电动轮驱动汽车电子差速控制策略及仿真
- 格式:pdf
- 大小:544.00 KB
- 文档页数:6
轮毂式电动汽车电子差速复合控制方法随着电动汽车技术的不断发展,轮毂式电动汽车作为一种新兴的驱动方式逐渐受到人们的关注。
这种驱动方式通过电动机直接驱动车轮,摆脱了传统汽车中的传动系统,从而具备了更高的效率和动力输出。
然而,由于轮毂式电动汽车的工作方式与传统汽车有所不同,特别是在差速器控制方面存在一些挑战。
因此,研究轮毂式电动汽车电子差速复合控制方法成为了重要的课题。
一、电子差速的原理和作用在传统的汽车中,差速器的作用是平衡车轮转速差异,使得在转弯等情况下两个驱动轮能够保持合适的转速,并提供车辆稳定性和操控性。
然而,在轮毂式电动汽车中,每个车轮都被电动机直接驱动,差速器的作用被电子差速系统所取代。
电子差速系统通过电控单元感知车轮速度和转向角度等信息,实时计算每个轮子的电机输出扭矩,从而实现差速控制。
通过精确控制每个轮子的扭矩输出,可以使车辆在转弯等情况下保持平稳,并提高车辆的操控性能。
二、电子差速复合控制方法1. 轮毂电机扭矩分配控制方法轮毂电机扭矩分配控制方法是电子差速复合控制方法中的核心。
该方法通过对每个轮子的电机输出扭矩进行控制,实现差速控制。
具体而言,可以通过根据传感器获取的数据计算每个轮子的实时速度、转向角度和车辆的状态等信息,然后利用反馈控制算法,计算出每个轮子应该输出的扭矩。
2. 扭矩向量控制方法扭矩向量控制方法是电子差速复合控制方法的一种重要扩展。
该方法通过给每个轮子分配不同大小和方向的扭矩,实现灵活的差速控制。
通过精确分配扭矩,可以使车辆在不同路况下获得最佳的牵引力和行驶稳定性。
3. 动态差速控制方法动态差速控制方法可以根据车辆的实时工况和路况情况,动态调整差速控制策略。
通过对传感器获取的数据进行实时处理,可以根据车辆的状态和驾驶员的需求,调整差速控制参数,从而保证车辆的稳定性和操控性能。
三、应用和前景展望轮毂式电动汽车电子差速复合控制方法的研究在实际应用中具有重要意义。
通过合理选择和设计差速控制策略,可以提高电动汽车的操控性、节能性和安全性。
四轮毂电机电动车的电子差速控制方法作者:杨濛李睿智金家林来源:《科技风》2017年第21期摘要:通常四轮独立驱动的电动汽车电子差速系统都是基于转矩分配进行的,本文提出了一种通过对各轮速进行转速分配的电子差速系统,利用Ackermann-Jeantand转向模型,实时计算电子差速过程中随着转角角度以及车辆速度变化的各个车轮的所需转速,并分析了转向时转向轮之间的转矩分配问题。
在carsim联合matlab仿真中通过多种车辆工况仿真实验验证了所提出的算法的实用性以及可行性,仿真结果表明,整车系统动态性能良好,电子差速控制策略可以满足四轮独立驱动电动汽车的行驶要求。
关键词:电动车;轮毂电机;电子差速;控制方法随着能源短缺的危机和环境污染的日益严重,燃油车正逐渐被新能源汽车替代,电动汽车的出现可以解决上述问题,并且已经得到了广泛的关注,在电动汽车中,对于电机驱动控制系统,大部分电动车采用驱动电机与差速器相连再带动车轮的方式,通过电机驱动机械差速器来使得内外车轮的速度差实现差速。
而独立轮驱动的电动汽车会根据不同的方向转角来分配给内外侧车轮不同的驱动力矩来实现车辆的差速算法,但这种算法并不能减小车辆的转角半径而且车辆的滑移率也不能得到很好的控制。
本文提出了一种电子差速算法。
电子差速即通过车辆在不同转角以及车速的情况下,计算所需要的各轮轮速,然后经过对电机的转速控制,从而实现车辆的差速算法。
1 电子差速方法电子差速的方法是通过驾驶者输入的转角信号和油门信号传入控制器,再由控制器根据当前整车状态值计算出各轮所需转速,然后通过通信等方式分配给各轮控制器,再由各轮控制器根据所给定的轮速对电机做出调速,从而实现车辆的顺利转弯。
