步进电机步进驱动器原理详细讲解.
- 格式:ppt
- 大小:908.00 KB
- 文档页数:50

四相步进电机驱动程序及工作原理1. 步进电机的工作原理该步进电机为一四相步进电机,采用单极性直流电源供电。
只要对步进电机的各相绕组按合适的时序通电,就能使步进电机步进转动。
图1是该四相反应式步进电机工作原理示意图。
开始时,开关SB接通电源,SA、SC、SD断开,B相磁极与转子0、3号齿对齐,同时,转子的1、4号齿就与C、D相绕组磁极产生错齿,2、5号齿就与D、A相绕组磁极产生错齿。
当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线与1、4号齿之间磁力线的作用,使转子转动,1、4号齿与C相绕组的磁极对齐。
而0、3号齿与A、B相绕组产生错齿,2、5号齿就与A、D相绕组磁极产生错齿。
依次类推,A、B、C、D四相绕组轮流供电,则转子会沿着A、B、C、D方向转动。
四相步进电机按照通电顺序的不同,可分为单四拍、双四拍、八拍三种工作方式。
单四拍与双四拍的步距角相等,但单四拍的转动力矩小。
八拍工作方式的步距角是单四拍与双四拍的一半,因此,八拍工作方式既可以保持较高的转动力矩又可以提高控制精度。
单四拍、双四拍与八拍工作方式的电源通电时序与波形分别如图2.a、b、c所示:驱动电路:程序:大家对照一下程序就知道,本程序采用了八拍工作方式**项目:步进电机正反转(EE01学习板演示程序)**一线工人**网站:电子工程师之家#include <reg52.h>#define uchar unsigned char#define uint unsigned intuchar codeFFW[8]={0xf1,0xf3,0xf2,0xf6,0xf4,0xfc,0xf8,0xf9};uchar code REV[8]={0xf9,0xf8,0xfc,0xf4,0xf6,0xf2,0xf3,0xf1};/* 延时t毫秒/* 11.0592MHz时钟,延时约1msvoid delay(uint t)uint k;while(t--)for(k=0; k<123; k++)/*步进电机正转void motor_ffw(uint n)uchar i;uint j;for (j=0; j<12*n; j++) //转1×n圈for (i=0; i<8; i++) //一个周期转30度P0 = FFW; //取数据delay(15); //调节转速/*步进电机反转void motor_rev(uint n)uchar i;uint j;for (j=0; j<12*n; j++) //转1×n圈for (i=0; i<8; i++) //一个周期转30度P0 = REV; //取数据delay(15); //调节转速* 主程序main()while(1)motor_ffw(5); //电机正转delay(1000); //换向延时motor_rev(5); //电机反转delay(1000); //换向延时。
步进电机驱动器的工作原理步进电机在控制系统中具有广泛的应用。
它可以把脉冲信号转换成角位移,并且可用作电磁制动轮、电磁差分器、或角位移发生器等。
有时从一些旧设备上拆下的步进电机(这种电机一般没有损坏)要改作它用,一般需自己设计驱动器。
