一种新的MPPT控制方法
- 格式:doc
- 大小:218.00 KB
- 文档页数:5

光伏发电中MPPT控制方法综述在光伏发电系统里,为了能充分利用光伏发电功率,最大功率点跟踪(MPPT)起着无法替代的作用。
本文将进行具体的分析,以供参考。
标签:光伏发电;MPPT;控制;应用1、前言光伏產业是当今世界上增速最快的行业之一。
为了实现环境和能源的可持续发展,光伏发电已成为很多国家发展新能源的重点,光伏发电将是未来主要的能量来源。
为了充分利用太阳能源,通过最大功率点跟踪(MPPT)的控制方法来使能量最大化以逐渐成为发展趋势。
2、常见的MPPT控制方法2.1 扰动观测法扰动观测法是最大功率跟踪算法中使用最广泛的一种算法,基本思想是:首先增加或减小光伏电池板的输出电压(或电流),然后观测光伏电池输出功率的变化,根据功率变化再连续改变电压(或电流)的幅值,使光伏电池输出功率最终工作于最大功率点。
扰动观察法由于简单易行而被广泛用于MPPT控制中,但随着研究的深入,该方法存在的不足之处逐渐显现出来,即存在震荡和误判的问题。
在实际应用过程中,由于检测精度和计算速度的限制,电压扰动的步长一般是一个定值,在这种情况下,就会产生震荡。
当步长越小时,震荡就越小,跟踪的速度就越慢。
要想达到理想的状态,就要在速度和精度做权衡考虑。
在扰动观察算法运行过程中,当工作电压达到最大功率点附近时,由于步长恒定,有些情况下,工作电压会跨过最大功率点,改变扰动方向后,工作电压再一次反向跨过最大功率点,如此往复循环,即出现了震荡,即扰动观察法的震荡问题。
当日照,温度等外界条件发生变化时,光伏阵列的特性缺陷也会跟着发生变化。
而扰动算法却无法察觉到,算法还认为是在一条曲线上进行扰动观察,此时就会出现扰动方向误判的情况,即扰动观测法的误判问题。
定步长的扰动观测法存在震荡和误判的问题,使系统不能准确的跟踪到最大功率点,造成了能量损失,因此需要对上述定步长的扰动观测法进行改进。
其中,基于变步长的扰动观测法可以在减小震荡的同时,使系统更快的跟踪到最大功率点;基于功率预测的扰动观测法可以解决外部环境剧烈变化时所产生的误判现象;基于滞环比较的扰动观测法在最大功率点跟踪过程中的震荡和误判这两方面均有较好的性能。

mppt控制原理MPPT控制原理。
MPPT(Maximum Power Point Tracking)是太阳能光伏系统中常用的一种控制方式,它可以使光伏组件的输出功率达到最大值,从而提高系统的整体效率。
本文将介绍MPPT控制原理及其在光伏系统中的应用。
首先,我们需要了解光伏组件的工作原理。
光伏组件是利用光的能量转换为电能的装置,当光照强度发生变化时,光伏组件的输出电压和电流也会相应变化。
然而,光照强度和温度的变化会导致光伏组件的电压-电流特性曲线发生偏移,从而影响光伏系统的工作效率。
为了克服这一问题,MPPT控制器应运而生。
MPPT控制器通过不断调整光伏组件的工作点,使其工作在最大功率点附近,从而最大化输出功率。
其控制原理主要包括以下几个方面:1. 电压-电流特性曲线分析,通过分析光伏组件的电压-电流特性曲线,可以确定其最大功率点的位置。
MPPT控制器利用这一特性进行功率跟踪,以保证系统始终工作在最大功率点。
2. 变步长寻峰算法,MPPT控制器采用变步长寻峰算法,根据当前工作点的功率变化情况,动态调整步长,快速而准确地找到最大功率点。
3. 输出功率反馈控制,MPPT控制器通过实时监测光伏组件的输出功率,并根据功率变化调整工作点,以实现最大功率输出。
在光伏系统中,MPPT控制器通常与光伏组件和逆变器相连接,通过对光伏组件输出电压和电流进行实时监测和调节,实现最大功率跟踪。
其工作流程如下:1. 监测光伏组件输出电压和电流;2. 根据当前电压和电流计算输出功率;3. 根据输出功率变化调整工作点,使其逐渐趋近最大功率点;4. 将调整后的工作点信息传递给逆变器,控制其输出电压和频率,以实现最大功率输出。
