旋转变压器基础知识
- 格式:doc
- 大小:378.00 KB
- 文档页数:8
旋转变压器基础知识旋转变压器是一种输出电压随转子转角变化的信号元件。
当励磁绕组以一定频率的交流电压励磁时,输出绕组的电压幅值与转子转角成正弦、余弦函数关系,或保持某一比例关系,或在一定转角范围内与转角成线性关系。
它主要用于坐标变换、三角运算和角度数据传输,也可以作为两相移相器用在角度--数字转换装置中。
按输出电压与转子转角间的函数关系,我所目前主要生产以下三大类旋转变压器:1. 正--余弦旋转变压器(XZ )----其输出电压与转子转角的函数关系成正弦或余弦函数关系。
2. 线性旋转变压器(XX )、(XDX )----其输出电压与转子转角成线性函数关系。
线性旋转变压器按转子结构又分成隐极式和凸极式两种,前者(XX )实际上也是正--余弦旋转变压器,不同的是采用了特定的变比和接线方式。
后者(XDX )称单绕组线性旋转变压器。
3. 比例式旋转变压器(XL )----其输出电压与转角成比例关系。
二、旋转变压器的工作原理由于旋转变压器在结构上保证了其定子和转子(旋转一周)之间空气间隙内磁通分布符合正弦规律,因此,当激磁电压加到定子绕组时,通过电磁耦合,转子绕组便产生感应电势。
图4-3为两极旋转变压器电气工作原理图。
图中Z 为阻抗。
设加在定子绕组的激磁电压为sin ω=- Sm V V t (4—1)图 4-3 两极旋转变压器根据电磁学原理,转子绕组12B B 中的感应电势则为sin sin sin θθω== (4-2)B s m V KV KV t (4—2)式中K ——旋转变压器的变化;—的幅值m s V V ;θ——转子的转角,当转子和定子的磁轴垂直时,θ=0。
如果转子安装在机床丝杠上,定子安装在机床底座上,则θ角代表的是丝杠转过的角度,它间接反映了机床工作台的位移。
由式(4-2)可知,转子绕组中的感应电势B V 为以角速度ω随时间t变化的交变电压信号。
其幅值sin θm KV 随转子和定子的相对角位移θ以正弦函数变化。
复习:1、感应同步器的结构和原理应用
2、感应同步器的应用
9.3 旋转变压器及其应用
9.3.1 旋转变压器的结构与工作原理
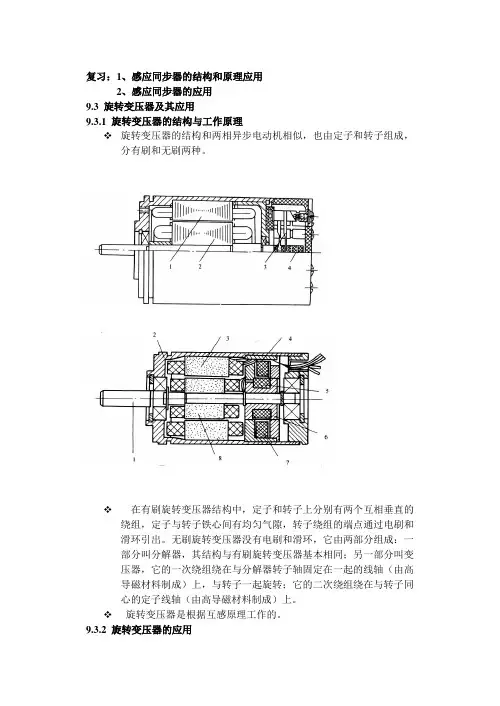
旋转变压器的结构和两相异步电动机相似,也由定子和转子组成,分有刷和无刷两种。
在有刷旋转变压器结构中,定子和转子上分别有两个互相垂直的绕组,定子与转子铁心间有均匀气隙,转子绕组的端点通过电刷和
滑环引出。
无刷旋转变压器没有电刷和滑环,它由两部分组成:一
部分叫分解器,其结构与有刷旋转变压器基本相同;另一部分叫变
压器,它的一次绕组绕在与分解器转子轴固定在一起的线轴(由高
导磁材料制成)上,与转子一起旋转;它的二次绕组绕在与转子同
心的定子线轴(由高导磁材料制成)上。
旋转变压器是根据互感原理工作的。
9.3.2 旋转变压器的应用
利用旋转变压器作位置检测元件时,常采用鉴相工作方式,下面介绍它在数控机床相位伺服系统(闭环及半闭环伺服系统中的一种)
中的应用。
小结:1、旋转变压器的结构与工作原理
2、旋转变压器的应用
作业:7、8。
旋转变压器是一种输出电压随转子转角变化的信号元件。
当励磁绕组以一定频率的交流电压励磁时,输出绕组的电压幅值与转子转角成正弦、余弦函数关系,或保持某一比例关系,或在一定转角范围内与转角成线性关系。
它主要用于坐标变换、三角运算和角度数据传输,也可以作为两相移相器用在角度--数字转换装置中。
