第八章 液压伺服控制系统
- 格式:ppt
- 大小:2.19 MB
- 文档页数:53
1液压传动系统与液压控制系统的异同:同:液压控制技术是在液压传动技术的基础上发展起来的(介质相同、元件大部分相同、遵循的物理规律相同、融合了控制理论) 异:①目的不同(传递动力;对运动量进行精确的控制) ②组成不同(5个组成部分、开环;7个组成部分、闭环)③设计理念不同(以静态参数设计为主;静动态结合,动为主) ④特点不同(有的缺点被放大(对污染的敏感度),有点缺点被消除(传动比))2液压控制系统的工作原理3液压控制系统的组成及作用: ①输入元件:(指令元件)给出输入信号(指令信号)加于系统的输入端。
②反馈测量元件:测量系统的输出并转换为反馈信号。
③比较元件:将反馈信号与输入信号进行比较,给出偏差信号。
④放大转换元件(中枢元件):将偏差信号故大、转换成液压信号(流量或压力)。
⑤执行元件:产生调节动作加于控制对象上,实现调节任务。
⑥控制对象:被控制的机器设备或物体,即负载。
⑦液压能源装置:定压源4液压控制系统的特点 具有负反馈的闭环控制系统优:(1)液压元件的功率—重量比和力矩-惯量比大 可以组成结构紧凑、体积小、重量轻、加速性好的控制系统。
(2)液压动力元件快速性好,系统响应快。
(3)液压控制系统抗负载的刚度大,即输出位移受负载变化的影响小,定位准确,控制精度高。
缺:(1) 液压元件,特别是精密的液压控制元件(如电液伺服阀)抗污染能力差,对工作油液的清洁度要求高。
(2) 油温变化时对系统的性能有很大的影响。
(3) 当液压元件的密封设计、制造相使用维护不当时.容易引起外漏,造成环境污染。
(4) 液压元件制造精度要求高,成本高。
(5) 液压能源的获得和远距离传输都不如电气系统方便。
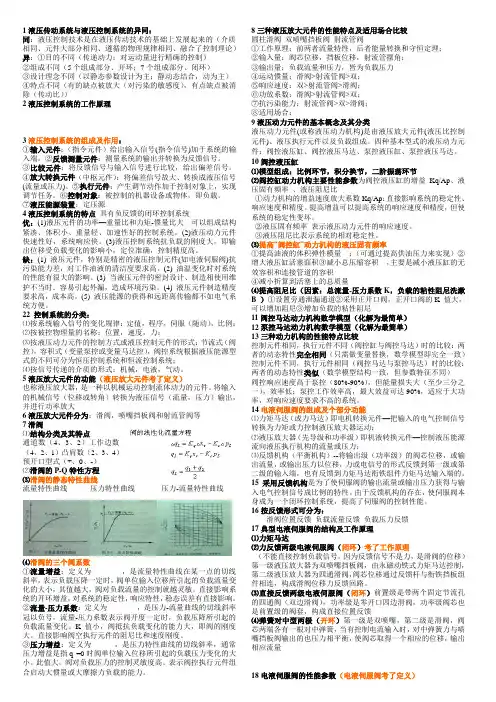
22 控制系统的分类:⑴按系统输入信号的变化规律:定值,程序,伺服(随动),比例; ⑵按被控物理量的名称:位置,速度,力;⑶按液压动力元件的控制方式或液压控制元件的形式:节流式(阀控),容积式(变量泵控或变量马达控),阀控系统根据液压能源型式的不同可分为恒压控制系统和恒流控制系统; ⑷按信号传递的介质的形式:机械,电液,气动。

液压伺服系统液压伺服系统是以高压液体作为驱动源的伺服系统,是使系统的输出量,如位移、速度或力等,能自动地、快速而准确地跟随输入量的变化而变化,与此同时,输出功率被大幅度地放大。
液压伺服系统以其响应速度快、负载刚度大、控制功率大等独特的优点在工业控制中得到了广泛的应用。
一、液压伺服系统的基本组成液压伺服系统无论多么复杂,都是由一些基本元件组成的。
如图就是一个典型的伺服系统,该图表示了各元件在系统中的位置和相互间的关系。
(1)外界能源—为了能用作用力很小的输入信号获得作用力很大的输出信号,就需要外加能源,这样就可以得到力或功率的放大作用。
外界能源可以是机械的、电气的、液压的或它们的组合形式。
(2)液压伺服阀—用以接收输入信号,并控制执行元件的动作。
它具有放大、比较等几种功能,如滑阀等。
(3)执行元件—接收伺服阀传来的信号,产生与输入信号相适应的输出信号,并作用于控制对象上,如液压缸等。
(4)反馈装置—将执行元件的输出信号反过来输入给伺服阀,以便消除原来的误差信号,它构成闭环控制系统。
(5)控制对象—伺服系统所要操纵的对象,它的输出量即为系统的被调量(或被控制量),如机床的工作台、刀架等。
二、液压伺服系统的分类液压伺服系统是由液压动力机构和反馈机构组成的闭环控制系统,分为机械液压伺服系统和电气液压伺服系统(简称电液伺服系统)两类。
