降维观测器示例
- 格式:doc
- 大小:95.50 KB
- 文档页数:2
机器学习案例三:数据降维与相关性分析(⽪尔逊(Pearson),⼆维相关性分析(TDC),。
在使⽤机器学习模型对数据进⾏训练的时候,需要考虑数据量和数据维度,在很多情况下并不是需要⼤量的数据和⼤量的数据维度,这样会造成机器学习模型运⾏慢,且消耗硬件设备。
除此之外,在数据维度较⼤的情况下,还存在”维度灾难“的问题。
在本篇博客⾥不对数据质量的判定,以及数据的增删做详细的介绍,只介绍对于数据的降维⽅法。
在开展特征⼯程时,数据的降维⽅法思想上有两种,⼀种是例如主成分分析⽅法(PCA)破坏数据原有的结构从⽽提取数据的主要特征,另⼀种是对数据进⾏相关性分析,按照⼀定的法则来对数据的属性进⾏取舍达到降维的⽬的。
在实际的⼯程问题中,由仪器设备采集到的数据具有很重要的意义,如果不是万不得已在进⾏建模的时候不建议破坏数据原有的结构,因为采集到的数据本⾝就具有很重要的物理意义与研究价值,提取出主要特征后会破坏原有数据的信息。
因此在篇中介绍在实际的⼯程应⽤中使⽤相关性分析⽅法进⾏数据的降维。
相关性分析⽅法主要考量的是两组数据之间的相关性,以⼀种指标来判定,看看数据中的哪些属性与⽬标数据的相关性较强,从⽽做出保留,哪些较弱,进⾏剔除。
相关性分析⽅法也分为线性相关性分析与⾮线性相关性分析两种,分别应⽤于不同的场合。
⼀、线性相关性分析 1.数据可视化⽅法: 数据可视化⽅法在某些情况下可以简单且直观的判定数据之间的相关性,但是⽆法很好的展现出数据之间的关系。
2.⽪尔逊相关性分析(Pearsion)(还有斯⽪尔曼,原理与⽪尔逊接近) ⽪尔逊相关性分析的数学公式如下: 求两变量x和y之间的相关性: 对于结果的分析与判断: 相关系数的绝对值越⼤,相关性越强:相关系数越接近于1或-1,相关性越强,相关系数越接近于0,相关度越弱。
通常情况下通过以下取值范围判断变量的相关强度: 相关系数 0.8-1.0 极强相关 0.6-0.8 强相关 0.4-0.6 中等程度相关 0.2-0.4 弱相关 0.0-0.2 极弱相关或⽆相关 对于x,y之间的相关系数r : 当r⼤于0⼩于1时表⽰x和y正相关关系 当r⼤于-1⼩于0时表⽰x和y负相关关系 当r=1时表⽰x和y完全正相关,r=-1表⽰x和y完全负相关 当r=0时表⽰x和y不相关 以上的分析是针对理论环境下,在实际的⼯程应⽤中也有学者发现且表明当相关性⼤于 0.2即代表存在相关性。

降维观测器示例【例9.48】给定系统1122210011x x u x x -⎡⎤⎡⎤⎡⎤⎡⎤=+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦⎣⎦,[]1210x y x ⎡⎤=⎢⎥⎣⎦设计此系统的降维观测器,使其极点配置在-5。
解 (1) 判定系统的可观测性 因为 1021C V CA ⎡⎤⎡⎤==⎢⎥⎢⎥-⎣⎦⎣⎦,0V ≠,因此系统可观测。
(2) 取非奇异线性变换矩阵为101011010Q -⎡⎤⎡⎤==⎢⎥⎢⎥⎣⎦⎣⎦利用x Qx =将给定系统化为1122101120x x u x x -⎡⎤⎡⎤⎡⎤⎡⎤=+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦⎣⎦,[]1201x y x ⎡⎤=⎢⎥⎣⎦待观测子系统的动态方程为1112222x x uz x x x y y=-+==+=+(3) 已知降维观测器的期望极点为-5,则其期望特征方程为50λ+=。
(4) 设观测器输出反馈系数为H ,降维观测器的特征方程为(1)10H H λλ---=++=(5) 对比(3)、(4)中的方程对应项系数,可得4H =。
(6) 实现先写出降维观测器的动态方程111ˆˆˆˆˆ(), xx u H z z z x =-+--= 应用本例(2)中的结果,上式可化为11ˆˆ548xx u y y =-+++ (9.222) ①变量变换法实现设1ˆ4xw y =+代入式(9.222),有 512w w u y =-+-其状态变量图如9.29所示。