本文介绍的就是为从一日本产旧式打印机上拆下的步进电机而设计的驱动器。
本文先介绍该步进电机的工作原理,然后介绍了其驱动器的软、硬件设计。
1. 步进电机的工作原理该步进电机为一四相步进电机,采用单极性直流电源供电。
只要对步进电机的各相绕组按合适的时序通电,就能使步进电机步进转动。
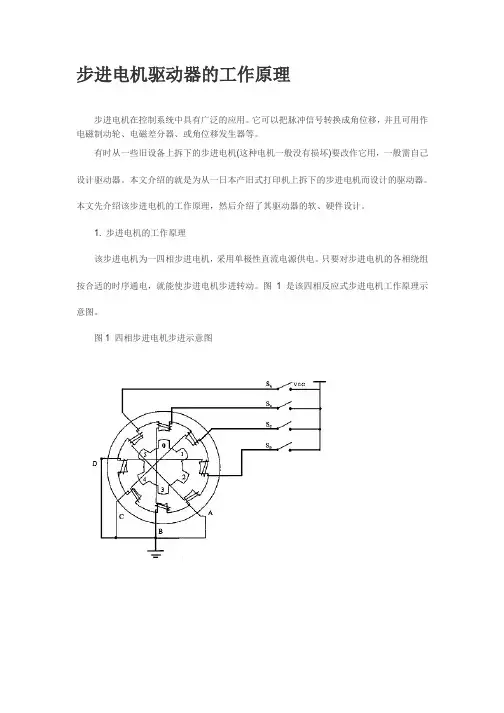
图1是该四相反应式步进电机工作原理示意图。
图1 四相步进电机步进示意图开始时,开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就和C、D相绕组磁极产生错齿,2、5号齿就和D、A相绕组磁极产生错齿。
当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C相绕组的磁极对齐。
而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D相绕组磁极产生错齿。
依次类推,A、B、C、D四相绕组轮流供电,则转子会沿着A、B、C、D方向转动。
四相步进电机按照通电顺序的不同,可分为单四拍、双四拍、八拍三种工作方式。
单四拍与双四拍的步距角相等,但单四拍的转动力矩小。
八拍工作方式的步距角是单四拍与双四拍的一半,因此,八拍工作方式既可以保持较高的转动力矩又可以提高控制精度。
单四拍、双四拍与八拍工作方式的电源通电时序与波形分别如图2.a、b、c所示:图2.步进电机工作时序波形图2.基于AT89C2051的步进电机驱动器系统电路原理图3 步进电机驱动器系统电路原理图AT89C2051将控制脉冲从P1口的P1.4~P1.7输出,经74LS14反相后进入9014,经9014放大后控制光电开关,光电隔离后,由功率管TIP122将脉冲信号进行电压和电流放大,驱动步进电机的各相绕组。
步进电机驱动器的工作原理步进电机在控制系统中具有广泛的应用。
它可以把脉冲信号转换成角位移,并且可用作电磁制动轮、电磁差分器、或角位移发生器等。
有时从一些旧设备上拆下的步进电机(这种电机一般没有损坏)要改作它用,一般需自己设计驱动器。
本文介绍的就是为从一日本产旧式打印机上拆下的步进电机而设计的驱动器。
本文先介绍该步进电机的工作原理,然后介绍了其驱动器的软、硬件设计。
1. 步进电机的工作原理该步进电机为一四相步进电机,采用单极性直流电源供电。
只要对步进电机的各相绕组按合适的时序通电,就能使步进电机步进转动。
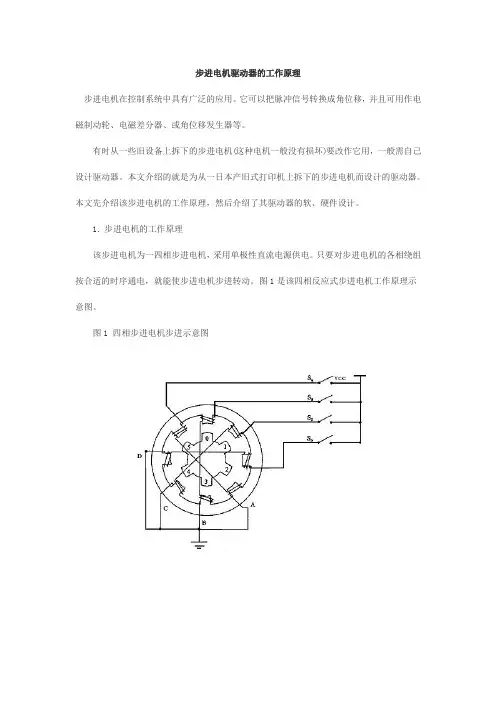
图1是该四相反应式步进电机工作原理示意图。
图1 四相步进电机步进示意图开始时,开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就和C、D相绕组磁极产生错齿,2、5号齿就和D、A相绕组磁极产生错齿。
当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C相绕组的磁极对齐。
而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D相绕组磁极产生错齿。
依次类推,A、B、C、D四相绕组轮流供电,则转子会沿着A、B、C、D方向转动。
四相步进电机按照通电顺序的不同,可分为单四拍、双四拍、八拍三种工作方式。
