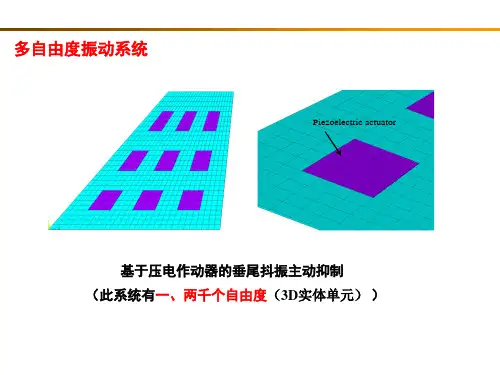
机械振动5多自由度振动7矩阵迭代法
- 格式:pptx
- 大小:560.60 KB
- 文档页数:27
公元前1000多年,中国商代铜铙已有十二音律中的九律,并有五度谐和音程的概念。
在战国时期,《庄子•徐无鬼》中就记载了同频率共振现象。
人们对与振动相关问题的研究起源于公元前6世纪毕达哥拉斯(Pythagoras)的工作,他通过试验观测得到弦线振动发出的声音与弦线的长度、直径和力的关系。
意大利天文学家、力学家、哲学家伽利略(Galileo Galilei) 经过实验观察和数学推算,于 1 5 8 2年得到了单摆等时性定律。
荷兰数学家、天文学家、物理学家惠更斯(c . Huygens)于1 6 7 3 年著《关于钟摆的运动》提出单摆大幅度摆动时并不具有等时性这一非线性现象,并研究了一种周期与振幅无关的等时摆。
法国自然哲学家和科学家梅森(M. Mersenne)于1623年建立了弦振动的频率公式,梅森还比伽利略早一年发现单摆频率与摆长平方成反比的关系。
英国物理学家胡克(R. Hooke)于1 6 7 8 年发表的弹性定律和英国伟大的物理学家、数学家、天文学家牛顿(I. Newton)于1 6 8 7年发表的运动定律为振动力学的发展奠定了基础。
在下面对振动发展史的简述中,主要是针对线性振动、非线性振动、随机振动以及振动信号采集和处理这三个方面进行的。
而关于线性振动和非线性振动发展史的简介中,又分为理论研究和近似分析方法两个方面。
线性振动理论在18世纪迅速发展并趋于成熟。
瑞士数学家、力学家欧拉(L. Euler)于1728年建立并求解了单摆在有阻尼介质中运动的微分方程; 1 7 3 9 年研究了无阻尼简谐受迫振动,并从理论上解释了共振现象; 1 7 4 7 年对九个等质量质点由等刚度弹簧连接的系统列出微分方程组并求出精确解,从而发现线性系统的振动是各阶简谐振动的叠加。
法国数学家、力学家拉格朗日J丄.Lagrange)于1 76 2年建立了离散系统振动的一般理论。
最早被研究的连续系统是弦线,法国数学家、力学家、哲学家达朗伯J. le R. d, Alembert)于1 7 4 6 年发表的《弦振系统是弦线,法国数学家、力学家、哲学家达朗伯(J . 1e R. d, Alem bert)于1 7 4 6年发表的《弦振动研究》将他发展的偏微分方程用于弦振动研究,得到了弦的波动方程并求出行波解。
第4章 多自由度系统振动分析的数值计算方法用振型叠加法确定多自由度系统的振动响应时,必须先求得系统的固有频率和主振型。
当振动系统的自由度数较大时,这种由代数方程求解系统固有特性的计算工作量很大,必须利用计算机来完成。
在工程中,经常采用一些简单的近似方法计算系统的固有频率及主振型,或将自由度数较大的复杂结构振动问题简化为较少阶数的振动问题求解,以得到实际振动问题的近似分析结果。
本章将介绍工程上常用的几种近似解法,适当地选用、掌握这类实用方法,无论对设计研究或一般工程应用都将是十分有益的。
§4.1 瑞利能量法瑞利(Rayleigh )能量法又称瑞利法,是估算多自由系统振动基频的一种近似方法。
该方法的特点是:①需要假定一个比较合理的主振型;②基频的估算结果总是大于实际值。
由于要假设主振型,因此,该方法的精度取决于所假设振型的精度。
§4.1.1 第一瑞利商设一个n 自由度振动系统,其质量矩阵为[]M 、刚度矩阵为[]K 。
多自由度系统的动能和势能一般表达式为{}[]{}{}[]{}/2/2TTT x M x U x K x ⎫=⎪⎬=⎪⎭&& (4.1.1)当系统作某一阶主振动时,设其解为{}{}(){}{}()sin cos x A t x A t ωαωωα=+⎫⎪⎬=+⎪⎭&(4.1.2)将上式代入式(4.1.1),则系统在作主振动时其动能最大值max T 和势能最大值max U 分别为{}[]{}{}[]{}2max max /2/2TTT A M A U A K A ω⎫=⎪⎬=⎪⎭(4.1.3)根据机械能守恒定律,max max T U =,即可求得{}[]{}{}[]{}()2I TTA K A R A A M A ω== (4.1.4)其中,()I R A 称为第一瑞利商。