按输出电压与转子转角间的函数关系,我所目前主要生产以下三大类旋转变压器: 1. 正--余弦旋转变压器(XZ )----其输出电压与转子转角的函数关系成正弦或余弦函数关系。
2. 线性旋转变压器(XX )、(XDX )----其输出电压与转子转角成线性函数关系。
线性旋转变压器按转子结构又分成隐极式和凸极式两种,前者(XX )实际上也是正--余弦旋转变压器,不同的是采用了特定的变比和接线方式。
后者(XDX )称单绕组线性旋转变压器。
3. 比例式旋转变压器(XL )----其输出电压与转角成比例关系。
二、 旋转变压器的工作原理由于旋转变压器在结构上保证了其定子和转子(旋转一周)之间空气间隙内磁通分布符合正弦规律,因此,当激磁电压加到定子绕组时,通过电磁耦合,转子绕组便产生感应电势。
图4-3为两极旋转变压器电气工作原理图。
图中Z 为阻抗。
设加在定子绕组的激磁电压为sin ω=- Sm V V t (4—1)图 4-3 两极旋转变压器 根据电磁学原理,转子绕组12B B 中的感应电势则为sin sin sin θθω== (4-2)B s m V KV KV t (4—2)式中K ——旋转变压器的变化;—的幅值ms V V ; θ——转子的转角,当转子和定子的磁轴垂直时,θ=0。
如果转子安装在机床丝杠上,定子安装在机床底座上,则θ角代表的是丝杠转过的角度,它间接反映了机床工作台的位移。
由式(4-2)可知,转子绕组中的感应电势B V 为以角速度ω随时间t变化的交变电压信号。
其幅值sin θm KV 随转子和定子的相对角位移θ以正弦函数变化。
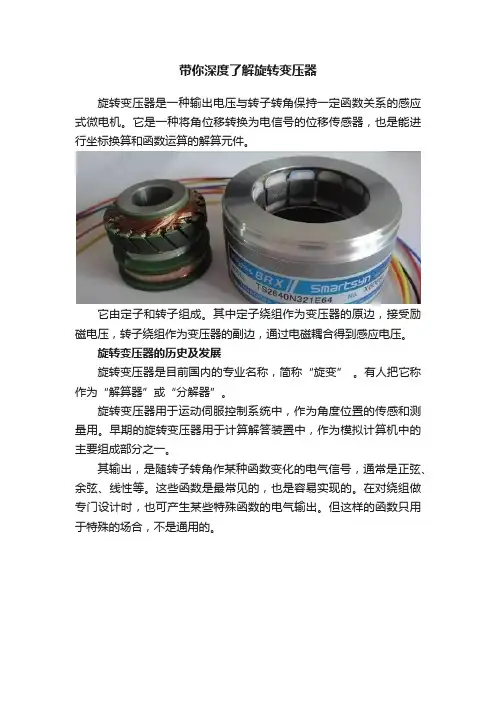
带你深度了解旋转变压器旋转变压器是一种输出电压与转子转角保持一定函数关系的感应式微电机。
它是一种将角位移转换为电信号的位移传感器,也是能进行坐标换算和函数运算的解算元件。
它由定子和转子组成。
其中定子绕组作为变压器的原边,接受励磁电压,转子绕组作为变压器的副边,通过电磁耦合得到感应电压。
旋转变压器的历史及发展旋转变压器是目前国内的专业名称,简称“旋变” 。
有人把它称作为“解算器”或“分解器”。
旋转变压器用于运动伺服控制系统中,作为角度位置的传感和测量用。
早期的旋转变压器用于计算解答装置中,作为模拟计算机中的主要组成部分之一。
其输出,是随转子转角作某种函数变化的电气信号,通常是正弦、余弦、线性等。
这些函数是最常见的,也是容易实现的。
在对绕组做专门设计时,也可产生某些特殊函数的电气输出。
但这样的函数只用于特殊的场合,不是通用的。
60年代起,旋转变压器逐渐用于伺服系统,作为角度信号的产生和检测元件。
三线的三相的自整角机,早于四线的两相旋转变压器应用于系统中。
所以作为角度信号传输的旋转变压器,有时被称作四线自整角机。
随着电子技术和数字计算技术的发展,数字式计算机早已代替了模拟式计算机。
所以实际上,旋转变压器目前主要是用于角度位置伺服控制系统中。
由于两相的旋转变压器比自整角机更容易提高精度,所以旋转变压器应用的更广泛。
特别是,在高精度的双通道、双速系统中,广泛应用的多极电气元件,原来采用的是多极自整角机,现在基本上都是采用多极旋转变压器。
早期的旋转变压器,由于信号处理电路比较复杂,价格比较贵的原因,应用受到了限制。
但因为旋转变压器具有无可比拟的可靠性,以及具有足够高的精度,在许多场合有着不可代替的地位,特别是在军事以及航天、航空、航海等方面。
随着电子工业的发展,电子元器件集成化程度的提高,元器件的价格大大下降;另外,信号处理技术的进步,旋转变压器的信号处理电路变得简单、可靠,价格也大大下降。
而且,又出现了软件解码的信号处理,使得信号处理问题变得更加灵活、方便。
