安川MP2000系列 用户手册 运动程序篇
- 格式:pdf
- 大小:7.47 MB
- 文档页数:184
功能说明高性能化功能在机械的固有振动频率较低时,通过将机械系模型化补偿其滞后,从而抑制其振动。
利用该功能,可缩短低刚性机械的整定时间。
与机械的驱动系发生振动时,利用观测控制使其减低,实现高伺服增益的驱动。
通过该功能,改善伺服特性。
当机械产生高频共振音时,设定与机械系共振频率一致的振动泸波器,从而抑制共振。
由于轴共振引起伺服系起振时,通过转矩指令泸波器抑制轴共振。
由于采用了速度观测,实现了低速下的平滑运转和定位整定时间的缩短。
为改善电机加减速运转时的过渡特性,速度环的P1(比例积分)控制和P(比例)控制可切换。
从而抑制过调和欠调。
因加入了前馈补偿,从而缩短了定位时间。
当欲缩短定位时间时,可根据负载条件使用。
使用速度控制时,有时即使速度指令为“0”,由于漂移亦会产生移动。
零箝位动作就是与速度指令低于设定值时,经位置环将伺服锁定而使其停转的功能。
功能简单设定功能连接即动,简单设定。
由于惯量恒定精度的提高,所以无需调整伺服增益。
伺服驱动器判断伺服电机的功率、规格、无需设定电机参数,当连接不适用电机时,有报警显示。
可监控转矩指令的有效转矩运算值。
可监控再生电力的负载率。
累积负载率再生负载率80%50%再生过载报警前,可预先发出信号。
避免不经意间改写用户参数。
标准配备计算机接口,可进行用户参数的设定,速度转矩指令,监控波形的描绘及1:N通讯(N=14)。
无需输入指令,使用手操器亦可操作电机运行,便于试运转。
即使电源掉电,亦可记忆10次过去发生的报警,便于故障判断。
灵活应用功能通过与上位控制器之间的输入输出信号的分配,在9个信号中可进行3类选择。
在码盘的原点脉冲位置定位停。
用于电机轴和机械位置的匹配。
除可分别使用位置,速度及转矩控制外,亦可进行各控制模式的切换。
限制通过电机的最大电流,抑制过大的转矩的产生,应用于防止机械损坏。
可使用绝对值编码器。
使用了绝对值编码器,将无需原点复位动作,断电复位后,可即时起动。

图标的说明为使读者了解说明内容的区分本书中设计了如下图标并在必要的地方使用这些图标以助读者理解表示需要熟记的重要事项同时也表示发生警报但还不至于造成装置损坏的注意事项表示具体程序举例操作实例表示补充事项或记住后会便于使用的功能表示对难于理解的用语进行解释以及对事先没有说明而后出现的用语进行说明Copyright 2004株式会社 安川电机未经本公司的书面许可禁止转载或复制本书的一部分或全部内容目录图标的说明- - - - - - - - - - - - - - - - - - - - - - - - - -iii本手册的简介- - - - - - - - - - - - - - - - - - - - - - - - viii本手册的资料构成- - - - - - - - - - - - - - - - - - - - - - viii相关手册- - - - - - - - - - - - - - - - - - - - - - - - - - - ix本手册的使用方法- - - - - - - - - - - - - - - - - - - - - - - xi关于软件- - - - - - - - - - - - - - - - - - - - - - - - - - - xi 1章 梯形图指令1.1 继电器电路指令 - - - - - - - - - - - - - - - - - - -1-41.1.1 A触点指令(NOC) - - - - - - - - - - - - - - - - - - - - - -1-41.1.2 B触点指令(NCC) - - - - - - - - - - - - - - - - - - - - - -1-51.1.3 接通延时定时器指令(TON[10ms]) - - - - - - - - - - - - - - -1-51.1.4 断开延时定时器指令(TOFF[10ms])- - - - - - - - - - - - - - -1-71.1.5 接通延时定时器指令(TON[1s]) - - - - - - - - - - - - - - - -1-81.1.6 断开延时定时器指令(TOFF[1s])- - - - - - - - - - - - - - - -1-91.1.7 上升脉冲指令(ON-PLS)- - - - - - - - - - - - - - - - - - - 1-101.1.8 下降脉冲指令(OFF-PLS) - - - - - - - - - - - - - - - - - - 1-121.1.9 线圈指令(COIL)- - - - - - - - - - - - - - - - - - - - - - 1-131.1.10 置位线圈指令(S-COIL)- - - - - - - - - - - - - - - - - - - 1-141.1.11 复位线圈指令(R-COIL)- - - - - - - - - - - - - - - - - - - 1-151.2 数值运算指令 - - - - - - - - - - - - - - - - - - - 1-161.2.1 存储指令(STORE) - - - - - - - - - - - - - - - - - - - - - 1-161.2.2 加法指令(ADD) - - - - - - - - - - - - - - - - - - - - - - 1-181.2.3 加法扩展指令(ADDX)- - - - - - - - - - - - - - - - - - - - 1-201.2.4 减法指令(SUB) - - - - - - - - - - - - - - - - - - - - - - 1-211.2.5 减法扩展指令(SUBX)- - - - - - - - - - - - - - - - - - - - 1-231.2.6 乘法指令(MUL) - - - - - - - - - - - - - - - - - - - - - - 1-241.2.7 除法指令(DIV) - - - - - - - - - - - - - - - - - - - - - - 1-271.2.8 整型余数指令(MOD) - - - - - - - - - - - - - - - - - - - - 1-291.2.9 实型余数指令(REM) - - - - - - - - - - - - - - - - - - - - 1-301.2.10 增量指令(INC) - - - - - - - - - - - - - - - - - - - - - - 1-311.2.11 减量指令(DEC) - - - - - - - - - - - - - - - - - - - - - - 1-321.2.12 时间加法指令(TMADD) - - - - - - - - - - - - - - - - - - - 1-331.2.13 时间减法指令(TMSUB) - - - - - - - - - - - - - - - - - - - 1-351.2.14 时间经过指令(SPEND) - - - - - - - - - - - - - - - - - - - 1-371.2.15 符号取反指令(INV) - - - - - - - - - - - - - - - - - - - - 1-391.2.16 1的补码指令(COM) - - - - - - - - - - - - - - - - - - - - 1-411.2.17 绝对值转换指令(ABS) - - - - - - - - - - - - - - - - - - - 1-421.2.18 2进制转换指令(BIN) - - - - - - - - - - - - - - - - - - - 1-441.2.19 BCD转换指令(BCD) - - - - - - - - - - - - - - - - - - - - 1-451.2.20 校验转换指令(PARITY)- - - - - - - - - - - - - - - - - - - 1-461.2.21 ASCII码转换1指令(ASCII) - - - - - - - - - - - - - - - - 1-471.2.22 ASCII码转换2指令(BINASC)- - - - - - - - - - - - - - - - 1-491.2.23 ASCII码转换3指令(ASCBIN)- - - - - - - - - - - - - - - - 1-501.3 逻辑运算/比较指令 - - - - - - - - - - - - - - - -1-511.3.1 