图9.29变量变换法实现的降维状态观测器②结构变换法实现也可对式(9.222)直接应用结构变换法得降维观测器状态变量图如图9.30所示。
图9.30结构变换法实现的降维状态观测器1ˆxsw。

第五章 状态反馈和状态观测器3-5-1 已知系统结构图如图题3-5-1图所示。
(1)写出系统状态空间表达式;(2)试设计一个状态反馈矩阵,将闭环极点特征值配置在j 53±-上。
)(t y题3-5-1图【解】:方法一:根据系统结构直接设状态变量如题3-5-1图所示,写状态空间表达式:[]x y u x x 10112101=⎥⎦⎤⎢⎣⎡-+⎥⎦⎤⎢⎣⎡--= 23111=⎥⎦⎤⎢⎣⎡--=c c U rank U系统能控,可以设计状态反馈阵。
设状态反馈阵为][21k k K = 状态反馈控制规律为:Kx r u -= 求希望特征多项式:34625)3()(*22++=++=s s s s f求加入反馈后的系统特征多项式:)22()3()(1212k s k k s bK A sI s f ++-++=+-=依据极点配置的定义求反馈矩阵:]1316[131634)22(6)3(21112=⎩⎨⎧==⇒⎩⎨⎧=+=+-K k k k k k 方法二:[][][]1316)346(311110)(*10211=++⎥⎦⎤⎢⎣⎡--==--I A A A f U K c方法三:(若不考虑原受控对象的结构,仅从配置极点位置的角度出发)求系统传递函数写出能控标准型:2321)111()()(2++-=+-+=s s ss s s U s Y []xy u x x 10103210-=⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--= 求系统希望特征多项式:34625)3()(*22++=++=s s s s f求状态反馈矩阵K ~:[][][]33236234~21=--==k k K [][][][]5.05.031111010111=⎥⎦⎤⎢⎣⎡--==--Ab bP⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡=105.05.011A P P P []1316~==P K K依据系统传递函数写出能控标准型ss s s s s s U s Y 2310)2)(1(10)()(23++=++= []x y u x x 0010100320100010=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=求系统希望特征多项式:464]1)1)[(2()(*232+++=+++=s s s s s s f求状态反馈矩阵:[][][]144342604321=---==k k k K 。
降维观测器的应用场景
降维观测器是一种机器学习工具,可以将高维数据转换为低维数据,以便于分析和可视化。
以下是降维观测器的一些应用场景:
1. 图像和视频处理:降维观测器可以用于图像和视频的压缩和降噪,同时还可以提取出图像和视频中的关键特征。
2. 自然语言处理:降维观测器可以用于将文本数据转换为低维向量,以便于进行分类、聚类和文本相似度计算等任务。
3. 生物信息学:降维观测器可以用于处理基因表达数据和蛋白质结构数据,以便于发现基因和蛋白质之间的关系。
4. 金融分析:降维观测器可以用于处理股票价格数据和经济指标数据,以便于发现市场趋势和预测股票价格。
5. 物联网:降维观测器可以用于处理大量的传感器数据,以便于提取出关键特征并进行实时分析。
总之,降维观测器可以应用于各种领域的数据分析和处理中,能够帮助我们更好地理解和利用数据。
- 1 -。
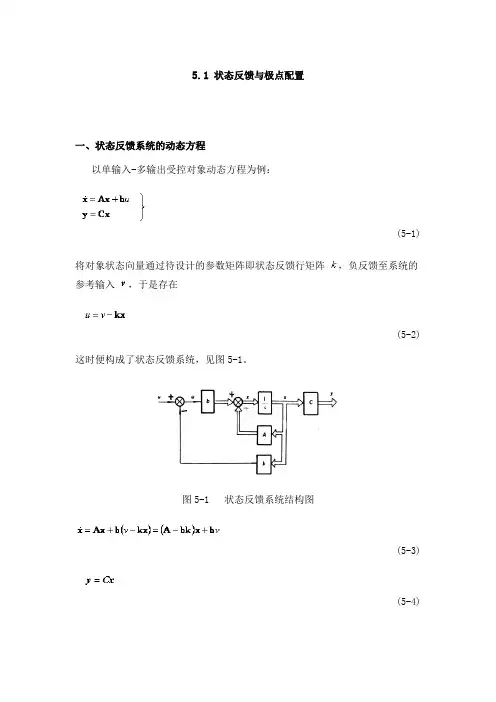