微特电机第四章旋转变压器第一节引言旋转变压器是一种通过转动来改变电压的装置。
它由一个主要线圈和一个次要线圈组成,两个线圈都绕在同一个铁心上。
旋转变压器通过改变主要线圈和次要线圈之间的耦合来改变输出电压。
本节将介绍旋转变压器的工作原理、结构特点以及应用领域。
第二节工作原理旋转变压器的工作原理基于电磁感应。
当通过主要线圈通电时,它会产生一个磁场,由于主要线圈绕在一个铁心上,这个磁场会传导到铁心中。
同时,由于铁心、主要线圈和次要线圈之间的耦合,磁场也会传导到次要线圈中。
当次要线圈中有负载时,通过电磁感应,磁场会产生感应电动势,进而在次要线圈中产生电流。
该电流的大小取决于主要线圈中的电流和主要线圈与次要线圈之间的耦合系数。
因此,通过改变主要线圈的电流和耦合系数,就可以改变输出电压。
第三节结构特点1.铁心:旋转变压器采用铁心的设计,主要是为了提高磁场的传导效率。
铁心的材料通常是磁导率较高的材料,如硅钢片。
2.主要线圈:主要线圈是通电的线圈,它产生一个磁场,通过铁心传导到次要线圈中。
3.次要线圈:次要线圈是负载所接的线圈,当主要线圈中有电流时,通过电磁感应,次要线圈中就会产生电流。
4.旋转机构:旋转变压器具有一个旋转机构,可以通过旋转机构来改变主要线圈和次要线圈之间的耦合系数。
第四节应用领域旋转变压器可以应用在许多领域。
以下是一些常见的应用领域:1.变压器调节器:旋转变压器可以用作变压器调节器,通过改变电压来控制设备的性能。
2.电动机:旋转变压器可以用作电动机,通过改变电压来控制电动机的转速。
3.变频器:旋转变压器可以用作变频器,通过改变电压来改变交流电的频率。
4.电源:旋转变压器可以用作电源,通过改变电压来提供给不同电气设备所需的电力。
总结旋转变压器是一种通过转动来改变电压的装置。
它通过电磁感应原理,通过主要线圈和次要线圈之间的耦合来改变输出电压。
旋转变压器具有铁心、主要线圈、次要线圈和旋转机构等结构特点,可以应用在变压器调节器、电动机、变频器和电源等领域。
旋转变压器就是一种输出电压随转子转角变化得信号元件。
当励磁绕组以一定频率得交流电压励磁时,输出绕组得电压幅值与转子转角成正弦、余弦函数关系,或保持某一比例关系,或在一定转角范围内与转角成线性关系。
它主要用于坐标变换、三角运算与角度数据传输,也可以作为两相移相器用在角度--数字转换装置中。
按输出电压与转子转角间得函数关系,我所目前主要生产以下三大类旋转变压器:1. 正--余弦旋转变压器(XZ)----其输出电压与转子转角得函数关系成正弦或余弦函数关系。
2. 线性旋转变压器(XX)、(XDX)----其输出电压与转子转角成线性函数关系。
线性旋转变压器按转子结构又分成隐极式与凸极式两种,前者(XX)实际上也就是正--余弦旋转变压器,不同得就是采用了特定得变比与接线方式。
后者(XDX)称单绕组线性旋转变压器。
3. 比例式旋转变压器(XL)----其输出电压与转角成比例关系。
二、 旋转变压器得工作原理由于旋转变压器在结构上保证了其定子与转子(旋转一周)之间空气间隙内磁通分布符合正弦规律,因此,当激磁电压加到定子绕组时,通过电磁耦合,转子绕组便产生感应电势。
图4-3为两极旋转变压器电气工作原理图。
图中Z 为阻抗。
设加在定子绕组得激磁电压为 sin ω=- S m V V t (4—1) 图 4-3 两极旋转变压器 根据电磁学原理,转子绕组12B B 中得感应电势则为sin sin sin θθω== (4-2)B s m V KV KV t (4—2)式中K ——旋转变压器得变化;—的幅值m s V V ;θ——转子得转角,当转子与定子得磁轴垂直时,θ=0。
