定位粗基准选择解析
- 格式:doc
- 大小:1.58 MB
- 文档页数:3
如何在机械加工中正确理解定位基准摘?要在机械加工中,我们在加工工件的时候,要明确定位基准。
工件在进行机械加工的时候,需要将工件定位。
而这种定位不仅仅是将工件夹住这么简单,而是工件在夹具上要找到加工的基准面。
通常在机械加工设备中,都有定位元件。
我们在对工件进行机械加工之前,首先要面对的就是定位基准选择问题,只有正确选择了定位基准,才能保证工件加工之后在尺寸和精度上能够充分满足要求。
从目前的机械加工常识中可以知道,机械加工的定位基准主要分为粗基准和精基准,我们在机械加工中要正确利用定位基准,保证工件加工达到图纸要求。
1机械加工中基准的分类在机械加工中,定位基准是一个重要的技术指标。
如果不能正确选择定位基准,工件不但无法保证表面尺寸,其整个加工精度也将出现较大偏差。
此外,定位基准还关系到机械加工过程的工艺安排和夹具结构的调整。
所以,我们在机械加工的过程中,必须明确定位基准的分类及选择方法。
在对定位基准的理解中,机械加工中所说的定位基准主要是指工件的几何尺寸加点、线、面等几何数据。
从目前机械加工基准的使用来看,基准主要分为设计基准和工艺基准这两个类型。
其中设计基准主要是指图纸上所表述的基准,例如工件中轴和孔的中心线等。
工艺基准主要是指在机械加工工艺过程中所使用的基准。
主要有定位基准、测量基准和装配基准等几种类型。
其中定位基准是最基础的基准,对工件的加工精度有着重要影响。
2粗基准的选择原则工件在进行机械加工之前,所有的面都处于毛坯状态,在这种状态下,要想实现对工件的准确定位并确定加工面,就要以工件的某一毛坯面为定位基准。
通常我们称这种方式确定的定位基准为粗基准。
我们在选择确定粗基准的时候,要想使粗基准达到要求,就要做好两方面的工作,一方面是要使工件的加工面和不加工面之间的位置和精度达到要求,另一方面是要确定合理的加工余量,保证加工精度达到要求。
在工件机械加工粗基准的选择中,主要应遵循以下原则。
2.1以工件不加工的表面作为粗基准在工件上选择粗基准的时候,通常我们会选择不加工的表面作为粗基准,这主要是因为工件有时并不是所有的面都需要加工,总有一到两个面不需要加工,我们选择不加工的表面作为粗基准的时候,可以保证定位基准的有效性。

定位基准的选择在制定零件加工的工艺规程时,正确地选择工件的定位基准有着十分重要的意义。
定位基准选择的好坏,不仅影响零件加工的位置精度,而且对零件各表面的加工顺序也有很大的影响。
本节先建立一些有关基准和定位的概念,然后再着重讨论定位基准选择的原则。
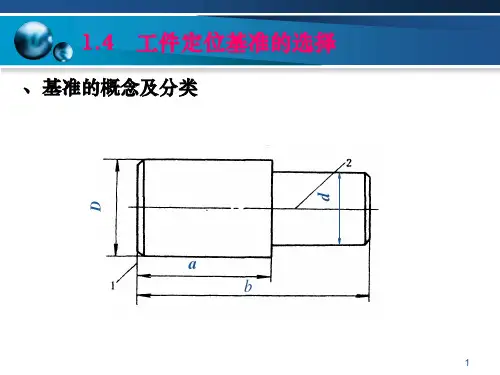
(一)基准的概念零件都是由若干表面组成,各表面之间有一定的尺寸和相互位置要求。
模具零件表面间的相对位置要求包括两方面:表面间的距离尺寸精度和相对位置精度(如同轴度、平行度、垂直度和圆跳动等)要求。
研究零件表面间的相对位置关系离不开基准,不明确基准就无法确定零件表面的位置。
基准就其一般意义来讲,就是零件上用以确定其他点、线、面的位置所依据的点、线、面。
基准按其作用不同,可分为设计基准和工艺基准两大类。
1、设计基准在零件图上用以确定其他点、线、面的基准,称为设计基准。
例如图9-1所示的零件,其轴心线O-O是各外圆表面和内孔的设计基准;端面A是端面B,C的设计基准;内孔表面D体现的轴心线O-O是φ40h外圆表面径向圆跳动和端面B端面圆跳动的设计基准。
2、工艺基准零件在加工和装配过程中所使用的基准,称为工艺基准。
工艺基准按用途不同,又分为定位基准、测量基准和装配基准。
(1)定位基准加工时使工件在机床或夹具中占据正确位置所用的基准,称为定位基准。
例如图9-1所示零件,零件套在心轴上磨削φ40h外圆表面时,内孔即为定位基准。