通过MPPT控制器的应用,光伏系统可以在不同光照条件下实现最大功率输出,提高系统的整体效率。
同时,MPPT控制器还可以实现对光伏组件的保护,避免过载和过压等问题的发生,延长光伏系统的使用寿命。
总之,MPPT控制原理是光伏系统中至关重要的一部分,它通过对光伏组件的输出电压和电流进行实时监测和调节,实现最大功率跟踪,提高系统的整体效率和稳定性。

一种改进的新型MPPT控制策略徐旭;杨向宇【摘要】Photovoltaic generic model was constructed,and the P-U,I-U characteristic was got with Matlab.Perturbation and observation (P&O) algorithm and incremental conductance (INC) algorithm were the maxiumum power point tracking MPPT in photovoltaic systems.But the step size of P&O algorithm was particularly important.The slope of the P-U curve changed during tracking,and the slope near the maximum power point was close to zero with quite different from the other position.So a new variable step size P&O algorithm which according to the range of slope of P-U curve to change the step size was proposed.Finally,this algorithm was implemented with Matlab/Simulink S-function,thereby obtaining simulation results.Verify that this improved MPPT control algorithm can be implemented,and has good dynamic performance and steady state performance,and maximum power point fast tracking is achieved.The proposed algorithm to some extent made up for the shortcomings of traditional P&O algorithm,and debugging was simple and easy to implement.%构建光伏电池通用模型,并用Matlab仿真得到P-U、I-U特性.目前光伏系统最大功率跟踪常用到的是扰动观测法和电导增量法,而扰动观测法中对步长的确定尤为重要.跟踪过程中P-U曲线斜率改变,且最大功率点附近斜率接近于零,与其位置斜率相差较大,因此提出了根据P-U曲线斜率范围来变更步长的一种新的变步长扰动观测法.最后,使用Matlab/Simulink中S函数实现算法,从而得到仿真结果.验证了这种改进的MPPT控制算法可以实现,有良好的动态性能和稳态性能,实现了最大功率的快速跟踪.所提出的算法在一定程度上弥补了传统扰动观测法的不足,且调试简单,便于实现.