1.1 转向原理四輪电子差速需要对4个轮毂电机同时进行速度控制和差速计算,是一个复杂的控制系统。
其中包括方向盘转角传感器、霍尔传感器、电机控制器、4个轮毂电机。
电子差速转向系统根据当前状态实时调整电机转速。
国内图书分类号:U469.72 密级:公开国际图书分类号:629西南交通大学研究生学位论文四轮轮边驱动电动公交车电子差速控制研究年级二O一六级姓名陈晓菲申请学位级别工程硕士专业车辆工程指导老师刘平副教授二零一九年五月Classified Index:U469.72U.D.C:629Southwest Jiaotong UniversityMaster Degree ThesisResearch on Electronic Differential Control of Four-wheel Wheel-drive Electric BusGrade:2016Candidate:Chen XiaofeiAcademic Degree Applied for :MasterSpeciality:Vehicle EngineeringSupervisor:Liu PingMay.30,2019摘要分布式驱动形式汽车是一种新型的电驱动汽车,取消了传统汽车上的发动机、变速器、传动轴、差速器等机械结构,驱动电机直接与车轮或经过减速器后与车轮相连。
这种驱动形式相比较传统汽车具有更高的传递效率,从控制上也具有更高的灵活性。
但在取消了机械差速器的同时需要设计合理的电子差速控制器,本文主要是针对电子差速控制策略在四轮独立轮边驱动电动公交车的应用展开了相关的研究。
本文研究对象为四轮独立轮边驱动电动公交车,以该车为原型进行Trucksim动力学软件建模,并与MA TLAB/simulink联合搭建电动汽车联合仿真模型,其中包括车体、轮胎、悬架KC特性、制动系统和转向系统等子模块的建模。
将搭建的车辆模型进行最小转弯直径、30km/h直线滑行距离、0-30km/h加速时间仿真实验,并与实车试验数据进行对比,验证了模型的准确性。
分析传统机械差速器的工作原理,并以此为依据提出以滑转率作为电子差速评价指标,且电子差速控制目标为使驱动轮滑转率保持在稳定区域。

参考文献:[1] 赵又群,尹浩,张丽霞,等.汽车操纵逆动力学的现状与发展[J].中国机械工程,2005,16(1):77 82.[2] Bernard J,P ickelmann M.An Inv erse L inear M odel of aV ehicle[J].Vehicle System Dynamics,1986,15(4):179 186.[3] Trom J,Vanderploeg M,Bernard J.Application of Inverse M odels to V ehicle O ptimization Problems[J].Vehicle System Dynamics,1990,19(2):97 110.[4] 吴杰,赵又群,吴珂.基于逆问题求解的汽车操纵性能分析[J].中国机械工程,2006,17(4):435 439.[5] Hatwal H,M ikulcik E C.Some Inv erse Solutions to anA utomobile Path-tracking Pr oblem w ith Input Controlof Steering and Brakes[J].V ehicle System Dynamics,1986,15(2):61 71.[6] Sr idhar J,Hatwal H.A Comparative Study o f FourWheel Steering M odels Using the Inverse Solution[J].V ehicle System Dy namics,1992,21(1):1 18.