(2)测量基准零件检验时,用以测量已加工表面尺寸及位置的基准,称为测量基准。
如图9-1所示,当以内孔为基准(套在检验心轴上)检验φ40h外圆的径向圆跳动和端面B的端面圆跳动时,内孔即为测量基准。
(3)装配基准装配时用以确定零件在部件或产品中位置的基准,称为装配基准。
例如,图9-1所示零件φ40h及端面B即为装配基准。
(二)工件的安装方式为了在工件的某一部位上加工出符合规定技术要求的表面,在机械加工前,必须使工件在机床上相对于工具占据某一正确的位置。

工件的定位与定位基准的选择机械加工中,为了保证工件的位置精度和用调整法获得尺寸精度时,工件相对于机床与刀具必须占有一正确位置,即工件必须定位。
而工件装夹定位的方式有:直接找正、划线找正和用夹具装夹三种方式,下面我们讨论工件在夹具中的定位问题。
工件在夹具中的定位涉及到定位原理、定位误差、夹具上采用的定位元件和工件上选用的定位基准等几方面的问题,有关定位误差的计算和定位元件的选用在夹具设计一章讲授,这里只介绍定位原理和定位基准的选择。
一、定位原理1.六点定则工件在夹具中的定位的目的,是要使同一工序中的所有工件,加工时按加工要求在夹具中占有一致的正确位置(不考虑定位误差的影响)。
怎样才能各个工件按加工要求在夹具中保持一致的正确位置呢?要弄清楚这个问题,我们先来讨论与定位相反的问题,工件放置在夹具中的位置可能有哪些变化?如果消除了这些可能的位置变化,那么工件也就定了位。
任一工件在夹具中未定位前,可以看成空间直角坐标系中的自由物体,它可以沿三个坐标轴平行方向放在任意位置,即具有沿三个坐标轴移动的自由度X,Y,Z;同样,工件沿三个坐标轴转角方向的位置也是可以任意放置的,即具有绕三个坐标轴转动的自由度X,Y,Z。
因此,要使工件在夹具中占有一致的正确位置,就必须限制工件的X,Y,Z;X,Y,Z六个自由度。
图2-16工件的六个自由度为了限制工件的自由度,在夹具中通常用一个支承点限制工件一个自由度,这样用合理布置的六个支承点限制工件的六个自由度,使工件的位置完全确定,称为“六点定位规则”,简称“六点定则”。
例如用……使用六点定则时,六个支承点的分布必须合理,否则不能有效地限制工件的六个自由度。
在具体的夹具结构中,所谓定位支承是以定位元件来表达的,如上例中长方体的定位以六个支承钉代替六个支承点(图2-17c),这种形式的六点定位方案比较明显,下面再介绍其他形式工件的定位方案。
2.对定位的两种错误理解我们在研究工件在夹具中的定位时,容易产生两种错误的理解。

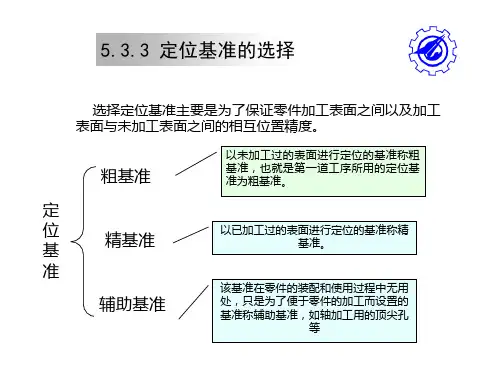
定位基准的选择一、定位基准的概念和类型在加工时,用以确定零件在机床的正确位置所采用的基准,称为定位基准。
它是工件上与夹具定位元件直接接触的点、线或面。
如图11-14a所示零件,加工平面F和C时是通过平面A和D放在夹具上定位的,所以,平面A和D是加工平面F和C的定位基准。
又如图11-14b所示的齿轮,加工齿形时是以内孔和一个端面作为定位基准的。
根据工件上定位基准的表面状态不同,定位基准又分为精基准和粗基准。
精基准是指已经经过机械加工的定位基准,而没有经过机械加工的定位基准为粗基准。
图11-4基准分析二、精基准的选择定位基准的选择应先选择精基准,再根据精基准的加工选择粗基准。
选择精基准时,主要应考虑保证加工精度和工件安装方便可靠。
其选择原则如下:1.基准重合原则即选用设计基准作为定位基准,以避免定位基准与设计基准不重合而引起的基准不重合误差。
当设计基准与定位基准不重合时,在加工误差中将会增加一个误差值,其值大小等于设计基准和定位基准之间的尺寸误差,这就是基准不重合误差。
当基准重合时,则没有基准不重合误差。
图11-5表示具有相交孔的轴承座准备镗以O-O为中心线的孔。
在该工序之前,零件的M、H、K 平面已加工好,并且M-H、H-K之间的尺寸为C+T C及B+T B。