逻辑与指令(AND)- - - - - - - - - - - - - - - - - - - - - -1-511.3.2 逻辑或指令(OR) - - - - - - - - - - - - - - - - - - - - - -1-521.3.3 逻辑异或指令(XOR)- - - - - - - - - - - - - - - - - - - - -1-531.3.4 比较指令()- - - - - - - - - - - - - - - - - - - - - - -1-541.3.5 比较指令(≦)- - - - - - - - - - - - - - - - - - - - - - -1-551.3.6 比较指令()- - - - - - - - - - - - - - - - - - - - - - -1-561.3.7 比较指令()- - - - - - - - - - - - - - - - - - - - - - -1-571.3.8 比较指令(≧)- - - - - - - - - - - - - - - - - - - - - - -1-581.3.9 比较指令()- - - - - - - - - - - - - - - - - - - - - - -1-591.3.10 范围检查指令(RCHK) - - - - - - - - - - - - - - - - - - - -1-60 1.4 程序控制指令 - - - - - - - - - - - - - - - - - - -1-631.4.1 图调用指令(SEE)- - - - - - - - - - - - - - - - - - - - - -1-631.4.2 运动程序调用指令(MSEE) - - - - - - - - - - - - - - - - - -1-641.4.3 函数调用指令(FUNC) - - - - - - - - - - - - - - - - - - - -1-651.4.4 连续执行型直接输入指令(INS)- - - - - - - - - - - - - - - -1-661.4.5 连续执行型直接输出指令(OUTS) - - - - - - - - - - - - - - -1-691.4.6 扩展程序执行指令(XCALL)- - - - - - - - - - - - - - - - - -1-711.4.7 WHILE指令(WHILE END_WHILE)- - - - - - - - - - - - - - - -1-721.4.8 IF指令(IF END_IF) - - - - - - - - - - - - - - - - - - - -1-741.4.9 IF指令(IF ELSE END_IF) - - - - - - - - - - - - - - - - -1-761.4.10 FOR指令(FOR END_FOR)- - - - - - - - - - - - - - - - - - -1-781.4.11 EXPRESSION指令(EXPRESSION) - - - - - - - - - - - - - - - -1-80 1.5 基本函数指令 - - - - - - - - - - - - - - - - - - -1-811.5.1 平方根指令(SQRT) - - - - - - - - - - - - - - - - - - - - -1-811.5.2 正弦指令(SIN)- - - - - - - - - - - - - - - - - - - - - - -1-831.5.3 余弦指令(COS)- - - - - - - - - - - - - - - - - - - - - - -1-851.5.4 正切指令(TAN)- - - - - - - - - - - - - - - - - - - - - - -1-871.5.5 反正弦指令(ASIN) - - - - - - - - - - - - - - - - - - - - -1-881.5.6 反余弦指令(ACOS) - - - - - - - - - - - - - - - - - - - - -1-891.5.7 反正切指令(ATAN) - - - - - - - - - - - - - - - - - - - - -1-901.5.8 指数指令(EXP)- - - - - - - - - - - - - - - - - - - - - - -1-921.5.9 自然对数指令(LN) - - - - - - - - - - - - - - - - - - - - -1-931.5.10 常用对数指令(LOG)- - - - - - - - - - - - - - - - - - - - -1-94 1.6 数据操作指令 - - - - - - - - - - - - - - - - - - -1-951.6.1 位循环左移指令(ROTL) - - - - - - - - - - - - - - - - - - -1-951.6.2 位循环右移指令(ROTR) - - - - - - - - - - - - - - - - - - -1-971.6.3 位传送指令(MOVB) - - - - - - - - - - - - - - - - - - - - -1-991.6.4 字传送指令(MOVW) - - - - - - - - - - - - - - - - - - - - 1-1011.6.5 替换传送指令(XCHG) - - - - - - - - - - - - - - - - - - - 1-1031.6.6 表初始化指令(SETW) - - - - - - - - - - - - - - - - - - - 1-1051.6.7 字节字展开指令(BEXTD)- - - - - - - - - - - - - - - - - 1-1071.6.8 字字节压缩指令(BPRESS) - - - - - - - - - - - - - - - - 1-1091.6.9 数据检索指令(BSRCH)- - - - - - - - - - - - - - - - - - - 1-1111.6.10 分类指令(SORT) - - - - - - - - - - - - - - - - - - - - - 1-1131.6.11 位左移指令(SHFTL)- - - - - - - - - - - - - - - - - - - - 1-1141.6.12 位右移指令(SHFTR)- - - - - - - - - - - - - - - - - - - - 1-1161.6.13 字复制指令(COPYW)- - - - - - - - - - - - - - - - - - - - 1-1171.6.14 字节交换指令(BSWAP)- - - - - - - - - - - - - - - - - - - 1-1191.7 DDC指令- - - - - - - - - - - - - - - - - - - - - -1-1211.7.1 死区A指令(DZA) - - - - - - - - - - - - - - - - - - - - -1-1211.7.2 死区B指令(DZB) - - - - - - - - - - - - - - - - - - - - -1-1231.7.3 上下限值指令(LIMIT) - - - - - - - - - - - - - - - - - - -1-1251.7.4 PI控制指令(PI) - - - - - - - - - - - - - - - - - - - - -1-1281.7.5 PD控制指令(PD) - - - - - - - - - - - - - - - - - - - - -1-1311.7.6 PID控制指令(PID) - - - - - - - - - - - - - - - - - - - -1-1341.7.7 一阶延迟指令(LAG) - - - - - - - - - - - - - - - - - - - -1-1381.7.8 相位超前滞后指令(LLAG)- - - - - - - - - - - - - - - - - -1-1411.7.9 函数发生器指令(FGN) - - - - - - - - - - - - - - - - - - -1-1441.7.10 反函数发生器指令(IFGN)- - - - - - - - - - - - - - - - - -1-1481.7.11 直线加减速器1指令(LAU) - - - - - - - - - - - - - - - - -1-1521.7.12 直线加减速器2指令(SLAU)- - - - - - - - - - - - - - - - -1-1561.7.13 