[7] H endrikx J P M,Meijlink T J J,K riens R F C.A pplication o f Optimal Control T heory to Inverse Simulation of Car Handling[J].Vehicle System Dynamics,1996,26(6):449 461.[8] Cossalter V,Da Lio M,Lot R.A General M ethod fo rthe Evaluation of Vehicle M aneuverability with Special Emphasis on Moto rcycles[J].Vehicle System Dynam ics,1999,31(2):113 135.[9] 余志生.汽车理论[M].3版.北京:机械工业出版社,2000.[10] 吴沧浦.最优控制的理论与方法[M].2版.北京:国防工业出版社,2000.[11] 袁亚湘,孙文瑜.最优化理论与方法[M].北京:科学出版社,1997.(编辑 袁兴玲)作者简介:张丽霞,女,1978年生。
电动汽车低速转向电子差速兼顾辅助转向控制以后轮自主驱动的电动汽车转向差速控制为基础,同时结合电动汽车低速转向的特点构建一个阿克曼转向模型,再对车辆转向时电子差速的控制发挥出的辅助作用进行全面考虑,进而实现了对低速转向电子差速兼顾辅助转向控制全面的分析。
最终结果表明了通过阿克曼转向差速仿真模型而制定的转矩分配方案,不但发挥出了差速的作用,并且在车辆的转向行驶过程中也表现出了较为出色的辅助效果。
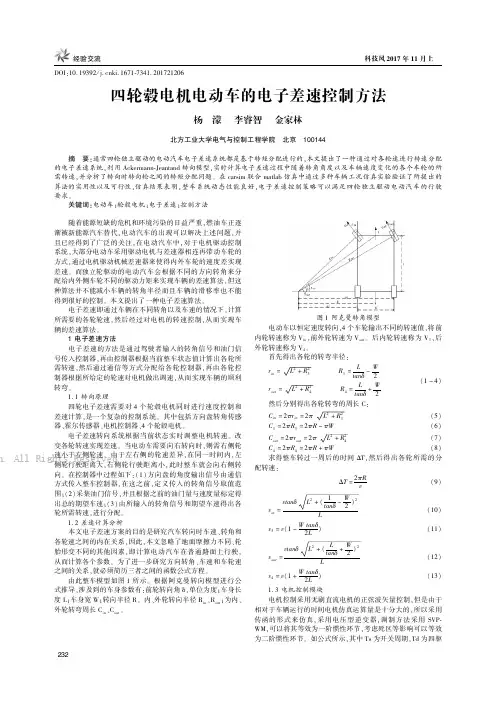
标签:电动汽车;低速转向电子差速;辅助;转向控制一、阿克曼转向模型当车辆转向时,按照阿克曼转向模型,能够得到车辆运动的实际状态,详情见下图1。
在图中,δin与δout是汽车外前轮的转向角度,δ代表的是汽车整体转向的角度,W还有L指的是汽车轴距以及轮距,而R0代表汽车转向半径,Rin以及Rout为汽车内外两侧驱动轮实际的转向半径,车辆行驶速度用v表示,也就是后轮轴线的中点位置以O为中心旋转的速度。
通过上述的阿克曼转向模型,我们可以分析电动汽车各个时刻运动的状态。
对于阿克曼转向模型中的几何关系而言,其中任何一个车轮驶过的路径圆心均汇聚到了汽车后轴延长线转向的中心点上,从而让转向变得更为流畅,同时还可以得到以下公式:R0=L/tanδ(1)r0=L/sinr0(2)Rin=R0-W/2(3)Rout=R0+ W/2(4)二、差速兼顾辅助转向控制1.转矩的分配方案在电动汽车中应用阿克曼转向模型,需要对汽车行驶速度、汽车的动力学模型还有输入转角等参数进行收集,从而得到车轮的转速以及转弯半径等数据,进而计算出车辆内外侧的驱动轮转矩的差值,同时根据驾驶员期待的驱动力橘来做合理化分配,最终让转速差达到转向差速的效果。
下图2即电子差速的控制方案结构示意图。
图2电子差速的控制方案结构示意图为了确保汽车的总驱动力矩处于恒定状态,通过等差值转矩分配法,所以两侧驱动轮分配到的转矩值是:Tin=Td-?T(7)Tout=Td-?T(8)车辆在转向的过程中,其控制系统会收集汽车油门踏板的信号,从而给出特定的总驱动力矩,同时按照方向盘的转角以及车速信号等,最终通过计算来得出汽车内外两侧精准的驱动轮转矩。

武汉理工大学硕士学位论文两后轮驱动的电动汽车的差速控制姓名:马建国申请学位级别:硕士专业:电路与系统指导教师:黄涛20070401摘要电动汽车是当今汽车行业发展的重要分支,它涉及到车辆工程、电机及其驱动技术、控制技术、电池技术等领域的核心技术,其独特的发展前景吸引了国内外大型研究机构的大力推动,成为当前相关领域的研究热点,各项成果也相继被推出。
