机械原理概念题及答案
- 格式:doc
- 大小:150.50 KB
- 文档页数:11
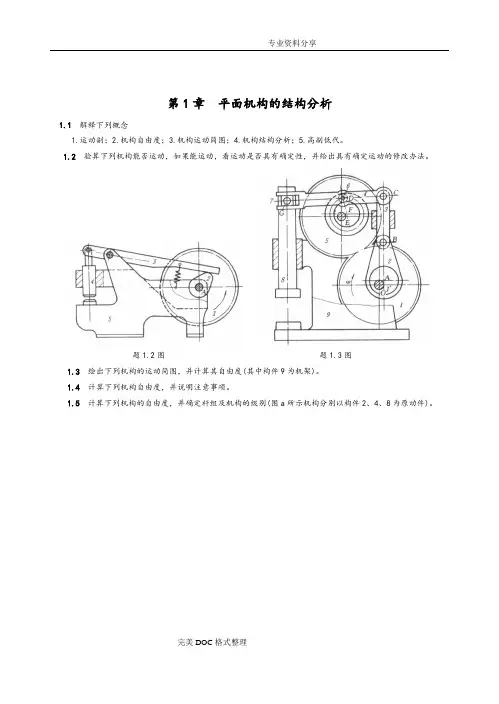
第1章平面机构的结构分析1.1解释下列概念1.运动副;2.机构自由度;3.机构运动简图;4.机构结构分析;5.高副低代。
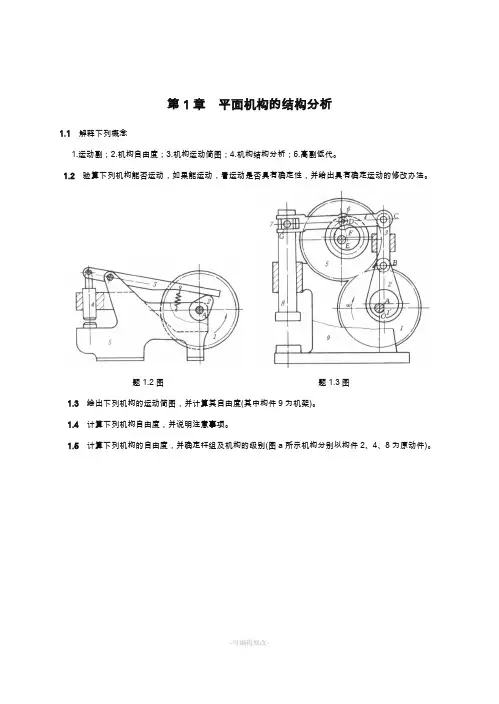
1.2验算下列机构能否运动,如果能运动,看运动是否具有确定性,并给出具有确定运动的修改办法。
题1.2图题1.3图1.3 绘出下列机构的运动简图,并计算其自由度(其中构件9为机架)。
1.4 计算下列机构自由度,并说明注意事项。
1.5计算下列机构的自由度,并确定杆组及机构的级别(图a所示机构分别以构件2、4、8为原动件)。
题1.4图题1.5图第2章平面机构的运动分析2.1试求图示各机构在图示位置时全部瞬心。
题2.1图2.2在图示机构中,已知各构件尺寸为l AB=180mm , l BC=280mm , l BD=450mm ,l CD=250mm ,l AE =120mm ,φ=30º, 构件AB上点E的速度为v E=150 mm /s ,试求该位置时C、D两点的速度及连杆2的角速度ω2。
2.3 在图示的摆动导杆机构中,已知l AB=30mm , l AC=100mm , l BD=50mm ,l DE=40mm ,φ1=45º,曲柄1以等角速度ω1=10 rad/s沿逆时针方向回转。
求D点和E点的速度和加速度及构件3的角速度和角加速度(用相对运动图解法)。
题2.2图题2.3图2.4 在图示机构中,已知l AB =50mm , l BC =200mm , x D =120mm , 原动件的位置φ1=30º, 角速度ω1=10 rad/s ,角加速度α1=0,试求机构在该位置时构件5的速度和加速度,以及构件2的角速度和角加速度。
题2.4图2.5 图示为机构的运动简图及相应的速度图和加速度图。
(1)在图示的速度、加速度多边形中注明各矢量所表示的相应的速度、加速度矢量。
(2)以给出的速度和加速度矢量为已知条件,用相对运动矢量法写出求构件上D 点的速度和加速度矢量方程。
机械原理试题及答案1. 试题一,简答题。
1) 什么是机械原理?2) 机械原理的研究对象是什么?3) 机械原理的基本原理是什么?答案:1) 机械原理是研究力、运动和能量传递规律的一门学科,它是研究机械运动和相互作用的基础。
2) 机械原理的研究对象是机械系统的结构、运动和力学性能。
3) 机械原理的基本原理是牛顿运动定律、能量守恒定律和动量守恒定律。
2. 试题二,计算题。
一辆质量为500kg的小车,以20m/s的速度行驶,经过一个半径为50m的圆弯道,求小车通过弯道时的向心加速度。
答案:小车通过弯道时的向心加速度a = v^2 / r = (20m/s)^2 / 50m = 8m/s^2。
3. 试题三,分析题。
一台起重机吊起一个重量为5000N的物体,起重机的钢丝绳与物体的夹角为30°,求起重机需要施加的力和力的方向。
答案:起重机需要施加的力F = 5000N / sin30° = 10000N,力的方向与钢丝绳的方向一致。
4. 试题四,综合题。
一台汽车的发动机输出功率为100kW,汽车的质量为1500kg,求汽车以10m/s的速度行驶时所受到的阻力。
答案:汽车行驶时所受到的阻力R = 功率 / 速度 = 100kW / 10m/s = 10000N。
5. 试题五,应用题。
一根长为2m的杠杆,在离支点1m处施加100N的力,求杠杆的支点受到的力和力的方向。
答案:杠杆的支点受到的力F = 100N 1m / 1m = 100N,力的方向与杠杆的方向相反。
通过以上试题及答案的学习,我们可以更加深入地了解机械原理的基本概念、应用方法和计算技巧。
希望大家能够通过不断的练习和思考,掌握机械原理的基本原理和应用技能,为今后的学习和工作打下坚实的基础。
机械原理试题库及答案一、选择题1. 机械运动的基本概念是什么?A. 物体位置的变化B. 物体形状的变化C. 物体质量的变化D. 物体密度的变化答案:A2. 以下哪个不是机械运动的分类?A. 平移运动B. 旋转运动C. 振动运动D. 热运动答案:D3. 机构具有确定运动的条件是什么?A. 至少有一个构件固定不动B. 至少有两个构件固定不动C. 所有构件都固定不动D. 没有固定不动的构件答案:A二、填空题4. 机械原理中,________是用来描述构件之间相对运动的几何学关系。
答案:运动副5. 机械设计中,________是指构件在力的作用下不发生失稳或破坏的能力。
答案:强度三、简答题6. 简述平面四杆机构的基本类型及其特点。
答案:平面四杆机构的基本类型包括双曲柄机构、双摇杆机构和曲柄摇杆机构。
双曲柄机构具有两个曲柄,运动平稳,但存在死点;双摇杆机构没有曲柄,运动不平稳,但结构简单;曲柄摇杆机构结合了前两者的特点,一个曲柄和一个摇杆,运动较为平稳,是应用最广泛的类型。
7. 解释什么是传动比,并给出计算传动比的公式。
答案:传动比是指传动系统中输入轴与输出轴的转速比。