电液伺服系统电液伺服系统是一种由电信号处理装置和液压动力机构组成的反馈控制系统。
最常见的有电液位置伺服系统、电液速度控制系统和电液力(或力矩)控制系统。
如图是一个典型的电液位置伺服控制系统。
图中反馈电位器与指令电位器接成桥式电路。
反馈电位器滑臂与控制对象相连,其作用是把控制对象位置的变化转换成电压的变化。
反馈电位器与指令电位器滑臂间的电位差(反映控制对象位置与指令位置的偏差)经放大器放大后,加于电液伺服阀转换为液压信号,以推动液压缸活塞,驱动控制对象向消除偏差方向运动。
当偏差为零时,停止驱动,因而使控制对象的位置总是按指令电位器给定的规律变化。

液压伺服控制笔记摘要:一、液压伺服控制概述1.液压伺服控制定义2.液压伺服控制的应用领域二、液压伺服控制的工作原理1.液压伺服控制的工作原理简介2.液压伺服控制系统的组成三、液压伺服控制的主要性能指标1.精度2.响应速度3.稳定性四、液压伺服控制的关键技术1.液压泵的设计与控制2.液压阀的设计与控制3.传感器的选择与布置五、液压伺服控制的发展趋势1.智能化2.高效节能3.系统集成正文:液压伺服控制是一种利用液压传动技术实现自动化控制的方法,通过对液压系统中的油液流量、压力、温度等参数进行实时监测和调节,从而使液压执行元件按照预定的控制目标进行精确运动。
液压伺服控制在工业、航空、航天、军事等领域具有广泛的应用。
液压伺服控制的工作原理主要是通过液压伺服阀对液压油液的流量和压力进行调节,从而控制液压执行元件的运动速度和位置。
液压伺服控制系统主要由液压伺服阀、液压泵、液压油箱、液压执行元件、传感器和控制器等组成。
其中,液压泵负责产生液压动力,液压伺服阀负责调节液压流量和压力,液压执行元件负责实现运动任务,传感器负责监测系统参数,控制器负责处理信号并发出控制指令。
液压伺服控制的主要性能指标包括精度、响应速度和稳定性。
精度是指液压伺服控制系统的输出与输入之间的偏差,它反映了系统的测量和控制能力;响应速度是指液压伺服控制系统对输入信号的响应速度,它反映了系统的快速性和灵敏性;稳定性是指液压伺服控制系统在长时间运行过程中保持稳定运行的能力,它反映了系统的可靠性和稳定性。
液压伺服控制的关键技术包括液压泵的设计与控制、液压阀的设计与控制以及传感器的选择与布置。
液压泵的设计与控制是保证系统精度和稳定性的重要环节,需要根据控制要求合理选择泵的类型和参数;液压阀的设计与控制是实现流量和压力调节的关键,需要根据控制算法设计合适的阀门结构和控制系统;传感器的选择与布置是保证系统实时监测和调节的重要手段,需要根据控制需求合理选择传感器的类型和数量。
液压伺服工作原理
液压伺服系统是通过液压原理实现精确控制的一种机电装置。
其工作原理如下:
1. 液压伺服系统由液压泵、液压缸、控制阀和传感器等组成。
液压泵通过机械能输入,将机械能转化为流体能。
2. 液压泵将流体送入控制阀,控制阀通过调节液压流量和压力来控制流体的输出。
控制阀是系统的核心部件,它根据传感器信号和预设的控制要求,将流量和压力分配到液压缸上。
3. 传感器用于感知被控对象的实际状态,并将状态信息反馈给控制阀。
控制阀根据传感器的反馈信号,调整液压流量和压力,使得被控对象达到期望的位置、速度或力。
4. 液压流体进入液压缸,通过液压缸的活塞运动,产生线性位移或输出力。
液压缸的活塞由流体推动,通过活塞杆连接到被控对象,将控制信号转化为机械运动。
5. 当被控对象达到期望状态时,传感器感知到的状态信息与控制阀预设的控制要求相符,控制阀停止调节。
通过以上原理,液压伺服系统实现了对机械运动的精确控制。
