纯电动汽车控制策略共25页
- 格式:ppt
- 大小:4.82 MB
- 文档页数:25
纯电动汽车电机系统的控制策略纯电动汽车的电机系统控制策略是多样的,旨在实现高效的动力输出、维持电池状态和最大程度延长续航里程。
以下是一些常见的电动汽车电机系统控制策略:1.电机功率调节:控制电机的功率输出,以满足车辆的加速、维持恒速行驶和超车等需求。
电机功率通常是通过调整电机控制器中的电流和电压来实现的。
2.能量回收:电动汽车通常具有再生制动系统,能够将制动时产生的能量转化为电能,并存储在电池中。
控制策略会根据车辆速度和制动力度来调整能量回收的程度。
3.驱动模式选择:提供不同的驾驶模式,如经济模式、标准模式和运动模式。
每种模式会根据驾驶者的选择来调整电机的性能和续航里程。
4.动力分配:在多电机系统中,控制策略会决定不同电机之间的动力分配,以实现最佳的牵引力、悬挂控制和稳定性。
5.温度管理:控制电机和电池的温度,以维持在合适的操作范围内,以确保性能和寿命。
6.电池管理系统:监测和管理电池的状态,包括电池充电和放电速度,以避免过充或过放,从而延长电池寿命。
7.最佳速度控制:通过计算车辆和驾驶条件,选择最佳速度来提高能效和续航里程。
8.动力输出平滑性:通过调整电机的输出来确保加速和减速平稳,提高驾驶舒适性。
9.车辆动力分布:在具有多个电机的车辆中,控制策略可以根据驾驶条件和车辆稳定性来分配动力到前轮或后轮,或分配到单个轮胎以提高牵引力。
10.充电管理:控制充电速度、充电房间以及使用电网能源的时间,以满足用户需求和电力系统的可持续性。
这些策略通常是由电动汽车的控制单元(ECU)来执行,通过传感器和反馈系统来实时监测车辆状态和驾驶条件。
这些策略的目标是提高电动汽车的性能、效率和可持续性,同时确保驾驶安全性和舒适性。
电动汽车控制策略与优化随着环保意识的不断提升和技术的不断发展,电动汽车逐渐走进人们的视野。
然而,由于电动汽车的能量存储和供给方式与传统汽车有很大差异,有效的电动汽车控制策略与优化对于其性能和经济性的提升至关重要。
电动汽车的特点电动汽车与传统汽车最大的区别在于动力系统。
传统汽车引擎通过化石燃料的燃烧产生动力,而电动汽车则利用电动机将电能转换成机械能。
由于其能量存储和供给方式的不同,电动汽车的特点主要表现在以下几个方面:1. 电池容量有限电动汽车的能量存储主要依靠电池,而电池容量是有限的。
由于电池的充电与放电效率较低,其可用能量更少。
因此,电量的合理利用对于电动汽车的性能和经济性至关重要。
2. 运行性能稳定电动汽车和传统汽车相比,所处的工作环境更为复杂变化,包括工况、充电电网负荷等方面的变化。
因此,为了保证其运行性能的稳定,电动汽车需要合理的控制和优化策略。
3. 可调节性较高由于电动汽车的动力系统可以很好地进行电流调节和转矩控制,因此其在车速、功率等方面可调节性相对传统汽车较高。
因此,电动汽车需要针对这种特点,进行动力控制和调节。
电动汽车控制策略针对电动汽车的特点,一个好的控制策略能够使得电动汽车获得更好的性能和经济性。
以下是一些常见的电动汽车控制策略:1. 能量管理控制策略能量管理是电动汽车控制的重要环节。
其主要作用是合理安排电池的使用与充电,以保证电动汽车的运行稳定和经济性。
典型的能量管理控制策略包括:协调电池和发动机的联合功率管理,最大化电池可用能量的提取和储存,以及优化发动机转速控制等。
2. 动力控制策略动力控制策略主要针对电动汽车的电动机进行控制。
该控制策略主要包括电动机的转速和转矩调节。
电动汽车的转速和转矩对于它的动力性、舒适性和能量利用效率有着重要的影响。
因此,动力控制策略对于电动汽车的性能和经济性至关重要。
