【免费下载】六点定位原则及定位基准的选择
- 格式:pdf
- 大小:452.61 KB
- 文档页数:6
第三节工艺规程的拟定为保证产品质量,提高生产效率和经济效益,把根据具体生产条件拟定的较合理的工艺过程,用图表(或文字)的形式写成文件,就是工艺规程。
它是生产准备、生产计划、生产组织、实际加工及技术检验等的重要技术文件,是进行生产活动的基础资料。
根据生产过程中工艺性质的不同,又可以分为毛坯制造、机械加工、热处理及装配等不同的工艺规程。
本节仅介绍拟定机械加工工艺规程的一些基本问题。
一零件的工艺分析首先要熟悉整个产品(如整台机器)的用途、性能和工作条件,结合装配图了解零件在产品中的位置、作用、装配关系以及其精度等技术要求对产品质量和使用性能的影响。
然后从加工的角度,对零件进行工艺分析,主要内容如下:(1)检查零件的图纸是否完整和正确例如视图是否足够、正确,所标注的尺寸、公差、粗糙度和技术要求等是否齐全、合理。
并要分析零件主要表面的精度、表面质量和技术要求等在现有的生产条件下能否达到,以便采取适当的措施。
(2)审查零件材料的选抒是否恰当零件材料的选择应立足于国内,尽量采用我国资源丰富的材料,不要轻意地选用贵重材料。
另外还要分析所选的材料会不会使工艺变得困难和复杂。
(3)审查零件结构的工艺性零件的结构是否符合工艺性一般原则的要求,现有生产条件下能否经济地、高效地、合格地加工出来;如果发现有问题,应与有关设计人员共同研究,按规定程序对原图纸进行必要的修改与补充。
二毛坯的选择及加工余量的确定毛坯上留作加工用的材料层,称为加工余量。
加工余量又有总余量和工序余量之分。
某一表面从毛坯到最后成品切除掉的总金属层厚度,即毛坯尺寸与零件设计尺寸之差称为总余量,以Z0表示。
该表面每道工序切除掉的金属层厚度,即相邻两工序尺寸之差称为工序余量.工序尺寸公差一般按"入体原则"标注,对被包容尺寸(轴径),上偏差为0,其最大尺寸就是基本尺寸;对包容尺寸 (孔径、槽宽),下偏差为0,其最小尺寸就是基本尺寸。
加工余量的确定确定加工余量有计算法、查表法和经验估计法等三种方法:(1)计算法在掌握影响加工余量的各种因素具体数据的条件下,用计算法确定加工余量比较科学。
六点定位原则
六点定位原则(Six-point positioning principle)是指在视觉传播中为了更直观地传达信息,需要将视觉要素放置在画面的特定位置上,六个主要的定位原则如下:
1. 顶点定位(Vertex positioning):将主体放置在画面的顶点位置上,使之成为画面的焦点。
这种定位方式可以吸引观众的注意力,并突出主题。
2. 对称定位(Symmetrical positioning):通过将要素放在画面的对称位置上,创造出平衡和稳定感。
这种定位方式能够传递出一种和谐与和平的感觉。
3. 边缘定位(Edge positioning):将要素放置在画面的边缘位置上,可以创造出一种张力和独特感。
这种定位方式能够吸引观众的注意力,并突出画面的边缘特性。
4. 分隔定位(Separation positioning):通过将要素放置在画面的不同区块上,创造出一种分割和对比感。
这种定位方式可以突出不同要素之间的关系,并加强视觉效果。
5. 居中定位(Centrality positioning):将要素放置在画面的中央位置上,创造出一种稳定和集中的感觉。
这种定位方式能够使观众的目光集中在画面的中央,同时强调主题。
6. 对角定位(Diagonal positioning):通过将要素放置在画面的对角位置上,创造出一种动感和紧张感。
这种定位方式能够使画面更有层次感,并引起观众的兴趣。
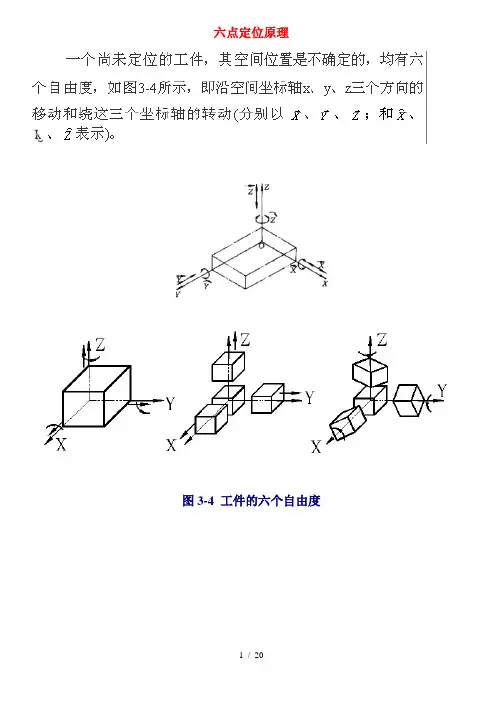