其优点包括高承载能力、动态响应快、可靠性高、结构简单等。
在工业自动化领域广泛应用,例如数控机床、起重设备、注塑机等。
理科独⽴重复试验、条件概率24条件概率、独⽴事件、独⽴重复试验【知识要点】1.条件概率:对于任何两个事件A 和B ,在已知事件A 发⽣的条件下,事件B 发⽣的概率叫做条件概率,⽤符号P (B |A )来表⽰,其公式为P (B |A )=P (AB )P (A ). 2.条件概率具有的性质:①0≤P (B |A )≤1;②如果B 和C 是两互斥事件,则P (B ∪C |A )=P (B |A )+P (C |A ).3.计算条件概率有两种⽅法.(1)利⽤定义P (B |A )=P (AB )P (A );(2)若n (C )表⽰试验中事件C 包含的基本事件的个数,则P (B |A )=n (AB )n (A )4.相互独⽴事件:对于事件A 、B ,若A 的发⽣与B 的发⽣互不影响,则称A 、B 是相互独⽴事件.5. 相互独⽴事件同时发⽣概率(1)P (AB )=P (A )·P (B ).(2)若A 与B 相互独⽴,则A 与B ,A 与B ,A 与B 也都相互独⽴.6.独⽴重复试验独⽴重复试验是指在相同条件下可重复进⾏的,各次之间相互独⽴的⼀种试验,在这种试验中每⼀次试验只有两种结果,即要么发⽣,要么不发⽣,且任何⼀次试验中发⽣的概率都是⼀样的.7.⼆项分布在n 次独⽴重复试验中,设事件A 发⽣的次数为k ,在每次试验中事件A 发⽣的概率为p ,那么在n 次独⽴重复试验中,事件A 恰好发⽣k 次的概率为P (X =k )=C k n p k (1-p )n -k (k =0,1,2,…,n ),此时称随机变量X 服从⼆项分布,记作X ~B (n ,p ),并称p 为成功概率.题型⼀:条件概率1.把⼀枚硬币连续抛两次,记“第⼀次出现正⾯”为事件A ,“第⼆次出现正⾯”为事件B ,则P (B |A )等于( ).A.12B.14C.16D.182.(2011·辽宁)从1,2,3,4,5中任取2个不同的数,事件A =“取到的2个数之和为偶数”,事件B =“取到的2个数均为偶数”,则P (B |A )等于( ).A.18B.14C.25D.123.某地区空⽓质量监测资料表明,⼀天的空⽓质量为优良学科⽹的概率是0.75,连续两为优良的概率是0.6,已知某天的空⽓质量为优良,则随后⼀天的空⽓质量为优良的概率是()A. 0.8B. 0.75C. 0.6D. 0.454.袋中有6个黄⾊、4个⽩⾊的乒乓球,作不放回抽样,每次任取⼀球,取2次,求(1在第⼀次取到⽩球的条件下,第⼆次取到黄⾊球的概率;(2第⼆次才取到黄⾊球的概率。
液压伺服系统工作原理液压伺服系统是一种将液压动力与伺服控制技术结合的控制系统。
它利用液压的优势来实现高速、高精度的运动控制。
液压伺服系统主要由液压源、执行元件、控制元件和传感器组成,通过控制元件对液压信号进行调节,驱动执行元件实现系统的动作。
液压伺服系统的工作原理基于液压传动的基本原理——泵的机械能转化为液压能的过程。
液压伺服系统通过泵将液体压力能转化为动能,然后通过执行元件将液压能转化为机械能,从而实现工作目标。
液压伺服系统使用液体作为工作介质,通过控制元件对液压信号进行调节,控制执行元件的动作。
在液压伺服系统中,常用的液体是油。
油的粘度和压力是影响液压系统工作效果的重要因素。
粘度越大,液压系统的动能传递效率越高。
而压力的大小则取决于工作要求,压力过大或过小都会影响系统的工作效果。
液压伺服系统中的泵是其核心部件,它负责将机械能转化为液压能。