脉宽调制指令(PWM) - - - - - - - - - - - - - - - - - - - -1-1631.8 表数据操作指令 - - - - - - - - - - - - - - - - - -1-1651.8.1 块调出指令(TBLBR) - - - - - - - - - - - - - - - - - - - -1-1651.8.2 块写入指令(TBLBW) - - - - - - - - - - - - - - - - - - - -1-1671.8.3 行检索指令纵向(TBLSRL)- - - - - - - - - - - - - - - - -1-1691.8.4 列检索指令横向(TBLSRC)- - - - - - - - - - - - - - - - -1-1711.8.5 块清除指令(TBLCL) - - - - - - - - - - - - - - - - - - - -1-1731.8.6 表间块传送指令(TBLMV) - - - - - - - - - - - - - - - - - -1-1751.8.7 Q表调出指令(QTBLR QTBLRI) - - - - - - - - - - - - - - -1-1771.8.8 Q表写入指令(QTBLW QTBLWI) - - - - - - - - - - - - - - -1-1791.8.9 Q指针清除指令(QTBLCL)- - - - - - - - - - - - - - - - - -1-181 2章 系统标准函数指令2.1 信息函数 - - - - - - - - - - - - - - - - - - - - - -2-22.1.1 信息发送函数(MSG-SND) - - - - - - - - - - - - - - - - - - -2-22.1.2 信息接收函数(MSG-RCV) - - - - - - - - - - - - - - - - - - 2-152.2 示踪函数 - - - - - - - - - - - - - - - - - - - - - 2-242.2.1 示踪函数(TRACE) - - - - - - - - - - - - - - - - - - - - - 2-242.2.2 数据示踪调出函数(DTRC-RD) - - - - - - - - - - - - - - - - 2-252.2.3 故障示踪调出函数(FTRC-RD) - - - - - - - - - - - - - - - - 2-282.2.4 变频器示踪调出函数(ITRC-RD) - - - - - - - - - - - - - - - 2-322.3 变频器函数 - - - - - - - - - - - - - - - - - - - - 2-352.3.1 变频器常数写入函数(ICNS-WR) - - - - - - - - - - - - - - - 2-352.3.2 变频器常数调出函数(ICNS-RD) - - - - - - - - - - - - - - - 2-402.4 其他的函数 - - - - - - - - - - - - - - - - - - - - 2-432.4.1 计数函数(COUNTER) - - - - - - - - - - - - - - - - - - - - 2-432.4.2 先进先出函数(FINFOUT) - - - - - - - - - - - - - - - - - - 2-45附录A EXPRESSIONA.1 数式 - - - - - - - - - - - - - - - - - - - - - - - A-2A.1.1 运算符- - - - - - - - - - - - - - - - - - - - - - - - - - - A-2A.1.2 运算对象- - - - - - - - - - - - - - - - - - - - - - - - - - A-4A.1.3 函数- - - - - - - - - - - - - - - - - - - - - - - - - - - - A-4A.2 可识别的表达式种类 - - - - - - - - - - - - - - - - A-5A.2.1 算术运算符- - - - - - - - - - - - - - - - - - - - - - - - - A-5A.2.2 比较运算符- - - - - - - - - - - - - - - - - - - - - - - - - A-5A.2.3 逻辑运算符- - - - - - - - - - - - - - - - - - - - - - - - - A-5A.2.4 赋值运算符- - - - - - - - - - - - - - - - - - - - - - - - - A-6A.2.5 函数- - - - - - - - - - - - - - - - - - - - - - - - - - - - A-6A.2.6 其他- - - - - - - - - - - - - - - - - - - - - - - - - - - - A-6A.3 在梯形图程序中的应用 - - - - - - - - - - - - - - - A-7A.3.1 IF指令句的条件表达式 - - - - - - - - - - - - - - - - - - - A-7A.3.2 WHILE指令句的条件表达式- - - - - - - - - - - - - - - - - - A-7A.3.3 EXPRESSION指令句的运算表达式 - - - - - - - - - - - - - - - A-7本手册的简介本手册详细地说明了支持MP900/MP2000系列(以下称MP系列)的设计与维护的新梯形图编辑器软件的操作方法本手册以充分理解Microsoft Windows 95/98/2000/NT的操作方法的人员为对象关于Windows的打开关闭及鼠标操作Windows应用程序的一般操作等请参阅计算机所附的说明书为了能正确使用新梯形图编辑器请仔细阅读本手册请妥善保管本手册以便需要时参阅本手册的资料构成MP900系列有MP910MP920MP930MP940四种MP2000系列有MP2100和MP2300两种资料构成根据上述产品构成修订相关手册在下一页有介绍敬请参阅相关手册机器控制器MP900/MP2000系列的相关手册包括下表所示的内容请根据需要进行阅读用户手册名资料编号适用机型MP910MP920MP930MP940MP2100MP2300机器控制器MP930用户手册设计与维护篇SI-C887-1.1{机器控制器MP900/MP2000系列用户手册梯形图程序篇SI-C887-1.2{{{{{{机器控制器MP900/MP2000系列用户手册运动程序篇SIZ-C887-1.3{{{{{{机器控制器MP900系列用户手册示教操作器篇SI-C887-1.6{{机器控制器MP920用户手册设计与维护篇SIZ-C887-2.1{机器控制器MP900系列编程装置用软件MPE720用户手册操作说明简易版SIZ-C887-2.3{{{{机器控制器MP920用户手册运动模块篇SIZ-C887-2.5{机器控制器MP920用户手册通讯模块篇SIZ-C887-2.6{机器控制器MP920设置手册EMC 指令用SIBZ-C887-2.50{机器控制器MP910用户手册设计与维护篇SIZ-C887-3.1{机器控制器MP940用户手册设计与维护篇SIZ-C887-4.1{机器控制器MP940设置手册EMC 指令用SIBZ-C887-4.50{机器控制器MP900系列用户手册MECHATROLINK 篇SIZ-C887-5.1{{{{机器控制器MP900系列用户手册260I/F DeviceNet 篇SIZ-C887-5.2{{机器控制器MP900系列MPPanel用户手册SIZ-C887-10.1{{{机器控制器MP900系列MPLogger用户手册SIZ-C887-11.1{{{机器控制器MP900系列MPLoader (Server)用户手册SIZ-C887-12.1{{{机器控制器MP900系列MPLoader (Client)用户手册SIZ-C887-12.2{{{机器控制器MP900/MP2000系列用户手册新梯形图编辑器程序指令篇SIZ-C887-13.1{{{{{{机器控制器MP900/MP2000系列用户手册新梯形图编辑器操作篇SIZ-C887-13.2{{{{{{机器控制器MP2300用户手册基本模块篇SIJPC88070003A{机器控制器MP2300用户手册通讯模块篇SIJPC88070004A{机器控制器MP900/MP2000系列编程装置用用户手册标准版SIJPC88070005A{{{{{{机器控制器MP2100用户手册设计与维护篇SIJPC88070001A{用户手册名资料编号适用机型MP910MP920MP930MP940MP2100MP2300xi本手册的使用方法本手册的使用对象本手册以下列人员为对象进行MP900/MP2000系列系统设计的人员进行MP900/MP2000系列运动程序编程的人员进行MP900/MP2000系列梯形图程序编程的人员缩略语及缩写符号本手册使用如下所示的缩略语及缩写符号PLC机器控制器的总称MPE720编程装置用软件的总称关于软件使用注意事项本软件请在1台特定的电脑上使用需要在其他电脑上使用时请另行购买严禁复制本软件并将其用于编程装置用之外的用途请妥善保管本软件的软盘严禁对本软件进行反编译反汇编未经本公司许可严禁将本软件的一部分或全部转让交换转借给第三者使用注册商标Windows Windows95/98/2000/NT 是美国Microsoft公司的注册商标Pentium 是美国Intel公司的注册商标以太网(Ethernet)是美国Xerox公司的注册商标1-111章梯形图指令本章对继电器电路指令数值运算指令逻辑运算/比较指令程序控制指令基本函数指令数据操作指令DDC 指令以及表数据操作指令进行了说明1章 梯形图指令1.1 继电器电路指令- - - - - - - - - - - - - - - - - - - 1-41.1.1 A 触点指令(NOC) - - - - - - - - - - - - - - - - - - - - - -1-41.1.2 B 触点指令(NCC) - - - - - - - - - - - - - - - - - - - - - -1-51.1.3 接通延时定时器指令(TON[10ms]) - - - - - - - - - - - - - - -1-51.1.4 断开延时定时器指令(TOFF[10ms])- - - - - - - - - - - - - - -1-71.1.5 接通延时定时器指令(TON[1s]) - - - - - - - - - - - - - - - -1-81.1.6 断开延时定时器指令(TOFF[1s])- - - - - - - - - - - - - - - -1-91.1.7 上升脉冲指令(ON-PLS)- - - - - - - - - - - - - - - - - - - 1-101.1.8 下降脉冲指令(OFF-PLS) - - - - - - - - - - - - - - - - - - 1-121.1.9 线圈指令(COIL)- - - - - - - - - - - - - - - - - - - - - - 1-131.1.10 置位线圈指令(S-COIL)- - - - - - - - - - - - - - - - - - - 1-141.1.11 复位线圈指令(R-COIL)- - - - - - - - - - - - - - - - - - - 1-151.2 数值运算指令- - - - - - - - - - - - - - - - - - - -1-161.2.1 存储指令(STORE) - - - - - - - - - - - - - - - - - - - - - 1-161.2.2 加法指令(ADD) - - - - - - - - - - - - - - - - - - - - - - 1-181.2.3 加法扩展指令(ADDX)- - - - - - - - - - - - - - - - - - - - 1-201.2.4 减法指令(SUB) - - - - - - - - - - - - - - - - - - - - - - 1-211.2.5 减法扩展指令(SUBX)- - - - - - - - - - - - - - - - - - - - 1-231.2.6 乘法指令(MUL) - - - - - - - - - - - - - - - - - - - - - - 1-241.2.7 除法指令(DIV) - - - - - - - - - - - - - - - - - - - - - - 1-271.2.8 整型余数指令(MOD) - - - - - - - - - - - - - - - - - - - - 1-291.2.9 实型余数指令(REM) - - - - - - - - - - - - - - - - - - - - 1-301.2.10 增量指令(INC) - - - - - - - - - - - - - - - - - - - - - - 1-311.2.11 减量指令(DEC) - - - - - - - - - - - - - - - - - - - - - - 1-321.2.12 时间加法指令(TMADD) - - - - - - - - - - - - - - - - - - - 1-331.2.13 时间减法指令(TMSUB) - - - - - - - - - - - - - - - - - - - 1-351.2.14 时间经过指令(SPEND) - - - - - - - - - - - - - - - - - - - 1-371.2.15 符号取反指令(INV) - - - - - - - - - - - - - - - - - - - - 1-391章 梯形图指令1-21.2.16 1的补码指令(COM) - - - - - - - - - - - - - - - - - - - - 1-411.2.17 绝对值转换指令(ABS) - - - - - - - - - - - - - - - - - - - 1-421.2.18 2进制转换指令(BIN) - - - - - - - - - - - - - - - - - - - 1-441.2.19 BCD 转换指令(BCD) - - - - - - - - - - - - - - - - - - - - 1-451.2.20 校验转换指令(PARITY)- - - - - - - - - - - - - - - - - - - 1-461.2.21 ASCII 码转换1指令(ASCII) - - - - - - - - - - - - - - - - 1-471.2.22 ASCII 码转换2指令(BINASC)- - - - - - - - - - - - - - - - 1-491.2.23 ASCII 码转换3指令(ASCBIN)- - - - - - - - - - - - - - - - 1-501.3 逻辑运算/比较指令 - - - - - - - - - - - - - - - - 1-511.3.1 逻辑与指令(AND) - - - - - - - - - - - - - - - - - - - - - 1-511.3.2 逻辑或指令(OR)- - - - - - - - - - - - - - - - - - - - - - 1-521.3.3 逻辑异或指令(XOR) - - - - - - - - - - - - - - - - - - - - 1-531.3.4 比较指令() - - - - - - - - - - - - - - - - - - - - - - 1-541.3.5 比较指令(≦) - - - - - - - - - - - - - - - - - - - - - - 1-551.3.6 比较指令() - - - - - - - - - - - - - - - - - - - - - - 1-561.3.7 比较指令() - - - - - - - - - - - - - - - - - - - - - - 1-571.3.8 比较指令(≧) - - - - - - - - - - - - - - - - - - - - - - 1-581.3.9 比较指令() - - - - - - - - - - - - - - - - - - - - - - 1-591.3.10 范围检查指令(RCHK)- - - - - - - - - - - - - - - - - - - - 1-601.4 程序控制指令 - - - - - - - - - - - - - - - - - - - 1-631.4.1 图调用指令(SEE) - - - - - - - - - - - - - - - - - - - - - 1-631.4.2 运动程序调用指令(MSEE)- - - - - - - - - - - - - - - - - - 1-641.4.3 函数调用指令(FUNC)- - - - - - - - - - - - - - - - - - - - 1-651.4.4 连续执行型直接输入指令(INS) - - - - - - - - - - - - - - - 1-661.4.5 连续执行型直接输出指令(OUTS)- - - - - - - - - - - - - - - 