非线性规划模型
- 格式:doc
- 大小:329.50 KB
- 文档页数:6
非线性规划模型在管理科学中的应用研究绪论管理科学是一门研究如何应用科学方法和技术来解决管理问题的学科,其中非线性规划模型作为一种重要的工具,得到了广泛的应用和研究。
本文将从理论和实践两个方面探讨非线性规划模型在管理科学中的应用研究。
一、非线性规划模型的理论基础非线性规划模型是在约束条件下,求解非线性目标函数的最优解。
它的理论基础主要包括最优性条件、解的存在性和稳定性等方面。
其中,最优性条件是非线性规划问题的核心内容之一,包括一阶和二阶条件。
一阶条件主要包括最优解的必要条件和克拉默条件。
最优解的必要条件要求目标函数在最优解处的偏导数等于零,这意味着最优解的局部均衡点满足一阶条件。
克拉默条件要求约束函数在最优解处的梯度向量线性相关,这可以帮助我们判断最优解的全局特性。
二阶条件主要包括最优解的充分条件和李普希茨条件。
最优解的充分条件要求目标函数的海森矩阵在最优解处半正定,这保证了最优解的局部最小性。
李普希茨条件要求约束函数在最优解处的雅可比矩阵满秩,这可以帮助我们判断最优解的全局稳定性。
二、非线性规划模型的应用场景非线性规划模型可以广泛应用于管理科学中的各个领域,如生产计划、供应链管理、投资组合等。
在生产计划中,我们可以利用非线性规划模型来优化产品的生产数量和生产调度,以最大化产能利用率和实现生产成本最小化。
在供应链管理中,非线性规划模型可以用于确定最佳的供应链网络结构和物流配送路线,以最大程度地降低运输成本和缩短交货时间。
在投资组合中,非线性规划模型可以用于确定最佳的资产配置比例,从而实现收益最大化和风险最小化。
三、非线性规划模型的实践应用案例以下以某公司生产计划为例,说明非线性规划模型在实践中的应用。
某公司的生产计划包括两个阶段,每个阶段有不同的生产能力和生产成本。
为了最大化利润,公司需要确定每个阶段的生产数量。
首先,我们可以建立一个非线性规划模型,将利润最大化作为目标函数,将每个阶段的生产数量作为决策变量,将约束条件包括生产能力、市场需求等考虑进去。
运筹学模型的类型运筹学模型是指通过数学方法来描述和解决复杂问题的一种工具。
根据问题的性质和要求,运筹学模型可以分为以下几种类型:1. 线性规划模型(Linear Programming Model,简称LP):线性规划是一种优化问题,它的目标是在满足一些约束条件下,使某个线性函数取得最大或最小值。
线性规划模型广泛应用于生产调度、资源分配、物流运输等领域。
2. 整数规划模型(Integer Programming Model,简称IP):整数规划是线性规划的扩展,它要求决策变量只能取整数值。
整数规划模型常用于生产调度、排产计划、网络设计等问题。
3. 非线性规划模型(Nonlinear Programming Model,简称NLP):非线性规划是一种优化问题,它的目标函数和约束条件都可以是非线性的。
非线性规划模型广泛应用于经济学、金融学、工程学等领域。
4. 动态规划模型(Dynamic Programming Model,简称DP):动态规划是一种优化方法,它将一个复杂问题分解为若干个子问题,并逐步求解这些子问题。
动态规划模型常用于生产调度、资源分配、投资决策等问题。
5. 排队论模型(Queuing Theory Model,简称QT):排队论是一种研究等待线性的数学理论,它可以用来描述和分析顾客到达、服务时间、系统容量等因素对系统性能的影响。
排队论模型广泛应用于交通运输、通信网络、医疗卫生等领域。
6. 决策树模型(Decision Tree Model,简称DT):决策树是一种分类和回归的方法,它可以将一个问题分解为若干个子问题,并逐步求解这些子问题。
决策树模型常用于金融风险评估、医学诊断、市场营销等领域。
总之,不同类型的运筹学模型适用于不同的问题领域和求解目标,选择合适的模型可以帮助我们更好地解决实际问题。
非线性规划(nonlinear programming)1.非线性规划概念非线性规划是具有非线性约束条件或目标函数的数学规划,是运筹学的一个重要分支。
非线性规划研究一个n元实函数在一组等式或不等式的约束条件下的极值问题,且目标函数和约束条件至少有一个是未知量的非线性函数。
目标函数和约束条件都是线性函数的情形则属于线性规划。
2.非线性规划发展史公元前500年古希腊在讨论建筑美学中就已发现了长方形长与宽的最佳比例为0.618,称为黄金分割比。
其倒数至今在优选法中仍得到广泛应用。
在微积分出现以前,已有许多学者开始研究用数学方法解决最优化问题。
例如阿基米德证明:给定周长,圆所包围的面积为最大。
这就是欧洲古代城堡几乎都建成圆形的原因。