5.1状态反馈与极点配置一、状态反馈系统的动态方程以单输入-多输出受控对象动态方程为例:(5-1)将对象状态向量通过待设计的参数矩阵即状态反馈行矩阵,负反馈至系统的参考输入,于是存在(5-2)这时便构成了状态反馈系统,见图5-1。
图5-1 状态反馈系统结构图(5-3)(5-4)式中v为纯量,为维向量,为维矩阵,为维向量,为维行矩阵,为维向量,为维矩阵。
为闭环状态阵,为闭环特征多项式。
二、用状态反馈使闭环极点配置在任意位置上的充要条件是:受控对象能控证明若式(5-1)所示对象可控,定可通过变换化为能控标准形,有若在变换后的状态空间内引维状态反馈矩阵:(5-5)其中分别为由状态变量引出的反馈系数,则变换后的状态反馈系统动态方程为:(5-6)(5-7)式中(5-8)该式与仍为能控标准形,故引入状态反馈后,系统能控性不变。
特征方程为:(5-9)显见,任意选择阵的个元素,可使特征方程的个系数满足规定要求,能保证特征值(即闭环极点)任意配置。
将逆变换代入式(5-6),可求出原状态空间内的状态反馈系统状态方程:(5-10)与式(5-3)相比,式(5-10)所示对象应引入状态反馈阵为:(5-11)需指出,当受控对象可控时,若不具有能控标准形形式,并不必象如上证明那样去化为能控标准形,只要直接计算状态反馈系统闭环特征多项式,这时,其系数为的函数,与给定极点的特征多项式系数相比较,便可确定。
能控的多输入-多输出系统,经如上类似分析可知,实现闭环极点任意配置的状态反馈阵K为维。
若受控对象不稳定,只要有能控性,完全可由状态反馈配置极点使系统稳定。
状态变量受控情况下,引入状态反馈表示增加一条反馈通路,它能改变反馈所包围环节的传递特性,即通过改变局部回路的极点来改变闭环极点配置。
不能控状态变量与控制量无关,即使引入状态反馈,对闭环极点位置也不会产生任何影响,这是因为传递函数只与系统能控、能观测部分有关的缘故。
若不能控状态变量是稳定的状态变量,那么系统还是能稳定的,否则,系统不稳定。
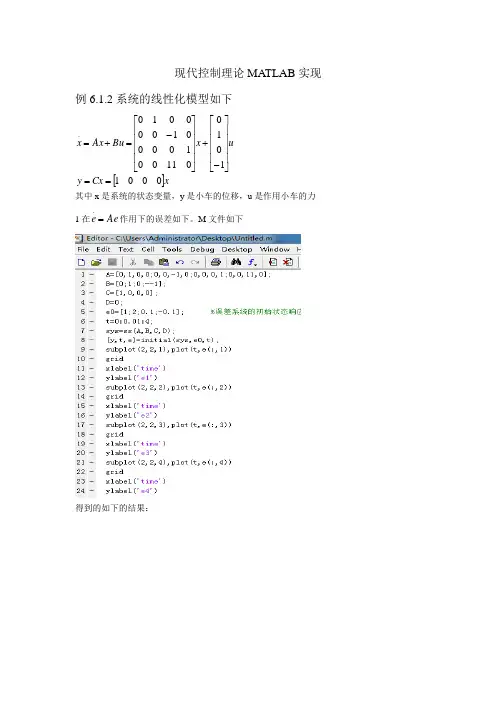
现代控制理论MATLAB 实现例6.1.2系统的线性化模型如下[]xCx y ux Bu Ax x 0001101001100100001000010.==⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=+=其中x 是系统的状态变量,y 是小车的位移,u 是作用小车的力 1在Ae e =.作用下的误差如下。
M 文件如下得到的如下的结果:设计一个状态观测器,使得观测器极点是10,10,322,3224321-=-=+-=+-=u u j u j u解 观测器模型如下Ly Bu x LC A x++-=~.)(~运行如下m 文件状态估计的误差状态方程为:e LC A e )(.-=以下进一步通过仿真来检验观测器的效果,取初始误差向量为[]Te 1.01.021)0(-=执行如下m 文件状态估计的误差曲线如下降维观测器的题:例6,3,2考虑系统Cxy Bu Ax x =+=.其中,[]001,100,6116100010=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=C B A 设计一个具有极点u1=-10,u2=-10,的降维的观测器。
因此降阶观测器的增益矩阵是L=[]T514,具有期望极点的降阶观测器为u y w w ⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--+⎥⎦⎤⎢⎣⎡---=10260191616114~.~跟踪控制器的设计例5.4.1已知被控对象的状态空间模型为[]xy u x x 21104310.=⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--= 设计状态反馈控制器,使得闭环极点为-4和-5,和跟踪控制器。