如果转子安装在机床丝杠上,定子安装在机床底座上,则θ角代表得就是丝杠转过得角度,它间接反映了机床工作台得位移。
由式(4-2)可知,转子绕组中得感应电势B V 为以角速度ω随时间t变化得交变电压信号。
其幅值sin θm KV 随转子与定子得相对角位移θ以正弦函数变化。
旋转变压器是一种输出电压随转子转角变化的信号元件。
当励磁绕组以一定频率的交流电压励磁时,输出绕组的电压幅值与转子转角成正弦、余弦函数关系,或保持某一比例关系,或在一定转角范围内与转角成线性关系。
它主要用于坐标变换、三角运算和角度数据传输,也可以作为两相移相器用在角度--数字转换装置中。
按输出电压与转子转角间的函数关系,我所目前主要生产以下三大类旋转变压器:1. 正--余弦旋转变压器(XZ )----其输出电压与转子转角的函数关系成正弦或余弦函数关系。
2. 线性旋转变压器(XX )、(XDX )----其输出电压与转子转角成线性函数关系。
线性旋转变压器按转子结构又分成隐极式和凸极式两种,前者(XX )实际上也是正--余弦旋转变压器,不同的是采用了特定的变比和接线方式。
后者(XDX )称单绕组线性旋转变压器。
3. 比例式旋转变压器(XL )----其输出电压与转角成比例关系。
二、 旋转变压器的工作原理由于旋转变压器在结构上保证了其定子和转子(旋转一周)之间空气间隙内磁通分布符合正弦规律,因此,当激磁电压加到定子绕组时,通过电磁耦合,转子绕组便产生感应电势。
图4-3为两极旋转变压器电气工作原理图。
图中Z 为阻抗。
设加在定子绕组的激磁电压为sin ω=- S m V V t (4—1)图 4-3 两极旋转变压器根据电磁学原理,转子绕组12B B 中的感应电势则为sin sin sin θθω== (4-2)B s m V KV KV t (4—2)式中K ——旋转变压器的变化;—的幅值ms V V ; θ——转子的转角,当转子和定子的磁轴垂直时,θ=0。
如果转子安装在机床丝杠上,定子安装在机床底座上,则θ角代表的是丝杠转过的角度,它间接反映了机床工作台的位移。
由式(4-2)可知,转子绕组中的感应电势B V 为以角速度ω随时间t 变化的交变电压信号。
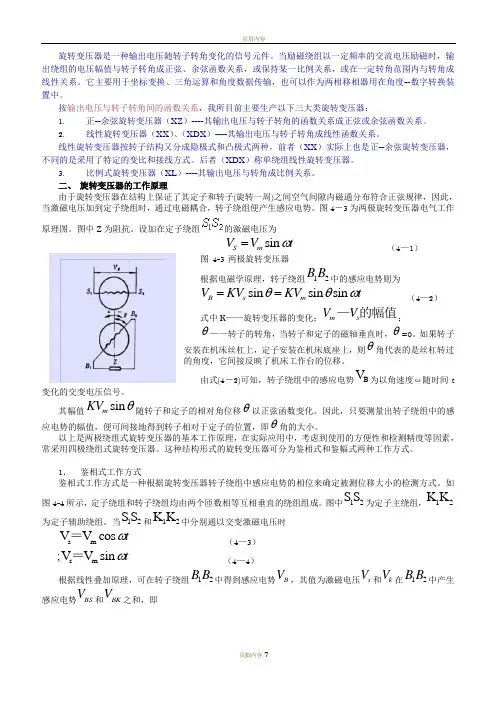
其幅值sin θm KV 随转子和定子的相对角位移θ以正弦函数变化。
因此,只要测量出转子绕组中的感应电势的幅值,便可间接地得到转子相对于定子的位置,即θ角的大小。
以上是两极绕组式旋转变压器的基本工作原理,在实际应用中,考虑到使用的方便性和检测精度等因素,常采用四极绕组式旋转变压器。
这种结构形式的旋转变压器可分为鉴相式和鉴幅式两种工作方式。
1.鉴相式工作方式鉴相式工作方式是一种根据旋转变压器转子绕组中感应电势的相位来确定被测位移大小的检测方式。
如图4-4所示,定子绕组和转子绕组均由两个匝数相等互相垂直的绕组组成。
图中12S S 为定子主绕组,12K K 为定子辅助绕组。
当12S S 和12K K 中分别通以交变激磁电压时s m V V cos (43);V V sin (44)ωω--= = t t (4—3)s m (43);V V sin (44)ω-- = t t (4—4)根据线性叠加原理,可在转子绕组12B B 中得到感应电势B V ,其值为激磁电压s V 和k V 在12B B 中产生感应电势BS V 和BK V 之和,即m m m sin()cos V cos sin V sin cos V sin()θθωθωθωθ=+=-+=-+-= (4-5) B BS BK s k V V V KV KV K t K t K t (4—5)m m sin()cos V cos sin V sin cos V sin()θθωθωθωθ=+=-+=-+-= (4-5) B BS BKs k V V V KV KV K t K t K t图 4-4 旋转变压器电气工作原理由式(4—4)和(4—5)可见,旋转变压器转子绕组中的感应电势B V 与定子绕组中的激磁电压同频率,但相位不同,其差值为θ。