在液压伺服系统中,常用的泵有齿轮泵、液压柱塞泵和叶片泵等。
泵通过提供压力将液体推送到执行元件中,从而实现系统的工作。
执行元件是液压伺服系统的执行部件,它将液压能转化为机械能,实现系统的运动。
常见的执行元件有液压缸和液压马达。
液压缸通过液体的力学效应来实现工作,而液压马达则通过液体的动力效应来实现工作。
执行元件的选择取决于具体的工作要求和系统性能。
控制元件是液压伺服系统中起控制作用的部件,它根据输入信号来控制和调节液压信号的大小和方向,从而实现对执行元件的控制。
常见的控制元件有阀门和流量分配器。
阀门负责控制和调节液体的流量和压力,而流量分配器则负责实现对液体流向的控制。
传感器是液压伺服系统中起反馈作用的部件,它通过感知系统的工作状态来提供反馈信号,从而实现对系统的控制。
常见的传感器有位置传感器和压力传感器。
位置传感器用于测量执行元件的位置,而压力传感器则用于测量液压系统的压力。
综上所述,液压伺服系统是一种将液压动力与伺服控制技术结合的控制系统。
它通过泵将机械能转化为液压能,然后通过控制元件对液压信号进行调节,驱动执行元件实现系统的动作。
液压伺服系统工作原理1.1 液压伺服系统工作原理液压伺服系统以其响应速度快、负载刚度大、控制功率大等独特的优点在工业控制中得到了广泛的应用。
电液伺服系统通过使用电液伺服阀,将小功率的电信号转换为大功率的液压动力,从而实现了一些重型机械设备的伺服控制。
液压伺服系统是使系统的输出量,如位移、速度或力等,能自动地、快速而准确地跟随输入量的变化而变化,与此同时,输出功率被大幅度地放大。
液压伺服系统的工作原理可由图1来说明。
图1所示为一个对管道流量进行连续控制的电液伺服系统。
在大口径流体管道1中,阀板2的转角θ变化会产生节流作用而起到调节流量qT的作用。
阀板转动由液压缸带动齿轮、齿条来实现。
这个系统的输入量是电位器5的给定值x i。
对应给定值x i,有一定的电压输给放大器7,放大器将电压信号转换为电流信号加到伺服阀的电磁线圈上,使阀芯相应地产生一定的开口量x v。
阀开口x v使液压油进入液压缸上腔,推动液压缸向下移动。
液压缸下腔的油液则经伺服阀流回油箱。
液压缸的向下移动,使齿轮、齿条带动阀板产生偏转。
同时,液压缸活塞杆也带动电位器6的触点下移x p。
当x p所对应的电压与x i所对应的电压相等时,两电压之差为零。
这时,放大器的输出电流亦为零,伺服阀关闭,液压缸带动的阀板停在相应的qT位置。
图1 管道流量(或静压力)的电液伺服系统1—流体管道;2—阀板;3—齿轮、齿条;4—液压缸;5—给定电位器;6—流量传感电位器;7—放大器;8—电液伺服阀在控制系统中,将被控制对象的输出信号回输到系统的输入端,并与给定值进行比较而形成偏差信号以产生对被控对象的控制作用,这种控制形式称之为反馈控制。
反馈信号与给定信号符号相反,即总是形成差值,这种反馈称之为负反馈。
用负反馈产生的偏差信号进行调节,是反馈控制的基本特征。
而对图1所示的实例中,电位器6就是反馈装置,偏差信号就是给定信号电压与反馈信号电压在放大器输入端产生的△u。
液压伺服控制系统的仿真与优化液压伺服控制系统是一种利用液压传动执行器,通过对液压流体的控制实现对执行器的控制的一种系统,具有响应快、可承受大负载、控制稳定等优点。
液压伺服控制系统在各个领域中广泛应用,如机械加工、汽车制造、航空航天等。
随着科学技术的发展,液压伺服控制系统的仿真与优化已经成为了一个研究热点。
一、液压伺服控制系统的概念液压伺服控制系统是一个以液压控制元件为核心的系统,它由执行元件、控制元件、传动元件、气源及配套元件五部分组成。