单四拍与双四拍的步距角相等,但单四拍的转动力矩小。
八拍工作方式的步距角是单四拍与双四拍的一半,因此,八拍工作方式既可以保持较高的转动力矩又可以提高控制精度。
单四拍、双四拍与八拍工作方式的电源通电时序与波形分别如图2.a、b、c所示:图2.步进电机工作时序波形图2.基于AT89C2051的步进电机驱动器系统电路原理图3 步进电机驱动器系统电路原理图AT89C2051将控制脉冲从P1口的P1.4~P1.7输出,经74LS14反相后进入9014,经9014放大后控制光电开关,光电隔离后,由功率管TIP122将脉冲信号进行电压和电流放大,驱动步进电机的各相绕组。
步进驱动器工作原理步进驱动器是一种常见的电机驱动器,它通过控制电流来实现精确的位置控制,适用于需要精准定位的场合。
步进驱动器的工作原理主要包括步进电机、控制器和电源三个部分。
首先,我们来看步进电机的工作原理。
步进电机是一种特殊的电机,它通过将电流按照特定的顺序施加到电机的线圈上,来实现转子的精确旋转。
步进电机的转子是由多个磁极组成的,而定子上的线圈则可以通过控制电流的方向和大小来吸引或者排斥转子上的磁极,从而驱动转子旋转。
步进电机的转子可以根据电流的改变而精确地旋转到预定的位置,因此非常适合需要精准控制的场合。
其次,控制器是步进驱动器的核心部分,它负责控制步进电机的运动。
控制器可以根据外部输入的指令,通过改变电流的方向和大小来驱动步进电机。
控制器通常会根据步进电机的特性和外部指令的要求,生成相应的控制信号,以实现步进电机的精准控制。
通过控制器,我们可以实现步进电机的正转、反转、定位、加减速等功能,从而满足不同场合的需求。
最后,电源是步进驱动器的能量来源,它为步进电机和控制器提供所需的电能。
电源通常会将交流电或直流电转换为步进电机和控制器所需的电流和电压,以确保它们正常工作。
电源的稳定性和电流输出的准确性对步进驱动器的性能有着重要的影响,因此在选择和设计电源时需要特别注意。
综上所述,步进驱动器的工作原理主要包括步进电机、控制器和电源三个部分。
通过控制电流的方向和大小,步进驱动器可以实现精准的位置控制,适用于需要精准定位的场合。
步进驱动器在各种自动化设备和精密仪器中有着广泛的应用,它的工作原理和性能对于设备的稳定性和精度有着重要的影响。
希望通过本文的介绍,读者能对步进驱动器的工作原理有一个更加清晰的认识。
1、步进电机是一种作为控制用的特种电机, 它的旋转是以固定的角度(称为"步距角")一步一步运行的, 其特点是没有积累误差(精度为100%), 所以广泛应用于各种开环控制。
步进电机的运行要有一电子装置进行驱动, 这种装置就是步进电机驱动器, 它是把控制系统发出的脉冲信号转化为步进电机的角位移, 或者说: 控制系统每发一个脉冲信号, 通过驱动器就使步进电机旋转一步距角。
所以步进电机的转速与脉冲信号的频率成正比。
所以,控制步进脉冲信号的频率,可以对电机精确调速;控制步进脉冲的个数,可以对电机精确定位目的;2、步进电机通过细分驱动器的驱动,其步距角变小了,如驱动器工作在10细分状态时,其步距角只为‘电机固有步距角‘的十分之一,也就是说:‘当驱动器工作在不细分的整步状态时,控制系统每发一个步进脉冲,电机转动1.8°;而用细分驱动器工作在10细分状态时,电机只转动了0.18° ‘,这就是细分的基本概念。
细分功能完全是由驱动器靠精确控制电机的相电流所产生,与电机无关。