当假设的位移幅值列向量{}A 取为系统的各阶主振型{}i A 时,第一瑞利商就给出各阶固有频率i ω的平方值,即{}[]{}{}[]{}2(1,2,,)Ti i i Ti i A K A i n A M A ω==L(4.1.5)在应用上式时,我们并不知道系统的各阶主振型{}i A ,只能以假设的振型{}A 代入式(4.1.4),从而求出的相应固有频率i ω的估计值。
《机械振动》教学大纲一、课程基本信息二、课程目的和任务《机械振动》是理论与应用力学等力学类本科专业必修的专业课程,同时也是机械、土建等工程学科本科和研究生培养的一门专业基础课程。
《机械振动》是一门系统地研究自然界和工程技术领域中振动现象的产生机理、运动规律、描述和控制方法的科学。
本课程教学应立足于加强学生的振动力学基础理论素养和相关基本技能培养,并着眼于拓宽学生的相关工程背景,提高科学建模能力,为今后学生能够创造性的从事相关理论研究或工程技术实践奠定必要的基础。
三、本课程与其它课程的关系本课程学习所需的主要选修课程为微分方程、矩阵理论、概率与统计、理论力学、材料力学等一系列数学、力学基础课程。
本课程教学应紧密结合相关的实验力学教学共同完成。
通过本课程的学习,为学生完成相关毕业设计课题奠定必备的基础。
四、教学内容、重点、教学进度、学时分配第一章绪论(2学时)1、主要内容机械振动的概念、振动理论研究体系、振动系统分类、简谐振动以及振动发展历史概述(选)2、本章重点机械振动的概念,振动理论研究体系,简谐振动3、本章难点振动系统分类4、教学要求从工程实践方面介绍广泛存在的振动现象,概括其特点和共同性,由此给出机械振动的科学概念。
指出振动理论的研究体系,分类的方法及振动力学的发展历史与现状,特别是指出振动力学在工程中的应用前景和应用价值;介绍相关参考书,提示学生在今后的学习中,从全书观点逐步理解分类的系统性。
第二章单自由度系统的自由振动(10学时)1、主要内容单自由度系统的无阻尼自由振动、等效质量与等效刚度、等效黏性阻尼和有阻尼自由振动。
2、本章重点建立振动微分方程、固有频率和振型、阻尼比、幅频和相频曲线与共振。
3、本章难点建立微分方程、固有频率、振幅减缩率和阻尼比。
4、教学要求介绍单自由度振动系统的工程实际背景,给出描述这一自然现象的力学模型,通过牛顿法和拉氏法建立数学模型及其简化理由和适用条件。
给出固有频率、阻尼特性及它们在自由振动中的物理意义,着重讲解幅频特性、相频特性曲线的物理意义及其在工程设计、控制中的重要作用。

机械振动常用英语词汇表Aacceleration 加速度accelerometer加速度计algebraic 代数的amplitude 振幅,幅度,幅值amplitude-frequency characteristics 幅频特性amplitude-frequency curve幅频特性曲线amplitude spectrum 幅值谱angular velocity 角速度aperiodic 非周期的average value 均值axis 轴,轴线,坐标轴Bbeam 梁beating 拍boundary condition 边界条件Ccantilever 悬臂centrifugal 离心的centrifugal force 离心力characteristic determinant特征行列式characteristic equation 特征方程characteristic matrix 特征矩阵circular frequency 圆频率clamped 固支的clamped-hinged 固支-铰支的clockwise 顺时针的coefficient系数column matrix 列矩阵condition monitoring 状态监测converge 收敛converged 收敛的convolution 卷曲,卷积convolution integral 卷积积分column 列coordinate 坐标coulomb damping 库仑阻尼counterclockwise 逆时针的coupling 耦合critical speed 临界转速critically damped 临界阻尼的Ddamper 阻尼器damped free vibration有阻尼自由振动damped natural frequency有阻尼固有频率damping 阻尼damping factor 阻尼系数damping ratio 阻尼比decay 衰减deflection 位移,挠度degree