而θ角正是被测位移,故通过比较感应电势B V 与定子激磁电压信号k V 的相位,便可求出θ。
在图4—4中,转子绕组12A A接一高阻抗,它不作为旋转变压器的测量输出,主要起平衡磁场的作用,目的是为了提高测量精度。
2.鉴幅式工作方式鉴幅式工作方式是通过对旋转变压器转子绕组中感应电势幅值的检测来实现位移检测的。
其工作原理如下: 参看图4-4,设定子主绕组12S S 和辅助绕组12K K 分别输入交变激磁电压s m V V cos sin (46);V V sin sin (47)αωαω--= = t t (4—6)s m (46);V V sin sin (47)αω-- = t (4—7) 式中m V cos α和m V sin α分别为激磁电压S V 和k V 的幅值。
α角可以改变,称其为旋转变压器的电气角。
根据线性叠加原理,得出转子绕组12B B 中的感应电势B V 如下: m m m sin()cos V cos sin sin V sin sin cos V sin()sin (48)θθαωθαωθαθω=+=-+=-+--= B BS BK s k V V V KV KV K t K t K t m sin()cos V cos sin sin V sin sin cos V sin()sin (48)θθαωθαωθαθω=+=-+=-+--= B BS BK s k V V V KV KV K t K t K t (4—8)由式(4-8)可以看出,感应电势B V 是幅值为m V sin()αθ-K 的交变电压信号,我们只要逐渐改变α值,使B V 的幅值等于零,这时,因m V sin()0αθ-= (4-9)K (4—9)故可得 : θ=α (4—10)α值就是被测角位移θ的大小。
由于α是我们通过对它的逐渐改变,实现使B V 幅值等于零的,其值自然是应该知道的。
三、 旋转变压器的应用在旋转变压器的鉴相式工作方式中,感应信号和激磁信号Vk 之间的相位差θ角,可通过专用的鉴相器线路检测出来并表示成相应的电压信号,设为U(θ),通过测量该电压信号,便可间接地求得θ值。
但由于是关于θ的周期性函数,U(θ)是通过比较和Vk 之值获得的,因而它也是关于θ的周期性函数,即U(θ)=U(n ×2π+θ) (n=1,2,3,…) (4—9)故在实际应用中,不但要测出U(θ)的大小,而且还要测出U(θ)的周期性变化次数n ,或者将被测角位移θ角限制在±π之内。
在旋转变压器的鉴幅式工作方式中,的幅值设为m,由式(4--8)可知(4—10)它也是关于θ的周期性函数,在实际应用中,同样需要将θ角限制在±π之内。
在这种情况下,若规定和限制α角只能在[-π,π]内取值,利用式(4-10),便可唯一地确定出θ之值。
否则,如θ=3π/2(>π),这时,α=3π/2和α=-π/2都可使m,从而使θ角不能唯一地确定,造成检测结果错误。
由上述知,无论是旋转变压器的鉴相式工作方式,还是鉴幅式工作方式,都需要将被测角位移θ角限定在±π之内,只要θ在±π之内,就能够被正确地检测出来。