3、驱动器细分有什么优点,为什么一定建议使用细分功能?驱动器细分后的主要优点为:完全消除了电机的低频振荡。
低频振荡是步进电机(尤其是反应式电机)的固有特性,而细分是消除它的唯一途径,如果您的步进电机有时要在共振区工作(如走圆弧),选择细分驱动器是唯一的选择。
提高了电机的输出转矩。
尤其是对三相反应式电机,其力矩比不细分时提高约30-40% 。
提高了电机的分辨率。
由于减小了步距角、提高了步距的均匀度,‘提高电机的分辨率‘是不言而喻的。
细分的基木概念为:步进电机通过细分驱动器的驱动,其步距角变小了。
如驱动器工作在10细分状态时,其步距角只为‘电机固有步距角’的十分之一,也就是:当驱动器工作在不细分的整步状态时,控制系统每发一个步进脉冲,电机转动1.80;而用细分驱动器工作在10细分状态时,电机只转动了0.180。
简述步进电机的工作原理步进电机是一种特殊的电动机,其运动是由控制信号驱动的,每次控制信号的到来会使电机向前或向后转动一定的角度。
步进电机的工作原理是通过电磁场的变化来实现转动。
本文将从步进电机的结构、原理、分类及应用等方面进行详细阐述。
一、步进电机的结构步进电机由转子和定子两部分组成。
转子是由一组磁极组成,通常有两种类型:永磁转子和电磁转子。
定子是由一组线圈组成,线圈的数目和磁极数目相等。
当通电时,定子线圈中会产生磁场,与磁极相互作用,从而使转子转动。
二、步进电机的原理步进电机的原理是利用电磁场的变化来实现转动。
当定子线圈通电时,会产生磁场,磁场会与转子的磁极相互作用,从而使转子转动。
通常情况下,步进电机是通过控制信号来控制定子线圈的通断,从而实现电机的转动。
控制信号的波形可以是脉冲信号、方波信号等。
三、步进电机的分类步进电机根据其结构和工作原理的不同,可以分为以下几种类型: 1、永磁式步进电机永磁式步进电机的转子由永磁体组成,定子由线圈组成。
当定子线圈通电时,会产生磁场,与永磁体相互作用,从而使转子转动。
永磁式步进电机具有结构简单、工作可靠、转矩大等优点。
2、单相步进电机单相步进电机是一种简单的步进电机,由一组线圈和一个铁芯组成。
当线圈通电时,会产生磁场,与铁芯相互作用,从而使转子转动。
单相步进电机的结构简单,但转矩较小,通常用于一些低功率的应用。
3、双相步进电机双相步进电机是一种常用的步进电机,由两组线圈和一个铁芯组成。
当两组线圈交替通电时,会产生磁场,与铁芯相互作用,从而使转子转动。
双相步进电机具有转矩大、精度高等优点,广泛应用于一些自动化设备中。
4、混合式步进电机混合式步进电机是一种综合了永磁式和电磁式步进电机的特点的电机。
其转子由永磁体和电磁线圈组成,具有转矩大、精度高等优点,广泛应用于一些高精度的自动化设备中。
四、步进电机的应用步进电机具有结构简单、精度高、转矩大等优点,广泛应用于一些自动化设备中。
说明步进电机的工作原理步进电机的工作原理。
步进电机是一种特殊的电机,它通过电脉冲信号来驱动,将电能转化为机械能。
步进电机的工作原理是基于磁场的相互作用和电流的变化,下面将详细介绍步进电机的工作原理。
1. 磁场的相互作用。
步进电机通常由定子和转子两部分组成,定子是由一组线圈组成,而转子则由永磁体或者铁芯组成。
当电流通过定子线圈时,会产生一个磁场,这个磁场会与转子上的永磁体或者铁芯产生相互作用,从而使转子产生转动。