六点定位原理图3-4 工件的六个自由度图3-5 长方体形工件的定位一、六点定位原则一个尚未定位的工件,其位置是不确定的。
如图 3-29 所示,将未定位的的工件(长方体)放在空间直角坐标系中,长方体可以沿 X 、 Y 、 Z 轴移动有不同的位置,也可以绕 X 、 Y 、 X 轴转动有不同的位置,分别用、、和、、表示。
用以描述工件位置不确定性的、、、、、合称为工件的六个自由度。
其中、、称为工件沿 X 、 Y 、 Z 轴的移动自由度,、、称为工件绕 X 、 Y 、 Z 轴的转动自由度。
工件要正确定位首先要限制工件的自由度。
设空间有一固定点,长方体的底面与该点保持接触,那么长方体沿 Z 轴的移动自由度即被限制了。
如果按图 3-30 所设置六个固定点,长方体的三个面分别与这些点保持接触,长方体的六个自由度均被限制。
其中 XOY 平面上的呈三角形分布的三点限制了、、三个自由度; YOZ 平面内的水平放置的两个点,限制了、二个自由度; XOZ 平面内的一点,限制了一个自由度。
限制三个或三个以上自由度的称为主要定位基准。
这种用适当分布的六个支承点限制工件六个自由度的原则称为六点定位原则。
支承点的分布必须适当,否则六个支承点限制不了工件的六个自由度。
例图 3-30 中XOY 平面内的三点不应在一直线上,同理, YOZ 平面内的两点不应垂直布置。
六点定位原则是工件定位的基本法则,用于实际生产时起支承作用的是有一定形状的几何体,这些用于限制工件自由度的几何体即为定位元件。
表 3-10 为常用定位元件能限制的工件自由度。
二、由工件加工要求确定工件应限制的自由度数工件定位时,影响加工精度要求的自由度必须限制;不影响加工精度要求的自由度可以限制也可以不限制,视具体情况而定。
按照工件加工要求确定工件必须限制的自由度是工件定位中应解决的首要问题。
例如图 3-31 所示为加工压板导向槽的示例。
由于要求槽深方向的尺寸 A 2 ,故要求限制 Z 方向的移动自由度;由于要求槽底面与 C 面平行,故绕 X 轴的转动自由度和绕 Y 轴的转动自由度要限制;由于要保证槽长 A 1 ,故在 X 方向的移动自由度要限制;由于导向槽要在压板的中心,与长圆孔一致,故在 Y 方向的移动自由度和绕 Z 轴的转动自由度要限制。

简述六点定位原理六点定位原理是一种基于地理坐标的定位方法,常用于导航系统和地图应用中。
该原理通过收集多个位置信息,并利用数学计算方法确定用户的具体位置。
下面将简述六点定位原理及其相关参考内容。
1. GPS定位GPS(全球定位系统)是一种基于卫星定位的技术,利用地球上的卫星系统和接收设备,能够精确测量用户的位置坐标。
通过收集卫星信号并进行计算,可以确定用户在全球范围内的准确位置。
参考内容:美国国防部的GPS官方网站提供了关于GPS技术的详细介绍和参考资料,包括GPS原理、技术规范和应用案例等。
2. 基站定位基站定位是通过手机信号基站的信号强度和时延来确定用户的位置。
手机设备与基站之间的信号强度和时延会根据用户的位置而有所不同,因此可以利用这些数据来定位用户。
参考内容:《手机基站定位原理及其应用》是一本介绍手机基站定位原理和相关应用的书籍,可以提供该定位原理的详细介绍和案例分析。
3. Wi-Fi定位Wi-Fi定位利用用户附近的Wi-Fi信号查询数据库来确定用户的位置。
通过收集用户附近的Wi-Fi信号,并与预先存储的Wi-Fi数据库进行匹配,可以确定用户的位置坐标。
参考内容:Wi-Fi定位技术的详细介绍和应用案例可以在《无线定位技术与应用》一书中找到。
4. 地磁定位地磁定位是通过采集用户周围地球磁场的信息来确定位置。
地球磁场在不同位置有所差异,通过测量地磁数据,并与地磁数据库进行匹配,可以确定用户的位置。