事实上,对于被测角位移大于π或小于-π的情况,如用旋转变压器检测机床丝杠转角的情况,尽管总的机床丝杠转角θ可能很大,远远超出限定的±π范围,但却是机床丝杠转过的若干次小角度θi之和,即(4—11)而θi很小,在数控机床上一般不超过3°,符合-π≤θi≤π的要求,旋转变压器及其信号处理线路可以及时地将它们一一检测出来,并将结果输出。
因此,这种检测方式属于动态跟随检测和增量式检测。
基于旋转变压器的永磁同步电机高精度位置检测系统永磁同步电动机控制系统的关键技术之一是转子位置的检测,只有检测出转子实际空间位置(绝对位置)后,控制系统才能决定变频器的通电方式、控制模式及输出电流的频率和相位,以保证永磁同步电动机的正常工作。
因此在采用转子磁场定向控制方式的永磁同步电机控制系统中,转子位置的精确可靠检测是实现矢量控制技术的关键。
在常用的光栅编码器、霍尔传感器和旋转变压器等转子位置传感器中,旋转变压器具有耐高温、耐湿度、抗冲击性好、抗干扰能力强等突出优点,从而可以精确可靠的产生转子绝对位置信息,因此适用于永磁同步电机数字控制系统,满足其应用系统高性能、高可靠性的要求。
本文提及的永磁同步电机控制系统使用日本多摩川公司的正余弦转变压器检测电机转子的位置,采用新型的旋转变压器/数字转换器ad2s80a将旋转变压器输出的模拟信号转换为数字信号。
分析了ad2s80a的工作原理,设计了位置信号检测电路,并给出了与数字信号处理器tms320lf2407a的spi通讯接口方法及程序示例。
旋转变压器的基本原理旋转变压器(简称旋变)是一种输出电压随转子转角变化的信号元件。
当励磁绕组以一定频率的交流电压励磁时,输出绕组的电压幅值与转子转角成正、余弦函数关系,这种旋转变压器又称为正余弦旋转变压器。
在电机控制系统中,用于测量位置信息的旋转变主要是正余弦旋转变压器。
本系统中所采用的是日本多摩川公司的正余弦旋转变压器。
这种旋变由转子和定子绕组构成,并且两者相互独立,一次和二次极线圈都绕在定子上,转子由两组相差90°线圈组成,采用无刷设计。
图1是其电气示意图。
图1 旋转变压器电气示意图旋变的输入输出电压之间的具体函数关系如下所示:设转子转动角度为θ,初级线圈电压(即励磁电压)为: er1-r2=esin2πft式中f——励磁频率;e——信号幅度。
那么输出电压:es1-s3=kesin2πftcosθes2-s4=kesin2πftsinθ式中k——传输比;θ——转子偏离原点的角度。
令θ=ωt,即转子做匀速运动,那么其输出信号的函数曲线可表示为图2所示。
图2 旋转变压器输入输出波形图2中,输出的电压包络信号为为sinωt和cosωt,数字转换器就是通过检测这两组输出信号获取旋变位置信息的。
位置检测转换电路设计[1-2]ad2s80a芯片简介ad2s80a是ad公司的rdc芯片ad2s80系列的一种,具有精度可调、可靠性高、状态和控制信号数字化、易与微控制器dsp相连等优点,可用于自整角机、旋转变压器、感应同步器的数字转换。
其封装形式有40管脚的dip和44管脚的lcc方形两种。
ad2s80a的分辨率有10、12、14、16bit几种可选,可由引脚sc1和sc2的逻辑状态来决定。
通过选择不同的外接电阻和电容,可得到不同的带宽和跟踪速率。
ad2s80a转换电路的设计由旋转变压器的原理可知,要使旋转变压器正常工作,在其转子端必须施加一个正弦激励。
本系统中正弦激磁信号由intersil公司的icl8038芯片产生,根据永磁同步电动机控制系统的实际情况,激磁信号选取为10khz的正弦波(即ad2s80a的参考频率),ad2s80a的分辨率选为16bit,最大跟踪速度为16.25r/s,带宽为600hz。