2. 电流的变化。
步进电机的工作原理还涉及到电流的变化。
通过改变定子线圈中的电流方向和大小,可以改变磁场的方向和大小,从而控制转子的转动。
通常情况下,步进电机会通过控制器来控制电流的变化,从而实现精确的步进运动。
3. 步进运动。
步进电机的特点之一就是可以实现精确的步进运动。
这是因为步进电机是按照一定的步进角度来运动的,每接收一个脉冲信号,转子就会向前或者向后运动一个固定的步进角度。
这种特性使得步进电机在需要精确控制位置和速度的应用中非常有用。
4. 工作原理总结。
综上所述,步进电机的工作原理是基于磁场的相互作用和电流的变化。
通过改变定子线圈中的电流方向和大小,可以控制转子的转动,从而实现精确的步进运动。
步进电机因其精准的控制能力和简单的结构,在自动化设备、数控机床、印刷机械等领域得到了广泛的应用。
除了以上介绍的基本工作原理,步进电机还有很多不同的类型和控制方式,例如单相步进电机、双相步进电机、三相步进电机等,每种类型的步进电机都有其特定的工作原理和应用场景。
同时,步进电机的控制方式也有很多种,例如开环控制、闭环控制、微步进控制等,每种控制方式都有其适用的场景和优势。
总之,步进电机是一种非常重要的电机类型,其工作原理基于磁场的相互作用和电流的变化,通过精确的控制来实现步进运动。
步进电机在工业自动化、仪器仪表、医疗设备等领域有着广泛的应用,可以说是现代工业中不可或缺的一部分。
希望通过本文的介绍,读者对步进电机的工作原理有了更深入的了解。
步进驱动器与电机之间的工作原理在现代工业中,步进驱动器与电机之间的工作原理是非常关键的一环,这种电机的特点是在不接触中断这种方式下进行运动控制,由于其精度高、稳定性好、保护机器设备等优点,步进驱动器与电机在各种电子制品中得到了广泛应用。
1、什么是步进驱动器?步进驱动器是一种用于控制步进电机运动的电子装置,它可以将储存的电能转化为电动机所需的电能,控制电机以期望的方式工作。
根据步进电机类型不同,其驱动方式也有所区别。
2、步进电机的原理步进电机是一种电机,其运转方式类似于转盘,走了一步后会再次停止,直到接收到新的指令时继续走下一步。
3、步进电机的驱动方式步进电机的驱动方式有四种:全步进模式、半步进模式、微步进模式和分压模式。
其中,全步进模式是最常用的一种方式,也是最常见的驱动方式。
4、步进电机与步进驱动器的关系步进驱动器的作用是提供步进电机所需的电能,它负责将输入的电流转化为电机所需要的电量,并将其通过电机转化为机械能。
因此,步进驱动器与步进电机之间的关系是相辅相成的,二者共同协同工作才能最终实现质量稳定、运转顺畅的效果。
5、步进驱动器工作原理步进驱动器通过接收微控制器的指令以改变电机的运动状态,其工作原理是将微控制器发送的脉冲电信号转换成电机所需的电力信号,以控制电机的旋转角度。
6、步进驱动器的应用领域目前,步进驱动器已经广泛应用于各种电子制品中,例如电脑打印机、数码相机、家用电器等。
由于步进驱动器所具备的高精度、稳定性好、控制电机运动效果明显等优点,因此在工业自动化控制、医疗器械、科学研究中也得到了应用。
总体来说,步进驱动器与电机之间的工作原理是一个非常关键的技术问题,其应用范围广泛,将为各种领域中的自动化生产和机器控制带来前所未有的发展机遇。
步进电机驱动器参数原理1.电流参数:步进电机驱动器的电流参数是指电机正常工作时所需的驱动电流。