参考内容:《地磁定位技术原理与应用》是一本介绍地磁定位原理和应用的书籍,提供了详细的技术解释和案例分析。
5. 蓝牙定位蓝牙定位是通过蓝牙信号的强度和时延来确定用户的位置。
与基站定位类似,蓝牙设备与用户间的信号会有所差异,可以利用这些数据来定位用户。
参考内容:《蓝牙定位原理与应用技术》是一本详细介绍蓝牙定位原理和应用的书籍,提供了相关技术的详细解释和应用实例。
6. 视觉定位视觉定位是通过识别用户周围的景物、建筑物或地标来确定用户的位置。
六点定位原则六点定位原则是企业经营管理中的一种经典定位方法,它是营销学中的重要理论之一,适用于市场营销、品牌战略、产品定位、渠道建设等各个领域。
这里介绍的六点定位原则,是在营销学中较为常用的定位方法,下面将详细阐述。
一、目标群体定位原则目标群体定位原则是六点定位原则的核心,也是最重要的一个定位原则。
企业在做产品营销时,首先需要考虑哪些人是最需要或最容易购买自己产品的目标群体。
明确目标群体后,企业就可以通过针对性的营销手段去吸引这部分人的注意力,进而提高销售额。
这个原则的实施关键在于对目标群体的准确定位,只有精准把握目标群体的需求和心理,才能找到合适的定位策略和营销手段。
二、差异化定位原则差异化定位原则是企业在定位产品时,将自己的产品与竞争对手的产品进行对比,确定自己产品的特点和优势。
针对这些特点和优势,企业可以采用不同的营销方式,打造独特的产品品牌形象,从而吸引更多的目标客户和市场份额。
这个原则的实行,需要企业在产品的设计和研发过程中,重视产品的独特性和差异性,并且要对竞争对手的产品和营销策略进行充分分析研究。
三、发展空间定位原则发展空间定位原则是指企业通过对市场环境和消费者需求的分析,确定自己在市场中的发展空间和战略方向。
企业需要认真考虑自己营销的产品在市场上的潜在需求和未来的发展趋势,从而制定相应的产品规划和营销策略。
这个原则的实现关键在于企业要在市场中不断寻找新机遇,尝试新的创新性的产品和营销手段,从而占据市场这样更大的发展空间。
四、价值定位原则价值定位原则是指企业根据产品的特性和优势,确定自己的产品在目标客户心目中的价值,从而制定相应的产品定价策略。
价值定位要求企业要深入了解目标客户的需求与意愿,并根据这些信息去灵活调整产品的定价水平,达到客户满意、销售量稳定的目的。
五、市场占有率定位原则市场占有率定位原则是指企业在产品营销过程中,通过市场份额的预测和计算,确定自己在市场上的占有率和竞争优势。
六点定位原则及定位基准的选择一、六点定位原则一个尚未定位的工件,其位置是不确定的。
如图3-30 所示,将未定位的的工件(长方体)放在空间直角坐标系中,长方体可以沿X 、Y 、Z 轴移动有不同的位置,也可以绕X 、Y 、X 轴转动有不同的位置。
用以描述工件位置不确定性的以X、Y、Z三个互相垂直的坐标轴。
X方向移动、Y方向移动、Z方向移动。
以X轴为轴心转动、以Y轴为轴心转动、以Z轴为轴心转动。
这六个自由度。
工件要正确定位首先要限制工件的自由度。
设空间有一固定点,长方体的底面与该点保持接触,那么长方体沿Z 轴的移动自由度即被限制了。
如果按图3-30 所设置六个固定点,长方体的三个面分别与这些点保持接触,长方体的六个自由度均被限制。
其中XOY 平面上的呈三角形分布的三点限制了、、三个自由度;YOZ 平面内的水平放置的两个点,限制了、二个自由度;XOZ 平面内的一点,限制了一个自由度。
限制三个或三个以上自由度的称为主要定位基准。
这种用适当分布的六个支承点限制工件六个自由度的原则称为六点定位原则。
支承点的分布必须适当,否则六个支承点限制不了工件的六个自由度。