计算传动比的公式为:\[ i = \frac{n_{输入}}{n_{输出}} \]四、计算题8. 已知一个平面四杆机构,其中曲柄长度为200mm,摇杆长度为300mm,求该机构的最短和最长行程。
答案:根据四杆机构的运动学公式,最短行程为曲柄和摇杆长度之和,即500mm;最长行程为曲柄和摇杆长度之差的绝对值,即100mm。
9. 某机械系统的传动比为3:1,输入转速为1500转/分钟,求输出转速。
答案:根据传动比公式,输出转速为输入转速除以传动比,即\[ n_{输出} = \frac{n_{输入}}{i} = \frac{1500}{3} = 500 \] 转/分钟。
五、论述题10. 论述机械原理在现代机械设计中的重要性及其应用。
答案:机械原理是机械设计的基础,它涉及到机械运动的规律、机械结构的设计原理以及机械传动的效率等。
机械原理试题库及答案1. 问题:什么是机械原理?答案:机械原理是研究机械运动和力学性质的基本规律的科学。
它涉及到力学、材料学、电气学等多个学科的知识。
2. 问题:什么是力学?答案:力学是研究物体运动、力的作用和物体相互作用的科学。
它主要包括静力学、动力学和变形力学等分支。
3. 问题:什么是力?答案:力是使物体发生运动、改变速度或形状的作用。
它是一个矢量量,有大小和方向。
4. 问题:什么是力的平衡条件?答案:力的平衡条件是指在一个物体上作用的合力为零时,物体处于力的平衡状态。
它可以分为力的平衡和力的矩的平衡两个条件。
5. 问题:什么是摩擦力?答案:摩擦力是两个物体相互接触,并阻碍其相对运动的力。
它有静摩擦力和动摩擦力两种形式。
6. 问题:什么是杠杆原理?答案:杠杆原理是指在平衡条件下,杠杆两边所受到的力和力臂的乘积相等。
它描述了杠杆的力学性质。
7. 问题:什么是滑轮原理?答案:滑轮原理是指通过改变力的方向和大小来实现力的传递或减小的原理。
滑轮可以改变力的方向,同时根据滑轮的个数可以改变力的大小。
8. 问题:什么是齿轮原理?答案:齿轮原理是指通过两个或多个齿轮的啮合,实现力的传递和传动的原理。
齿轮可以改变力的方向、速度和扭矩。
9. 问题:什么是机械传动?答案:机械传动是指通过齿轮、皮带、链条等传动装置,将动力传递到机械系统中的过程。
它可以改变力的大小、方向和转速。
10. 问题:什么是弹簧原理?答案:弹簧原理是指在受到外力作用时,弹簧会发生弹性变形,并反向作用力的原理。
弹簧具有储存和释放能量的功能。
机械原理考试题及答案一、选择题(每题2分,共20分)1. 机械运动的基本形式包括哪些?A. 平移和旋转B. 平移和振动C. 旋转和摆动D. 平移、旋转和摆动2. 以下哪个不是机械原理中的基本概念?A. 机构B. 运动链C. 机械系统D. 电子元件3. 机械效率的定义是什么?A. 有用功与总功之比B. 总功与有用功之比C. 总功与额外功之比D. 额外功与有用功之比4. 以下哪个是平面四杆机构的基本类型?A. 双摇杆机构B. 曲柄滑块机构C. 曲柄连杆机构D. 所有选项都是5. 曲柄连杆机构中,曲柄的作用是什么?A. 将转动运动转换为直线运动B. 将直线运动转换为转动运动C. 将转动运动转换为摆动运动D. 将摆动运动转换为转动运动6. 以下哪个不是机械传动的特点?A. 传动效率高B. 结构简单C. 传动比大D. 需要复杂的控制7. 机械的工作原理是什么?A. 利用机械能转换和传递能量B. 利用电能转换和传递能量C. 利用热能转换和传递能量D. 利用光能转换和传递能量8. 机械运动的三个基本要素是什么?A. 速度、加速度和方向B. 速度、力和方向C. 力、加速度和时间D. 速度、力和时间9. 以下哪个不是机械设计中考虑的因素?A. 材料选择B. 制造成本C. 维护方便D. 外观颜色10. 机械运动的分类有哪些?A. 平面运动和空间运动B. 直线运动和曲线运动C. 旋转运动和摆动运动D. 所有选项都是二、填空题(每空2分,共20分)1. 机械运动中,______是最基本的运动形式。
2. 机械原理中,______是指由两个或两个以上的构件通过运动副连接而成的组合体。
3. 在机械效率的计算中,______是衡量机械性能好坏的重要指标。
4. 平面四杆机构中,______机构可以实现曲柄的连续旋转。
5. 曲柄连杆机构中,______是实现往复运动转换为旋转运动的关键部件。
6. 机械传动中,______是实现能量传递和转换的基本方式。
机械原理试题及答案一、选择题(每题2分,共10分)1. 机械运动的基本概念是什么?A. 力B. 运动C. 力和运动D. 能量答案:C2. 机械效率的计算公式为:A. 功/功率B. 功率/功C. 有用功/总功D. 总功/有用功答案:C3. 以下哪个不是机械运动的类型?A. 平动B. 转动C. 振动D. 热运动答案:D4. 机械运动的三个基本要素是:A. 力、速度、加速度B. 力、位移、时间C. 速度、位移、时间D. 力、位移、速度答案:C5. 机械运动的基本原理是什么?A. 牛顿运动定律B. 能量守恒定律C. 动量守恒定律D. 以上都是答案:D二、填空题(每题3分,共15分)1. 机械运动的基本原理是__________。