并讨论闭环系统的稳态性能。
可以知道能稳定跟踪先判断是否能稳定跟踪可以得到如下的结果00.511.522.530.20.40.60.811.21.4time(sec)O u t p u t最优控制的习题例7.2.2考虑以下状态空间模型的描述的系统:其中⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=100,92735100010B A系统的性能指标J 定义为 ⎰∞+=)(t T T d Ru u Qx x J其中,[]1,100010001=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=R Q 设计最优状态反馈控制器,并检验最优闭环系统对初始状态[]Tx 001)0(=的响应。
降维状态观测器的两种设计方法及算例
张文;齐晓慧
【期刊名称】《军械工程学院学报》
【年(卷),期】2005(017)003
【摘要】降维状态观测器是非常重要的一类观测器,它使采用状态反馈构成闭环系统的物理实现成为可能.降维状态观测器的设计方法很多,笔者在一种常用设计方法的基础上,推导出对应的另一种设计方法,这将使降维观测器设计考虑的情况更全面,为使用方便,针对这两种方法给出了算例.
【总页数】3页(P62-64)
【作者】张文;齐晓慧
【作者单位】镇江高等专科学校电子与信息系,江苏,镇江,212003;军械工程学院光学与电子工程系,河北,石家庄,050003
【正文语种】中文
【中图分类】TP273
【相关文献】
1.捷联惯导系统中卡尔曼滤波器的降维状态观测器设计 [J], 施闻明;徐彬;陈利敏
2.利用降维状态观测器离散系统的鲁棒容错控制 [J], 刘志东;刘丽华
3.基于降维状态观测器的最优拥塞控制研究 [J], 韩存武;刁奇常;舒瑞;毕松;刘蕾;庞中华
4.基于降维状态观测器的轮轨力估计方法研究 [J], 李洲;郑树彬;柴晓冬
5.时滞系统的降维状态预测观测器及预测控制器设计 [J], 唐功友
因版权原因,仅展示原文概要,查看原文内容请购买。

本文通过具体的例子阐明如何在 MATLAB系统中进行全维状态观测器和降维状态观测器的设计。
MATLAB 为状态空间设计提供了很多有用的函数,方便了矩阵方程的求解,其中的MATLAB里面提供的库函数对全维状态观测器和降维状态观测器的设计也显得非常地方便。
现通过例子说明如何用 MATLAB 设计状态观测器。
为了评价 MATLAB 所设计的状态观测器的性能,本文通过在 SIMULINK 环境下来仿真一个三阶状态观测器,来说明用 MATLAB 设计状态观测器的准确性。
1、全维观测器的设计已知三阶系统的状态空间方程为:首先检验系统的是否完全能观A=[2 -1 1;0 -1 2;1 0 -2];C=[2 1 0];N=[C;C*A;C*A*A]rank(N)rank(N)ans = 3 ,说明系统是完全能观的。
下面选择观测器需要配置的期望极点为:s1 =-12 s2,3 =-3±0.88i 由此求出观测器增益矩阵G:A=[2 -1 1;0 -1 2;1 0 -2];C=[2 1 0];P =[-12;-3+0.88*i;-3-0.88*i];G = acker(A',C',P);求得G = [11.6527 -6.3054 1.0619]可得全维观测器的方程为:下面可依据上式构建simulink图,据此观察观测器的跟踪能力:跟踪效果图如下:X1X2X3从图中可以看出状态观测器的状态X1,X2,X3 能够完全估计原三阶系统的状态。
如果原三阶系统和其状态观测器的初始状态不同,状态观测器的状态X1,X2,X3 不能同原三阶系统状态完全一致,但能很快跟踪原三阶系统状态(主要取决于状态观测器的响应速度,即状态观测器的极点配置。
)2、降维观测器设计从上面的全维观测器输出方程可以看出,此系统输出就等于第一个状态,因此该状态可以有输出求得,即变换矩阵P为单位阵,而降维观测器的阶次为2。