两轮驱动电动车表征了一种新颖的电动车(ElectricVehicle,简称Ev)发展方向,同步于当今世界电动车研发和产业化的进程,以其理想的控制特性和广泛的应用前景,受到学术和工程界的普遍关注。
本文针对两轮驱动电动车的DSP控制系统进行了相关的研究、分析、设计和实验。
本文首先对国内外电动汽车的发展背景进行了很详细的分析,着重介绍了国内外政府及汽车公司在电动汽车研究和推广上所做的努力。
介绍了驱动系统的分类及比较。
其次,无刷直流电机是电动汽车的核心部件,本文就无刷直流电机分析了它的运行原理,对其中涉及到的大量设计问题都进行了详细的分析,如不同位置传感器的工作原理,不同绕组的不同全控电路,各种针对无刷直流电机的控制方式特别是微机控制方式,电机转速的测量,以及轮毂电机的驱动。
再次,于传统的电子差速算法上,本课题以简单新颖的轮式驱动电动汽车的工程项目为背景,立足于其动力系统性能的优化设计与控制,深入地研究了整车先进车辆差速控制的控制策略,提出了基于TI.DSP2404A的轮式驱动电动车辆驱动的设计思路,并围绕此思路,设计了硬件电路。
最后,本文还涉及了开关电源方面的研究,并设计了针对本系统的开关电源系统,以保证系统各芯片及控制功率器件能正常稳定的工作,在全文最后分析了得到了根据输入参数实测的波形,验证了电动汽车PWM差速控制方案的可行性。
关键词:电动汽车,差速控制,PWM,轮毂直流无刷电机1.2目前电动汽车发展的概况(1)电动汽车驱动方式及轮式驱动研究现状传统的燃油汽车的驱动系统包含发动机、减速器和差速器。
如匍緒MW g Academic papers|化工工程与制造收稿日期:2020-06-02作者简介:田宇(1986-)女,汉族,陕西宜君人,硕士,讲师,研究方向:物理学,机电教学。
基于SIMULINK的轮毂电机电子差速旋转控制系统设计仿真田宇(铜川职业技术学院,铜川727031)摘要:基于轮毂电机驱动电动汽车可单独控制驱动轮,所以在保障灵活性时,进一步提高了电机电子控制要求。
据此文章基于SIMULINK设计了轮毂电机电子差速旋转控制系统,以特殊试验工况检验了控制系统具体效果,即以Madab软件设计构建Simulink仿真模型,以此针对仿真结果与系统实际控制效果做了对比。
得出结论,电子差速旋转控制系统可快速有效辨别路面状况与行驶工况,在直线行驶于对接路面状态是,系统可控制两驱动车轮滑转率于理想范围,从而切实发挥汽车驱动力;系统可实现汽车转向时两驱动轮差速控制,两轮毂电机转速与转向模型的转速要求相符,误差可控制于要求标准内。
关键词:SIMULINK;轮毂电机;电子差速旋转控制中图分类号:U469.72文献标识码:A文章编号:1001-5922(2021)02-0142-04 Design Simulation of Electronic Differential Rotating Control System for Hub Motor Based on SIMULINKTian Yu(Tongchuan Vocational and Technical College,Tongchuan727031,China)Abstract:Based on the hub motor drive electric vehicle can control the drive wheel separately,so in the guarantee of flexibility,further improve the motor electronic control requirements.Based on SIMULINK,this paper designed the electronic differential rotation control system of hub motor,tested the effectiveness of the