答案:牛顿运动定律2. 机械效率的计算公式是__________。
答案:有用功/总功3. 机械运动的三个基本要素是__________。
答案:速度、位移、时间4. 机械运动的类型包括__________。
答案:平动、转动、振动5. 机械运动的基本概念是__________。
答案:力和运动三、简答题(每题5分,共20分)1. 简述机械运动的基本原理。
答案:机械运动的基本原理是牛顿运动定律,它描述了力和物体运动之间的关系,包括惯性定律、加速度定律和作用与反作用定律。
2. 机械效率是如何定义的?答案:机械效率是指机械在完成工作时有用功与总功的比值,它反映了机械工作时能量利用的效率。
3. 机械运动的三个基本要素是什么?答案:机械运动的三个基本要素是速度、位移和时间,它们共同描述了物体运动的状态和过程。
4. 机械运动的类型有哪些?答案:机械运动的类型包括平动、转动和振动。
平动是指物体在直线路径上的运动,转动是指物体围绕固定点或轴的旋转运动,振动是指物体或质点在其平衡位置附近进行的往复运动。
四、计算题(每题10分,共20分)1. 已知一个机械系统完成有用功为500J,总功为800J,请计算该机械系统的机械效率。
机械原理试题库及答案以下是机械原理的试题及答案:1. 什么是机械原理?机械原理是研究机械运动的基本规律和原理的学科。
2. 什么是机械工作原理?机械工作原理是指机械在工作过程中所采用的运动方式和工作原理。
3. 机械传动有哪些基本方式?机械传动的基本方式包括齿轮传动、带传动和链传动等。
4. 齿轮传动的优点是什么?齿轮传动具有传递比稳定、传递效率高、承载能力大等优点。
5. 什么是连杆机构?连杆机构是由连杆和铰链连接构成的一种机械机构,常用于转换运动。
6. 什么是滑块副?滑块副是由滑动副和固定副组成的一种机械副,常用于直线运动的转换。
7. 转动副有哪些种类?转动副包括转动副、螺旋副、滚动副等。
8. 什么是机械摩擦?机械摩擦是指机械件在相互接触过程中产生的阻力。
9. 什么是机械磨损?机械磨损是指机械件在摩擦过程中表面的物质损失。
10. 如何减少机械摩擦和磨损?可以采取润滑措施、改变工作条件和加工精度等方式减少机械摩擦和磨损。
答案:1. 机械原理是研究机械运动的基本规律和原理的学科。
2. 机械工作原理是指机械在工作过程中所采用的运动方式和工作原理。
3. 机械传动的基本方式包括齿轮传动、带传动和链传动等。
4. 齿轮传动具有传递比稳定、传递效率高、承载能力大等优点。
5. 连杆机构是由连杆和铰链连接构成的一种机械机构,常用于转换运动。
6. 滑块副是由滑动副和固定副组成的一种机械副,常用于直线运动的转换。
7. 转动副包括转动副、螺旋副、滚动副等。
8. 机械摩擦是指机械件在相互接触过程中产生的阻力。
9. 机械磨损是指机械件在摩擦过程中表面的物质损失。
10. 可以采取润滑措施、改变工作条件和加工精度等方式减少机械摩擦和磨损。
机械原理试题库及答案一、选择题1. 机械运动的基本形式包括:A. 平移运动B. 旋转运动C. 平面运动D. 所有选项都是答案:D2. 机械效率是指:A. 机械输出功率与输入功率之比B. 机械输入功率与输出功率之比C. 机械输出功率与机械重量之比D. 机械重量与输入功率之比答案:A3. 以下哪个不是机械运动的约束条件:A. 几何约束B. 力的约束C. 速度约束D. 材料约束答案:D二、填空题4. 在机械原理中,_________是指机械系统中各部件之间相互联系和作用的规律。
答案:运动学5. 机械设计时,为了提高机械的_________,通常需要考虑减少摩擦力。
答案:效率6. 机构的运动分析通常包括_________分析和_________分析。
答案:运动学;动力学三、简答题7. 简述机械原理中平面四杆机构的基本类型及其特点。
答案:平面四杆机构的基本类型包括双曲柄机构、曲柄摇杆机构、双摇杆机构和曲柄滑块机构。
双曲柄机构具有两个曲柄,运动平稳,但结构复杂;曲柄摇杆机构有一个曲柄和一个摇杆,可以实现直线运动和圆周运动的转换;双摇杆机构没有曲柄,运动较为复杂,但结构简单;曲柄滑块机构可以实现曲柄的旋转运动转换为滑块的直线运动。
8. 机械原理中,如何通过齿轮传动实现减速?答案:通过齿轮传动实现减速,通常采用小齿轮与大齿轮的啮合。
小齿轮的转速高,大齿轮的转速低,通过这种方式,输入轴的高速旋转可以转换为输出轴的低速旋转,从而实现减速。
四、计算题9. 已知一机械系统,输入功率为10千瓦,输出功率为8千瓦,求该系统的机械效率。
答案:机械效率 = 输出功率 / 输入功率 = 8千瓦 / 10千瓦 =0.8,即80%。
10. 设计一个平面四杆机构,要求机构的最短行程为0.2米,最长行程为0.6米,求机构中最短杆的长度。
答案:假设最短杆的长度为L,最长杆的长度为2L(根据四杆机构的几何关系),则最短行程时,最短杆与最长杆的和等于最短杆与最长杆的差,即L + 2L = 0.2米 + 0.6米,解得L = 0.4米。
第1章平面机构的结构分析1.1解释下列概念1.运动副;2.机构自由度;3.机构运动简图;4.机构结构分析;5.高副低代。
