第4章 Simulink 运动学仿真
- 格式:pdf
- 大小:794.47 KB
- 文档页数:34


Simulink是Simulation和link仿真链接。
是一个附加组件,为用户提供了一个建模与仿真的工作平台,由于许多功能是基于MATLAB平台的。
必须在MATLAB环境中运行,也把他称为一个MATLAB的工具箱。
以前MATLAB仿真编程是在文本窗口中进行的。
输入函数是命令和MATLAB 函数,在simulink 中与用户的交互接口是基于windows的模型化图形输入,用户可以通过单击拖动鼠标的方式绘制和组织系统,并完成对系统的仿真。
因此对于我们来说只需知道这些功能模块的输入输出、功能以及图形界面的使用方法。
就可以用鼠标和键盘进行仿真。
三种方法进入Simulink1、在MATLAB菜单栏中单击FILE,在下拉菜单的NEW选项中单击MODEL.2、在MATLAB工具栏中单击彩色图标,然后在打开的模型库浏览器窗口中单击‘新建文件‘3、在MATLAB命令窗口中输入Simulink,然后在打开的模型库浏览器窗口中单击‘新建文件‘。
一、模块的提取左键拖曳右键add to二、模块的移动放大和缩小移动:左键拖曳选中后用方向键脱离线移动按住shift 然后拖曳缩放 : 点击模块四个角拖曳三、复制粘贴和删除和windows一样删除选择clear四、模块的旋转:右键点击然后选择Flip block 顺时针转180度 rotate block顺时针90度。
五、模块名的修改移动:单击该模块名出现一个小框可以像文本一样修改移动还可以右键单击然后Hide name六、模块参数设置:双击七、模块连接:光标的箭头对准模块的输出端变成+后按下左键拖曳到另一个输入端松开左键。
八、连线的弯折开始画线时,在需要弯折的地方松开鼠标停顿一下,然后继续按下鼠标左键改变方向即可。
移动光标指向要移动的线段,然后拖动鼠标即可删除选中要删除的部分,然后delete直流电动机的直接启动新建一个simulink 仿真平台打开simulink然后点击新建打开simpowersystems的加号在electrical source中选择D C Voltage Source拖曳到仿真平台Elements里面选BreakerConnectors 里面选择Ground output把电源正端接到断路器的1端,电源负端接地。


[研究・设计]收稿日期:2007204209作者简介:赵小刚(1981-),男,陕西户县人,助教,主要研究方向为机械工程CAD CAM 。
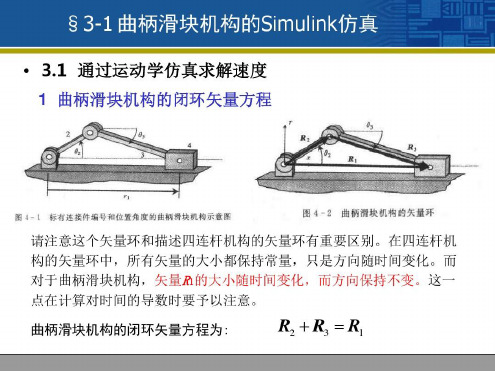
MA TLAB S i m ulink 软件的曲柄导杆机构运动学仿真赵小刚1,李永春2 (1.陕西国防工业职业技术学院机械系,陕西户县 710302; 2.陕西科技大学机电工程学院,陕西西安 710021) 摘 要:为了求解曲柄导杆机构的运动学规律,运用矢量法进行了分析,建立了曲柄导杆机构的运动学数学模型。
使用M A TLAB Si m ulink 仿真软件对曲柄导杆机构进行了运动学仿真,得到了导杆及滑块的位移、速度、加速度的运动曲线。
使用这种方法求解机构的运动学参数具有精度高、速度快等特点。
关 键 词:曲柄导杆机构;运动学;M A TLAB Si m ulink 软件;仿真中图分类号:TH 112;T P 391.9 文献标志码:A 文章编号:100522895(2007)06200392030 引 言曲柄导杆机构是一种应用比较广泛的平面连杆机构,它可以将曲柄的旋转运动转换成为导杆的往复摆动(摆动导杆机构)或整周旋转运动(转动导杆机构)[1]。