of freedom 自由度denominator 分母density 密度derivative 导数determinant 行列式diagonal matrix 对角矩阵differential 微分的dimensionless 无量纲的discrete 离散的disk 盘displacement 位移dissipate 耗散divide 除DOF (degree of freedom) 自由度Duhamel’s Integral杜哈美积分Dunkerley’s method 邓克利法dynamic coupling 动力耦合dynamic matrix 动力矩阵Eeccentric mass 偏心质量eccentricity 偏心距effective mass有效质量effective value,RMS value 有效值eigenvalue 特征值eigenvector 特征向量elastic body 弹性体element 元素,单元equilibrium 平衡equivalent viscous damping等效粘性阻尼exponential 指数的FFast Fourier Transform快速傅立叶变换factorize 分解因式flexibility 柔度flexibility matrix 柔度矩阵forced harmonic vibration强迫简谐振动forced vibration 强迫振动Fourier series傅里叶级数Fourier transform傅立叶变换free vibration自由振动free response自由响应frequency ratio频率比fundamental frequency 基频fundamental frequency vibration基频振动fundamental mode 第一阶模态Ggeneral solution 通解generalized coordinates 广义坐标generalized force 广义力generalized mass 广义质量generalized stiffness 广义刚度gravitational force 重力Hharmonic 简谐的harmonic force 简谐激振力harmonic motion 简谐运动homogeneous 齐次的homogeneous equation 齐次方程Hooke’s law 虎克定律Iidentity matrix 单位矩阵impulse excitation 冲击激励impulse response function冲击响应函数independent coordinate 独立坐标inertia force, inertial force 惯性力initial condition 初始条件initial phase 初相位integral 积分的inverse matrix 逆矩阵iteration 迭代Kkinetic energy 动能Llinear 线性的logarithm 对数logarithmic decrement 对数衰减率longitudinal 纵向的lumped mass 集中质量Mmass matrix 质量矩阵matrix iteration 矩阵迭代法modal coordinates 模态坐标modal damping ratio 模态阻尼比modal mass 模态质量modal matrix 模态矩阵,振型矩阵modal stiffness 模态刚度modal testing 模态试验mode shape 振型(模态)modulus of elasticity 弹性模量moment 弯矩multi-degree-of- freedom system 多自由度系统multiply 乘Nnatural frequency 固有频率natural logarithm 自然对数nondimensional 无量纲的normal force 法向力normalization 正则化normal mode 主振型numerator (分数的)分子Ooff-diagonal element非对角元素orthogonal 正交的orthogonality 正交性orthonormal mode 正则振型oscillatory 振动的,摆动的oscillatory motion 