1.2验算下列机构能否运动,如果能运动,看运动是否具有确定性,并给出具有确定运动的修改办法。
题1.2图题1.3图1.3 绘出下列机构的运动简图,并计算其自由度(其中构件9为机架)。
1.4 计算下列机构自由度,并说明注意事项。
1.5计算下列机构的自由度,并确定杆组及机构的级别(图a所示机构分别以构件2、4、8为原动件)。
题1.4图题1.5图第2章平面机构的运动分析2.1试求图示各机构在图示位置时全部瞬心。
题2.1图2.2在图示机构中,已知各构件尺寸为l AB=180mm , l BC=280mm , l BD=450mm ,l CD=250mm ,l AE=120mm ,φ=30º, 构件AB上点E的速度为v E=150 mm /s ,试求该位置时C、D两点的速度及连杆2的角速度ω2。
2.3 在图示的摆动导杆机构中,已知l AB=30mm , l AC=100mm , l BD=50mm ,l DE=40mm ,φ1=45º,曲柄1以等角速度ω1=10 rad/s沿逆时针方向回转。
求D点和E点的速度和加速度及构件3的角速度和角加速度(用相对运动图解法)。
题2.2图题2.3图2.4 在图示机构中,已知l AB =50mm , l BC =200mm , x D =120mm , 原动件的位置φ1=30º, 角速度ω1=10 rad/s ,角加速度α1=0,试求机构在该位置时构件5的速度和加速度,以及构件2的角速度和角加速度。
题2.4图2.5 图示为机构的运动简图及相应的速度图和加速度图。
(1)在图示的速度、加速度多边形中注明各矢量所表示的相应的速度、加速度矢量。
(2)以给出的速度和加速度矢量为已知条件,用相对运动矢量法写出求构件上D 点的速度和加速度矢量方程。
机械原理习题集答案第一章:机械运动学1. 问题:简述平面运动的基本概念。
答案:平面运动是指物体在平面内的运动,其轨迹可以是直线或曲线。
在平面运动中,物体的每一个点都在同一平面内移动。
2. 问题:什么是四杆机构的运动规律?答案:四杆机构是最基本的机械机构之一,其运动规律取决于杆的长度和连接方式。
常见的四杆机构有双曲柄机构、曲柄滑块机构等。
第二章:机械动力学1. 问题:牛顿运动定律在机械设计中的应用是什么?答案:牛顿运动定律是描述物体运动的基本定律,包括惯性定律、力的作用与反作用定律和作用力与加速度的关系。
在机械设计中,这些定律用于预测和计算机械系统的运动状态和受力情况。
2. 问题:简述达朗贝尔原理。
答案:达朗贝尔原理是动力学中的一个基本原理,它指出在没有外力作用的系统中,系统内各部分的动量守恒。
在机械设计中,这一原理常用于分析和计算机械系统的动态平衡。
第三章:机构设计与分析1. 问题:什么是机构的自由度?答案:机构的自由度是指在没有约束的情况下,机构能够独立进行的运动的数量。
自由度的计算公式为:\( F = 3n - 2j - h \),其中\( n \)是机构中杆件的数量,\( j \)是铰链的数量,\( h \)是高副的数量。
2. 问题:如何确定一个机构的运动类型?答案:确定机构的运动类型需要分析机构的几何形状和连接方式。
例如,如果机构中存在曲柄和滑块,它可能是一个曲柄滑块机构,其运动类型为往复直线运动。
第四章:机械结构设计1. 问题:机械结构设计中需要考虑哪些因素?答案:在机械结构设计中,需要考虑的因素包括材料的选择、强度和刚度的计算、尺寸的确定、成本控制、维护的便利性等。
2. 问题:什么是疲劳强度?答案:疲劳强度是指材料在反复加载和卸载过程中抵抗断裂的能力。
在机械结构设计中,需要考虑疲劳强度以确保结构的可靠性和耐久性。
第五章:机械传动1. 问题:什么是齿轮传动?答案:齿轮传动是一种利用齿轮啮合来传递运动和动力的机械传动方式。
机械原理试题题库及答案一、单项选择题1. 机械运动是指物体的相对位置随时间的()。
A. 变化B. 不变C. 随机D. 循环答案:A2. 在机械原理中,机构和机器的主要区别在于()。
A. 复杂程度B. 动力来源C. 能否完成有用的工作D. 尺寸大小答案:C3. 机械效率是指()。
A. 有用功与总功的比值B. 额外功与有用功的比值C. 总功与额外功的比值D. 有用功与额外功的比值答案:A二、填空题4. 一个完整的机械系统包括原动机、工作机、________和________。
答案:传动装置、控制装置5. 机械运动的三个基本形式是平动、转动和________。
答案:振动三、简答题6. 简述四杆机构的基本类型及其特点。
答案:四杆机构的基本类型包括曲柄滑块机构、双曲柄机构和双摇杆机构。
曲柄滑块机构的特点是存在一个固定铰链,能够将匀速转动转换为匀速直线运动;双曲柄机构的特点是两个铰链相对转动,能够将转动转换为转动;双摇杆机构的特点是不存在固定铰链,两个铰链相对摆动,运动形式较为复杂。
四、计算题7. 已知一平面连杆机构中,最短连杆长度为100mm,最长连杆长度为300mm,求该机构的极位失稳位置。
答案:根据格里布尔准则,当连杆长度大于或等于曲柄长度与连杆长度之和时,机构处于极位失稳状态。