electronic differential rotation control system under special test conditions,and built the SIMULINK simulation model based on Madab to compare the simulation results with the actual results.The results show that the electronic differential rotation control system can distinguish the road condition and driving condition quickly and effectively.In the state of straight driving on the docking road,the system can control the slip rate of the two-drive vehicle within the ideal range,so as to effectively exert the driving force of the vehicle.The system can realize the differential control of two driving wheels in automobile steering,the speed of the two hub motors is consistent with the speed requirements of the steering model,and the error can be controlled within the required standard.Keywords:SIMULINK;wheel hub motor;electronic diflerential rotation control0引言在车辆直线运行状态下,车轮没有出现打滑现象时,左侧与右侧轮胎转矩相等。
动力电池的电动汽车驱动系统仿真与优化设计随着电动汽车市场的快速发展,动力电池的性能和稳定性对电动汽车的性能和续航里程至关重要。
为了实现高效、可靠、安全的电动汽车驱动系统,仿真与优化设计成为一项重要的工作。
本文将从仿真工具的选择、关键参数的优化以及系统设计的优化三个方面进行论述。
一、仿真工具的选择在动力电池的电动汽车驱动系统仿真与优化设计中,首先需要选择合适的仿真工具。
目前,常用的仿真工具有MATLAB/Simulink、LabVIEW、AMESim等。
这些工具具有模块化、可视化的特点,适用于复杂系统的建模和仿真。
二、关键参数的优化为了实现电动汽车驱动系统的优化设计,需要优化关键参数,提升整个系统的性能。
关键参数包括动力电池的容量、电池充放电性能、电机的效率以及控制策略等。
通过建立数学模型,利用仿真工具对这些参数进行优化,可以提高电动汽车的续航里程、加速性能、能量利用率等关键指标。
三、系统设计的优化在动力电池的电动汽车驱动系统设计中,需要考虑动力电池与电机、控制系统之间的匹配和协调。
一方面,电机的选型和控制策略需要与动力电池的特性相匹配,以充分发挥电机的性能。
另一方面,电动汽车的整车控制系统也需要与电池、电机相协调,确保驱动系统的稳定性和安全性。
通过仿真与优化设计,可以找到最佳的匹配方案,提升整个系统的效能。
综上所述,动力电池的电动汽车驱动系统仿真与优化设计是电动汽车技术发展的关键环节。
选择合适的仿真工具、优化关键参数和系统设计的协调配合,可以实现电动汽车驱动系统的性能提升和能耗优化。
通过不断改进与优化,电动汽车的发展前景将更加广阔。
电动汽车电子差速控制策略研究作者:陈阁李翔翼赵地来源:《时代汽车》2022年第06期摘要:轮毂电机相较于传统电机,具有响应速度快、能量转化率高等优点。