1-691.4.6 扩展程序执行指令(XCALL) - - - - - - - - - - - - - - - - - 1-711.4.7 WHILE 指令(WHILE END_WHILE)- - - - - - - - - - - - - - - 1-721.4.8 IF 指令(IFEND_IF) - - - - - - - - - - - - - - - - - - - 1-741.4.9 IF 指令(IF ELSE END_IF) - - - - - - - - - - - - - - - - 1-761.4.10 FOR 指令(FOR END_FOR)- - - - - - - - - - - - - - - - - - 1-781.4.11 EXPRESSION 指令(EXPRESSION) - - - - - - - - - - - - - - - 1-801.5 基本函数指令 - - - - - - - - - - - - - - - - - - - 1-811.5.1 平方根指令(SQRT)- - - - - - - - - - - - - - - - - - - - - 1-811.5.2 正弦指令(SIN) - - - - - - - - - - - - - - - - - - - - - - 1-831.5.3 余弦指令(COS) - - - - - - - - - - - - - - - - - - - - - - 1-851.5.4 正切指令(TAN) - - - - - - - - - - - - - - - - - - - - - - 1-871.5.5 反正弦指令(ASIN)- - - - - - - - - - - - - - - - - - - - - 1-881.5.6 反余弦指令(ACOS)- - - - - - - - - - - - - - - - - - - - - 1-891.5.7 反正切指令(ATAN)- - - - - - - - - - - - - - - - - - - - - 1-901.5.8 指数指令(EXP) - - - - - - - - - - - - - - - - - - - - - - 1-921.5.9 自然对数指令(LN)- - - - - - - - - - - - - - - - - - - - - 1-931.5.10 常用对数指令(LOG) - - - - - - - - - - - - - - - - - - - - 1-941.6 数据操作指令 - - - - - - - - - - - - - - - - - - - 1-951.6.1 位循环左移指令(ROTL)- - - - - - - - - - - - - - - - - - - 1-951.6.2 位循环右移指令(ROTR)- - - - - - - - - - - - - - - - - - - 1-971.6.3 位传送指令(MOVB)- - - - - - - - - - - - - - - - - - - - - 1-991.6.4 字传送指令(MOVW)- - - - - - - - - - - - - - - - - - - - -1-1011.6.5 替换传送指令(XCHG)- - - - - - - - - - - - - - - - - - - -1-1031.6.6 表初始化指令(SETW)- - - - - - - - - - - - - - - - - - - -1-1051-31 1.6.7 字节字展开指令(BEXTD)- - - - - - - - - - - - - - - - - 1-107 1.6.8 字字节压缩指令(BPRESS) - - - - - - - - - - - - - - - - 1-1091.6.9 数据检索指令(BSRCH)- - - - - - - - - - - - - - - - - - - 1-1111.6.10 分类指令(SORT) - - - - - - - - - - - - - - - - - - - - - 1-1131.6.11 位左移指令(SHFTL)- - - - - - - - - - - - - - - - - - - - 1-1141.6.12 位右移指令(SHFTR)- - - - - - - - - - - - - - - - - - - - 1-1161.6.13 字复制指令(COPYW)- - - - - - - - - - - - - - - - - - - - 1-1171.6.14 字节交换指令(BSWAP)- - - - - - - - - - - - - - - - - - - 1-1191.7 DDC 指令- - - - - - - - - - - - - - - - - - - - - 1-1211.7.1 死区A 指令(DZA)- - - - - - - - - - - - - - - - - - - - - 1-1211.7.2 死区B 指令(DZB)- - - - - - - - - - - - - - - - - - - - - 1-1231.7.3 上下限值指令(LIMIT)- - - - - - - - - - - - - - - - - - - 1-1251.7.4 PI 控制指令(PI) - - - - - - - - - - - - - - - - - - - - - 1-1281.7.5 PD 控制指令(PD) - - - - - - - - - - - - - - - - - - - - - 1-1311.7.6 PID 控制指令(PID) - - - - - - - - - - - - - - - - - - - - 1-1341.7.7 一阶延迟指令(LAG)- - - - - - - - - - - - - - - - - - - - 1-1381.7.8 相位超前滞后指令(LLAG) - - - - - - - - - - - - - - - - - 1-1411.7.9 函数发生器指令(FGN)- - - - - - - - - - - - - - - - - - - 1-1441.7.10 反函数发生器指令(IFGN) - - - - - - - - - - - - - - - - - 1-1481.7.11 直线加减速器1指令(LAU)- - - - - - - - - - - - - - - - - 1-1521.7.12 直线加减速器2指令(SLAU) - - - - - - - - - - - - - - - - 1-1561.7.13 脉宽调制指令(PWM)- - - - - - - - - - - - - - - - - - - - 1-1631.8 表数据操作指令 - - - - - - - - - - - - - - - - - 1-1651.8.1 块调出指令(TBLBR)- - - - - - - - - - - - - - - - - - - - 1-1651.8.2 块写入指令(TBLBW)- - - - - - - - - - - - - - - - - - - - 1-167 1.8.3 行检索指令纵向(TBLSRL) - - - - - - - - - - - - - - - - 1-169 1.8.4 列检索指令横向(TBLSRC) - - - - - - - - - - - - - - - - 1-1711.8.5 块清除指令(TBLCL)- - - - - - - - - - - - - - - - - - - - 1-1731.8.6 表间块传送指令(TBLMV)- - - - - - - - - - - - - - - - - - 1-1751.8.7 Q 表调出指令(QTBLR QTBLRI) - - - - - - - - - - - - - - - 1-1771.8.8 Q 表写入指令(QTBLW QTBLWI) - - - - - - - - - - - - - - - 1-1791.8.9 Q 指针清除指令(QTBLCL)- - - - - - - - - - - - - - - - - - 1-1811章 梯形图指令1.1.1 A 触点指令(NOC)1-41.1继电器电路指令1.1.1A 触点指令(NOC)概要映像寄存器的值为1(ON)时将位输出置为ON 反之映像寄存器的值为0(OFF)时将位输出置为OFF格式参数程序举例当MB000100 ON 时MB000101为ON 标记NOC 全称NO Contact 类别RELAY 图标参数名称设定继电器编号所有比特型寄存器同上带下标字母1.1 继电器电路指令1-511.1.2B 触点指令(NCC)概要映像寄存器的值为1(ON)时将位输出置为OFF反之映像寄存器的值为0(OFF)时将位输出置为ON格式参数程序举例当MB000100 