【期刊名称】《电源技术》【年(卷),期】2017(041)009【总页数】3页(P1353-1355)【关键词】光伏建模;最大功率跟踪;变步长;扰动观测法;控制【作者】徐旭;杨向宇【作者单位】华南理工大学电力学院,广东广州510641;华南理工大学电力学院,广东广州510641【正文语种】中文【中图分类】TM615Abstract:Photovoltaic generic model was constructed,and theP-U,I-Ucharacteristic was got with Matlab.Perturbation andobservation(P&O)algorithm and incremental conductance(INC)algorithm were the maxiumum power point tracking MPPT in photovoltaic systems.But the step size of P&O algorithm was particularly important.The slope of theP-Ucurve changed during tracking,and the slope near the maximum power point was close to zero with quite different from the other position.So a new variable step size P&O algorithm which according to the range of slope ofP-Ucurve to change the step size was proposed.Finally,this algorithm was implemented with Matlab/Simulink S-function,thereby obtaining simulation results.Verify that this improved MPPT control algorithm can be implemented,and has good dynamic performance and steady state performance,and maximum power point fast tracking is achieved.The proposed algorithm to some extent made up for the shortcomings of traditional P&O algorithm,and debugging was simple and easy to implement.Key words:PV cell modeling;MPPT;variable step size;P&O algorithm;control 随着世界能源短缺和环境污染问题的日益严重,世界各地都在大力发展新能源。
一种新型多峰值MPPT控制算法研究郭建龙,刘东,金波(上海空间电源研究所,上海200245)1概述在现实生活中,由于复杂的环境因素的存在,光伏阵列的电流-电压(I-U)特性曲线变成阶梯状,功率-电压(P-U)特性曲线呈现出多峰值现象。
但现有的最大功率点跟踪(MPPT)技术中,如爬山法、电导增量法、扰动观察法等,都是针对光伏阵列单峰值曲线中的最大功率点进行跟踪。
针对多峰值曲线,以上方法可能会使系统陷入局部极值点而造成跟踪失败,导致光伏阵列的输出功率未被充分利用。
文献[1]中的粒子群优化算法是一种全局扫描法,粒子群以及步长的选取不易实现,步长过大会导致遗漏全局最大功率点,步长过小会导致系统的收敛速率大大降低。
多峰值MPPT算法研究是近年来的热点问题。
本文针对不同光照强度下光伏阵列的输出曲线呈现多峰值的特点,提出了一种基于受遮挡情况下光伏阵列P-U输出曲线几何特性的多峰值MPPT算法。
通过理论分析并在MATLAB中进行仿真,验证本算法在实际工程中的可行性以及优越性。
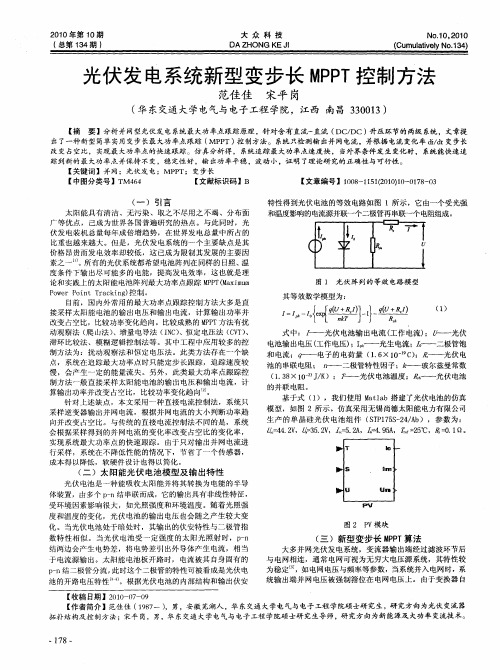
