液压伺服系统控制PPT
- 格式:ppt
- 大小:6.80 MB
- 文档页数:43




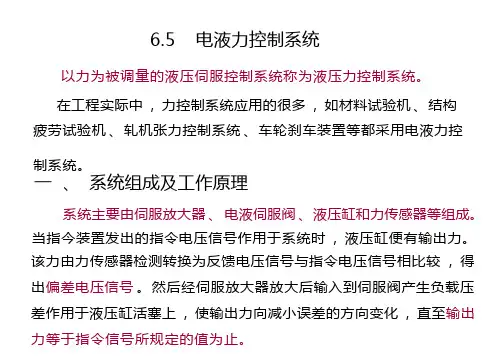
收稿日期:2004-08-29作者简介:王野牧(1965-),男,副教授,辽宁本溪人,硕士.文章编号:1000-1646(2005)01-0005-04液压伺服控制系统课件王野牧,李天阳,韦 茵(沈阳工业大学机械工程学院,沈阳110023)摘 要:在液压伺服控制系统及控制工程中经常会遇到一些重要概念、定义及术语,可以通过实验教学加以理解,但所使用的设备、仪器数量、时间及复杂程度都将是惊人的,在教学时间内几乎不可能完成.为此,介绍了由伺服阀控制对称液压缸和位移传感器构成的液压位置闭环控制系统及其工作原理,给出了该系统的频率特性及动态响应数学表达式.以V ISU AL BASIC为开发工具,开发出了适用于液压伺服控制系统及控制工程基础课程的教学课件.关 键 词:伺服阀;对称液压缸;控制工程;频率特性;动态响应中图分类号:T P271 31 文献标识码:ACAI for hydraulic servo control systemWANG Ye-mu,LI Tian-yang,WEI Yin(School of M echanical Engineer ing,Shenyang U niversity of T echnology,Sheny ang110023,China)Abstract:For hydraulic servo control system and control engineering,many im portant concepts,definitions and items met from time to time can be understood through ex periment teaching.How ever,the quantity of instrument,time spent and the complexity w ould be astonishing,w hich can not be completed in predeter-m ined teaching hours.In this paper,the domination principle of the hydraulic position closed-loop system consisted of the position sensor and symmetrical hydraulic cylinder controlled by the servo valve is intro-duced.The m athematical models of frequency characteristics and dynamic response of the system are dis-cussed.With V isual Basic Language,the CAI suitable for the hydraulic servo control system and the control eng ineering foundation is developed.Key words:servo valve;symmetrical hydraulic cylinder;control engineering;frequency characteristics;dynamic response在液压伺服控制系统及控制工程基础课程的教学过程中由始至终都会遇到一些重要的概念、定义及术语,如开环系统、闭环系统、反馈、偏差、稳定性、频率特性、频宽、动态响应、误差等,这些都是一些比较抽象的概念,学生不容易理解和掌握.可以通过实验教学来加深理解,但受实验条件所限,有些项目无法完成.而且,由于实验教学的集中性,课堂教学中无法及时地、有针对性地、形象地进行讲解,使得教学效果不理想.利用MAT-LAB中动态仿真工具SIMU LINK软件包,也可以帮助学生理解上述概念,但对于一点基础没有的学生来讲,仍嫌不够直观、难于理解.液压伺服位置闭环控制系统是一种非常典型的闭环控制系统,在生产实际中得到了广泛的应用,利用V I-SUAL BASIC通过软件来直观的显示它的组成、工作原理,并在数学模型的基础上,通过可视化的动画方式来直观、灵活、随意地在教学中演示一些重要的过程及参数[1],可有效地提高教学质量.1 课件所用控制系统的物理模型及工作原理图1是一个由伺服阀或比例阀所构成的闭环位置控制系统.U i为输入的电压信号;U f为由位移传感器构成的反馈信号.