一般来说,步进电机的扭矩和电流成正比,当电流增大时,扭矩也会增大。
步进电机驱动器可以通过电流控制技术来控制电机的运行。
合理设定电流参数可以保证步进电机获得足够的扭矩以完成机械任务。
2.电压参数:电压参数是指步进电机驱动器的最高驱动电压。
一般情况下,步进电机驱动器的输出电压应该小于或等于电机的额定电压,以保证电机工作的安全性和稳定性。
电压参数的设定应该考虑到电机的额定电压以及实际工作情况。
3.细分参数:细分参数是指步进电机驱动器对一个步距角的分割数。
细分参数越高,步进电机在相同的步距角下运动越精细,控制分辨率越高。
细分技术可以提高步进电机的位置控制精度,并减小振动和噪音。
4.步距角参数:步距角参数是指步进电机转动一步所需的脉冲数。
步距角是步进电机最小的工作单位,决定了电机运动的精度和分辨率。
通常步距角可以通过驱动器的输入或者软件进行设置。
5.步进角分辨率参数:步进角分辨率是指步进电机的位置控制精度,可以通过细分技术来提高。
步进角分辨率越高,步进电机运动的精度越高,位置控制越精准。
在步进电机驱动器参数设置的过程中,需要根据具体步进电机的额定工作电压和电流来确定合适的驱动参数。
过高或过低的电压和电流参数都会对步进电机的工作效果产生影响。
总之,步进电机驱动器参数原理是指通过设置电流、电压、细分、步距角和步进角分辨率等参数,来控制步进电机的转动精度和位置控制精度。
通过合理的参数设定,可以实现步进电机的稳定工作和精准控制。
步进电机驱动器的原理
步进电机驱动器是一种控制和驱动步进电机运动的设备。
其工作原理基于步进电机的特性和原理。
步进电机是将电脉冲信号转换为机械转动的设备。
它由固定数量的步进角度组成,每个步进角度都对应电机转子的一个固定位置。
通过给予电机一定的脉冲信号,可以使电机按照指定的角度进行旋转或移动。
步进电机驱动器的主要任务是控制和发送适当的电流和电压信号来驱动步进电机。
它通常由电源模块、电流驱动模块和控制信号输入模块构成。
在驱动过程中,步进电机驱动器通过控制电流的大小和方向来控制步进电机的运动。
电流驱动模块可以根据输入信号调整电流的大小,以满足电机的要求。
同时,控制信号输入模块接收外部控制信号,并根据信号的频率和脉冲数发出相应的驱动信号。
步进电机驱动器可以实现不同的驱动模式,如全步进模式和半步进模式。
全步进模式通过给予电机一个完整的脉冲信号来驱动电机,使其旋转一个步进角度。
而半步进模式则将一个完整的脉冲信号分成两个部分,每个部分对应电机的一个半步进角度。
总之,步进电机驱动器的工作原理是通过控制电流和电压信号,根据输入的控制信号来驱动步进电机进行旋转或移动。
它是步
进电机系统中至关重要的一部分,能够实现精准的位置控制和运动控制。
步进驱动器细分原理步进驱动器是一种用于控制步进电机的装置。
它通过控制电流变化来驱动步进电机,使步进电机按照预定的步进角度进行旋转。
步进驱动器采用细分技术可以提高步进电机的运动精度和平滑性能。
步进电机是一种根据输入的脉冲信号按照一定角度进行旋转的电机。
在正常情况下,步进电机按照每个脉冲信号旋转固定的角度,称为步距角。
然而,步进电机的旋转是离散的,且步距角是固定的。
为了提高步进电机的分辨率和运动平滑性,需要使用细分技术。
步进驱动器的细分原理基于驱动电流的控制。
通常情况下,步进电机的驱动是通过控制电流的大小和方向来实现的。