降维观测器的期望特征根选为-3±0.88i据此求观测器增益a22=[-1 1;0 -1];a12=[-2 -2];pe=[-3+1i*2*7^(1/2)/3;-3-1i*2*7^(1/2)/3];lt=acker(a22',a12',pe);l=lt'求得,得到引入中间变量得降维观测器的状态方程为下面可依据上式构建simulink图,据此观察观测器的跟踪能力X2X3从降维观测器仿真的输出图形中可以看出,系统状态变量X2、X3的跟踪能力比较理想。
状态观测器设计利用状态反馈实现闭环系统的极点配置,需要利用系统的全部状态变量。
然而系统的状态变量并不都是能够易于用物理方法量测出来的,有些根本就无法量测;甚至一些中间变量根本就没有常规的物理意义。
此种情况下要在工程上实现状态反馈,就需要对系统的状态进行估计,即构造状态观测器。
状态观测器,是一个在物理上可以实现的动态系统,它利用待观测系统的可以量测得到的输入和输出信息来估计待观测系统的状态变量,以便用该组状态变量的估计值来代替待观测系统的真实状态变量进行状态反馈设计,实现闭环系统极点的再配置。
1. 全维状态观测器当对象的所有状态均不可直接量测时,若要进行状态反馈设计,就需对全部状态变量进行观测。
这时构造的状态观测器,其阶次与对象的阶次相同,被称为全维状态观测器。
考虑如下n阶单输出线性定常离散系统(1)其中,A为n×n维系统矩阵,B为n×r输入矩阵,C为n×1维输出矩阵。
系统结构图如图1所示。
图1 全维状态观测器构造一个与受控系统具有相同参数的动态系统(2)当系统(1)与(2)的初始状态完全一致时,则两个系统未来任意时刻的状态也应完全相同。
但在实际实现时,不可能保证二者初始状态完全相同。
为此,应引入两个系统状态误差反馈信号构成状态误差闭环系统,通过极点配置使误差系统的状态渐趋于零。
由于原受控系统状态不可直接量测,故用二个系统的输出误差信号代替。
引入了输出误差的状态观测器状态方程为(3)其中,H为状态观测器的输出误差反馈系数矩阵,有如下形式定义状态估计误差为,用式(7.65)与(7.67)相减可得(4)即(5)通过式(5)可以看出,若选择合适的输出误差反馈矩阵H 使得状态估计误差系统(5)的所有极点均位于z平面单位圆内,则误差可在有限拍内趋于零,即状态估计值在有限拍内可以跟踪上真实状态,且极点越靠近原点状态估计误差趋于零的速度越快,反之越慢。
可见,能否逼近x(k)以及逼近速度是由H阵决定的。
状态观测器摘要观测器在控制理论中非常重要。
当状态不能观测时,应设计状态观测器来估计状态。
理论分析和数值仿真证实了用所设计的观测器来估计状态的有效性。
关键字:观测器;状态观测器;设计一 全维状态观测器的设计极点配置是基于状态反馈,因此状态X 必须可观测。
当状态不能观测时,则应设计状态观测器来估计状态。
x A x B u y C x =+⎧⎨=⎩(1) 若系统完全能观测,则可构造如图1所示的状态观测器。
由上图可得观测器的状态方程为ˆˆˆxA xB u LC x L y =+-+ (2) 即 ˆˆ x (A L C )x B u L y =-++ 其特征多项式为()()f s sI A L C =--由于工程上要求ˆ x能比较快速的逼近 x ,只要调整反 馈矩阵 L, 观测器的极点就可以 任意配置达到要求的性能。
假定单变量所要求的 n 个 观测器的极点为:123.................n λλλλ , 则可求出期望的状态观测器的特征方程为:112()( n n nn n f s s a s a λλλλλλ-=---=++这时可求得反馈矩阵 L 为:10()...1o o L f A V -⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦ (3) 式中1...o n C C A V C A -⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦是将系统期望的观测器特征方程中 S 换成系统矩阵 A后的矩阵多项式。