振荡运动overdamped 过阻尼的Pparallel 并联,平行partial differential 偏微分particular solution 特解peak value 峰值pendulum (钟)摆periodic 周期的periodic motion 周期运动phase 相位phase frequency characteristics 相频特性phase frequency curve相频特性曲线polar moment of inertia极转动惯量polynomial 多项式potential energy 势能power 幂(乘方),功率premultiply 左乘,前乘principal coordinate 主坐标principal frequency 主频率principal mass 主质量principal vibration 主振动principal stiffness 主刚度principle of superposition叠加原理product 乘积pulse excitation 脉冲激励Qquasi-periodic vibration准周期振动quotient 商R radian 弧度random vibration 随机振动Rayleigh method 瑞利法Rayleigh quotient 瑞利商Rayleigh-Ritz Method瑞利-里兹法real symmetric matrix 实对称矩阵reciprocal 倒数的,倒数recurrence formula递推公式, 循环resolution 分辨率resonance 共振rigid body 刚体rms 均方根rod 杆root mean square 均方根root solving 求根rotating machine 旋转机械rotor 转子rotor-support system转子支承系统row 行row matrix 行矩阵Sself-excited vibration 自激振动series 串联shaft 轴shaft vibration 轴振动shear 剪力shear modulus of elasticity剪切弹性模量shock excitation 冲击激励shock isolation 振动隔离shock response 冲击响应SI (International System of Units)国际(单位)制simply supported 简支的singular matrix 奇异矩阵single-DOF 单自由度slope 转角,斜率spin 旋转spring 弹簧square root 平方根state vector 状态向量static coupling 静力耦合static equilibrium position静平衡位置steady state 稳态step function 阶跃函数stiffness 刚度stiffness influence coefficient刚度影响系数stiffness matrix 刚度矩阵strain 应变stress 应力structural damping 结构阻尼subscript 下标successive 接连不断的support motion 支承运动symmetric matrix 对称矩阵Ttangent 切线,正切tangential 切向的tensile 拉力的,张力的tension 张力,拉力terminology 术语torque 扭矩, 转矩torsion 扭转torsional 扭转的torsional stiffness 抗扭刚度torsional vibration扭转振动TR (transmissibility) 传递率,trace of the matrix 矩阵的迹transfer matrix method传递矩阵法transient response 瞬态响应transient vibration 瞬态振动transmissibility 隔振系数transpose 转置trial 测试,试验triangular matrix 三角矩阵truncation error截断误差,舍位误差twist 扭,转Uunbalance 不平衡unbalance response 不平衡响应underdamped 欠阻尼的unit impulse 单位脉冲unit matrix 单位矩阵unit vector 单位向量unsymmetric 非对称upper triangular matrix 上三角阵Vvelocity 速度vertical vibration 垂直振动vibration 振动vibration absorber 吸振器vibration isolation 隔振viscous damping 粘性阻尼。