为了保证电动汽车的安全性,使用轮毂电机驱动的汽车去掉了变速器等机械结构。
本文使用仿真MATLAB软件建立动力学模型来进行汽车的差速研究。
并且使用CARSIM软件进行汽车参数的建模,使得到的实验结果尽可能准确。
然后使用PID调节器控制电流,其中采用电磁力矩方程和电压方程。
车辆动力学模型分两步建立,电动车相关参数输入软件进行建模。
采用电子差速控制和直接橫摆控制两种控制方式。
仿真和试验结果表明,这两种控制方式在低速下具有较好的控制效果。
关键词:轮毂电机 MATLAB 建模1 引言随着汽车工业的发展,燃油汽车不仅给人们带来了舒适的体验,但同时也带来了许多环境问题,在这个大背景下,电动汽车被研究出来。
在机械结构变化的基础上,必须保证电子差速器系统的安全性和可靠性,这是电动汽车安全的前提。
考虑到车辆扭矩中心偏差对车轮载荷垂直传递的影响,分析了牵引质量驱动力和车身偏差对车轮载荷垂直传递的影响。
利用CARSIM软件建立动态模型,利用SIMULINK软件确定控制策略,最后对系统进行总体仿真。
传统的阿克曼建模仿真有很多学者进行相关的探索。
但是这个模型局限性很大,它只能在线性时不变的系统模型中应用。
如果要探究速度快的车辆模型,就需要再针对其他干扰因素作出更深一步的研究。
2 电动汽车电子差速控制策略研究2.1 电动汽车转向动力学模型2.1.1 多自由度汽车动力学模型车辆的动态转向性能是指车辆在驾驶员对方向盘进行输入的情况下的响应,评价标准是车辆是否能够根据驾驶员的意图,在方向盘角度输入下,通过一系列转向机构改变方向盘角度,本文研究的电动问题与车辆的行驶稳定性有关,下面就可以对汽车的七自由度模型进行建立。
如图1所示。
在建模时,本文采用了MATLAB中的simulink和CARSIM这两个建模仿真软件。
4WID-EV的自动差速原理及控制策略1. 什么是自动差速?自动差速是指在车辆行驶时,通过车载电脑系统对车辆各轮的转速进行检测和比较,确定车辆行驶状态下各轮的转速差异,并根据运动学原理和轮胎摩擦力的特性,控制差速锁或电子差速器,在车辆行驶时自动进行差速控制。
2. 自动差速的原理一般来说,车辆行驶时车轮的转速不可能完全相等,因为各轮的部件和力的作用方式都不同,因此车轮之间的差异就产生了。
如果车辆行驶时车轮之间的差异较大,就会出现侧滑、散旋、偏移等情况,甚至产生危险。
自动差速原理就是基于“左右轮之间的差异越小,车辆行驶越稳定”的运动学原理。
在差速控制中,车载电脑检测车轮的转速,如果某一侧的车轮转速低于另一侧车轮,则会通过控制差速器将动力更多地分配给低速车轮,使车辆更好地向前推进。
3. 自动差速的控制策略自动差速的控制策略可以分为两种:机械差速和电子差速。
机械差速是一种传统的差速技术,包括差速锁和限滑差速器。
通过差速锁锁定轴的左右两轮轮轴,使动力通过左右两轮轮轴传递,保持左右轮的转速一致;限滑差速器则采用液压或机械结构控制驱动轮转速差,从而防止车轮打滑。
而电子差速则将变速器和差速器直接相连,并通过车载电脑控制车轮的转速,从而实现对轮胎摩擦力的精确控制。
通过车载电脑对车辆行驶状态的实时检测和分析,可以更加准确地控制车轮的行进速度和力的分配,从而提升车辆行驶时的稳定性和安全性。
综上所述,自动差速作为现代汽车技术的重要组成部分,凭借着其先进的控制策略和优秀的性能,在提升车辆行驶稳定性和安全性方面起着至关重要的作用。
随着科技的不断发展和创新,相信在不久的将来,自动差速技术将不断得到改进和完善,成为汽车领域的一项重要突破。
4. 自动差速的应用场景自动差速技术广泛应用于越野车、SUV、卡车等重载车辆以及赛车等高性能车型中。
在越野行驶中,能够有效提升车辆通过性;在高速行驶中,能够保证车辆稳定性和安全性;在赛车比赛中,能够帮助选手更好地控制赛车。