设曲柄长度为l_c,连杆长度为l_a,最长连杆长度为l_max,则有l_a + l_c ≥ l_max。
由于最短连杆长度为l_c,所以l_c = 100mm,代入公式得l_a ≥ 200mm。
因此,当连杆长度为200mm时,机构处于极位失稳位置。
五、论述题8. 论述机械系统的设计与分析中,动力学分析的重要性及其应用。
答案:动力学分析在机械系统设计与分析中占据核心地位。
它涉及到机械系统中各部件在运动和受力情况下的性能表现。
通过动力学分析,可以预测和评估机械系统在实际工作条件下的动态响应,包括振动、冲击、疲劳寿命等。
这对于确保机械系统的可靠性、稳定性和安全性至关重要。
机械原理试题库及答案1. 什么是机械原理?机械原理是研究机械运动规律和机械结构性能的科学。
它是机械工程的基础学科,包括静力学、动力学、力学和材料力学等内容。
机械原理的研究对象是机械系统,通过对机械系统的分析和研究,可以揭示机械系统的运动规律和结构特性,为机械设计、制造和应用提供理论依据。
2. 机械原理试题。
2.1 静力学部分试题。
1) 什么是力的平衡条件?2) 什么是力的合成与分解?3) 什么是力矩?4) 什么是力的偶?5) 什么是静力学平衡?2.2 动力学部分试题。
1) 什么是牛顿运动定律?2) 什么是动量守恒定律?3) 什么是能量守恒定律?4) 什么是功和动能?5) 什么是动力学平衡?2.3 材料力学部分试题。
1) 什么是材料的应力与应变?2) 什么是弹性模量?3) 什么是屈服强度?4) 什么是材料的蠕变和疲劳?5) 什么是材料的断裂机理?3. 机械原理答案。
3.1 静力学部分答案。
1) 力的平衡条件是指作用在物体上的各个力合成为零的条件。
2) 力的合成与分解是指将一个力分解为若干个力的合成,或将若干个力合成为一个力的过程。
3) 力矩是力对物体产生转动效果的物理量,通常用于描述物体的平衡状态。
4) 力的偶是指作用在物体上的两个大小相等、方向相反的力,它们的作用线不重合,但在同一平面内。
5) 静力学平衡是指物体受到的所有外力合成为零的状态。
3.2 动力学部分答案。
1) 牛顿运动定律包括惯性定律、动力定律和作用-反作用定律,描述了物体的运动状态和受力情况。
2) 动量守恒定律指的是在一个封闭系统内,系统的总动量在没有外力作用下保持不变。
3) 能量守恒定律是指在一个封闭系统内,系统的总能量在没有外力作用下保持不变。
4) 功是力对物体做功的量,动能是物体由于运动而具有的能量。
5) 动力学平衡是指物体受到的合外力和合外力矩为零的状态。
3.3 材料力学部分答案。
1) 材料的应力是指单位面积上的内力,应变是指单位长度上的变形量。
机械原理试题及答案试卷答案一、选择题(每题2分,共20分)1. 下列哪个选项不属于机械的基本组成要素?A. 零件B. 部件C. 机构D. 系统答案:D2. 下列哪种机构属于高副机构?A. 齿轮机构B. 曲柄滑块机构C. 螺旋机构D. 摇杆机构答案:A3. 下列哪个选项不是机械设计的基本要求?A. 实用性B. 安全性C. 经济性D. 艺术性答案:D4. 下列哪种材料不适合用作机械零件?A. 钢B. 铝C. 塑料D. 橡胶答案:D5. 下列哪个选项不是机械传动的基本形式?A. 齿轮传动B. 摩擦传动C. 液压传动D. 磁悬浮传动答案:D二、填空题(每题2分,共20分)6. 机械原理是研究机械的______、______和______等方面的基本理论和方法的科学。
答案:结构、运动、力学7. 机械零件的疲劳破坏是由于______引起的。
答案:交变应力8. 机械零件的强度计算方法主要有______、______和______。
答案:安全系数法、许用应力法、极限载荷法9. 齿轮传动的失效形式主要有______、______和______。
答案:点蚀、齿面磨损、轮齿折断10. 机械系统的平衡条件是______、______和______。
答案:力平衡、力矩平衡、功率平衡三、判断题(每题2分,共20分)11. 零件和部件是机械的基本组成要素。
()答案:√12. 机械设计的基本要求不包括可靠性。
()答案:×13. 机械传动中的摩擦力总是有害的。
()答案:×14. 机械零件的疲劳破坏只与材料性能有关,与应力状态无关。
()答案:×15. 机械系统的平衡条件只包括力平衡和力矩平衡。
()答案:×四、简答题(每题10分,共30分)16. 简述机械原理的主要研究内容。
答案:机械原理的主要研究内容包括:机械的基本组成要素、机械的运动、机械的力学性能、机械零件的强度计算、机械传动、机械系统设计等。
机械原理考试题及答案一、选择题1. 下列哪项是机械原理的基本概念?A. 颗粒形成学B. 统计力学C. 理想机械D. 汽车设计答案:C. 理想机械2. 以下哪种是机械原理的运用范畴?A. 电子工程B. 土木工程C. 动力学D. 水利工程答案:C. 动力学3. 下列哪种是机械原理的基本原则?A. 热力学第一定律B. 牛顿第一定律C. 麦克斯韦方程D. 波尔定理答案:B. 牛顿第一定律4. 以下哪个是机械原理中的力学概念?A. 酸碱中和B. 动能定理C. 火力发电D. 光合作用答案:B. 动能定理5. 机械原理中的简支梁属于哪类结构?A. 框架结构B. 空间结构C. 平面结构D. 立体结构答案:C. 平面结构二、填空题1. 机械原理中描述物质存储和传递的物理量是__________。
