基于降维观测器的超精密车床振动控制
- 格式:doc
- 大小:293.32 KB
- 文档页数:7
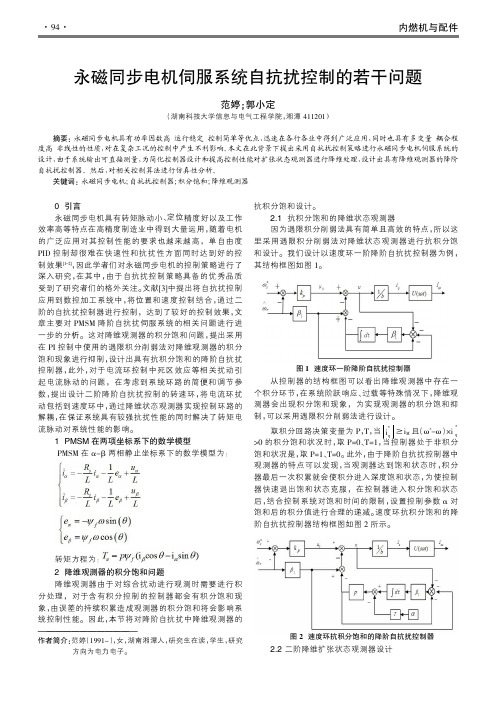
PMSM在α-β两相静止坐标系下的数学模型为:转矩方程为:2降维观测器的积分饱和问题从控制器的结构框图可以看出降维观测器中存在一个积分环节,在系统阶跃响应、过载等特殊情况下,降维观测器会出现积分饱和现象,为实现观测器的积分饱和抑制,可以采用遇限积分削弱法进行设计。
取积分回路决策变量为P,T,当i*q⩾i M且(ω*-ω)×i >0的积分饱和状况时,取P=0、T=1,当控制器处于非积分饱和状况是,取P=1、T=0。
此外,由于降阶自抗扰控制器中观测器的特点可以发现,当观测器达到饱和状态时,积分2.2二阶降维扩张状态观测器设计图1速度环一阶降阶自抗扰控制器图2速度环抗积分饱和的降阶自抗扰控制器定义机械角速度为用状态方程可以表示为:当速度信号可以测量的情况下,可以通过构建降维观测器去估计,通过去观测估计,降维状态观测器可以进行如下设计。
其中观测器增益选取为。
3算法仿真实验和分析降阶自抗扰控制器的抗积分饱和实验:实验采用从图3可以看出,在给定速度3000RPM/Min速度只能跟随到2500RPM/Min的幅值速度,当速度给定1000RPM/Min时,含有抗积分饱和的降阶自抗扰控制器能够快速跟随,而不含抗积分饱和的降阶自抗扰控制器由于积分进入深度饱和状态,无法退出积分饱和状态,控制器不具备调节能力,此种情况造成系统对于异常工况的适应能力差,使控制性能不佳。
从图4中可以发现,采用二阶速度环降阶自抗扰控制器相对于PI控制具有更好的速度响应性能和抗扰性能,因为它能够将负载扰动、电机参数扰动及死区效应扰动等通过降维状态观测器进行完全解耦后补偿到控制环路中,使系统能够对扰动有更好的响应性,获得更好的抗扰性能,速度、电流环控制采用一个控制器进行控制简化了控制结构,同时因控制器未采用积分控制所以系统具有更快的响应性能。
但此种控制也存在不足之处,因采用降维观图3饱和状态转速响应曲线图4二阶速度环降阶自抗扰控制速度响应曲线。
现代操纵理论基础上机实验报告之一基于降维观测器的超周密车床振动操纵院系自动操纵原理课程设计专业航天学院自动化专业姓名班级学号指导教师强盛哈尔滨工业大学2021年6月16日一:降维观测器设计的工程背景简介在实验一中针对亚微米超周密车床的振动操纵系统,咱们采纳全状态反馈法设计了操纵规律。
可是在工程实践中,传感器一样只能测量基座和床身的位移信号,不能测量它们的速度及加速度信号,因尔后两个状态变量不能取得,换句话说全状态反馈很难真正实现。
为了解决那个问题,本实验设计一个降维(2维)状态观测器,用来解决状态变量 2x 、3x 的估量问题,从而真正实现全状态反馈操纵。
二:实验目的通过本次上机实验,使同窗们熟练把握:降维状态观测器的概念及设计原理;线性系统分离原理的内涵;进一步熟悉极点配置及状态反馈操纵律的设计进程;MATLAB 语言的应用三:闭环系统的性能指标要求闭环系统渐近稳固;降维观测器渐近稳固。
四:实际给定参数假设某一亚微米超周密车床隔振系统的各个参数为:01200N /m k =980N /A e k = kg 120=m 2.0=c Ω300=R H 95.0=L五:操纵系统的开环状态空间模型u x x x x x x⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡1008.3155.109.3157100010321.3.2.1[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=321006.8x x x y 六:降维观测器方程的推导进程设⎥⎦⎤⎢⎣⎡=21l l L ,那么带入1222LA A -可得: ⎥⎦⎤⎢⎣⎡----=-8.3155.101211222l l LA A211212225.108.315)8.315(l l l LA A I +++++=+-λλλ (1) 将降维观测器极点配置在-180,-180,那么:32400360)'(2++=λλλf(2)(1)式与(2)式对应项系数相等,即: ⎩⎨⎧=++=+324005.108.3153608.315211l l l (3) 解(3)求得:⎩⎨⎧==14.184312.4421l l易知:u B y L x LA A x 21222)('++-=(4)将L 带入(4)式得:u y x x ⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡---=1014.184312.44'8.31564.1844112.44'令:⎩⎨⎧-=-=Ly x z y L x z ''(5) 将(5)带入(4)式,可得:u x z ⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡---=108.31564.1844112.44u y z ⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡-+⎥⎦⎤⎢⎣⎡---=105.66356745.164778.31564.1844112.44七:基于降维观测器的状态反馈操纵律设计依如实验1已得出状态反馈操纵律为3218.1975.19341.11342x x x u +--=(6) 此刻应当改成'8.197'5.19341.11342321x x x u +--=)14.18431(8.197)2.44(5.19341.1134212111x z x z x +++--=121492.35488328.1975.1934x z z ++-=至此,整个闭环系统的方程能够写为:)492.35488328.1975.1934(1008.3155.109.3157100010121321.3.2.1x z z x x x x x x ++-⨯⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡)492.35488328.1975.1934(105.66356745.164778.31564.1844112.44121x z z y z z ++-⨯⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡-+⎥⎦⎤⎢⎣⎡---=八:闭环系统数字仿真给定初始条件:51(0)610m x -=⨯,52(0)210m/s x -=⨯,523(0)0.810m/s x -=-⨯,21(0) 1.810z -=⨯,2(0)6z =。
![一种基于扰动观测器的机械数控机床自身振动抑制方法[发明专利]](https://img.taocdn.com/s1/m/025577f010a6f524cdbf85a2.png)
专利名称:一种基于扰动观测器的机械数控机床自身振动抑制方法
专利类型:发明专利
发明人:顾贤,马继光,刘鹏,朱慧江
申请号:CN202011522472.5
申请日:20201221
公开号:CN112701978A
公开日:
20210423
专利内容由知识产权出版社提供
摘要:本发明提出的一种基于扰动观测器的机械数控机床振动抑制控制方法,首先,永磁同步伺服电机驱动机床某部件后,通过给定转速ω和编码器采集的电机实际转速ω,得到q轴电流的参考值i 并给定d轴电流参考为0;再分别通过编码器和电流传感器得到的电角度θ与电机的三相定子电流i(k),从而计算得到q轴的定子电流分量i(k),进而可计算电机转矩T;确定选取的名义模型G()和低通滤波器G()结构,计算扭转力矩估计值T;再将其与经过低通滤波器之后的电机转矩输入减法器,得到力矩观测值T;从而将观测值经过负反馈,进行力矩补偿,达到调节系统的等效惯量,以此实现机械数控机床振动抑制的目的。
申请人:南通斯迈尔精密设备有限公司
地址:226000 江苏省南通市紫琅路30号狼山工业园10号楼1楼西
国籍:CN
更多信息请下载全文后查看。

数控车床振动的控制Ⅰ:振源与力学模型
李耀刚;张文明
【期刊名称】《机床与液压》
【年(卷),期】2004(000)007
【摘要】本文论述了数控车床的振源,建立了三种力学模型,并进行了分析,为数控机床的数学模型的建立和振动的控制打下了基础.