机械振动常用解题方法例析上海师范大学附属中学李树祥一、等效模型法:水平方向的弹簧振子和小摆角条件下的单摆是简谐振动的两个最基本最典型的模型,某一物理问题中的研究对象如果与它们具有类似的运动规律,我们就可利用原有模型的已知结论,以简化求解。
因此解题时可把一些物体的运动等效为单摆模型,等效单摆的周期公式可以广义地表示为,式中为等效摆长,为等效重力加速度。
等效摆长等于等效摆球的重心到等效悬点的距离(也就是摆球做圆周运动的半径)。
等效重力加速度的大小等于摆球的视重(摆球相对悬点静止时线的拉力F与摆球的质量m之比),即。
求的基本步骤如下:(1)分析摆球的受力,确定摆球相对静止的位置(即平衡位置)。
(2)计算摆球的视重。
(3)利用,求出等效重力加速度。
应当注意,在计算拉力时,不能将始终沿悬线方向的力(法线方向)包括在内。
因为只有对回复力有贡献的力,才能改变振动周期。
例1、如图1所示的摆球,由于受到横向风力的作用,偏过角。
若绳长为l,摆球质量为m,且风力稳定,当摆球在纸平面内平衡位置附近振动时,其周期为()。
A. B.C. D.析解:平衡时摆球受重力mg,风力,线的拉力,受力分析如图2所示。
由力的平衡可得,摆球的视重为,等效重力加速度为图1图2所以摆的周期为,故选项B 正确。
例2、如图3所示,光滑圆弧槽半径为R ,A 为最低点,C 到A距离远小于R ,两小球B 和C 都由静止开始释放,问哪一个小球先到A 点?析解:B 球到A 点时间用自由落体运动规律求解,其时间:,由于C 到A 距离远小于R ,故小球C 的运动可等效为单摆。
C 球第一次到达A 点用单摆周期公式:。
显然,,即B 球先到。
讨论:要使两球在A 点相遇,可使B 球上移,问此时B 球高度h 为多少?分析:B 球下落时间为:,又C 点运动具有重复性,两球相遇时间必有多解,相应的h 值亦应有多解:,解得:,故选项B 正确。
二、对称法:就是利用简谐运动相对平衡位置对称的两点,加速度、回复力、位移均为等值反向,速度可能相同也可能等值反向,动能、势能一定相同的这些特点来分析问题的方法。
机械振动中的特征值问题机械振动是指系统在某一位置(通常是静平衡位置,简称平衡位置)附近所作的往复运动。
显然这是一种特殊形式的机械运动。
人类的大多数活动都包括这样或那样的机械振动。
例如,我们能听见周围的声音是由于鼓膜的振动;我们能看见周围的物体是由于光波振动的结果;人的呼吸与肺的振动紧密相关;行走时人的腿和手臂也都在作机械振动;我们能讲话正是喉咙(和舌头)作机械振动的结果。
早期机械振动研究起源于摆钟与音乐。
至20世纪上半叶,线性振动理论基本建立起来。
欧拉(Euler)于1728年建立并求解了单摆在阻尼介质中运动的微分方程。
1739年他研究了无阻尼简谐强迫振动,从理论上解释共振现象。
1747年他对n个等质量质点由等刚度弹簧连接的系统列出了微分方程组并求出精确解,从而发现系统的振动是各阶简谐振动的叠加。
1760年拉格朗日(Lagrange)建立了离散系统振动的一般理论。
最早研究的连续系统是弦线。
1746年达朗伯(d’Alembert)用片微分方程描述弦线振动而得到波动方程并求出行波解。
1753年伯努利(Bernoulli)用无穷多个模态叠加的方法得到弦线振动的驻波解。
1759年拉格朗日从驻波解推得性波解,但严格的数学证明直到1811年傅里叶(Fourier)提出函数的级数展开理论才完成。
一个振动系统本质上是一个动力系统,这是由于其变量如所受到的激励(输入)和相应(输出)都是随时间变化的。
一个振动系统的响应一般来说是依赖于初始条件和外部激励的。
大多数实际振动系统都十分复杂,因而在进行数学分析时把所有的细节都考虑进来是不可能的。
为了预测在指定输入下振动系统的行为,通常只是考虑那些最重要的特性。
也会经常遇到这样的情况,即对一个复杂的物理系统,即使采用一个比较简单的模型也能够大体了解其行为。
对一个振动系统进行分析通常包括以下步骤。