利用对偶原则, 可使设计问题大为简化, 求解过程如下:( 1)构造系统式( 1)的对偶系统T TT z A z C B z ηω⎧=+⎪⎨=⎪⎩ (4) ( 2)用MATLAB 的函数 p l ace ( )及 acker ( ), 根据下式可求得状态观测器的反馈矩阵Lk e r(,,)T T T L a c A C P =或(,,)T T TL p la c e A C P = (5) 其中, P 为给定的极点, L 为状态观测器的反馈矩阵。
降维观测器的应用场景
降维观测器是一种常用于数据处理和分析领域的工具,它可以将高维数据降至低维,
以便更好地理解和分析数据。
下面将介绍一些常见的降维观测器的应用场景。
1. 图像处理
在图像处理领域,降维观测器可以用来减少输入图像的维度,降低图像处理的难度。
例如,在面部识别中,使用PCA(主成分分析)对面部图像进行降维,可以让计算机更快地识别和比较面部特征,使面部识别技术更加准确可靠。
2. 生物信息学
降维观测器在生物信息学中也有广泛应用。
例如,在基因表达数据分析中,可以使用
多维缩放(MDS)或t-SNE(t分布随机邻域嵌入)等降维算法,将高维基因表达数据映射
到二维或三维空间,方便研究人员对基因表达数据进行可视化和分析。
3. 自然语言处理
在自然语言处理领域,降维观测器可以用来帮助测试和构建自然语言处理模型。
例如,在情感分析中,可以使用LSA(潜在语义分析)对文本数据进行降维和特征提取,以便更好地理解文本的情感和意图。
4. 金融分析
在金融分析领域,降维观测器被用来分析金融市场和投资组合。
例如,在投资组合优
化中,可以使用PCA或因子分析等降维算法,将高维投资组合数据映射到低维空间,以便
更好地理解投资组合的风险和回报等特征。
5. 信号处理
总之,降维观测器已经成为了数据科学领域中不可或缺的工具之一。
无论是在图像处理、生物信息学、自然语言处理、金融分析还是信号处理等领域,降维观测器都有着广泛
的应用。
通过降维观测器的帮助,可以更好地理解和分析数据,提高数据的效率和准确
性。
降维观测器示例
【例】给定系统
1122210011x x u x x -⎡⎤⎡⎤⎡⎤⎡⎤=+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦⎣⎦&&,[]1210x y x ⎡⎤=⎢⎥⎣⎦
设计此系统的降维观测器,使其极点配置在-5。
解 (1) 判定系统的可观测性
因为 1021C V CA ⎡⎤⎡⎤==⎢⎥⎢⎥-⎣⎦⎣⎦,0V ≠,因此系统可观测。
(2) 取非奇异线性变换矩阵为
101011010Q -⎡⎤⎡⎤==⎢⎥⎢⎥⎣⎦⎣⎦ 利用x Qx =将给定系统化为
1122101120x x u x x -⎡⎤⎡⎤⎡⎤⎡⎤=+⎢⎥⎢⎥⎢⎥⎢⎥-⎣
⎦⎣⎦⎣⎦⎣⎦&&,[]1201x y x ⎡⎤=⎢⎥⎣⎦ 待观测子系统的动态方程为
1112222x x u z x x x y y
=-+==+=+&&& (3) 已知降维观测器的期望极点为-5,则其期望特征方程为50λ+=。
(4) 设观测器输出反馈系数为H ,降维观测器的特征方程为
(1)10H H λλ---=++=
(5) 对比(3)、(4)中的方程对应项系数,可得4H =。
(6) 实现
先写出降维观测器的动态方程
111ˆˆˆˆˆ(), x
x u H z z z x =-+--=& 应用本例(2)中的结果,上式可化为
11ˆˆ548x
x u y y =-+++&& ①变量变换法实现 设1ˆ4x
w y =+代入式,有 512w
w u y =-+-& 其状态变量图如所示。
图变量变换法实现的降维状态观测器
②结构变换法实现
也可对式直接应用结构变换法得降维观测器状态变量图如图所示。
图结构变换法实现的降维状态观测器。