二维平面上的过程。
常见的投影技术包括平行投影和透视投影。
1. 平行投影平行投影是一种保持图形中平行线在投影后保持平行的投影方式。
在三维空间中,平行投影可以表示为:x' = xy' = y其中,(x', y')是投影平面上的坐标,(x, y)是三维空间中的坐标。
第五章图形变换重 点:掌握二维几何变换、二维观察变换、三维几何变换以及三维观察变换。
难 点:理解常用的平移、比例、旋转变换,特别是复合变换。
课时安排:授课4学时。
图形变换包括二维几何变换, 二维观察变换,三维几何变换和三维观察变换。
为了能使各种几何变换(平移、旋转、比例等)以相同的矩阵形式表示,从而统一使用矩阵乘法运算来实现变 换的组合,现都采用齐次坐标系来表示各种变换。
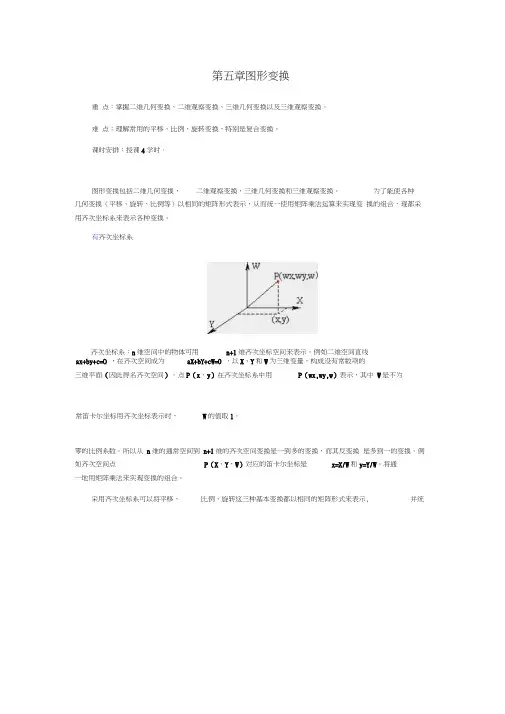
有齐次坐标系齐次坐标系:n 维空间中的物体可用 n+1维齐次坐标空间来表示。
例如二维空间直线 ax+by+c=O ,在齐次空间成为 aX+bY+cW=0 ,以X 、Y 和W 为三维变量,构成没有常数项的 三维平面(因此得名齐次空间)。
点P (x 、y )在齐次坐标系中用P (wx,wy,w )表示,其中 W 是不为零的比例系数。
所以从 n 维的通常空间到 n+1维的齐次空间变换是一到多的变换,而其反变换 是多到一的变换。
例如齐次空间点P (X 、Y 、W )对应的笛卡尔坐标是 x=X/W 和y=Y/W 。
将通一地用矩阵乘法来实现变换的组合。
常笛卡尔坐标用齐次坐标表示时, W 的值取1。
采用齐次坐标系可以将平移、比例、旋转这三种基本变换都以相同的矩阵形式来表示,并统齐次坐标系在三维透视变换中有更重要的作用, 示形它使非线形变换也能采用线形变换的矩阵表式。
图形变换平移变换图示如图所示,它使图形移动位置。
新图 p'的每一图元点是原图形 p 中每个图元点在向分别移动Tx 和Ty 产生,所以对应点之间的坐标值满足关系式x'=x+Tx y'=y+Ty可利用矩阵形式表示成:[x' y' ] = : x y ] + : Tx Ty ]简记为:P'= P+T , T= : Tx Ty ]是平移变换矩阵(行向量)二堆几何变换1 1二维观察变換三维几诃变换平移变换 比例变换 陡转变换 对称变换 错切变换 仿肘变换 复合变换平移变换 比例变换 旋转变换 绕空间任意轴離转 对称变换 蜡切变换三维观察变5.1二维几何变换二维几何变换就是在平面上对二维点的坐标进行变换,从而形成新的坐标。
计算机形学中的几何变换与投影算法基础在计算机图形学中,几何变换与投影算法是实现三维对象表示、变换和可视化的基础。
通过对三维空间中的对象进行变换和投影,可以将其呈现在二维平面上,从而实现更直观的可视化效果。
本文将介绍计算机形学中的几何变换和投影算法的基本概念和应用。
一、几何变换几何变换是指通过对三维对象进行平移、旋转、缩放等操作,改变其在空间中的位置和形状。
在计算机图形学中,常用的几何变换包括平移、旋转、缩放和剪切。
1. 平移平移是指将对象沿着指定方向移动一定的距离。
在计算机图形学中,平移变换可以通过将对象的每个顶点坐标增加一个平移向量来实现。
平移变换公式如下:[x'] = [1 0 0 tx] [x][y'] [0 1 0 ty] [y][z'] [0 0 1 tz] [z][1 ] [0 0 0 1] [1]其中,(tx, ty, tz)表示平移向量。
通过对对象的每个顶点应用上述变换矩阵,可以实现平移效果。
2. 旋转旋转是指将对象绕指定轴进行旋转。
在计算机图形学中,常用的旋转有绕X轴、Y轴和Z轴旋转。
旋转变换可以通过将对象的每个顶点坐标乘以一个旋转矩阵来实现。
旋转变换矩阵的形式如下:[x'] = [1 0 0 0] [x][y'] [0 cosθ -sinθ 0] [y][z'] [0 sinθ cosθ 0] [z][1 ] [0 0 0 1] [1]其中,θ表示旋转角度。
通过对对象的每个顶点应用上述变换矩阵,可以实现旋转效果。
3. 缩放缩放是指改变对象的尺寸大小。
在计算机图形学中,缩放变换可以通过将对象的每个顶点坐标乘以一个缩放因子来实现。
缩放因子分别作用于X、Y和Z轴的坐标,从而改变对象在各个轴上的尺寸。
缩放变换公式如下:[x'] = [sx 0 0 0] [x][y'] [0 sy 0 0] [y][z'] [0 0 sz 0] [z][1 ] [0 0 0 1] [1]其中,(sx, sy, sz)表示缩放因子。