3. 制动能量回收策略电动汽车在制动时会产生惯性能量,如果能够合理地利用这一能量,就能降低电动汽车的能量消耗和碳排放。
纯电动汽车电机驱动系统控制策略研究一、本文概述随着全球对环境保护和可持续发展的日益关注,纯电动汽车作为一种绿色、环保的交通工具,其研究和应用逐渐受到广泛重视。
作为纯电动汽车的核心部件,电机驱动系统的控制策略直接影响着车辆的动力性能、经济性以及运行稳定性。
因此,对纯电动汽车电机驱动系统控制策略的研究具有重要的现实意义和理论价值。
本文旨在深入探讨纯电动汽车电机驱动系统的控制策略,分析不同控制策略的原理、特点以及适用场景。
通过对现有研究成果的梳理和评价,发现控制策略在提升纯电动汽车性能方面的潜力与不足。
在此基础上,结合实际应用需求,提出一种优化后的电机驱动系统控制策略,并通过仿真和实验验证其有效性和优越性。
本文的研究内容主要包括以下几个方面:对纯电动汽车电机驱动系统的基本组成和工作原理进行介绍,为后续控制策略的研究奠定基础;详细分析几种典型的电机驱动系统控制策略,如PID控制、模糊控制、神经网络控制等,并比较它们的优缺点;接着,针对纯电动汽车在实际运行中面临的问题,如启动加速性能、能量利用效率、行驶稳定性等,提出相应的优化措施和改进方案;通过仿真实验和实际道路测试,验证优化后控制策略的有效性和可行性。
本文的研究成果将为纯电动汽车电机驱动系统控制策略的优化提供理论依据和技术支持,对于推动纯电动汽车技术的发展和应用具有重要的促进作用。
本文的研究方法和思路也可为其他类型电动汽车的控制策略研究提供参考和借鉴。
二、纯电动汽车电机驱动系统概述纯电动汽车作为新能源汽车的一种,其核心在于电机驱动系统,该系统负责将存储在电池中的电能转化为机械能,从而驱动汽车行驶。
电机驱动系统主要由电机、控制器和传动装置三部分组成。
电机是纯电动汽车动力系统的核心部件,其性能直接影响到汽车的动力性、经济性和舒适性。
目前,纯电动汽车常用的电机主要有直流电机、交流异步电机、交流同步电机和开关磁阻电机等。
这些电机各有优缺点,例如直流电机控制简单,但效率低、维护成本高;交流异步电机结构简单,可靠性高,但控制复杂;交流同步电机效率高,但成本较高;开关磁阻电机调速性能好,但噪音和振动较大。

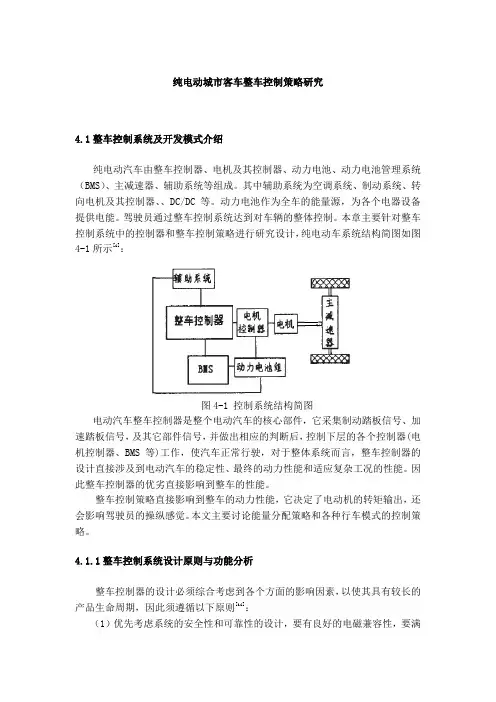
纯电动城市客车整车控制策略研究4.1整车控制系统及开发模式介绍纯电动汽车由整车控制器、电机及其控制器、动力电池、动力电池管理系统(BMS)、主减速器、辅助系统等组成。
其中辅助系统为空调系统、制动系统、转向电机及其控制器、、DC/DC等。
动力电池作为全车的能量源,为各个电器设备提供电能。
驾驶员通过整车控制系统达到对车辆的整体控制。
本章主要针对整车控制系统中的控制器和整车控制策略进行研究设计,纯电动车系统结构简图如图4-1所示[i]:图4-1 控制系统结构简图电动汽车整车控制器是整个电动汽车的核心部件,它采集制动踏板信号、加速踏板信号,及其它部件信号,并做出相应的判断后,控制下层的各个控制器(电机控制器、BMS等)工作,使汽车正常行驶,对于整体系统而言,整车控制器的设计直接涉及到电动汽车的稳定性、最终的动力性能和适应复杂工况的性能。
因此整车控制器的优劣直接影响到整车的性能。
整车控制策略直接影响到整车的动力性能,它决定了电动机的转矩输出,还会影响驾驶员的操纵感觉。
本文主要讨论能量分配策略和各种行车模式的控制策略。