答案:力2. 牛顿第二定律是机械原理中最为重要的定律之一,它的数学表达式是__________。
答案:F=ma3. 在机械原理中,能量守恒的基本原理是受守恒的那一个?答案:机械能量守恒4. 机械原理中,简谐振动的运动方程是__________。
答案:x=Acos(ωt)5. 机械原理中,力矩的公式是__________。
答案:τ=F×r三、问答题1. 请简述机械原理中动能公式的推导过程。
答:动能是物体由于运动而具有的能力,其公式为K=1/2mv²。
这个公式可以通过牛顿第二定律F=ma和功的定义W=∫Fdx进行推导得出。
2. 什么是机械原理中的静力学?答:静力学是机械原理中研究物体相对静止状态下受力平衡和连接的学科,主要研究平衡条件和摩擦力的问题。
3. 机械原理中的哈密顿原理是什么?答:哈密顿原理是指体系在一段时间内,其拉格朗日函数最小(或最大)的作用量原理,描述了系统的动力学行为。
4. 请说明机械原理中简支梁的结构及其在工程中的应用。
答:简支梁是机械原理中的一种平面结构,由两个支点支撑,主要用于支撑横跨的结构物。
机械原理考试题库附答案(最新版)一、单选题1.变位齿轮与标准齿轮基圆的大小()。
A、相等B、不相等C、不确定参考答案:A2.理论廓线相同而实际廓线不同的两个对心直动滚子从动件盘形凸轮,其推杆的运动规律是()。
A、相同的B、不相同的C、不一定的参考答案:A3.齿轮的渐开线形状取决于它的()直径。
A、齿顶圆B、分度圆C、基圆参考答案:C4.速度和加速度的影像原理只适用于()上。
A、整个机构B、主动件C、相邻两个构件D、同一构件参考答案:D5.当对心曲柄滑块机构的曲柄为原动件时,机构有无急回特性和死点?()A、有急回特性、有死点B、有急回特性、无死点C、无急回特性、无死点D、无急回特性、有死点参考答案:C6.齿轮渐开线在()上的压力角和曲率半径最小。
A、齿根圆B、基圆C、分度圆D、齿顶圆参考答案:B7.为使机构具有急回运动,要求行程速比系数()。
A、K=1B、K>1C、K<1参考答案:B8.两构件组成运动副的必要条件是两构件()。
A、直接接触且具有相对运动B、直接接触但无相对运动C、虽然不接触但具有相对运动D、既不接触也无相对运动参考答案:A9.在移动滚子从动件盘形凸轮机构中,若凸轮实际廓线保持不变,而增大或减小滚子半径,从动件运动规律会()。
A、改变B、不变参考答案:B10.平面四杆机构中,是否存在死点,取决于()是否与连杆共线。
A、主动件B、从动件C、机架D、摇杆参考答案:B11.下述几种运动规律中,()既不会产生柔性冲击也不会产生刚性冲击,可用于高速场合。
A、等速运动规律B、摆线运动规律(正弦加速度运动规律)C、等加速等减速运动规律D、简谐运动规律(余弦加速度运动规律)12.一对渐开线圆柱齿轮标准安装时,其分度圆压力角()。
A、大于啮合角B、等于啮合角C、.小于啮合角。
参考答案:B13.要将一个曲柄摇杆机构转化成双摇杆机构,可以将原机构的机架松开,而将原机构的()作为机架。
A、曲柄;B、连杆C、摇杆参考答案:C14.重合度=6表示一对轮齿啮合的时间在齿轮转过一个基圆齿距的时间内占()。
机械原理试题及答案一、选择题1. 机械运动的基本形式包括()。
A. 平移B. 旋转C. 平面运动D. 所有选项答案:D2. 以下哪个不是机械运动的约束类型?()A. 铰链约束B. 滑动约束C. 刚性约束D. 弹性约束答案:D二、填空题1. 机械原理中的运动链是由若干个组成。
答案:刚体2. 机械运动的自由度是指。
答案:系统可以独立进行的运动数量三、简答题1. 简述曲柄滑块机构的工作原理。
答案:曲柄滑块机构是一种将旋转运动转换为直线运动的机械机构。
它由曲柄、连杆和滑块组成。
曲柄的旋转通过连杆传递给滑块,使滑块沿直线路径做往复运动。
2. 描述平面四杆机构的基本类型及其特点。
答案:平面四杆机构主要有三种基本类型:双曲柄机构、双摇杆机构和曲摇杆机构。
双曲柄机构的特点是两个曲柄做整周旋转,双摇杆机构的特点是两个摇杆做往复摆动,曲摇杆机构则由一个曲柄和一个摇杆组成,曲柄做整周旋转而摇杆做往复摆动。
四、计算题1. 已知一平面四杆机构的杆长分别为L1=100mm,L2=150mm,L3=200mm,L4=50mm,求该机构的最短杆长度。
答案:最短杆长度为L4=50mm。
2. 假设一机械系统具有3个自由度,若要通过约束减少其自由度至1,需要添加多少个约束?答案:需要添加2个约束。
五、论述题1. 论述机械原理在现代机械设计中的应用及其重要性。
答案:机械原理是现代机械设计的基础,它涉及到机械运动的分析、机械结构的设计以及运动学和动力学的计算。
在现代机械设计中,机械原理的应用至关重要,它可以帮助设计师优化机械结构,提高机械性能,降低成本,确保机械系统的可靠性和安全性。
通过深入理解机械原理,设计师能够创造出更加高效、节能和环保的机械产品。