本工序要求镗出的孔中心线O-O距K表面的尺寸为A+T A。
为此,工件可以考虑几个定位加工方案:图11-15b所示方案以M面为定位基准。
加工时采用“调整法”加工,即镗杆中心线距机床工件台或夹具定位元件工作表面间的位置已经调好,固定不变。
这时获得的尺寸A的大小将和M-K面间的可能相对位置变化有关,其最大可能位置变化为尺寸B和C的公差之和,即ΔB =T B +T C图11-15c所示方案以H面为定位基准。
因工序基准与定位基准不重合而引起的A尺寸的误差仅是H-K间的位置变化,即ΔB = T B图11-15d所示方案以设计基准K面为定位基准,此时δ基准不重合= 0由上例可知,加工中最好直接用设计基准作为定位基准,以便消除基准不重合误差。
齿轮零件的机械加工工艺过程及进行滚齿加工用的夹具设计第一部份齿轮零件的机械加工工艺过程1、定位基准的选择在零件的加工过程中,合理的选择定位基准对保证零件的尺寸精度和位置度有着决定性的作用。
根据工件加工要求确定工件应限制的自由度数后,某一方向自由度的限制往往会有几个定位基准可选择,则提出了如何正确选择定位基准的问题。
定位基准有粗基准和精基准之分。
1.1. 粗基准的选择原则:(1)尽量选择不要求加工的表面作为粗基准.这样可使加工表面与不加工表面之间的位置误差量最小,同时还可以在一次装夹中加工出更多的表面。
(2)若零件的所有表面都要加工,应选择加工余量和公差最小的表面作为粗基准.这样可保证作为粗基准的表面在加工时,余量均匀。
(3)选择光洁、平整、面积足够大、装夹稳定的表面作为粗基准。
(4)粗基准一般只在第一到工序中用,以后应避免重复使用。
1.2.精基准的选择原则:基准重合的选择原则。
尽可能的用设计基准作为定位基准,这样可避免因定位基准与设计基准不重合而引起的定位误差,以保证加工表面与设计基准间的位置精度。
基准同一原则.一尽可能多的表面加工都用同一个定位基准,这样有利于保证各加工面之间的位置精度。
选择面积大、精度较高、安装稳定的表面作为精基准,而且所选的基准使夹具结构简单,装夹和加工方便。
综合上面的粗基准和精基准的选择原则,为使基准同一和基准重合,齿轮加工时常选内孔和端面作为精基准加工外圆和齿轮,用作精基准的端面和内孔要在一次装夹中加工出来以保证两者之间的垂直度,但是在加工大型齿轮时可用外圆作找正基准,但此时应保证内孔与外圆同轴。
所以加工本设计齿轮用齿轮外圆和端面作为粗基准,用内孔和端面作为精基准。
2.、装夹方法在加工齿轮时在滚齿机上一般用心轴装夹,滚齿心轴夹具3.、加工工艺问题(1)、基准修正齿形表面淬火后,内孔会受到影响而变形:一般的孔直径会缩小0.01-0.05mm,因此淬火后应安排精基准修正工序.修正的方法有推孔和磨孔,也可以用镗孔。

定位粗基准的选择原则
定位粗基准的选择原则主要包括以下几点:
1.保证相互位置精度原则:选取与加工表面相互位置精度要求较高的不加工表
面作为粗基准,以保证不加工表面与加工表面的位置要求。
2.加工余量合理分配原则:对所有表面都需要加工的工件,应该根据加工余量
最小的表面找正工件,以保证重要表面的加工余量均匀。
3.便于装夹原则:作为粗基准的表面,应尽量平整光滑,以便使工件定位准确、
夹紧可靠。
应考虑零件装夹方便,夹紧力适当等问题,以避免加工时引起振动或造成零件变形。
4.粗基准不重复使用原则:由于粗基准的精度较低,如重复使用会引起较大的
误差,因此,在选择粗基准时应避免重复使用粗基准。
5.保证零件加工表面相对于不加工表面具有一定位置精度的原则:为保证不加
工表面相对于加工表面具有较为精确的相对位置精度,应选不加工面作粗基准。
当零件上有几个加工面,应选与加工面的相对位置要求高的不加工面为粗基准。
1/ 1。
粗基准和精基准的定义和选择
一、什么是粗基准?粗基准的选择是怎样的?