4.1.1整车控制系统设计原则与功能分析整车控制器的设计必须综合考虑到各个方面的影响因素,以使其具有较长的产品生命周期,因此须遵循以下原则[ii]:(1)优先考虑系统的安全性和可靠性的设计,要有良好的电磁兼容性,要满足国家相关标准,能适应任何路况下的车辆振动和冲击;在纯电动汽车中,由于是大功率电机驱动,相当于是一个强干扰源,会对整车控制器产生很强的电磁干扰,因此这就要求整车控制器要有较强的抗干扰能力;(2)整车控制器能够在环境温度为-40℃至100℃的范围内可靠稳定地工作。
因为汽车使用环境恶劣,相对应的对车用电子设备也提出更高的要求;(3)综合分析功能需求,在功能验证和样车开发试制时尽可能多地采取软件实现,以增加系统变更时的灵活性,设计定型后综合考虑系统的可靠性和成本,设计软硬件;(4)硬件设计中,外围接口资源要冗余设计,以提供变更时的适应性;(5)控制策略与控制逻辑设计中,对异常状态尽可能多地采用报警提示、减少强制停机处理,特别要避免行车时的强制停车;(6)根据电池管理系统送出的故障信息及时调整电机驱动指令;在保证行车安全的前提下,避免电池受到损坏。
新能源纯电动汽车整车上下电控制策略设计介绍一、前言为了提高整车高压上下电安全,准确诊断出整车动力系统的高压故障并迅速做出相应处理,本文针对纯电动汽车动力系统结构,定义了基于CAN通讯的整车控制网络。
以整车安全性为主要参考量,设计了电动汽车整车控制器上电控制策略、下电控制策略以及紧急故障模式下对高压电紧急下电和低压电处理方法,为调试整车控制器及相应的高低压设备奠定基础。
电动汽车展示二、高压控制的重要性纯电动汽车(EV)以动力蓄电池组作为唯一动力源,以驱动电机作为唯一动力驱动装置。
蓄电池工作电压高达几百伏,当发生高压电路绝缘失效或短路等故障时,会直接影响驾乘人员的生命财产以及车载用电器的安全。
因此,在设计和规划高压动力系统时应充分考虑整车和人员的电气安全性,确保车辆运行安全、驾驶人员安全和车辆运行环境安全。
整车控制器(VCU)是纯电动汽车运行的核心单元,担负着整车驱动控制、能量管理、安全保障、故障诊断和信息处理等功能,是实现纯电动汽车安全高效运行的必要保障。
纯电动汽车上下电控制策略开发设计的目的在于:在已有整车动力系统结构的前提下,通过采集钥匙及踏板等驾驶员动作信号,并通过CAN总线、电池管理系统(BMS)及电机控制器(MCU)等子系统进行通讯,来控制整车高压上电、下电安全。
同时在上下电过程中,力求准确诊断出整车动力系统的高压故障并迅速做出相应处理。
目标车型钥匙门开关设置为两挡:OFF挡、ON挡;整车挡位设置为:前进挡(D挡)、空挡(N挡)、倒挡(R挡)。
表1为各主要部件缩略语及其定义。
表2为各变量名称及说明。
表1主要部件缩略语及其定义表2各变量名称及说明三、整车上下电控制策略1、整车模式说明基于钥匙门位置设置,进行上下电控制,实现整车控制系统初始化、自检、充电状态判断等功能。
目标车型整车控制器由低压蓄电池供电,其上电下电状态由仪表板上的低压开关进行控制。
整车模式分为外接充电模式、非充电模式和紧急停机模式。
学习任务3 纯电动汽车的控制策略任务目标任务目标能够正确的认识纯电动汽车的控制策略的功用和设计思路。
能够掌握对加速转矩控制策略、制动能回馈控制策略、驱动转矩的功率限制策略的分析方法学习重点对纯电动汽车控制策略的分析和设计。
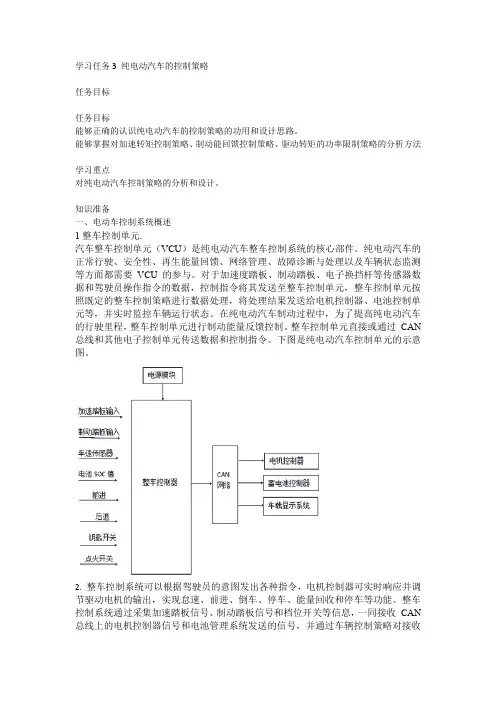
知识准备一、电动车控制系统概述1整车控制单元.汽车整车控制单元(VCU)是纯电动汽车整车控制系统的核心部件。
纯电动汽车的正常行驶、安全性、再生能量回馈、网络管理、故障诊断与处理以及车辆状态监测等方面都需要VCU 的参与。
对于加速度踏板、制动踏板、电子换挡杆等传感器数据和驾驶员操作指令的数据,控制指令将其发送至整车控制单元,整车控制单元按照既定的整车控制策略进行数据处理,将处理结果发送给电机控制器、电池控制单元等,并实时监控车辆运行状态。