例图3-30 中XOY 平面内的三点不应在一直线上,同理,YOZ 平面内的两点不应垂直布置。
六点定位原则是工件定位的基本法则,用于实际生产时起支承作用的是有一定形状的几何体,这些用于限制工件自由度的几何体即为定位元件。
表3-10 为常用定位元件能限制的工件自由度。
二、由工件加工要求确定工件应限制的自由度数工件定位时,影响加工精度要求的自由度必须限制;不影响加工精度要求的自由度可以限制也可以不限制,视具体情况而定。
按照工件加工要求确定工件必须限制的自由度是工件定位中应解决的首要问题。
例如图3-31 所示为加工压板导向槽的示例。
由于要求槽深方向的尺寸A 2 ,故要求限制Z 方向的移动自由度;由于要求槽底面与C 面平行,故绕X 轴的转动自由度和绕Y 轴的转动自由度要限制;由于要保证槽长A 1 ,故在X 方向的移动自由度要限制;由于导向槽要在压板的中心,与长圆孔一致,故在Y 方向的移动自由度和绕Z 轴的转动自由度要限制。
工程图的基准和六点定位•何为六点定位如下图:根据理论力学的原理要确定刚体在空间的位置須有六个坐标系即x,y,z三个线坐标和沿x,y,z旋转的三个角坐标.刚体放在与x,y,z组成的三个亙相垂直平面的立体中设想这个刚体是長方体(其它任何形状的刚体都同样)把刚体的一个面设为x’y’坐标面xy.刚体另一平面设为z’x’贴合zx刚体的再一平面设为z’y’贴合zy平面.因刚体x’y’平面和坐标xy平面完全贴合即在z方向上不能移动亦即在z方向的位置确定了且因平面和平面的贴合此刚体沿x和y轴均不能转动即X’y’平面z的移动沿x的转动沿y的转动Z’x’平面y的移动沿z的转动沿x的转动Z’y’平面x的移动沿z的转动沿y的转动X’y’平面z的移动沿x的转动沿y的转动Z’x’平面y的移动沿z的转动Z’y’平面x的移动z的移动沿x的转动沿y的转动:y的移动沿z的转动:x的移动综上所述空间相亙垂直的三个面要定位一个刚体只需如上所述的六个坐标即可即如XY平面z的移动沿x的转动沿y的转动ZX平面y的移动沿z的转动ZY平面x的移动设想每个三坐标系中的线坐标和角坐标毎个坐标都定义空间的一个点即如下列表工程图的基准是以A 基准和B 基准C 基准组成亦可表述为与三个亙相垂直的三个A,B 和C 基准平面组成. 基准可由面或线或点形成. 显然三个互相垂直的基准面可分A 基准面由三点替代B 基准面由二点替代C 基准面由一点替代几何学原理告诉我们三点可确定一个面, 二点可确定一条线.由此可知如找工程图的A 基准面只需找到一个面至少三点组成的面,B 基准面只需找垂直于A 基准面的二点组成的一条线,C 基准面只需在垂直于A 基准面和B 基准面中的一个点即可代表C 基准面.从六点定位原理可知定位一个刚体不能多于六点, 多了即过定位.同理工程图中的基准也不能多于六点.A 基准于面表述不能多于三点也不能少于三点, 如多于三点另一点必是辅助基准. ,部件进行调整,使其稳定。
工件的六点定位原则一、概述工件的定位和夹紧是机械制造工艺中十分重要的技术内容之一,因为零件在加工时在机床上的正确安装(定位和夹紧)与否是获得合格零件的关键,保证加工时刀具与工件之间正确加工位置,就是说是保证零件的尺寸精度、形状和位置精度以及合格的表面质量等重要技术要求的关键。
二、六点定位原则(一)六个自由度:物体在空间具有六个自由度,即沿x、y、z三个直角坐标轴方向的移动自由度和绕这三个坐标轴的转动自由度。
因此,要完全确定物体的位置,就必须消除这六个自由度。
(二)工件加工时限制自由度的目的:的相互位置精度。
(三)工件的六点定位原则:(工件图例说明)该工件需要保证槽子的位置尺寸是:A±△A、B ±△B、C ±△ C要保证A±△A要保证B±△B要保证C±△C(四)定位支承点的合理分布:如果定位支承点如图分布,将有以下自由没法限制,即为:使工件产生绕Y轴和Z轴的旋转而无法保证A±△A、B ±△B的加工精度定位支承点像这样在同一条直线上,是绝对不允许的,属不合理分布。