ON时MB000101为OFF1.1.3接通延时定时器指令(TON[10ms])概要位输入为ON时进行计时当计数值设定值时位输出为ON计数中位输入为OFF时停止计时位输入再次为ON时从(0)开始计数同时计数用的寄存器中存储实际计数时间(以10ms 为单位)的值标记NCC 全称NC Contact 类别RELAY 图标参数名称设定继电器编号所有比特型寄存器同上带下标字母1章 梯形图指令1.1.3 接通延时定时器指令(TON[10ms])1-6格式参数程序举例MW00011作为计时器的计数用寄存器而工作为避免重复请务必设定未使用的寄存器标记TON[10ms]全称On-Delay Timer[10ms]类别RELAY 图标参数名称设定Set(设定值)所有整型寄存器同上带下标字母(065535(655.35s)10ms 刻度)常数Count(计数值)整型寄存器(#C 寄存器除外)同上带下标字母1.1 继电器电路指令1-711.1.4断开延时定时器指令(TOFF[10ms])概要位输入为OFF 时进行计时当计数值设定值时位输出为OFF计数中最近的位输入为ON 时停止计时位输入再次为OFF时从(0)开始计数同时计数用的寄存器中存储实际计数时间(以10ms 为单位)的值格式参数程序举例标记TOFF[10ms]全称Off-Delay Timer[10ms]类别RELAY 图标参数名称设定Set(设定值)所有整型寄存器同上带下标字母(065535(655.35s)10ms 刻度)常数Count(计数值)整型寄存器(#C 寄存器除外)同上带下标字母1章 梯形图指令1.1.5 接通延时定时器指令(TON[1s])1-8MW00011作为计时器的计数用寄存器而工作为避免重复请务必设定未使用的寄存器1.1.5接通延时定时器指令(TON[1s])概要位输入为ON 时进行计时当计数值设定值时,位输出为ON 计数中最近的位输入为OFF时停止计时位输入再次为ON时从(0)开始计数同时计数用的寄存器中存储实际计数时间(以1s 为单位)的值格式参数程序举例标记TON[1s]全称On-Delay Timer[1s]类别RELAY 图标参数名称设定Set(设定值)所有整型寄存器同上带下标字母(065535s 1s 刻度)常数Count(计数值)整型寄存器(#C 寄存器除外)同上带下标字母1.1 继电器电路指令1MW00011作为计时器的计数用寄存器而工作为避免重复请务必设定未使用的寄存器1.1.6断开延时定时器指令(TOFF[1s])概要位输入为OFF 时进行计时当计数值设定值时位输出为OFF 计数中位输入为OFF时停止计时位输入再次为ON时从(0)开始计数同时计数用的寄存器中存储实际计数时间(以1s 为单位)的值格式参数标记TOFF[1s]全称Off-Delay Timer[1s]类别RELAY图标参数名称设定Set(设定值)所有整型寄存器同上带下标字母(065535s1s 刻度)常数Count(计数值)整型寄存器(#C 寄存器除外)同上带下标字母1章 梯形图指令1.1.7 上升脉冲指令(ON-PLS)程序举例MW00011作为计时器的计数用寄存器而工作为避免重复请务必设定未使用的寄存器1.1.7上升脉冲指令(ON-PLS)概要位输入状态从OFF 变为ON时位输出在一个扫描周期内为ON指定的寄存器用于保存位输出上次的值格式参数标记ON-PLS 全称Rise Pulse 类别RELAY图标参数名称设定用于保存位输入上次值的寄存器编号比特型寄存器(#C 寄存器除外)同上带下标字母1.1 继电器电路指令1程序举例当IB00001从OFF 变为ON 时MB000101在一个扫描周期内为ON MB000100用于保存IB00001上次的值表1.1表示上升脉冲指令的寄存器状态(注)在该程序举例中检测出的并非MB000100的上升而是IB00001的上升MB000100仅用于保存IB00001上次的值表1.1 上升脉冲指令的寄存器状态输入结果IB00001MB000100(IB00001上次的值)MB000100(IB00001的保存)MB000100OFF OFF OFF OFF OFF ON OFF OFF ON OFF ON ON ONONONOFF1章 梯形图指令1.1.8 下降脉冲指令(OFF-PLS)1.1.8下降脉冲指令(OFF-PLS)概要位输入从ON 变为OFF时位输出在一个扫描周期内为ON指定的寄存器用于保存位输出上次的值格式参数程序举例当IB00001从ON 变为OFF 时MB000101在一个扫描周期内为ON MB000100用于保存IB00001上次的值标记OFF-PLS 全称Fall Pulse 类别RELAY图标参数名称设定用于保存位输入上次值的寄存器编号比特型寄存器(#C 寄存器除外)同上带下标字母1.1 继电器电路指令1表1.2表示下降脉冲指令的寄存器状态(注)在该程序举例中检测出的并非MB000100的下降而是IB00001的下降MB000100仅用于保存IB00001上次的值1.1.9线圈指令(COIL)概要位输入ON 时将映像寄存器的值置为1(ON)位输入OFF时置为0(OFF)格式参数程序举例MB000100为ON时MB000101为ON表1.2 下降脉冲指令的寄存器状态输入结果IB00001MB000100(IB00001上次的值)MB000100(IB00001的保存)MB000101OFF OFF OFFOFF OFF ONOFF ON ON OFF ON OFF ONONONOFF标记COIL 全称Coil 类别RELAY图标参数名称设定线圈编号比特型寄存器(#C 寄存器除外)同上带下标字母1章 梯形图指令1.1.10 置位线圈指令(S-COIL)1.1.10置位线圈指令(S-COIL)概要执行条件成立时将输出置为ON并保持ON的状态格式参数程序举例多次指定同一输出地点时上例将进行如下动作* OB00000为OFF 时在置位线圈指令下OB00000为ON 状态标记S-Coil 全称Set Coil 类别RELAY图标参数名称设定线圈编号比特型寄存器(#C 寄存器除外)同上带下标字母1.1 继电器电路指令11.1.11复位线圈指令(R-COIL)概要执行条件成立时将输出置为OFF并保持OFF的状态格式参数程序举例多次指定同一输出地点时上例将进行如下动作* OB00000为ON 时在复位线圈指令下OB00000为OFF 状态标记R-Coil 全称Reset Coil 类别RELAY图标参数名称设定线圈编号比特型寄存器(#C 寄存器除外)同上带下标字母1章 梯形图指令1.2.1 存储指令(STORE)1.2数值运算指令1.2.1存储指令(STORE)概要将Source 存储在Dest中格式参数标记STORE 全称Store 类别MATH图标参数名称设定Source所有整型长整型实型寄存器同上带下标字母下标寄存器常数Dest整型长整型实型寄存器(#C 寄存器除外)同上带下标字母下标寄存器1.2 数值运算指令1程序将长整型的数据存储到整型寄存器中时直接保留低16位存储的数据即使超出整数范围(-3276832767)也不会发生运算错误敬请注意1章 梯形图指令1.2.2 加法指令(ADD)1.2.2加法指令(ADD)概要进行整型长整型实型数的加法运算给Source A 加上Source B将其结果存储在Dest中整型的运算结果大于32767时发生数据上溢的运算错误长整型的运算结果大于2147483647时发生数据上溢的运算错误格式参数标记ADD 全称Add 类别MATH图标参数名称设定Source A所有整型长整型实型寄存器同上带下标字母下标寄存器常数Source B 所有整型长整型实型寄存器同上带下标字母下标寄存器常数Dest整型长整型实型寄存器(#C 寄存器除外)同上带下标字母下标寄存器1程序举例整型数的加法运算实型数的加法运算长整型的加减法指令(---)通常为32位但在余数补偿运算表达式(前一指令为乘法指令()后一指令为除法指令())中使用时为64位运算1.2.3 加法扩展指令(ADDX)1.2.3加法扩展指令(ADDX)概要进行整型长整型数的加法运算给Source A 加上Source B 将其结果存储在Dest中即使运算结果数据上溢也不会发生运算错误格式参数程序举例在整型数的加法运算中为避免发生运算错误而使用长整型的加减法指令(---)通常为32位但在余数补偿运算表达式(前一指令为乘法指令()后一指令为除法指令())中使用时为64位运算标记ADDX 全称Extended Add 类别MATH图标参数名称设定Source A所有整型长整型实型寄存器同上带下标字母下标寄存器常数Source B 所有整型长整型实型寄存器同上带下标字母下标寄存器常数Dest整型长整型实型寄存器(#C 寄存器除外)同上带下标字母下标寄存器11.2.4减法指令(SUB)概要进行整型长整型实型数的减法运算从Source