在纯电动汽车制动过程中,为了提高纯电动汽车的行驶里程,整车控制单元进行制动能量反馈控制。
整车控制单元直接或通过CAN 总线和其他电子控制单元传送数据和控制指令。
下图是纯电动汽车控制单元的示意图。
2.整车控制系统可以根据驾驶员的意图发出各种指令,电机控制器可实时响应并调节驱动电机的输出,实现怠速、前进、倒车、停车、能量回收和停车等功能。
整车控制系统通过采集加速踏板信号、制动踏板信号和档位开关等信息,一同接收CAN 总线上的电机控制器信号和电池管理系统发送的信号,并通过车辆控制策略对接收到的数据信息进行分析判断,获取驾驶员的驾驶意图和车辆行驶状态,最后利用CAN 总线发出指令,控制各部件控制器的工作,从而保证车辆正常行驶3、整车控制策略的功用纯电动汽车驱动系统中主要有电机驱动装置,传动系统,动力电池等。
必须有一个性能优越、安全可靠的整车控制策略,从各个环节上合理控制车辆的运行状态、能源分配和协调功能,以充分协调和发挥各部分的优势,使汽车整体获得最佳运行状态。
整车控制策略主要包括:(一) 汽车驱动控制。
根据司机的驾驶要求、车辆状态、道路及环境状况,经分析和处理,向电机控制器发出相应指令,满足驾驶要求。

10.16638/ki.1671-7988.2021.04.001纯电动汽车加速过程的转矩优化控制策略马晓楠1,吉春宇2,韦尚军2,覃记荣2,郑伟光1,2(1.桂林电子科技大学机电工程学院,广西桂林541004;2.东风柳州汽车有限公司,广西柳州545005)摘要:针对纯电动汽车在加速过程中电机输出转矩不能准确表达驾驶员驾驶意图的问题,提出了基于模糊控制的转矩优化控制策略。
为了准确识别驾驶员在加速过程中的驾驶意图,建立了以车速偏差和加速踏板开度变化率为输入变量,驾驶意图系数为输出变量的模糊控制器,对驾驶员的加速意图进行识别,并将汽车的加速模式设计为动力模式、一般模式和经济模式3种模式。
动力模式采用硬踏板曲线控制,同时为提高车辆在低速和急加速时的加速性能,增加了基于模糊控制的补偿转矩;一般模式采用线性踏板曲线控制,作为动力模式与经济模式切换的过渡;经济模式采用软踏板曲线控制,提高车辆加速时的经济性。
仿真结果表明:与传统的线性控制策略相比,所研究的转矩优化控制策略能够准确识别驾驶员的驾驶意图,汽车的动力性和经济性都得到了改善。
关键词:纯电动汽车;驾驶意图;模糊控制;转矩优化;补偿转矩中图分类号:U469.72 文献标识码:A 文章编号:1671-7988(2021)04-01-06Torque Optimization Control Strategy for Acceleration Processof Pure Electric VehicleMa Xiaonan1, Ji Chunyu2, Wei Shangjun2, Qin Jirong2, Zheng Weiguang1,2 ( 1.School of mechanical and electrical engineering, Guilin University of Electronic Technology, Guangxi Guilin 541004;2.Dongfeng Liuzhou Motor Co., Ltd, Guangxi Liuzhou 545005 )Abstract: Aiming at the problem that the motor output torque of pure electric vehicle cannot accurately express the driver's driving intention during acceleration, a torque optimization