【总页数】2页(P55-56)
【作者】李耀刚;张文明
【作者单位】北京科技大学,北京,100083;河北理工学院,河北,唐山,063009;北京科技大学,北京,100083
【正文语种】中文
【中图分类】TG659
【相关文献】
1.基于TK40A数控车床的切削自激振动控制研究 [J], 何庆稀
2.数控车床的切削振动分析与控制方案 [J], 宋福林;张加锋
3.振源为振动电机的振动筛有限元分析方法概述 [J], 冯微微;李素妍;安殿伟
4.手扶拖拉机手把振动的振源及振动特性 [J], 焦群英;汪倩华
5.基于动力学模型前馈的液压振动台控制 [J], 高长虹;何彪;熊珊
因版权原因,仅展示原文概要,查看原文内容请购买。
机床颤振的若干研究和进展摘要:本文根据颤振的发生机理分别阐述了机床颤振的理论模型的研究方法和发展过程,并且着重讨论了近十几年在机床颤振的控制及在线监控领域内的动态和进展。
从文中可以看出机床颤振的研究日益深入,并且与其它学科之间不断交叉发展。
关键词:颤振;非线性;在线监控;稳定性0 引言在机械制造工艺学的学习中,我初步了解了机械加工过程中的振动及其分类。
振动的产生,使工艺系统的正常切削过程受到干扰和破坏,进而在工件表面形成了振纹,降低了零件的加工精度和表面质量。
强烈的振动会使切削过程无法进行,甚至造成刀具“崩刃”。
振动影响刀具的耐用度和机床的使用寿命,还会发出刺耳的噪声,使工作环境趋于恶化,影响工人的身心健康。
随着现代工业的发展,高效、高速、强力切削和磨削加工成为机械加工发展的重要方向,但是由此引发的强迫振动、自激振动等,都是实现和推广这些加工方法的障碍。
在机床上发生的自激振动类型较多,例如回转主轴(或与工件联系、或与刀具联系)系统的扭转或者弯曲自激振动;机床床身、立柱、横梁等支撑件的弯曲或扭摆自激振动;切屑形成的周期性颤振和整台机床的摇晃。
此外还有机床工作台等移动部件在低速运行时所发生的张驰摩擦自激振动(通称爬行)等等。
通常把金属切削过程中表现为刀具与工件之间强烈的自激振动称为“颤振”。
自20世纪40年代以来,切削颤振一直是机械制造行业与切削加工领域的一项主要研究课题,同时发展出机床动力学、切削动力学的学科分支。
随着加工精度、生产效率、自动化、集成化程度的提高,现代化的制造系统——柔性制造系统(FMS)、计算机集成制造系统(CIMS)促进了颤振的在线监控与控制技术的发展。
另一方面随着计算机的发展和其深入应用,各学科各部门之间日益渗透和交叉,为切削颤振的研究提供了更为广阔的理论基础和技术手段,使得切削颤振的研究无论是在理论上还是在实际应用方面都有着深刻的变化和长足的发展。
【1】1颤振模型的理论研究和进展对于机床颤振的研究,很自然是从颤振的机理与模型的研究开始的。
现代控制理论基础上机实验报告之二基于降维观测器的亚微米超精密车床振动控制院系航天学院专业自动化姓名李蒙班号1004102指导老师王述一哈尔滨工业大学2013年6月5日一、工程背景介绍1.超精密车床隔振系统的作用超精密机床是实现超精密加工的关键设备,而环境振动又是影响超精密加工精度的重要因素。
为了充分隔离基础振动对超精密机床的影响,目前国内外均采用空气弹簧作为隔振元件,并取得了一定的效果,但是这属于被动隔振,这类隔振系统的固有频率一般在2Hz左右。
这种被动隔振方法难以满足超精密加工对隔振系统的要求。
为了解决这个问题,有必要研究被动隔振和主动隔振控制相结合的混合控制技术。
2.隔振系统的物理描述空气弹簧上图表示了亚微米超精密车床隔振控制系统的结构原理,其中被动隔振元件为空气弹簧,主动隔振元件为采用状态反馈控制策略的电磁作动器。
上图表示一个单自由度振动系统,空气弹簧具有一般弹性支承的低通滤波特性,其主要作用是隔离较高频率的基础振动,并支承机床系统;主动隔振系统具有高通滤波特性,其主要作用是有效地隔离较低频率的基础振动。
主、被动隔振系统相结合可有效地隔离整个频率范围内的振动。
床身质量的运动方程为:p a 0ms F F ++= (1)p F ——空气弹簧所产生的被动控制力; a F ——作动器所产生的主动控制力。
假设空气弹簧内为绝热过程,则被动控制力可以表示为:s sm机床质量c空气弹簧粘性阻尼系数 0k 空气弹簧刚度系数G主动隔振系统作动器(不表示参数)ss 地基位移机床位移p 0r r r e e {1[/()]}n F cy k y p V V A y A =++-+ (2)r V ——标准压力下的空气弹簧体积;0y s s =-——相对位移(被控制量);r p ——空气弹簧的参考压力;r A ——参考压力下单一弹簧的面积;e r 4A A =——参考压力下空气弹簧的总面积; n ——绝热系数。
电磁作动器的主动控制力与电枢电流、磁场的磁通量密度及永久磁铁和电磁铁之间的间隙面积有关,这一关系具有强非线性。
现代控制理论基础
上机实验报告之一
基于降维观测器的超精密车床振动控制
院系自动控制原理课程设计