几何变换的基本概念与操作几何变换是计算机图形学中的重要概念,它可以将一个图形对象从一个位置、方向或大小变换到另一个位置、方向或大小,通过不同的变换操作,可以实现各种形状和位置的变化。
本文将介绍几何变换的基本概念和操作,包括平移、旋转、缩放和反射四种变换。
一、平移平移是指将图形对象按照指定的向量在平面内沿着直线移动,其作用是改变图形对象的位置而不改变其形状和大小。
平移操作可以用一个向量表示,向量的坐标分别表示在x轴和y轴方向上的移动距离。
平移操作的数学表达式如下:```P' = P + T```其中,P表示原始点的坐标,P'表示平移后点的坐标,T表示平移向量的坐标。
二、旋转旋转是指将图形对象按照指定的角度围绕一个中心点旋转,其作用是改变图形对象的方向而不改变其形状和大小。
旋转操作可以用一个角度表示,角度的正负决定了旋转的方向。
旋转操作的数学表达式如下:P' = R * P```其中,P表示原始点的坐标,P'表示旋转后点的坐标,R表示旋转矩阵。
三、缩放缩放是指将图形对象按照指定的比例在水平和垂直方向上进行放大或缩小,其作用是改变图形对象的大小而不改变其形状。
缩放操作可以用一个缩放因子表示,缩放因子大于1表示放大,缩放因子小于1表示缩小。
缩放操作的数学表达式如下:```P' = S * P```其中,P表示原始点的坐标,P'表示缩放后点的坐标,S表示缩放矩阵。
四、反射反射是指将图形对象按照指定的轴线进行镜像翻转,其作用是改变图形对象的位置和方向而不改变其形状和大小。
反射操作可以用一个轴线表示,轴线可以是水平、垂直或任意一条直线。
反射操作的数学表达式如下:P' = M * P```其中,P表示原始点的坐标,P'表示反射后点的坐标,M表示反射矩阵。
综上所述,几何变换是计算机图形学中的重要概念,通过平移、旋转、缩放和反射四种基本操作,可以实现对图形对象的位置、方向和大小的变化。

贵州大学实验报告学院:计算机科学与技术专业:计算机科学与技术班级:计科131实验内容#include"stdafx.h"#include<glut.h>#include<stdlib.h>#include<math.h>GLsizei winWidth = 600, winHeight = 600;GLfloat xwcMin = 0.0, xwcMax = 225.0;GLfloat ywcMin = 0.0, ywcMax = 225.0;class wcPt2D{public:GLfloat x, y;};typedef GLfloat Matrix3x3[3][3];Matrix3x3 matComposite;const GLdouble pi = 3.14159;void init(void){glClearColor(1.0, 1.0, 1.0, 0.0);}void matrix3x3SetIdentity(Matrix3x3matIdent3x3){GLint row, col;for (row = 0; row<3; row++)for (col = 0; col<3; col++)matIdent3x3[row][col] = (row == col);//生成{{1,0,0}{0,1,0}{0,0,1}}}void matrix3x3PreMultiply(Matrix3x3m1, Matrix3x3m2){GLint row, col;Matrix3x3 matTemp;for (row = 0; row<3; row++)for (col = 0; col<3; col++)matTemp[row][col] = m1[row][0] * m2[0][col] + m1[row][1] * m2[1][col] + m1[row][2] * m2[2][col];for (row = 0; row<3; row++)for (col = 0; col<3; col++)m2[row][col] = matTemp[row][col];}void translate2D(GLfloat tx, GLfloat ty)//平移{Matrix3x3 matTransl;matrix3x3SetIdentity(matTransl);matTransl[0][2] = tx;matTransl[1][2] = ty;matrix3x3PreMultiply(matTransl, matComposite);}void rotate2D(wcPt2D pivotPt, GLfloat theta)//旋转{Matrix3x3 