第2章机构的结构分析一、选择题1.机构中的构件是由一个或多个零件所组成,这些零件间 B 产生任何相对运动。
A.可以B.不能2.基本杆组的自由度应为 C 。
A.-1 B.+1 C.03.有两个平面机构的自由度都等于1,现用一个带有两铰链的运动构件将它们串成一个平面机构,则其自由度等于 B 。
A.0 B.1 C.24.平面运动副提供约束为 C 。
A.1 B.2 C.1或25.由4个构件组成的复合铰链,共有 B 个转动副。
A.2 B.3 C.46.计算机构自由度时,若计入虚约束,则机构自由度就会 C 。
A.不变B.增多C.减少二、填空题1.机器中每一个制造单元体称为零件。
2.局部自由度虽不影响机构的运动,却减小了高副元素的磨损,所以机构中常出现局部自由度。
3.机器中每一个独立的运动单元体称为构件。
4.平面运动副的最大约束数为 2 ,最小约束数为 1 。
5.两构件通过面接触而构成的运动副称为低副;通过点、线接触而构成的运动副称为高副。
6.两构件之间以线接触所组成的平面运动副,称为高副,它产生1 个约束。
三、判断题1.在平面机构中一个高副有两个自由度,引入一个约束。
(√)2.在杆组并接时可将同一杆组上的各个外接运动副连接在同一构件上。
(×)3.若两个构件之间组成了两个导路平行的移动副,在计算自由度时应算作两个移动副。
(×)4.六个构件组成同一回转轴线的转动副,则该处共有6个转动副。
(×)5.在平面机构中一个高副引入二个约束。
(×)6.任何具有确定运动的机构都是由机架加原动件再加自由度为零的杆组组成的。
(√)7.任何机构都是由机架加原动件再加自由度为零的基本杆组组成。
因此基本杆组是自由度为零的运动链。
(√)8.平面低副具有2个自由度,1个约束。
(×)9.当机构自由度F>0,且等于原动件数时,该机构具有确定运动。
(√)第3章平面机构的运动分析一、选择题1.平面六杆机构有共有 A 个瞬心。
A.15 B.12 C.6二、填空题1.不通过运动副直接相连的两构件间的瞬心位置可借助三心定理来确定。
2. 当两构件以转动副相连接时,两构件的速度瞬心在转动副的中心处。
三、判断题1.利用瞬心既可以对机构作速度分析,也可对其作加速度分析。
(×)2.速度瞬心是指两个构件相对运动时相对速度为零的点。
(√)第5章机械的效率和自锁一、填空题1.从效率的观点来看,机械的自锁条件是效率≤ 0。
2.机械发生自锁时,机械已不能运动,这时它所能克服的生产阻抗力≤ 0。
第7章机械的运转及其速度波动的调节一、选择题1.为了减小机械运转中周期性速度波动的程度,应在机械中安装 B 。
A.调速器B.飞轮C.变速装置2.在最大盈亏功和机器运动不均匀系数不变前提下,将飞轮安装轴的转速提高一倍,则飞轮的转动惯量将等于原飞轮转动惯量的 C 。
A.2 B.1/2 C.1/43.为了减轻飞轮的重量,飞轮最好安装在 C 上。
A.等效构件上B.转速较低的轴上C.转速较高的轴上4.对于存在周期性速度波动的机器,安装飞轮主要是为了在 B 阶段进行速度调节A.起动B.稳定运转C.停车5.如果不改变机器主轴的平均角速度,也不改变等效驱动力矩和等效阻抗力矩的变化规律,拟将机器运动不均匀系数从0.10降到0.01,则飞轮的转动惯量将近似等于原飞轮转动惯量的 A 。
A.10 B.100 C.1/106.有三个机械系统,它们主轴的最大转速和最小转速分别是:(1)1025r/min,975r/min;(2)512.5r/min,487.5r/min;(3)525r/min,475r/min;其中运转最不均匀的是 C 。
A.(1)B.(2)C.(3)二、填空题1.机器是在外力作用下运转的,当外力作功表现为盈功时,机器处在增速阶段,当外力作功表现为亏功时,机器处在减速阶段。
2.在机器中安装飞轮能在一定程度上减小机器的周期性速度波动量。
3.对于机器运转的周期性速度波动,一个周期内驱动力与阻力所做的是相同的。
4.把具有等效转动惯量,其上作用有等效力矩的绕固定轴转动的等效构件,称为原机械系统的等效动力学模型。
三、判断题1.为了减轻飞轮的重量,最好将飞轮安装在机械的高速轴上。
(√)2.为了使机器稳定运转,机器中必须安装飞轮。
(×)3.机器中安装飞轮后,可使机器运转时的速度波动完全消除。
(×)第8章连杆机构及其设计一、选择题1.设计连杆机构时,为了具有良好的传动条件,应使 A 。
A.传动角大一些,压力角小一些B.传动角和压力角都小一些C.传动角和压力角都大一些2.平面连杆机构的行程速比系数K值的可能取值范围是 A 。
A.1≤K≤3 B.1≤K≤2 C.0≤K≤13.一曲柄摇杆机构,若改为以曲柄为机架,则将演化为 A 。
A.双曲柄机构B.曲柄摇杆机构C.双摇杆机构4.曲柄摇杆机构中,当曲柄为主动件时,最小传动角出现在 A 位置。
A.曲柄与机架共线B.摇杆与机架共线C.曲柄与连杆共线5.要将一曲柄摇杆机构转化成双摇杆机构,可以采用将原机构的 C 作为新机架的方法来获得。
A.曲柄B.连杆C.摇杆6.在铰链四杆机构中,当满足“最短杆长度+最长杆长度≤其余两杆长度之和”时,以 A 机架,该机构为双摇杆机构。