专业航天学院自动化专业
姓名
班级
学号
指导教师强盛
哈尔滨工业大学
2015年6月16日
一:降维观测器设计的工程背景简介
在实验一中针对亚微米超精密车床的振动控制系统,我们采用全状态反馈法设计了控制规律。
但是在工程实践中,传感器一般只能测量基座和床身的位移信号,不能测量它们的速度及加速度信号,所以后两个状态变量不能获得,换句话说全状态反馈很难真正实现。
为了解决这个问题,本实验设计一个降维(2维)状态观测器,用来解决状态变量 2x 、3x 的估计问题,从而真正实现全状态反馈控制。
二:实验目的
通过本次上机实验,使同学们熟练掌握:
降维状态观测器的概念及设计原理; 线性系统分离原理的内涵;
进一步熟悉极点配置及状态反馈控制律的设计过程; MATLAB 语言的应用
三:闭环系统的性能指标要求
闭环系统渐近稳定; 降维观测器渐近稳定。
四:实际给定参数
假设某一亚微米超精密车床隔振系统的各个参数为:
01200N /m k =
980N /A e k =
kg 120=m
2.0=c
Ω300=R
H 95.0=L
五:控制系统的开环状态空间模型
u x x x x x x ⎥⎥⎥⎦
⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢
⎢⎣⎡---=⎥⎥⎥⎥⎥⎦
⎤
⎢⎢⎢⎢⎢⎣⎡1008.3155.109.3157100010
321.3.2.1
[]⎥⎥⎥⎦
⎤
⎢⎢⎢⎣⎡-=321006.8x x x y 六:降维观测器方程的推导过程
设⎥⎦
⎤
⎢⎣⎡=21l l L ,则带入1222LA A -可得:
⎥⎦⎤⎢
⎣⎡----=-8.3155.101
2
1
1222l l LA A
2112
12225.108.315)8.315
(l l l LA A I +++++=+-λλλ (1) 将降维观测器极点配置在-180,-180,则:
32400
360)'(2
++=λλλf (2)
(1)式与(2)式对应项系数相等,即:
⎩
⎨⎧
=++=+324005.108.3153608.315211l l l (3)
解(3)求得:
⎩⎨⎧==14.18431
2.4421l l
易知:
u B y L x LA A x 21222)('++-= (4)
将L 带入(4)式得:
u y x x ⎥⎦
⎤
⎢⎣⎡+⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡---=1014.184312.44'8.31564.1844112.44' 令:
⎩⎨⎧-=-=Ly
x z y L x z ''
(5)
将(5)带入(4)式,可得:
u x z ⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡---=108.31564.18441
12
.44 u y z ⎥⎦
⎤
⎢⎣⎡+⎥⎦⎤⎢⎣⎡-+⎥⎦⎤⎢⎣⎡---=105.66356745.164778.31564.1844112.44 七:基于降维观测器的状态反馈控制律设计 根据实验1已得出状态反馈控制律为
3218.1975.19341.11342x x x u +--= (6)
现在应当改为
'8.197'5.19341.11342321x x x u +--=
)14.18431(8.197)2.44(5.19341.1134212111x z x z x +++--=
121492.35488328.1975.1934x z z ++-=
至此,整个闭环系统的方程可以写为:
)
492.35488328.1975.1934(1008.3155.109.3157100010
121321.3.2.1x z z x x x x x x ++-⨯⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢
⎢⎣⎡---=⎥⎥⎥⎥⎥⎦
⎤
⎢⎢⎢⎢⎢⎣⎡
)
492.35488328.1975.1934(105.66356745.164778.31564.1844112.44121x z z y z z ++-⨯⎥⎦
⎤
⎢⎣⎡+⎥⎦⎤⎢⎣⎡-+⎥⎦⎤⎢⎣⎡---=
八:闭环系统数字仿真 给定初始条件:
51(0)610m
x -=⨯,
52(0)210m/s
x -=⨯,
523(0)0.810m/s x -=-⨯,21(0) 1.810z -=⨯,2(0)6z =。
设计simiulink 仿真图如图1:
图1
示波器仿真图如下:
图2
图3
图4
图5
图6
九:实验结论及心得
由示波器仿真图可知,闭环系统渐近稳定,降维观测器渐近稳定。
通过这次仿真实验,我充分掌握了控制系统机理建模、时域性能指标与极点配置的关系、状态反馈控制率设计以及simiulink仿真的知识技能,为今后的控制系统设计学习与研究有很大意义。