control strategy based on fuzzy control is proposed. In order to accurately identify the driver's driving intention in the process of acceleration, a fuzzy controller with the vehicle speed deviation and the change rate of accelerator pedal opening as the input variable and the driving intention coefficient as the output variable is established to identify the driver's acceleration intention, and the acceleration mode of the car is designed as three modes: power mode, general mode and economic mode. The power mode adopts hard pedal curve control, and in order to improve the acceleration performance of the vehicle at low speed and rapid acceleration, the compensation torque based on fuzzy control is increased; the general mode adopts linear pedal curve control as the transition between power mode and economic mode; the economic mode adopts soft pedal curve control to improve the economy of the vehicle during acceleration. The simulation results show that, compared with the traditional linear control strategy, the torque optimization control strategy can accurately identify the driver's driving intention, and the vehicle's power and economy are improved.Keywords: Pure electric vehicle; Driving intention; Fuzzy control; Torque optimization; Compensation torqueCLC NO.: U469.72 Document Code: A Article ID: 1671-7988(2021)04-01-06作者简介:马晓楠(1996-),山东临沂人,在读硕士研究生,就读于桂林电子科技大学机电工程学院,主要研究方向:纯电动汽车驱动控制研究。
纯电动汽车驱动控制策略研究针对纯电动汽车运行环境复杂多变、难以预测,驾驶员驾驶意图随意性强的特点,本文采用车速电流双闭环调速系统控制纯电动汽车的车速,其中采用模糊自适应整定 PID 控制策略对车速进行控制,采用 Bang-Bang 控制策略对电流进行控制。