当U i增加时U i与U f 的偏差信号就会增加,使得3的输出力增加,这样第27卷第1期2005年2月沈 阳 工 业 大 学 学 报Journal of Shenyang University of TechnologyVol 27No 1Feb.2005就会推动4向左侧移动,高压油P s 就会经过阀输出到油缸的左腔,推动油缸向右侧运动,油缸向右侧的运动使得位移传感器1的输出电压U f 增加,U i 与U f 的偏差值就会随之减小直到零为止(无负载时),这样油缸就会在右侧新的位置上停止.如果U i 减小,响应过程与上述过程相反.当输入信号为等幅变频的周期性正弦时,油缸位移的稳态输出值随角频率的变化情况即为频率特性.当输入信号为单位阶跃信号时,油缸位移的瞬态输出随时间的变化情况即为动态响应特性.可通过可视化的油缸运动表现来描述上述两种特性.图1 液压系统模型图F ig.1 M odel of the hydraulic control system 1位移传感器 2双作用对称液压缸的活塞杆 3力马达或比例电磁铁 4伺服阀或比例阀 5电液伺服阀或电液比例阀控制器2 课件所用控制系统的数学模型将图1所示控制系统线性化,可得控制系统传递函数框图,如图2.图2 控制系统传递函数框图Fig.2 T ransfer function of the hydraulic contro l system其中:K a 伺服阀放大器放大倍数;K sv 伺服阀的电流-位移增益;K q 伺服阀流量增益;A p 油缸有效作用面积;W n 无阻尼固有频率;S n 阻尼比;K f 位移传感器放大倍数.根据上边的闭环传递函数框图可得闭环传递函数为[2]G (S )=K vS 3W 2n+2S n W n S 2+S +K v K f(1)其中:K v =K a K sv K qA p这样就可根据频率特性的定义求出闭环幅频特性和闭环相频特性.对应不同的角频率求出不同的幅值衰减量和相位滞后值.将这些数据保存到数组中,作为可视化显示频率特性的数据.将式(1)化成状态方程,利用四阶龙格-库塔法解微分方程组,可得出系统在单位阶跃信号输入下的动态响应数据,将这些数据保存到数组中,作为可视化显示动态响应特性的数据[3].3 课件主要功能简介1)演示说明开环、闭环系统图3为控制系统具有闭环检测回路时(闭环生效时)的一个稳态工作点[4].图3所示的状态为输入电压3V 时的油缸位置,当输入电压不同时可以很明确地看出油缸的位置不同.通过这个界面可以很好地理解位置控制系统的实质及其在生产实际中的具体表现.另外,通过观察阀口开度的变化情况,可以说明偏差控制系统的实质,以及控制系统的主反馈为什么一定是负反馈.图3 闭环状态演示界面Fig.3 Demonstration interface of the closed -loop hy -draulic system图4为反馈回路失效时的控制系统表现状态.当反馈不存在时,油缸只能停留在其两端,系统将不再是位置控制系统,将变成一个无反馈的开环控制系统,无法控制油缸的位置.这种现象也6 沈 阳 工 业 大 学 学 报第27卷正是生产实际中检测回路失效时的一种表现[5].图4 反馈回路失效时状态演示界面Fig.4 Demonstration interface of the hydraulic systemfor the failure mode of feedback loop2)演示说明频率特性图5为频率特性演示界面.讲明频率特性的实质和含义一直是教学过程中的一个难点,通过这个界面可以充分地演示说明频率特性的实质.当输入信号为等幅变频的周期性正弦时,油缸位移的稳态输出值可以通过动画及曲线同时显示在该界面中.选择输入不同的角频率值可以明显地看出油缸输出位移变化的幅值衰减情况及相位滞后情况[6],将输入电压信号与输出的位移信号同时在右侧的PICTURE 框中显示将更有利于观察这一点.另外,软件具有选择显示速度及步长的功能[7],可以通过 慢镜头 进一步进行演示及讲解.界面中右下脚PICTURE 框中显示的是真实坐标下的频率特性曲线[8],而没有采用控制工程中常用的对数坐标,这样将更加有利于理解两种坐标的区别,容易说明对数坐标的实质、含义及优点.图5 频率特性演示界面Fig.5 Demonstration interface of frequency char acteristics3)演示说明动态响应特性图6为动态响应特性演示界面.当输入信号为单位阶跃信号时,油缸位移的瞬态输出通过动画及曲线同时显示在该界面中.当改变控制系统的开环放大倍数时,控制系统的输出将会有所不同,可以明显、直观地看出输出量振荡次数的增多及调整时间的加长,开环放大倍数增加到一定程度,控制系统将不稳定[8].另外,将闭环系统中其它几个重要参数的变化情况(如阀口开度、油缸前腔压力、油缸后腔压力、反馈电压等),也都同时显示在界面中,有利于理解闭环系统中信号的转换、传递、放大等过程.