A 减去Source B将其结果存储在Dest中整型的减法运算结果小于-32768时发生数据下溢的运算错误长整型的减法运算结果小于-2147483648时发生数据下溢的运算错误格式参数标记SUB 全称Subtract 类别MATH图标参数名称设定Source A所有整型长整型实型寄存器同上带下标字母下标寄存器常数Source B 所有整型长整型实型寄存器同上带下标字母下标寄存器常数Dest整型长整型实型寄存器(#C 寄存器除外)同上带下标字母下标寄存器1.2.4 减法指令(SUB)程序举例整型数的减法运算实型数的减法运算长整型的加减法指令(---)通常为32位但在余数补偿运算表达式(前一指令为乘法指令()后一指令为除法指令())中使用时为64位运算11.2.5减法扩展指令(SUBX)概要进行整型长整型数的减法运算即使运算结果数据下溢也不会发生运算错误格式参数程序举例在整型数的减法运算中为避免发生运算错误而使用长整型的加减法指令(---)通常为32位但在余数补偿运算表达式(前一指令为乘法指令()后一指令为除法指令())中使用时为64位运算标记SUB 全称Subtract 类别MATH图标参数名称设定Source A所有整型长整型实型寄存器同上带下标字母下标寄存器常数Source B 所有整型长整型实型寄存器同上带下标字母下标寄存器常数Dest整型长整型实型寄存器(#C 寄存器除外)同上带下标字母下标寄存器1.2.6 乘法指令(MUL)1.2.6乘法指令(MUL)概要进行整型长整型实型数的乘法运算Source A 乘以Source B将其结果存储在Dest中格式参数标记MUL 全称Multiply 类别MATH图标参数名称设定Source A所有整型长整型实型寄存器同上带下标字母下标寄存器常数Source B 所有整型长整型实型寄存器同上带下标字母下标寄存器常数Dest整型长整型实型寄存器(#C 寄存器除外)同上带下标字母下标寄存器1程序举例整型数的乘法运算长整型数的乘法运算1.2.6 乘法指令(MUL)实型数的乘法运算长整型的加减法指令(---)通常为32位但在余数补偿运算表达式(前一指令为乘法指令()后一指令为除法指令())中使用时为64位运算11.2.7除法指令(DIV)概要进行整型长整型实型数的除法运算Source A 除以Source B将其结果存储在Dest中格式参数标记DIV 全称Divide 类别MATH图标参数名称设定Source A所有整型长整型实型寄存器同上带下标字母下标寄存器常数Source B 所有整型长整型实型寄存器同上带下标字母下标寄存器常数Dest整型长整型实型寄存器(#C 寄存器除外)同上带下标字母下标寄存器1.2.7 除法指令(DIV)程序举例实型数的除法运算11.2.8整型余数指令(MOD)概要将整型长整型除法运算的余数存储在Dest中请在除法指令后立即执行若不在除法指令后立即执行其后到下次数值运算指令出现之间的运算结果将无法保证格式参数程序举例将整型除法运算的商存储在MW00101中余数存储在MW00102中标记MOD全称Integer Remainder 类别MATH图标参数名称设定Dest整型长整型实型寄存器(#C 寄存器除外)同上带下标字母下标寄存器1.2.9 实型余数指令(REM)1.2.9实型余数指令(REM)概要将实型除法运算的余数存储在Dest中此时所谓的余数是指从Source 连续减去Base所得的剩余即假设连续减去的次数为n则得到如下结果DestSource(Basen)(0≦DestBase)格式参数程序举例求出MF00200除以常数1.5的余数将其结果存储在DF00202中标记REM全称Real Remainder 类别MATH图标参数名称设定Source所有实型寄存器同上带下标字母常数Base所有实型寄存器同上带下标字母常数Dest实型寄存器(#C 寄存器除外)同上带下标字母11.2.10增量指令(INC)概要给整型长整型寄存器加1整型时加法运算结果即使大于32767也不会发生数据上溢的运算错误同样长整型也不会发生数据上溢的运算错误格式参数程序举例整型标记INC 全称Increment 类别MATH图标参数名称设定Dest整型长整型寄存器(#C 寄存器除外)同上带下标字母下标寄存器1.2.11 减量指令(DEC)长整型1.2.11减量指令(DEC)概要从整型长整型寄存器中减1整型时减法运算结果即使小于-32768也不会发生数据下溢的运算错误同样长整型也不会发生数据下溢的运算错误格式参数标记DEC 全称Decrement 类别MATH图标参数名称设定Dest整型长整型寄存器(#C 寄存器除外)同上带下标字母下标寄存器1程序举例整型长整型1.2.12时间加法指令(TMADD)概要进行两个时间数据(时/分/秒)的加法运算给Dest 加上Source(加时间)将其结果存储在Dest中Source 和Dest 的数据格式如下表1.3 数据格式寄存器偏置数据内容数据范围(BCD)0时/分高位字节(时)023低位字节(分)0591秒00000059。
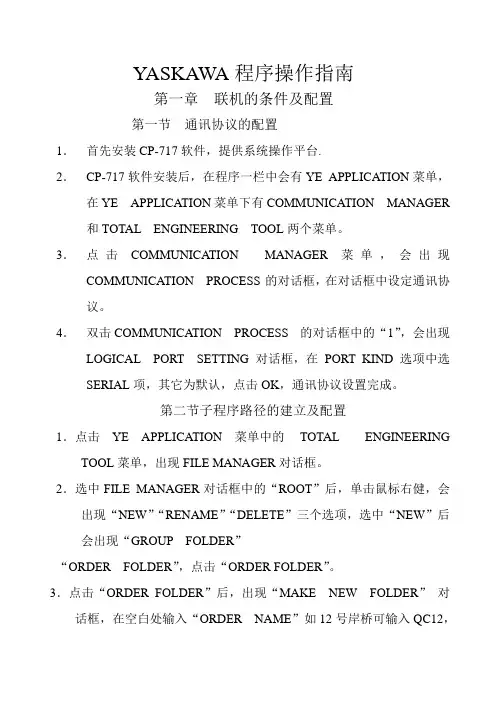
YASKAWA程序操作指南第一章联机的条件及配置第一节通讯协议的配置1.首先安装CP-717软件,提供系统操作平台.2.CP-717软件安装后,在程序一栏中会有YE APPLICATION菜单,在YE APPLICATION菜单下有COMMUNICATION MANAGER和TOTAL ENGINEERING TOOL两个菜单。
3.点击COMMUNICATION MANAGER菜单,会出现COMMUNICATION PROCESS 的对话框,在对话框中设定通讯协议。
4.双击COMMUNICATION PROCESS 的对话框中的“1”,会出现LOGICAL PORT SETTING对话框,在PORT KIND选项中选SERIAL项,其它为默认,点击OK,通讯协议设置完成。
第二节子程序路径的建立及配置1.点击YE APPLICATION 菜单中的TOTAL ENGINEERING TOOL菜单,出现FILE MANAGER对话框。
2.选中FILE MANAGER对话框中的“ROOT”后,单击鼠标右健,会出现“NEW”“RENAME”“DELETE”三个选项,选中“NEW”后会出现“GROUP FOLDER”“ORDER FOLDER”,点击“ORDER FOLDER”。
3.点击“ORDER FOLDER”后,出现“MAKE NEW FOLDER”对话框,在空白处输入“ORDER NAME”如12号岸桥可输入QC12,然后回车。
4.选中QC12单击鼠标右健,会弹出“CREATE NEW FOLDER”“RENAME”“DELETE”三个选项,选中“CREATE NEW FOLDER”后会弹出“CONTROLLER FOLDER”单击“CONTROLLER FOLDER”。
5.单击“CONTROLLER FOLDER”,弹出“CONTROLLER CONFIGARATION”对话框,在“INFORMATION”目录下第一个“CONTROLLER”框中一般根据此控制器所处的网络号和站号编名如“N01S01”即一号网络一号站;“COMMENT”可不填写;第二个“CONTROLLER”为控制器的类型如“CP-317”“CP-316H”“CP-916A”“RIO2000”等等,一般“N01S01”的控制器的类型QC选“CP-317”,RTG选“CP-316H”。

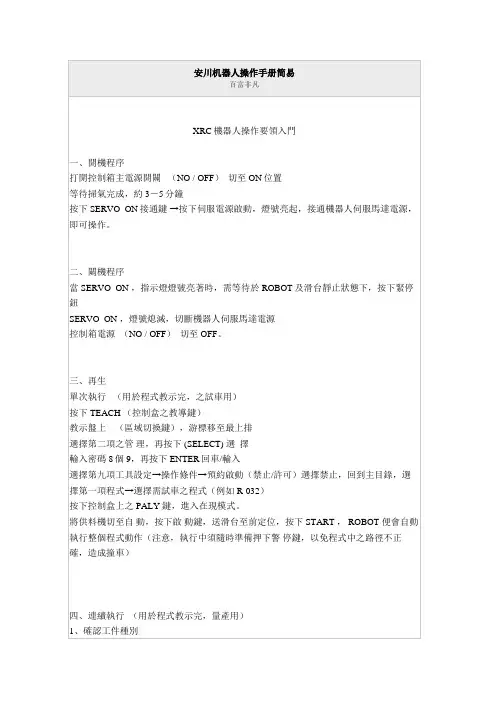
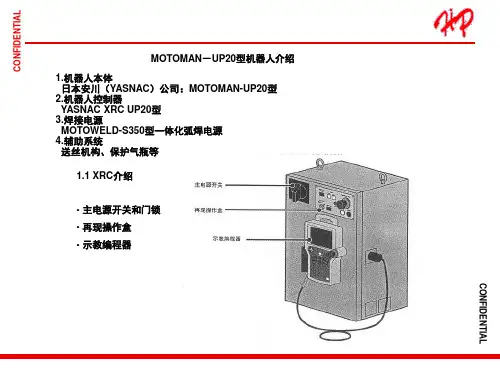
安川机器人操作手册简易百富非凡XRC機器人操作要領入門一、開機程序打開控制箱主電源開關(NO / OFF)切至 ON位置等待掃氣完成,約3-5分鐘按下SERVO ON接通鍵→按下伺服電源啟動,燈號亮起,接通機器人伺服馬達電源,即可操作。
二、關機程序當SERVO ON ,指示燈燈號亮著時,需等待於ROBOT及滑台靜止狀態下,按下緊停鈕SERVO ON ,燈號熄滅,切斷機器人伺服馬達電源控制箱電源(NO / OFF)切至 OFF。
三、再生單次執行(用於程式教示完,之試車用)按下 TEACH (控制盒之教導鍵)教示盤上(區域切換鍵),游標移至最上排選擇第二項之管理,再按下 (SELECT) 選擇輸入密碼8個9,再按下 ENTER回車/輸入選擇第九項工具設定→操作條件→預約啟動(禁止/許可)選擇禁止,回到主目錄,選擇第一項程式→選擇需試車之程式(例如R-032)按下控制盒上之 PALY 鍵,進入在現模式。