二、六点定位原则的应用(一)分析模型的建立1、建立三位坐标系2、设立分析平面一个大平面(三点):限制一个移动和两个转动一个狭长平面(两点):限制一个移动和一个转动一个小平面(一点):限制一个移动(如图)(二)投影(1)对工件与夹具定位元件的接触面按其特点分别往三个坐标平面上投影。
(2(3(三)定位分析1、套类工件在芯轴上的定位:投影结果:1)XOY面限制了2)YOZ面限制了(2)圆柱形工件在V型贴上定位:1)圆柱在两个短V型铁上定位限制了:2)思考:A)圆柱体在长、短V型铁上定位。
B)圆柱体在车床上两顶尖安装时的定位。
六点定位原则及定位基准的选择
收藏此信息推荐给好友 2009-6-24 来源:机电商情网
一、六点定位原则
一个尚未定位的工件,其位置是不确定的。
如图3-29 所示,将未定位的的工件(长方体)放在空间直角坐标系中,长方体可以沿X 、Y 、Z 轴移动有不同的位置,也可以绕X 、Y 、X 轴转动有不同的位置,分别用、、和、、表示。
用以描述工件位置不确定性的、、、、、合称为工件的六个自由度。
其中、、称为工件沿X 、Y 、Z 轴的移动自由度,、、称为工件绕X 、Y 、Z 轴的转动自由度。
工件要正确定位首先要限制工件的自由度。
设空间有一固定点,长方体的底面与该点保持接触,那么长方体沿Z 轴的移动自由度即被限制了。
如果按图3-30 所设置六个固定点,长方体的三个面分别与这些点保持接触,长方体的六个自由度均被限制。
其中XO Y 平面上的呈三角形分布的三点限制了、、三个自由度;YOZ 平面内的水平放置的两个点,限制了、二个自由度;XOZ 平面内的一点,限制了一个自由度。
限制三个或三个以上自由度的称为主要定位基准。
这种用适当分布的六个支承点限制工件六个自由度的原则称为六点定位原则。
支承点的分布必须适当,否则六个支承点限制不了工件的六个自由度。
例图3-30 中XOY 平面内的三点不应在一直线上,同理,YOZ 平面内的两点不应垂直布置。
六点定位原则是工件定位的基本法则,用于实际生产时起支承作用的是有一定形状的几何体,这些用于限制工件自由度的几何体即为定位元件。
表3-10 为常用定位元件能限制的工件自由度。
二、由工件加工要求确定工件应限制的自由度数
工件定位时,影响加工精度要求的自由度必须限制;不影响加工精度要求的自由度可以限制也可以不限制,视具体情况而定。
按照工件加工要求确定工件必须限制的自由度是工件定位中应解决的首要问题。
例如图3-31 所示为加工压板导向槽的示例。
由于要求槽深方向的尺寸 A 2 ,故要求限制Z 方向的移动自由度;由于要求槽底面与 C 面平行,故绕X 轴的转动自由度和绕Y 轴的转动自由度要限制;由于要保证槽长 A 1 ,故在X 方向的移动自由度要限制;由于导向槽要在压板的中心,与长圆孔一致,故在Y 方向的移动自由度和绕Z 轴的转动自由度要限制。
这样,在加工导向槽时,六个自由度都应限制。
这种六个自由度都被限制的定位方式称为完全定位。
图3-31 的导板如在平面磨床上磨平面,要求保证板厚 B ,同时加工面与底面应平行,这时,根据加工要求只需限制、、三个自由度就可以了。
这种根据零件加工要求实际限制的自由度少于六个的定位方法称为不完全定位。
如工件在某工序加工时,根据零件加工要求应限制的自由度而未被限制的定位方法称为欠定位。
欠定位在零件加工中是不允许出现的。
如果某一个自由度同时由多于一个的定位元件来限制,这种定位方式称为过定位或重复定位。
如图3-32 所示为一个零件在自由度上有左右两个支承点限制,这就产生了过定位。