该界面同样具有选择显示速度及步长的功能,以利于演示及观察.该课件中所涉及到的不同的曲线均采用不同的颜色绘制,油缸前、后腔的颜色也随着压力的不同而动态变化,以便更生动的感受信号及参数的变化情况.图6 动态响应特性演示界面F ig.6 Demonstration inter face o f dynamic respo nse4 结 论该课件可以很直观、方便地演示几乎所有在控制工程中所涉及到的重要过程,进而通过它更容易、方便地理解和掌握控制理论中的重要思想.它的演示过程与做实验比较具有明显的优势,它更加灵活、方便、重复使用性强,如果将课件中的功能完全由真实实验来完成,所使用的设备、仪器数量、时间、消耗、复杂程度将都是非常惊人的,在教学时间内几乎不可能完成.控制理论中所涉及到的重要概念和思想几乎分布在课程的各处,可以随时利用该课件进行演示和讲解,这必将给教学质量的提高带来很大的益处.7第1期王野牧等:液压伺服控制系统课件参考文献:[1]吴昌平.Visual Basic6.0程序设计[M].北京:人民邮电出版社,2002.(Wu C P.V isual Basic6.0progr amming[M].Beijing: Posts&T elecom Press,2002.)[2]王春行.液压控制系统[M].北京:机械工业出版社,2004.(Wang C X.Hydraulic control system[M].Beijing: China M achine Press,2004.)[3]何光渝.V ISUA L BASIC常用数值算法[M].北京:科学出版社,2002.(He G Y.G eneral numerical v alue algor ithm on V isual Basic languag e[M].Beijing:Science Press,2002.) [4]成大先.机械设计手册 液压控制[M].北京:化学工业出版社,2004.(Cheng D X.T he handbook of machine design-hydraulic contro l[M].Beijing:Chemical Industry Pr ess,2004.)[5]江小霞,卢长耿,钟荣龙.液压控制系统的动态测试系统[J].液压与气动,2002(11):29-31.(Jiang X X,Lu C G,Zhong R L.Dynamic test system of hydraulic control system[J].Chinese Hy draulics& P neumatics,2002(11):29-31.)[6]Guo H B,L i H R.Study on the characterist ics of thesing le rod hydr aulic cylinder controlled by asymmetric valv e[A].Pr oc.of ISFP[C].W uhan,China,IA PW-PC,2003:477-482.[7]黄晓东,聂继方.电液伺服阀特性计算机辅助测试系统[J].机床与液压,2003,5:187-189.(Huang X D,N ie J F.T he CAT system for t he feature of electro hy draulic servo valve[J].M achine T ool and Hydraulic,2003(5):187-189.)[8]王栋梁,李洪人.阀控液压缸伺服系统的键图分析[J].济南大学学报,2002(12):355-358.(Wang D L,L I H R.Bond g raph analysis on the valve contr olling servo system[J].Jour nal of Jinan U nivers-i ty,2002(12):355-358.)(责任编辑:邓美艳 英文审校:王世杰)待发表文章摘要预报移动机器人数学模型的近似线性化及状态反馈镇定研究姜 勇1,孙茂相1,董再励2(1 沈阳工业大学信息科学与工程学院,沈阳110023;2 中国科学院沈阳自动化研究所机器人学重点实验室,沈阳110016)摘 要:针对机器人控制领域中一类多输入多输出(MIM O)仿射非线性系统,提出了一种基于平衡流形的近似线性化状态反馈镇定算法,并用此算法解决了一类完整约束轮式移动机器人(WMR)的镇定问题.仿真分析表明,此方法不仅能够实现系统的镇定,而且降低了因平衡工作点变动给系统稳定性带来的影响,同时也大大地简化了对非线性系统的综合设计过程,具有良好的控制效果和实用性.8 沈 阳 工 业 大 学 学 报第27卷。