步骤1,建立数学模型。
建立数学模型的目的是揭示系统的全部重要特性,从而得到描述系统动力学行为的控制方程。
机械振动理论及其应用作业——振动分析研究的内容学号:专业:机械工程学生姓名:2013年11月24日第一节机械振动的基本概念所谓振动,就是物体或某种状态随时间作往复变化的现象。
振动包括机械振动与非机械振动。
例如,钟摆的来回摆动,房屋由于风力、地震或机械设备引起的振动,桥梁由于车辆通过引起的振动等,这一类振动属于机械振动;另一类振动属于非机械运动的振动现象,例如声波、光波、电磁波等。
机械振动所研究的对象是机械或结构,在理论分析中要将实际的机械或结构抽象为力学模型,即形成一个力学模型。
可以产生机械振动的力学模型,称为振动系统。
一般来说,任何具有弹性和惯性的力学系统均可能产生机械振动。
振动系统发生振动的原因是由于外界对系统运动状态的影响,即外界对系统的激励或作用。
如果外界对某一个系统的作用使得该系统处于静止状态,此时系统的几何位置称为系统的静平衡位置。
依据系统势能在静平衡位置附近的性质,系统的静平衡位置可以分为稳定平衡、不稳定平衡和随遇平衡等几种状况。
机械振动中的平衡位置是系统的稳定平衡位置。
系统在振动时的位移通常是比较小的,因为实际结构的变形时比较小的。
对于工程实际中的结构振动问题,人们关心振动会不会使结构的位移、速度、加速度等物理量过大,因为位移过大可能引起结构各个部件之间的相互干涉。
比如汽车的轮轴与大梁会因为剧烈振动而频繁碰撞,造成大梁过早损坏,并危及行车安全。
为了避免振动危害,甚至利用振动进行工作,我们应了解结构振动的规律,并在实际工作中应用这些规律。
第二节振动的分类机械振动可根据不同的特征加以分类。
1、按振动的输入特性分自由振动系统受到初始激励作用后,仅靠其本身的弹性恢复力自由地振动,其振动的特性仅决定于系统本身的物理特性(质量m、刚度k)。
受迫振动又称强迫振动,系统受到外界持续的激励作用而被迫地产生振动,其振动特性除决定于系统本身的特性外,还决定于激励的特性。
自激振动有的系统由于具有非振荡性能源或反馈特性,从而产生一种稳定持续的振动。
一、单自由度系统的振动2()()0()(nmx t kx t x t w x t +=⇔+120)cos sin cos n n A w t A w t x =+=2()()()0()2()()0n n mx t cx t kx t x t w x t w x t ξ++=++= 211)(nn w t w t e X e ξξ--=+自然频率 阻尼率 22n c c mw mkξ==w 2()2()(()cos(n n nw td x t w x t w x t t C ew t ξξψ-++=-:尼激0 ()cos(n x t C w t =-幅频曲线及其特性 ()H w 1:此时力与位移相位相反sin nwt c =/2/22T T T -=⎰周期函数将失去周期性,而离散频谱将转化为连续谱,此时傅里()()(mx t cx t kx t ++21)[1(/)n n c k w w ∞==-∑00sin n dx x ξωω+0sin n n x t ωω +自由振动是强迫振动的基础,任一时刻的强迫振动响应其实只是该时刻前被激起的一系列自由振动的叠加。
2()2()()n nx t w x t w x t ξ++=1()()()2iwtt H w F w e dw π+∞-∞=⎰()()()mx t cx t kx t ++=拉普拉斯变换:()(0)(()()()F s mx ms X s D s D s ++=+拉氏反变换:11()[()]2jw jwx t L X s j γγπ+--==⎰牛顿第二定律、定轴转动方程、能量原理、拉格朗日方程一般情况采用解析法求解,对于非线性方程,常采用数值方法求解振动系统反作用力近似为位移和速度的函数:)x 泰勒展开并取cx 结论:弹簧刚度与阻尼系数实际上是泰勒展开式中定义:单位位移所需要的力。
弹簧串联、并联,关键在于共力还是共位移用积分计算结构运动时的动能,得到某结构的等效质量/d m ;经变形法;能量法:max V不变,响应振幅与激振力振幅正比,为滞后激励多少,Ψ初相位微小的阻尼就可以限制振幅的无限扩大共振需要一个较长的建立过程,机器需有足够的加速功率顺利通过共振区。