曲柄导杆机构还可以与别的基本四杆机构组合在一起,构成一些实用的组合机构,如刨床,车床的主运动机构等。
机构的运动参数是分析评价机构工作性图1 曲柄摆动导杆机构简图能,优化新机构的基本依据[2]。
对曲柄导杆机构的运动分析,即构件上特定点的位移、速度和加速度分析,常用的方法有图解法和解析法。
图解法较直观、方便,但是精度不高,需要反复作图;而解析法人工计算运算量大,容易出错[3]。
本文以曲柄摆动导杆为例,提出用M A TLAB 软件仿真工具箱Si m u link 对曲柄导杆机构进行运动学仿真,得到曲柄导杆机构的运动曲线,该方法使解析法获得更高的精度。
1 曲柄摆动导杆机构运动学数学模型的建立图1所示为一曲柄摆动导杆机构,曲柄OA 为原动件,导杆B A 是从动件,通过滑块,曲柄的连续转动转变为导杆的往复摆动。
实验四 SIMULINK仿真模型的建立及仿真(一)一、实验目的:1、熟悉SIMULINK模型文件的操作。
2、熟悉SIMULINK建模的有关库及示波器的使用。
3、熟悉Simulink仿真模型的建立。
4、掌握用不同的输入、不同的算法、不同的仿真时间的系统仿真。
二、实验内容:1、设计SIMULINK仿真模型。
2、建立SIMULINK结构图仿真模型。
3、了解各模块参数的设定。
4、了解示波器的使用方法。
5、了解参数、算法、仿真时间的设定方法。
例7.1-1 已知质量m=1kg,阻尼b=2N.s/m。
弹簧系数k=100N/m,且质量块的初始位移x(0)=0.05m,其初始速度x’(0)=0m/s,要求创建该系统的SIMULINK 模型,并进行仿真运行。
步骤:1、打开SIMULINK模块库,在MATLAB工作界面的工具条单击SIMULINK图标,或在MATLAB指令窗口中运行simulink,就可引出如图一所示的SIMULINK模块浏览器。
图一:SIMULINK模块浏览器2、新建模型窗,单击SIMULINK模块库浏览器工具条山的新建图标,引出如图二所示的空白模型窗。
图二:已经复制进库模块的新建模型窗3、从模块库复制所需模块到新建模型窗,分别在模块子库中找到所需模块,然后拖进空白模型窗中,如图二。
4、新建模型窗中的模型再复制:按住Ctrl键,用鼠标“点亮并拖拉”积分模块到适当位置,便完成了积分模块的再复制。
5、模块间信号线的连接,使光标靠近模块输出口;待光标变为“单线十字叉”时,按下鼠标左键;移动十字叉,拖出一根“虚连线”;光标与另一个模块输入口靠近到一定程度,单十字变为双十字;放开鼠标左键,“虚连线”变变为带箭头的信号连线。
如图三所示:图三:已构建完成的新模型窗6、根据理论数学模型设置模块参数:①设置增益模块<Gain>参数,双击模型窗重的增益模块<Gain>,引出如图四所示的参数设置窗,把<Gain>增益栏中默认数字改为2,单击[OK]键,完成设置;图四:参数已经修改为2的<Gain>增益模块设置窗②参照以上方法把<Gain1>增益模块的增益系数改为100;③修改求和模块输入口的代数符号,双击求和模块,引出如图五所示的参数设置窗,把符号栏中的默认符号(++)修改成所需的代数符号(--),单击[OK]键,完成设置;图五:改变输入口符号的求和模块参数设置窗④对积分模块<Integrator1>的初始状态进行设置:双击积分模块<Integrator1>,引出如图六所示的参数设置窗,把初始条件Initial condition 栏中的默认0初始修改为题目给定的0.05,单击[OK]键,完成设置。