在 Matlab / Simulink 环境下建立了纯电动汽车车速电流双闭环调速系统仿真模型,基于该模型对电动汽车匀速行驶运行工况和爬坡行驶运行工况进行仿真研究,比较 PID 控制策略和模糊自适应整定 PID 控制策略系统的动态特性。
仿真结果表明: 采用基于模糊 PID 控制策略的车速电流双闭环调速系统能够在驱动过程中实现车速无静差和阻抗行驶阻力突变,使得控制系统具有良好的动、静态特性。
纯电动汽车具有低噪声、无污染、能量来源多样化、能量利用率高等优点,是解决能源短缺、环境污染和气候变暖等资源环境问题的重要途径[1-3]。
驱动控制系统是电动汽车的核心部件,控制策略是驱动控制系统的灵魂,其性能的好坏直接关系着电动汽车整车性能和传输效率。
为了使电动汽车达到理想的性能,采用优良的控制方法可以大大改善驱动电机的性能,弥补电机设计的不足。
目前,国内外学者对其进行深入研究,将传统 PID 控制,闭环调速控制、变结构和鲁棒控制等方法移植到电动汽车的驱动系统中,并取得了良好的效果。
纯电动汽车驱动控制系统应具有精确控制车速、阻抗行驶阻力突变和适应不同驾驶习惯的作用,针对这一特点本文采用车速电流双闭环调速系统控制车速[4]。
考虑到纯电动汽车运行状况复杂、控制精度要求高、难以建立精确的数学模型等特点,因此采用模糊自适应整定 PID 控制策略对车速进行控制,采用 Bang-Bang 控制策略对电流进行调节。
1 纯电动汽车驱动控制系统建模在纯电动汽车驱动控制系统中,根据被控对象的不同,可以把控制方式分为: 车速单闭环控制和车速电流双闭环控制。
采用车速单闭环控制方式,可以在保证驱动系统稳定的前提下实现车速无静差,但是难以满足快速起步、急加速、行驶阻力突变等复杂道路情况。
新能源汽车控制策略汽车与交通工程学院 交通运输081 阎俊儒081202004新能源汽车在全球刚刚起步。
代表着汽车产业未来的发展方向。
当前,各国在新能源汽车领域研发的重点是:混合动力汽车。
通过对纯电动汽车和燃料电池汽车的认识,我们能清晰地看到当前各种新能源汽车的基本情况。
新能源汽车虽然拥有广阔的市场前景,但其大面积推广尚需时日。
从当前的发展情况看,新能源汽车的发展面临着三个急需解决或突破的核心问题。
核心问题之一:关键技术,如电池、电控等技术,其产业化过程还未实现。
核心问题之二:成本过高.包括新能源汽车自身生产成本和用户使用成本。
核心问题之三:国家对整个新能源汽车产业链的政策支持力度和深度。
在经济全球化趋势之下。
新能源汽车作为一个广受各国关注的新兴产业,未来必将面临国际市场的激烈竞争格局。
这就决定了新能源汽车企业的发展不但与其自身形成的竞争优劣势相关。
而且与其所属国家相关产业的优劣势息息相关。
因此,新能源汽车的竞争战略不仅仅涉及技术层面、行业企业层面,更涉及到国家产业层面。
为了打造低碳经济发展模式。
美国、日本、法国、德国等发达国家纷纷制定了新能源汽车产业发展政策。
在企业研发、生产、销售和使用等各个环节都给予政策支持。
用以扶持本国新能源汽车产业的发展。
与传统汽车相比。
新能源汽车为我国汽车业缩短与世界汽车业的差距带来了难得的历史发展机遇。
在传统汽车行业里,我国落后于世界领先水平几十年。
而在新能源汽车发展方面,我国在关键技术、研发、资金和政策等产业发展平台上与发达国家几乎处于同一起跑线。
在新能源汽车技术发展初期,国务院就鼓励发展清洁汽车。
面对历史机遇,我们要创造竞争优势。
提升我国在新能源汽车领域的话语权。
依据迈克尔·波特的国家竞争优势理论:国家是企业最基本的竞争优势。
国家扶持新能源汽车的产业政策与发展策略的核心是建立国家竞争优势。
我们要发挥社会主义的优越性,集中力量办大事。
(1)国家抓新能源汽车的基础技术的研究、开发;企业负责应用技术的研究、开发。