串联 111, ,k k k 1 k 2 并联 k = K k 2单自由度无阻尼自由振动k ,X = x o COS nm,⑵求固有频率:定义法 静变形法「nV d t(3)求响应:A^^(x 0, x 0)单自由度有阻尼自由振动尸丿xo +S nXo : 77 ( 1)x=x 0cos d t- —°sin,d t,,d = .1-J- 2 单自由度有阻尼强迫振动 简谐力直接激励mx ex kx = F sin t, x = Bsin( t- :),4 2匚扎 -=tg -1-^ 无阻尼时,B :—F.k|1 —阳弹簧串并联x = Asi n(m n t +8), A =x 0A(x 0)2c =tg 」3) r x(1)求微分方程:定理法,能量法dtk i k 22 2mx kx = 0, x 】j :n x =t ^sin Z,mx ex kx = 0,x 2 n x=0,2m ne小,C cr =2 mn, CerX = Ae —冷 sin®d t+T),A= .'x 。
2+皆3"0)2,日=tg 」(=x^dV2二 n X o 、2■dx o 「'nJB =k\ (1 - -2)2(2X st (1 _ '2)2(2 ' )22mx ex kx 二 m 0e • sin t,x 二 Bsin( t - 一),2 R2 m °e , m °e ,-,' ------------ P -,(1 - 2)2(2 ■ )2 '单自由度有阻尼强迫振动mx ex kx 二 ex g kx g 二 X g . k 2(c ■ )2sin(・t v ),J - tg ,(2:.; ), x = B sin(,t v - : ), : = tg J (—__ )1 -人 X g j k 2+a )2X g J 1 +(20)2B =—・ =―■ ,心(1 一 '2)2(2,)2..(1 一,2)2(2,)2—= -1 (2二)一,、- 1,隔振要有适当阻尼X g ,(1- 2)2(2 )2单自由度有阻尼强迫振动 周期激励叠加原理mX cX kx =匚⑴ f 2(t)X = % x 2傅立叶级数展开单自由度有阻尼强迫振动任意激励(1) 时域求解:杜哈美积分1 tx F( )e_ n(t —)sin d (t - )dm d 0(2) 频域求解:傅立叶变换1 X( ) F()二 H( )F( •),Z 仰)1Z( 0 -k -m 2jc,机械阻抗,H(「) 一 ,机械导纳,频响函数, Z®) X(s)二G(s)F(s),G(s) ,传递函数。
机械振动大作业姓名:徐强学号:SX1302106专业:航空宇航推进理论与工程能源与动力学院2013年12月简支梁的振动特性分析题目:针对简支梁、分别用单、双、三、十个自由度以及连续体模型,计算其固有频率、固有振型。
单、双、三自由度模型要求理论解;十自由度模型要求使用李兹法、霍尔茨法、矩阵迭代法、雅可比法、子空间迭代法求解基频;连续体要求推导理论解,并通过有限元软件进行数值计算。
解答:一、 单自由度简支梁的振动特性如图1,正方形截面(取5mm ×5mm )的简支梁,跨长为l =1m ,质量m 沿杆长均匀分布,将其简化为单自由度模型,忽略阻尼,则运动微分方程为0=+••kx x m ,固有频率ωn =eqeq m k ,其中k 为等效刚度,eq m 为等效质量。
因此,求出上述两项即可知单自由度简支梁的固有频率。
根据材料力学的结果,由于横向载荷F 作用在简支梁中间位置而引起的变形为)(224348EI F -)(x l x x y -=(20l x ≤≤), 48EI F -3max l y =为最大挠度,则: eq k =δF=348EIl 梁本身的最大动能为:)(224348EI F -)(x l x x y -==)(223max43x l lx y -T max =2×dx x y l m l 220)(21⎭⎬⎫⎩⎨⎧•⎰=2max 351721•y m )( 如果用eq m 表示简支梁的质量等效到中间位置时的大小,它的最大动能可表示为:T max =2max21•y m eq所以质量为m 的简支梁,等效到中间位置的全部质量为: m m eq 3517=故单自由度简支梁横向振动的固有频率为:ωn =eqeq m k =3171680ml EImk图1 简支梁的单自由度模型二、 双自由度简支梁的振动特性如图2,将简支梁简化为双自由度模型,仍假设在简支梁中间位置作用载荷,根据对称性,等效质量相等,因此只要求出在3/l 处的等效质量即可。