將供料機切至自動,按下啟動鍵,送滑台至前定位,按下START , ROBOT 便會自動執行整個程式動作(注意,執行中須隨時準備押下警停鍵,以免程式中之路徑不正確,造成撞車)四、連續執行(用於程式教示完,量產用)1、確認工件種別按下TEACH →按下教示盤上之游標移至最上排選擇第二項之管理,再按下 (SELECT) 選擇輸入8個9,再按下 ENTER回車/輸入選擇第九大項工具設置→操作條件→預約啟動(禁止/許可)選擇(禁止),選擇再回到主目錄第一項,選擇啟動→程序名→選擇程式名稱。
2、執行再生到主目錄第一項,選擇啟動→程序名→選擇程式名稱按下控制盒上之 PLAY鍵將供料機切換至自動模式下按下供料機啟動鍵,供料機旋轉至定位,機器人便會自動執行整個程式動作。
五、教示之程式試運轉(程式教示完之手動再生)按下控制盒上之 TEACH選擇第一大項主菜單,選擇程式選擇要試運轉之程式,(例如:R-032)將供料機切換至自動模式,以自動啟動鍵,送供料機轉至前定位,同時按下教示盤上之 INTER LOCK 及 TEST START ,ROBOT 便會開始執行程式,放開即停止,(完全執行整個程式內容)六、程式撰寫按下控制盒上之SERVO ON ,燈號亮起按下控制盒上之 TEACH教示選擇主菜單上之程式,選擇新建程序輸入程式名稱,(例如:R-032)按下 ENTER,移動游標至最下行,選擇執行0000 NOP0001 MOVJ VJ=100 需有第一點製作,按下ENTER,(程式原點)0002 MOVL V=800 路徑之第二點0003 MOVL V=800 路徑第三點0004 MOVL V=800 路徑第四點0005 MOVL V=800 路徑第五點:↓0010 MOVL V=800 路徑第十點0011 MOVJ VJ=100 回到程式原點12 END註:程式選寫前,先決定執行者教示時ROBOT之運動模式押下教示盤COORD座標系選擇關節直角工具使用者↓↓↓↓各軸滑台工件角度自設↓程式選寫時之路徑決定修改路徑0000 NOP0001 MOVJ VJ=1000002 MOVL V=800 將游標移至行號0003 MOVL V=800 移動ROBOT至欲修改之位置押下MODIFY(變更鍵)押下ENTER (輸入鍵)修改速度0000 NOP0001 MOVJ VJ=1000002 MOVL V=800 將游標移至命令上0003 MOVL V=800 押下選擇MOVL V=800將游標移至速度上押下選擇鍵 V=輸入欲修之速度 V=1000押下ENTER確認 MOVL V=1000確認後再押下ENTER0000 NOP0001 MOVJ VJ=1000002 MOVL V=10000003 MOVL V=800插入路徑0000 NOP0001 MOVJ VJ=1000002 MOVL V=800(P1) 將ROBOT移至欲增加的點上0003 MOVL V=800 教示新的位置押下 INSERT (插入鍵)再押下 ENTER(輸入鍵)0000 NOP0001 MOVJ VJ=1000002 MOVL V=800(P1)新插入之路徑會增加在0003 MOVL V=800 (P2) 游標選擇之行號之下0004 MOVL V=800刪除路徑0000 NOP0001 MOVJ VJ=1000002 MOVL V=800(P1)將游標移至欲刪除之行號上0003 MOVL V=800(P2)押下 DELETE(刪除鍵)0004 MOVL V=800 再押 ENTER (輸入/回車鍵)0000 NOP0001 MOVJ VJ=1000002 MOVL V=800(P2)0003 MOVL V=800CALL副程式0000 NOP0001 MOVJ VJ=1000002 MOVL V=800 將游標選擇行號,按下 INFORM LIST 0003 MOVL V=800 (指令一覽表)按選擇鍵: CALL:JOB(程式)選擇JOB↓0010 MOVL V=800 選擇須要之副程式【例:(AT-ON)】0011 MOVJ VJ=100 押下選擇 CALL:(AT-ON)0012 END 押下 INSERT(插入鍵)押下 ENTER▼0000 NOP0001 MOVJ VJ=1000002 MOVL V=800 (副程式會自動加在指定行號之下)0003 CALL :(AT-ON)0003 MOVL V=800:↓0010 MOVL V=8000011 MOVJ VJ=1000012 END 行號自動加一範例:(供料機)0000 NOP 需先選擇(機器人移動座標系)方式及程式路徑(運動速度與方式)。
资料编号SICP S800000 45C用户手册设计²维护篇模拟量电压²脉冲序列指令型/旋转型©-V系列伺服单元SGDV伺服电机SGMJV/SGMAV/SGMPS/SGMGV/SGMSV/SGMCSAC伺服驱动器概要面板操作器接线和连接试运行运行调整辅助功能(Fn□□□监视显示(Un□□□全闭环控制故障诊断附录版权所有© 2007 株式会社安川电机未经本公司的书面许可,禁止转载或复制本书的部分或全部内容。
iii请事先务必阅读本手册是对©-V 系列伺服单元的设计、维护所需的信息进行说明的手册。
进行设计、维护时,请务必参照本手册,正确进行作业。
请妥善保管本手册,以便在需要时可以随时查阅。
除本手册外,请根据使用目的阅读下页所示的相关资料。
本手册使用的基本术语如无特别说明,本手册使用以下术语。
关于重要说明对于需要特别注意的说明,标示了以下符号。
本手册的书写规则在本手册中,反信号名(L 电平时有效的信号通过在信号名前加(/来表示。
<例>S-ON 书写为/S-ON。
基本术语意义伺服电机©-V 系列的SGMJV、SGMAV、SGMPS、SGMGV、SGMSV、SGMCS (直接驱动型伺服电机伺服单元©-V 系列的SGDV 型伺服放大器伺服驱动器伺服电机与伺服放大器的配套伺服系统由伺服驱动器和上位装置以及外围装置配套而成的一套完整的伺服控制系统模拟量²脉冲型伺服单元的接口规格为模拟量电压²脉冲序列指令型M-ⅠⅠ型伺服单元的接口规格为MECHATROLINK-II 通信指令型²表示说明中特别重要的事项。
也表示可能会引起警报等,但还不至于造成装置损坏的轻度注意事项。
iv©-V 系列的相关资料请根据使用目的,阅读所需的资料。
资料名称机型和外围设备的选型想了解额定值与特性进行系统设计进行柜内安装与接线进行试运行进行试运行²伺服调整进行维护和检查©-V 系列用户手册设定篇旋转型(资料编号∶ SICPS80000043AC 伺服驱动器©-V 系列综合样本(资料编号∶ KACPS80000042©-V 系列用户手册数字操作器操作篇(日文版(资料编号∶ SIJPS80000055©-V 系列AC 伺服单元SGDV安全注意事项(资料编号∶ TOBPC71080010© 系列数字操作器安全注意事项(资料编号∶ TOBPC73080000AC 伺服电机安全注意事项(资料编号∶ TOBPC23020000v与安全有关的标记说明本手册根据与安全有关的内容,使用了下列标记。
安川MOTOMAN工业机器人编程与操作(3)机械手的运动通常用两种坐标来操作机械人:关节坐标和直角坐标。
按示教盒上的坐标轴操作键,操作机械手的每一根轴。
•关节坐标•直角坐标•运动指令和步骤•机械手使用作业指令来实现运动和执行再现,这些指令叫做运动指令。
目的位置,插补方法,运行速度等等信息都记录在运动指令中。
叫做运动指令的原因是,主体指令都是以“MOV”开始。
“MOV”是一种用于XRC 系统中的“INFORM Ⅱ”语言。
比如:MOVJ VJ=50.00MOVL V=1122 PL=1从一条运动指令到下一条运动指令为一步。
步骤1为001,步骤2为002,步骤3为003,等等。
步骤1的位置即为记录有步骤号001(S: 001)的运动指令处的位置。
例如:参照下面的作业的内容,当执行再现时,机械手由步骤1向步骤2运动,运动速度记录在步骤2的运动指令中。
在机械手到了步骤2之后,机械手执行TIMER指令,再执行DOUT指令,然后继续执行步骤3。
示教•示教前的准备工作示教前应做下面准备工作:按下再现面板上的[REMOTE]按钮,使灯灭按下[TEACH] 按钮(在面板上),设置示教模式按下[TEACH LOCK]键(在示教盒上),锁住示教模式(示教锁,确保安全)输入作业名称(1)确保再现面板上的[REMOTE]按钮没有点亮了,如点亮了,按下[REMOTE]按钮关掉,这样再现面板就可以操作了。
灯亮——遥控操作灯灭——本地面板操作(2)在再现面板上,按下[TEACH]按钮进入示教模式。
(3)按下[TEACH LOCK]键。
如果按下[TEACH LOCK]键,该按钮将点亮。
这样一来,通过再现面板或外部输入设备,就不能改变操作模式和操作过程。
另外,如果[TEACH LOCK]键没有点亮,使用紧急制动开关,不能开启伺服电源。
(4)在顶部菜单中选择{JOB},并在子菜单中选择{CREATE NEW JOB}。
这时将显示输入行。