matRot;matrix3x3SetIdentity(matRot);matRot[0][0] = cos(theta);matRot[0][1] = -sin(theta);matRot[0][2] = pivotPt.x*(1 - cos(theta)) + pivotPt.y*sin(theta);matRot[1][0] = sin(theta);matRot[1][1] = cos(theta);matRot[31][2] = pivotPt.x*(1 - cos(theta)) - pivotPt.y*sin(theta);matrix3x3PreMultiply(matRot, matComposite);}void scale2D(GLfloat sx, GLfloat sy, wcPt2D fixedPt)//缩放{Matrix3x3 matScale;matrix3x3SetIdentity(matScale);matScale[0][0] = sx;matScale[0][2] = (1 - sx)*fixedPt.x;matScale[1][1] = sy;matScale[1][2] = (1 - sy)*fixedPt.y;matrix3x3PreMultiply(matScale, matComposite);}void transformVerts2D(GLint nVerts, wcPt2D * verts)//组合变化后的矩阵{GLint k;GLfloat temp;for (k = 0; k<nVerts; k++){temp = matComposite[0][0] * verts[k].x + matComposite[0][1] * verts[k].y + matComposite[0][2];verts[k].y = matComposite[1][0] * verts[k].x + matComposite[1][1] *verts[k].y + matComposite[1][2];verts[k].x = temp;}}void triangle(wcPt2D*verts){GLint k;glBegin(GL_TRIANGLES);for (k = 0; k<3; k++)glVertex2f(verts[k].x, verts[k].y);glEnd();}void displayFcn(void){GLint nVerts = 3;wcPt2D verts[3] = { { 50.0, 25.0 }, { 150.0, 25.0 }, { 100.0, 100.0 } };wcPt2D centroidPt;GLint k, xSum = 0, ySum = 0;for (k = 0; k<nVerts; k++){xSum += verts[k].x;ySum += verts[k].y;}centroidPt.x = GLfloat(xSum) / GLfloat(nVerts);centroidPt.y = GLfloat(ySum) / GLfloat(nVerts);wcPt2D pivPt, fixedPt;pivPt = centroidPt;fixedPt = centroidPt;GLfloat tx = 0.0, ty = 100.0;GLfloat sx = 0.5, sy = 0.5;GLdouble theta = pi / 2.0;glClear(GL_COLOR_BUFFER_BIT);glColor3f(0.0, 0.0, 1.0);triangle(verts);//三角形matrix3x3SetIdentity(matComposite);scale2D(sx, sy, fixedPt);//缩小transformVerts2D(nVerts, verts);glColor3f(1.0, 0.0, 0.0);triangle(verts);matrix3x3SetIdentity(matComposite);rotate2D(pivPt, theta);//旋转90transformVerts2D(nVerts, verts);glColor3f(1.0, 0.0, 0.0);triangle(verts);matrix3x3SetIdentity(matComposite);translate2D(tx, ty);//平移transformVerts2D(nVerts, verts);glColor3f(1.0, 0.0, 0.0);实验结果。