2光伏阵列曲线分析图1(a)为一串联支路的结构图,其中S n(S n为单个太阳电池等效元件)串联组成一条支路,图1(b)为光伏阵列所受光照不均匀时,由于热斑效应可能会对光伏阵列造成损坏,通常会在每个PV组件并联一个旁路二极管(D1、D2、D3、D4)。
当光伏阵列所受光照强度均匀时,光伏阵列输出曲线如图2所示。
光伏阵列的U-I特性曲线为单膝点曲线,U-P特性曲线为单峰值曲线。
当光伏阵列所受光照强度不均匀时,其输出曲线如图3所示,光伏阵列的U-I特性曲线为多膝点曲线,U-P特性曲线为多峰值曲线。
针对此曲线,传统MPPT跟踪算法在追踪最大功率点时可能会陷入局部极值点,从而导致追踪失效。
3多峰值MPPT算法实现3.1仿真模型搭建本文采用MATLAB/SIMULINK中ISoltech ISTH-220-P太阳能光伏阵列模块,具体参数如表1所示。
摘要:为实现受遮挡情况下光伏阵列最大功率跟踪,对三种阴影模式下的光伏阵列的输出曲线进行了分析,提出了一种基于受遮挡情况下光伏阵列P-U输出曲线几何特性的多峰值MPPT算法,解决了陷入局部极值而使得跟踪失败的问题,为多峰值下最大功率点跟踪技术的研究提供了一种新思路。
光伏发电中MPPT控制的新方法【摘要】本文针对光伏发电中MPPT控制的新方法进行了介绍,叙述了基于数值和基于粒子群的2种不同于常规的最大功率追踪技术的原理和方法,这些方法都在一定程度上提高了功率追踪的准确度。
【关键词】光伏发电MPPT控制功率点跟踪改进1 引言1.1 研究背景光伏发电技术是新能源发电技术的一种,具有环保、安全、寿命长等优点。
目前,光伏发电系统开发初期的投资较大,能量转换的效率也较低。
为了提高光伏系统的利用率,除了要提高光伏电池的能量转换效率外,还在系统中采用最大功率点跟踪(maximum power point tracking,MPPT)技术。
现时,已提出的光伏发电系统最大功率点跟踪(maximum power point tracking,MPPT)方案,虽然各具特色,但在动态跟踪的快速性、稳态跟踪精度方面,以及系统长期工作时寻优跟踪能力的鲁棒性方面仍显不足。
由于光伏电池本身具有典型的非线性,加上系统老化,参数变异等因素,导致常规MPPT方法的跟踪效果受到影响。
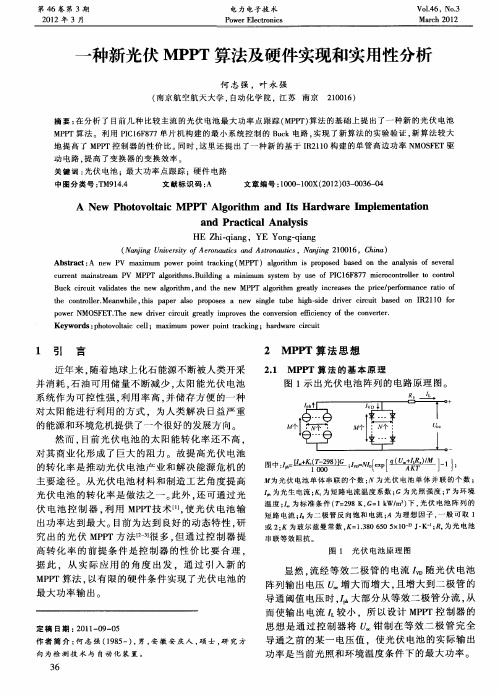
1.2 光伏电池输出特性分析受到外界因素(如温度、日照强度等)影响,光伏电池输出具有强烈的非线性,其数学模型可以表示为上式是光伏电池的UI特性关系,其中,U、I分别为光伏电池端电压和输出电流;A、B与PN结材料特性相关的系数;T为绝对温度;k为玻耳兹曼常数;q为电荷电量q=1.602×C;、分别为等效并联电阻和等效串联电阻。
由上图可以得出关于光伏电池特性的结论:(1)在光伏电池结温不变的情况下,其输出最大功率随日照强度的增强而增大,且最大功率点对应的电压几乎相同;在日照不变的情况下,太阳能电池的输p2.1 常规的MPPT技术的缺点光伏电池具有强非线性特征,自身受到温度和光照影响大,在某种光照和温度下只有一个最大功率点(MPP)。
为了提高效率,时常采用最大功率跟踪控制(Maximum Power Point Tracking,MPPT),使光伏电池工作在最大功率点,方法有恒电压法、扰动观察法、间歇扫描法,模糊控制法等。
一种改进的光伏发电MPPT控制策略提纲:一、引言Ll研究背景1.2研究目的二、现有光伏发电MPPT控制策略简介2.1基础信息2.2优缺点三、改进的光伏发电MPPT控制策略3.1概述3.2分析四、实验结果4.1性能测试4.2结论五、讨论5.1功率和效率5.2其他方面六、结论6.1总结6.2建议第一章引言Ll研究背景近年来,随着环境污染的加剧,对替代可再生能源的需求正在不断增加。