在细分技术中,步进驱动器会根据输入的细分信号来对电流进行微调。
细分信号是通过将输入脉冲信号进行处理得到的。
最基本的细分方式是将一个脉冲信号细分为两个脉冲信号。
当细分信号的数量增加时,步进电机的运动精度和平滑性也会相应提高。
通常,细分信号的数量是通过设置细分模式来确定的。
步进驱动器的细分原理主要有以下几个方面。
首先,步进驱动器会根据输入的脉冲信号来确定步进电机的转动方向。
根据脉冲信号的正负,驱动器会选择逆时针旋转或顺时针旋转。
其次,步进驱动器会根据细分信号对驱动电流进行微调。
细分信号的数量越多,驱动电流的微调程度越高,从而提高了步进电机的分辨率和平滑性能。
第三,步进驱动器可以通过改变细分模式来调整细分信号的数量。
通常,步进驱动器会提供多种细分模式供用户选择。
用户可以根据具体需求选择合适的细分模式,以实现所需的运动性能。
最后,步进驱动器还可以通过调整驱动电流的大小来控制步进电机的速度。
通常,驱动电流的大小与步进电机的转速呈正比关系。
通过调整驱动电流,可以实现步进电机的加减速运动。
总的来说,步进驱动器的细分原理是通过控制驱动电流的微调来提高步进电机的运动精度和平滑性。
细分信号的数量越多,步进电机的分辨率和平滑性能就越高。
步进驱动器还可以通过改变细分模式和调整驱动电流的大小来实现不同的运动需求。
步进电机步进驱动器原理详细讲解剖析步进电机是一种可以按照指令精确旋转的电机,其精确性和可控性较高,广泛应用于各种自动化设备和机械设备中。
步进电机步进驱动器是控制步进电机旋转的主要组成部分,通过控制步进电机的电流、脉冲信号和驱动方式,实现电机的转动。
步进驱动器的作用步进驱动器的主要作用是将输入的脉冲信号转换成相应的电流,通过改变电流的方向和大小,控制步进电机的转动。
步进驱动器根据输入的脉冲信号来驱动步进电机旋转,脉冲信号的频率和脉冲数决定了步进电机的转速和旋转方向。
步进驱动器的工作原理步进驱动器的工作原理可以简单概括为:接收控制信号,根据信号的脉冲数和脉冲频率,输出相应的电流给步进电机,驱动步进电机的转动。
步进驱动器内部主要包含以下核心组件:1.逻辑控制模块:接收控制信号,根据信号的脉冲数和频率,产生相应的控制信号,用于驱动电流模块和方向模块。
2.电流模块:将逻辑控制模块输出的控制信号转换成相应的电流,通过电流控制步进电机的运行状态。
3.方向模块:根据逻辑控制模块的输出信号,控制步进电机的转动方向。
4.保护模块:用于检测电流和温度等参数,防止步进电机因过流或过热而损坏。
5.脉冲生成器:根据输入的脉冲信号,产生相应的脉冲,用于驱动步进电机。
步进驱动器的工作流程:1.接收输入的脉冲信号:步进驱动器通过接口接收输入的脉冲信号,这些信号经过编码器或控制器生成。
2.根据脉冲信号产生控制信号:逻辑控制模块根据输入的脉冲信号产生相应的控制信号,控制驱动电流和方向。
3.控制电流:电流模块将逻辑控制模块输出的控制信号转换成相应的电流,控制步进电机的运行状态。
4.控制方向:方向模块根据逻辑控制模块的输出信号控制步进电机的转动方向。
5.保护功能:保护模块可以监测电流和温度等参数,当电流过大或温度过高时,及时发出警报或停止电机运行,避免损坏电机。
步进驱动器的特点:1.精度高:步进驱动器可以精确控制步进电机的旋转角度,通常精度可达到0.9°或更低,适用于需要高精度控制的应用场合。