工件在机械加工中第一道工序用未加工的毛坯表面做定位基准,这咱定位表面称为粗基准。
粗基准的选择如下:
1. 如果必须首先保证阀门工件上加工表面与不加工表面之间的位置要求,应以不加工表面作为粗基准。
如果在工件上有很多不需加工的表面,则应以其中与加工面的位置精度要求较高的表面作粗基准。
2. 如果必须首先保证工件某重要表面的余量均匀,应选择该表面作粗基准。
3. 选作粗基准的表面,应平整,没有浇、冒口或飞边等缺陷,以便定位可靠。
4. 粗基准一般只能使用一次,特别是主要定位基准,以棉产生较大的位置误差。
二、什么是精基准?精基准的选择是怎样的?
用工件的已加工表面做定位基准称精基准。
精基准的选择如下:
1. 用工序基准作为精基准,实现“基准重合”,以免产生基准不重合误差。
2. 当工件以某一组精基准定位可以较方便的加工其他各表面时,应尽可能在多数工序中采用此组精基准定位,实现“基准统一”,以减少工装设计制造费用、提高生产率、避免基准转换误差。
3. 当精加工或光整加工工序要求余量尽量小而均匀时,应选择加工表面本
身作为精基准,即遵循“自为基准”原则。
该加工表面与其他表面间的位置精度要求由先行工序保证。
4. 为了获得均匀的加工余量或较高的位置精度,可遵循互为基准、反复加工的原则。
THANKS !!!
致力为企业和个人提供合同协议,策划案计划书,学习课件等等
打造全网一站式需求
欢迎您的下载,资料仅供参考。
简述粗基准选择原则简述粗基准选择原则引言:在进行地面工程建设前,需要对地面进行粗基准测量,以确定工程建设的高程和平面位置。
而在进行粗基准测量时,需要遵循一些基本的原则,以保证测量结果的准确性和可靠性。
本文将详细介绍粗基准选择原则。
一、什么是粗基准?粗基准是指用于确定工程建设高程和平面位置的一组已知点。
其中,高程点称为高程基准点,平面点称为平面控制点。
二、粗基准选择原则1. 精度要求在选择粗基准时,首先要考虑其所需满足的测量精度要求。
通常情况下,根据工程建设的特点和实际需要确定所需满足的测量精度要求,并根据此来选择合适的粗基准。
2. 位置要求除了考虑测量精度要求外,在选择粗基准时还需要考虑其位置是否符合实际需要。
具体来说,应该优先选择距离工程建设区域较近、分布均匀、数量充足且易于观测和保护的控制点作为粗基准。
3. 稳定性要求在选择粗基准时,还需要考虑其稳定性。
具体来说,应该优先选择地质构造稳定、不易发生地震等自然灾害的地区作为粗基准,以保证其长期稳定性和可靠性。
4. 坐标系要求在选择粗基准时,还需要考虑所选控制点的坐标系是否与工程建设所需的坐标系相同。
如果不同,则需要进行相应的坐标转换。
5. 数据共享要求在选择粗基准时,还需要考虑数据共享的要求。
具体来说,应该优先选择已经公开发布或者能够获取到测量数据的控制点作为粗基准,以便于后续工程建设中的数据共享和交流。
三、总结以上就是粗基准选择原则的详细介绍。
在进行地面工程建设前,选择合适的粗基准至关重要。
只有遵循合理科学的原则,在实践中不断总结经验和教训,并加强技术研究和创新,才能更好地保障工程建设质量和安全。
定位粗基准的选择以未加工过的表面进行定位的基准称为粗定位基准,简称粗基准。
当毛坯加工完成后,零件进入机械加工过程的第一道工序,其定位基准必然时毛坯表面,即粗基准。
选择粗基准时应遵循以下基本原则:一、选择重要表面为粗基准图1如图所示,在床身加工中,导轨面时最重要的工作表面,要求加工时切去薄而均匀的一层金属,使其保留铸造时在导轨面所形成的均匀而细密的金相组织,以便增加导轨的耐磨性。
因此,在第一道工序中,应选择导轨面作为车床床身的粗基准加工床脚。
在第二道工序中,再以已加工的床脚底平面作为精基准加工导轨面,这样导轨面的加工余量可以小而均匀,加工后表层金相组织均匀,力学性能基本相同,在使用过程中表面的磨损就会比较均匀。