A.最短杆的对边B.最短杆C.最短杆的邻边7.无急回特性的平面连杆机构中,行程速比系数 B 。
A.K<1 B.K=1 C.K>18.在下列机构中,不会出现死点的机构是 A 。
A.导杆(从动)机构B.曲柄(从动)摇杆机构C.曲柄(从动)滑块机构9.当四杆机构处于死点位置时,机构的压力角 B 。
A.为0°B.为90°C.与构件尺寸有关10.铰链四杆机构中若最短杆和最长杆长度之和大于其他两杆长度之和时,则机构中 B 。
A.一定有曲柄存在B.一定无曲柄存在C.是否有曲柄存在还要看机架是哪一个构件11.曲柄摇杆机构 B 存在急回特性。
A.一定B.不一定C.一定不12.平面四杆机构所含移动副的个数最多为 C 。
A.0 B.1 C.213.四杆机构的急回特性是针对主动件作 A 而言的。
A.等速转动B.等速移动C.变速转动或变速移动14.对于双摇杆机构,最短构件与最长构件长度之和 B 大于其它两构件长度之和。
A.一定B.不一定C.一定不15.如果铰链四杆运动链中有两个构件长度相等且均为最短,若另外两个构件长度也相等,则当两最短构件相邻时,有 B 整转副。
A.两个B.三个C.四个16.平行四边形机构工作时,其传动角 A 。
A.是变化值B.始终保持90度C.始终是0度17.铰链四杆机构中有两个构件长度相等且最短,其余构件长度不同,若取一个最短构件作机架,则得到 C 机构。
A.曲柄摇杆B.双曲柄C.双摇杆18.对心曲柄滑块机构以曲柄为原动件时,其最大传动角为 A 。
A.90°B.45°C.30°19.下列平面四杆机构中,一定无急回特性的机构是 A 。
A.平行四边形机构B.曲柄摇杆机构C.偏置曲柄滑块机构二、填空题1.在曲柄摇杆机构中,当以摇杆为主动件,曲柄与连杆两次共线时,则机构出现死点位置。
2.在曲柄摇杆机构中,若以摇杆为原动件,则曲柄与连杆共线位置是死点位置。
3.在曲柄滑块机构中,滑块的极限位置出现在曲柄与连杆共线位置。
4.铰链四杆机构的基本形式有曲柄摇杆机构、双曲柄机构和双摇杆机构。
5.当四杆机构的压力角α=90°时,传动角等于0°,该机构处于死点位置。
6.铰链四杆机构ABCD中,已知:l AB=60mm,l BC=140mm,l CD=120mm,l AD=100mm。
若以AB杆为机架得双曲柄机构;若以CD杆为机架得双摇杆机构;若以AD杆为机架得曲柄摇杆机构。
三、判断题1.一个铰链四杆机构若为双摇杆机构,则最短杆长度与最长杆长度之和一定大于其余两杆长度之和。
(×)2.平面四杆机构处于死点位置时,机构的传动角等于零。
(√)3.在铰链四杆机构中,当行程速比系数K>1时,机构一定有急回特性。
(√)4.曲柄摇杆机构的极位夹角一定大于零。
(×)5.具有急回特性的四杆机构只有曲柄摇杆机构、偏置曲柄滑块机构和摆动导杆机构。
(×)6.四杆机构处于死点位置时,机构的传动角一定为零。
(√)7.对于双摇杆机构,最短构件与最长构件长度之和一定大于其余两构件长度之和。
(×)8.双摇杆机构一定不存在整转副。
(×)9.对心曲柄滑块机构,当曲柄为主动件时机构无急回特性。
(√)10.满足杆长条件的铰链四杆机构一定有曲柄存在。
(×)11.在四杆机构中,当最短杆长度与最长杆长度之和大于其余两杆长度之和时,且以最短杆的邻边为机架,该机构为曲柄摇杆机构。
(×)12.对心曲柄滑块机构无急回运动。
(√)第9章凸轮机构及其设计一、选择题1.在设计滚子推杆盘形凸轮机构时,为防止凸轮的工作廓线出现变尖或失真现象,滚子半径应 B 凸轮的理论廓线外凸部分的最小曲率半径。
A.大于;B.小于C.等于2.在偏置直动尖顶推杆盘形凸轮机构中,基圆的大小会影响 A 。
A.凸轮机构的压力角B.推杆的位移C.推杆的速度3.在设计滚子推杆盘形凸轮机构时,凸轮的轮廓曲线出现尖顶的原因是因为滚子半径 B 该位置理论廓线的曲率半径。
A.小于;B.等于C.大于4.凸轮机构中推杆的运动规律决定于 A 。
A.凸轮的轮廓形状B.推杆的形状C.凸轮的材料5.在凸轮机构中,推杆的 A 运动规律存在刚性冲击。
A.一次多项式B.二次多项式C.正弦加速度6.在凸轮机构中,若增大凸轮机构的推程压力角,则该凸轮机构的凸轮基圆半径将 B 。
A.增大B.减小C.不变7.直动平底推杆盘形凸轮机构的压力角 B 。
A.永远等于0度B.等于常数C.随凸轮转角而变化8.设计一直动推杆盘形凸轮机构,当凸轮转速及推杆运动规律不变时,若最大压力角由40°减小到20°时,则凸轮尺寸会 A 。
A.增大B.减小C.不变9.对于转速较高的凸轮机构,为了减小冲击和振动,推杆运动规律最好采用C 运动规律。
A.一次多项式B.二次多项式C.正弦加速度10.当凸轮基圆半径相同时,推杆采用适当的偏置方式,可以 A 凸轮机构推程的压力角A.减小B.增加C.保持原来11.凸轮机构中推杆按二次多项式运动规律运动时将产生 B 冲击。
A .刚性B.柔性C.无刚性也无柔性12.若推杆的运动规律选择为一次多项式运动规律、二次多项式运动规律、简谐运动规律或正弦加速度运动规律,当把凸轮转速提高一倍时,推杆的速度是原来的 B 倍。
A.1 B.2 C.413.尖顶推杆凸轮机构中,基圆的大小会影响 C 。