执行元件是指执行机构,像油缸、液压电动推杆等。
控制元件是控制执行机构动作的元器件,这些元器件可以控制流量、压力和方向等。
传动元件是将动力传递给执行元件的一种元件,适用于液压传动的全过程。
二、液压伺服控制系统的仿真技术液压伺服控制系统的仿真技术可以根据液压传动的原理和组件来模拟系统的性能。
模拟涉及到数学方程、物理参数和系统结构等知识。
仿真技术可以让我们在不同情况下测试液压伺服控制系统,如高负荷、高速运动、变化的压力需求和不同的液体介质等。
基于仿真技术,我们可以精确预测系统的性能,便于在设计过程中提升系统的效率和减少成本。
利用数值仿真技术,能够有效缩短系统设计周期,提高设备的可靠性和精度。
三、液压伺服控制系统的优化液压伺服控制系统的优化是在传统系统设定的基础上进行的,以期能够进一步提高系统的性能和可靠性、缩小误差。
优化目标包括系统的平稳性、控制精度、响应时间、寿命或经济成本等。
液压传动系统是一个多参量、多变量的非线性复杂系统,维护和优化难度大。
在实际系统领域应用中,不同需求、不同系统、不同条件,需要不同的优化策略。
近年来,有很多研究和实践进行了深入探索,反馈控制、神经网络控制、遗传算法、模糊控制等方法均被应用到液压伺服控制系统的优化中。
四、结语液压伺服控制系统的仿真和优化,对于提高液压传动设备的性能和优越性有着非常重要的意义。
仿真技术可以让我们对系统的性能、稳定性、效率等因素进行预测和评估,为设计优化提供指导。
液压伺服控制笔记【最新版】目录一、液压伺服控制的概述二、液压伺服控制的原理三、液压伺服控制的组成部件四、液压伺服控制的应用实例五、液压伺服控制的优点与局限性正文一、液压伺服控制的概述液压伺服控制是一种以液压作为动力来源,通过电气信号来实现对液压执行元件运动速度、位置和力的控制的技术。
它广泛应用于各种工业设备、机床和自动化生产线等领域,以实现高精度、高速度和高效率的生产过程。
二、液压伺服控制的原理液压伺服控制的原理主要基于液压传动与电气信号的结合。
通过电气信号的变化,调节液压油的流量、压力和流向,从而实现对液压执行元件的运动速度、位置和力的控制。
其控制过程主要分为以下几个步骤:1.根据控制需求,发出电气信号;2.电气信号经过控制器处理,转换为液压系统的控制信号;3.控制信号作用在液压元件上,改变液压油的流量、压力和流向;4.液压油的变化使得液压执行元件实现预期的运动速度、位置和力。
三、液压伺服控制的组成部件液压伺服控制系统主要由以下几个部分组成:1.控制器:负责接收电气信号,并转换为液压系统的控制信号;2.伺服阀:负责根据控制信号,调节液压油的流量、压力和流向;3.液压油缸或马达:负责将液压油的能量转换为机械能,实现对执行元件的运动控制;4.传感器:负责检测液压执行元件的位置、速度等信息,并将其反馈给控制器;5.执行元件:负责根据液压油的控制,实现预期的运动速度、位置和力。
四、液压伺服控制的应用实例液压伺服控制在各种工业设备、机床和自动化生产线等领域有广泛的应用。
例如,在数控机床上,液压伺服控制可以实现对刀具的精确快速定位,提高加工精度和效率;在自动化生产线上,液压伺服控制可以实现对机器人的精确控制,提高生产过程的自动化程度。
五、液压伺服控制的优点与局限性液压伺服控制的优点主要体现在以下几个方面:1.控制精度高:液压伺服控制系统能够实现微米级的控制精度,满足高精度加工的需求;2.响应速度快:液压伺服控制系统的响应速度较快,能够实现高速、高加速度的运动;3.结构简单:液压伺服控制系统的结构相对简单,易于维护和调试;4.适应性强:液压伺服控制系统能够适应各种恶劣的工作环境,具有较强的抗干扰能力。