二、选择加工余量小的表面为粗基准图2如图阶梯轴毛坯,毛坯大小头的同轴度误差为3mm,小头的加工余量为5mm.而大头的加工余量为8mm,以加工余量最小的小头作粗基准加工大头,则加工余量足够。
如果反过来采用大头作粗基准加工小头,则小头的加工余量不足,继续加工会导致工件报废。
三、选择不需加工并且与加工表面有相互位置精度要求的表面为粗基准。
图3如图所示,如果采用不加工的A面作粗基准加工内孔,则加工后内孔与不加工表面A面的同轴度好;如果采用内孔B面做粗基准加工内孔,则加工后内孔与不加工表面A面的同轴度不好。
四、选择比较光洁、平整、面积足够大、装夹稳定的表面作粗基准,不允许有锻造飞边和铸造浇道、冒口或其他缺陷,以确保定位准确,加紧可靠。
五、粗基准在同一尺寸方向上只允许在第一道工序中使用一次,不得重复使用,以避免产生较大的定位误差。
图4如图所示,工件以表面B为粗基准加工表面A之后,如果仍以表面B为粗基准加工表面C,由于不能保证工件轴心线在前后两次装夹中位置的一致性,就必然导致加工出来的表面A 与C之间产生较大的同轴度误差。
六、在处理上述由粗基准向精基准过渡的问题时,在下列情况下可以例外:(一)当毛坯质量很高,而加工表面之间的位置精度要求较低时,可以重复使用同一组毛坯表面作为粗基准。
定位粗基准的选择
以未加工过的表面进行定位的基准称为粗定位基准,简称粗基准。
当毛坯加工完成后,零件进入机械加工过程的第一道工序,其定位基准必然时毛坯表面,即粗基准。
选择粗基准时应遵循以下基本原则:
一、选择重要表面为粗基准
图1
如图所示,在床身加工中,导轨面时最重要的工作表面,要求加工时切去薄而均匀的一层金属,使其保留铸造时在导轨面所形成的均匀而细密的金相组织,以便增加导轨的耐磨性。
因此,在第一道工序中,应选择导轨面作为车床床身的粗基准加工床脚。
在第二道工序中,再以已加工的床脚底平面作为精基准加工导轨面,这样导轨面的加工余量可以小而均匀,加工后表层金相组织均匀,力学性能基本相同,在使用过程中表面的磨损就会比较均匀。
二、选择加工余量小的表面为粗基准
图2
如图阶梯轴毛坯,毛坯大小头的同轴度误差为3mm,小头的加工余量为5mm.而大头的加工余量为8mm,以加工余量最小的小头作粗基准加工大头,则加工余量足够。
如果反过来采用大头作粗基准加工小头,则小头的加工余量不足,继续加工会导致工件报废。
三、选择不需加工并且与加工表面有相互位置精度要求的表面为粗基准。
图3
如图所示,如果采用不加工的A面作粗基准加工内孔,则加工后内孔与不加工表面A面的同轴度好;如果采用内孔B面做粗基准加工内孔,则加工后内孔与不加工表面A面的同轴度不好。
四、选择比较光洁、平整、面积足够大、装夹稳定的表面作粗基准,不允许有锻造飞边和铸造浇道、冒口或其他缺陷,以确保定位准确,加紧可靠。
五、粗基准在同一尺寸方向上只允许在第一道工序中使用一次,不得重复使用,以避免产生较大的定位误差。
图4
如图所示,工件以表面B为粗基准加工表面A之后,如果仍以表面B为粗基准加工表面C,由于不能保证工件轴心线在前后两次装夹中位置的一致性,就必然导致加工出来的表面A 与C之间产生较大的同轴度误差。
六、在处理上述由粗基准向精基准过渡的问题时,在下列情况下可以例外:
(一)当毛坯质量很高,而加工表面之间的位置精度要求较低时,可以重复使用同一组毛坯表面作为粗基准。
(二)在后续工序中,当主要的定位基准已经是精基准,为了保证本工序的加工表面与某一不加工表面的相互位置精度时,仍可用此不加工表面作为次要的定位基准。
(三)当工件上影响加工表面位置精度的基准已经是精基准,对于那些仅为了工件装夹方便等原因所选用的粗基准(对加工精度无影响),可以在加工过程中反复使用。