光伏发电是一种利用太阳能发电的技术,它不仅具有可再生性,而且可以在一定程度上减少环境污染。
但是,光伏发电系统的最大问题是,当光照量很低时,系统的效率会急剧下降。
此外,当太阳能发生变化时,光伏系统也会受到影响, 使得太阳能发电效率降低。
为了解决这些问题,我们需要一种更有效的MPPT (最大功率点跟踪)技术。
MPPT技术是用来优化光伏系统的最大功率点的一种技术。
它可以确保光伏系统在最佳功率点上运行,从而提高太阳能发电的效率。
目前,市场上有许多不同类型的MPPT技术,如单点跟踪技术,多点跟踪技术,视觉技术等。
然而,现有的技术都存在一些缺点,如低效率、缺乏机动性等。
为了解决这些问题,本文提出了一种新的改进的光伏发电MPPT控制策略。
1.2研究目的本研究的主要目的是提出一种新的改进的光伏发电MPPT控制策略,以提高光伏发电的有效性。
主要的目标是通过优化太阳能发电的最大功率点,来提高光伏发电的效率。
本文将研究这种新的MPPT控制策略的优点和缺点,比较其与现有技术的差异,以及与其他技术的比较。
第二章现有光伏发电MPPT控制策略简介2.1基础信息MPPT技术是一种改善太阳能发电效率的技术,它可以确保太阳能发电系统使用最大功率点进行发电。
目前,市场上有许多不同的MPPT技术,其中最主要的有单点跟踪技术、多点跟踪技术和视觉技术等。
单点跟踪技术是最常用的MPPT技术,它采用一个参考电势作为最大功率点,当实际电势大于参考电势时,调整电路来达到最大功率点。
一种新的MPPT控制方法
一、背景技术
世界范围内的能源短缺和环境污染已成为制约人类社会可持续发展的两大重要因素,大力发展新的可替代能源已成为当务之急。
太阳能发电作为一种新的电能生产方式,以其无污染、安全、资源丰富、分布广泛等特点显示出无比广阔的发展空间和应用前景。
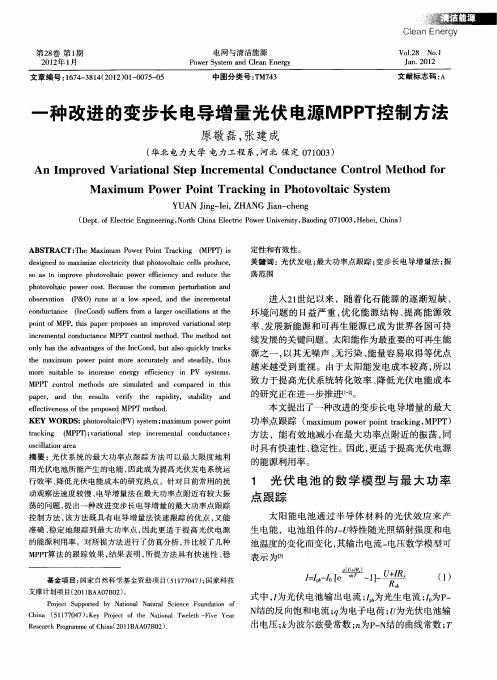
光伏电池是太阳能发电的核心部分,但受原材料和器件本身特性的影响,目前光电转换效率较低,因此根据光伏电池输出特性进行最大功率点跟踪,使光伏电池工作在最大功率点附近,这种方法称为最大功率点跟踪,即MPPT,这种方法可以有效提高系统输出功率及对太阳能的利用率。
1、本发明创造所涉及的产品原本是一种什么产品?它最基本的功能或作用是什么?
本文研究了一种新的MPPT控制方法,它可以使光伏电池板工作于最大功率点处,本文采用改进的扰动观察法,引进一个变步长参数来解决在最大功率点附近波动大的问题,同时运用功率预测法解决了扰动观察法存在的“误判”问题,使系统效率以及对太阳能的利用率得到提高。
2、现有的、别人的同类产品的结构是什么样子的?
目前常用的最大功率点跟踪方法有扰动观察法的和电导增量法,扰动观察法的主要控制思想是周期性给光伏电池叠加一个扰动变量,观察其输出功率的变化,如果功率变大,那么向相同的方向继续扰动,如果功率变小,则改变扰动方向;如下图,寄存器a(k)存放每一周期Vref的调整值∆V,Vref首先计算逆变器的输出功率P(k),并与上一周期的输出功率P(k-1)比较,然后判断扰动量∆V的符号,若P(k)>P(k-1),则扰动量∆V与上次同号处理,否则扰动量∆V与上次异号处理,从而调整Vref的大小,这种方法适用于光强变化小的环境。
电导增量法是根据最大功率的电压来调节太阳能电池的输出电压,它是通过比较太阳能电池阵列的瞬时导抗与导抗的变化量的方法来完成最大功率点跟踪的功能,dP/dV的是与输出电压值一一对应的,如下图,在最大功率点处dP/dV=0,此时电压保持不变即可,当dP/dV>0,在最大功率点左边,此时增大电压即可,当dP/dV<0,在最大功率点右边,此时减小电压即可。
并且dP/dV=d(IV)/dV=I+VdI/dV,因此通过判断I/V+dI/dV即G+dG的符号,就可以确定工作点的位置了。
控制框图如下
3、上述的同类产品存在什么问题或缺点?解决该问题或克服该缺陷的技术难点在哪里?
扰动观察法的算法简单,容易实现,但对于光强快速变化的环境会产生错误的跟踪,有较大的功率损失,有时还会发生程序控制在运行中的失序,出现“误判”,如下图在光强变化快速的情况下,假设一开始系统工作在①点,增加扰动量,由于外部环境变化,光伏电池特性变为曲线S2,系统工作于②点,此时功率大于①点时的功率,系统会认为最大功率点应该继续向右扰动,如果光强按这个趋势不断快速变化下去,这样工作点会越来越偏离最大功率点。
另外爬山法在跟踪系统稳定时,只能在最大功率点附件震荡运行,波动较大,降低系统效率。
电导增量法的算法波动较小,但较为复杂,跟踪过程需花费相当长的时间去执行A/D转换,对控制系统要求较高,另外电压初始化参数对系统启动过程中的跟踪性能有较大影响,电导增量法也存在震荡和误判的问题。
二、发明内容
4,、本发明创造的电路结构与问题2中同类产品的结构的区别在于?
本文采用改进的扰动观察法,引进一个变步长参数来解决在最大功率点附近波动大的问题,同时运用功率预测法解决了扰动观察法存在的“误判”问题,跟踪速度快,使系统效率以及对太阳能的利用率得到
提高。
5、请简述本发明创造的工作原理,说说它如何克服问题3中的缺陷?
MPPT控制系统的DC-DC变换的主电路采用Boost升压电路。
下图为Boost变换器的主电路,电路由开关管T、二极管D、电感L、电容C组成。
工作的原理为在开关T导通时,二极管D反偏,太阳能电池阵列向电感L存储电能;当开关T断开时,二极管导通,由电感L和电池阵列共同向负载充电,同时还给电容C充电,电感两端的电压与输入电源的电压叠加,使输出端产生高于输入端的电压。
引进一个变步长参数λ(k)来解决在最大功率点附近波动大的问题,可设λ(k)=ε|△P|,式中ε是一个恒定的常数,λ(k)为占空比步长,决定功率变化的步长,当远功率变化较小时,步长也较小,可以保证输出功率的平滑性,当功率变化较大时,步长也较大,能快速跟踪最大功率点,使系统具有一定的自适应能力,ε决定系统的灵敏性,另可设置一门限值e,当|△P|<e时,认为工作在最大功率区域,此时不需要调整参考电压,当|△P|>e,认为此时系统工作点偏离最大功率点,需要计算新的步长,这样来使系统震荡减小或避免。
功率预测法思路为:如下图,当采样频率足够高时,可以假定一个采用周期中辐照度的变化速率恒定,令kT时刻电压Uk处工作点测得的功率为P(k),此时并不对参考电压扰动,而在kT时刻后的半个采样周期(k+1/2)T时刻增加一次功率采样,若令采得的功率为P(k+1/2),则可得到基于一个采样周期的预测功率P`(k)为P`(k)=2(P(k+1/2)-P(k)),然后在(k+1/2)T时刻对参考电压施加扰动λ(k),
并在(k+1)T时刻测得功率为P(k+1),在(k+1)T时刻采得的功率P(k+1)和在(k+1/2)T时刻得预测频率P`(k)是同一辐照度下光伏特性曲线上电压扰动前后两个工作点的功率,因此根据这两个功率进行判断扰动方向便不会存在误判的现象。
控制框图如下
三、本发明的优点
6、与现有的、别人的同类产品相比,上述的发明内容带来了什么优点和技术效果?
本文采用改进的扰动观察法,引进一个变步长参数来解决在最大功率点附近波动大的问题,同时运用功率预测法解决了扰动观察法存在的“误判”问题,跟踪速度快,使系统效率以及对太阳能的利用率得到提高。
四、可替代方案
五、技术关键点
上述问题5中的内容。