但是最优化方法真正形成为科学方法则在17世纪以后。
17世纪,I.牛顿和G.W.莱布尼茨在他们所创建的微积分中,提出求解具有多个自变量的实值函数的最大值和最小值的方法。
以后又进一步讨论具有未知函数的函数极值,从而形成变分法。
这一时期的最优化方法可以称为古典最优化方法。
最优化方法不同类型的最优化问题可以有不同的最优化方法,即使同一类型的问题也可有多种最优化方法。
反之,某些最优化方法可适用于不同类型的模型。
最优化问题的求解方法一般可以分成解析法、直接法、数值计算法和其他方法。
(1)解析法:这种方法只适用于目标函数和约束条件有明显的解析表达式的情况。
求解方法是:先求出最优的必要条件,得到一组方程或不等式,再求解这组方程或不等式,一般是用求导数的方法或变分法求出必要条件,通过必要条件将问题简化,因此也称间接法。
(2)直接法:当目标函数较为复杂或者不能用变量显函数描述时,无法用解析法求必要条件。
此时可采用直接搜索的方法经过若干次迭代搜索到最优点。
这种方法常常根据经验或通过试验得到所需结果。
对于一维搜索(单变量极值问题),主要用消去法或多项式插值法;对于多维搜索问题(多变量极值问题)主要应用爬山法。
非线性规划模型在上一次作业中,我们对线性规划模型进行了相应的介绍及优缺点,然而在实际问题中并不是所有的问题都可以利用线性规划模型求解;实际问题中许多都可以归结为一个非线性规划问题,即如果目标函数和约束条件中包含有非线性函数,则这样的问题称为非线性规划问题;一般来说,解决非线性的问题要比线性的问题难得多,不像线性规划有适用于一般情况的单纯形法;对于线性规划来说,其可行域一般是一个凸集,只要存在最优解,则其最优解一定在可行域的边界上达到;对于非线性规划,即使是存在最优解,却是可以在可行域的任一点达到,因此,对于非线性规划模型,迄今为止还没有一种适用于一般情况的求解方法,我们在本文中也只是介绍了几个比较常用的几个求解方法;一、非线性规划的分类1无约束的非线性规划当问题没有约束条件时,即求多元函数的极值问题,一般模型为此类问题即为无约束的非线性规划问题无约束非线性规划的解法一般迭代法即为可行方向法;对于问题()min 0x R f X X ∈⎧⎪⎨≥⎪⎩给出)(x f 的极小点的初始值)0(X ,按某种规律计算出一系列的),2,1()( =k X k ,希望点阵}{)(k X 的极限*X 就是)(x f 的一个极小点;由一个解向量)(k X 求出另一个新的解向量)1(+k X向量是由方向和长度确定的,所以),2,1()1( =+=+k P X X k k k k λ即求解k λ和k P ,选择k λ和k P 的原则是使目标函数在点阵上的值逐步减小,即 检验}{)(k X 是否收敛与最优解,及对于给定的精度0>ε,是否ε≤∇+||)(||1k X f ; 一维搜索法当用迭代法求函数的极小点时,常常用到一维搜索,即沿某一已知方向求目标函数的极小点;一维搜索的方法很多,常用的有:1试探法“成功—失败”,斐波那契法,法等;2插值法抛物线插值法,三次插值法等;3微积分中的求根法切线法,二分法等;考虑一维极小化问题若)(t f 是],[b a 区间上的下单峰函数,我们介绍通过不断地缩短],[b a 的长度,来搜索得)(min t f b t a ≤≤的近似最优解的两个方法;通过缩短区间],[b a ,逐步搜索得)(min t f bt a ≤≤的最优解*t 的近似值选择一个使函数值下降速度最快的的方向;把)(x f 在)(k X 点的方向导数最小的方向作为搜索方向,即令)(k k X f P -∇=.计算步骤:1选定初始点0X 和给定的要求0>ε,0=k ;2若ε<∇||)(||k X f ,则停止计算,k X X =*,否则)()(k k X f P -∇=; 3在)(k X 处沿方向)(k P 做一维搜索得1,)1(+=+=+k k P X X k k k k 令λ,返回第二步,直到求得最优解为止.可以求得:共轭梯度法可以得到——能够证明向量——是线性无关的,且关于A 是两两共轭的;从而可得到——,则——为——的极小点;计算步骤:1对任意初始点n E X ∈)1(和向量)()1()1(X f P -∇=,取;1=k2若0)()(=∇k X f ,即得到最优解,停止计算,否则求3令1+=k k ;返回2对于问题:由,0)(=+=∇B AX X f 则由最优条件,0)(=∇X f 当A 为正定时,1-A 存在,于是有B A X 1*--=为最优解 对于一般的二阶可微函数)(X f ,在)(k X 点的局部有当)()(2k X f ∇正定时,也可用上面的牛顿法,这就是拟牛顿法;计算步骤:(1)任取n E X ∈)1(,;1=k2计算)()(k k X f g ∇=,若0=k g ,则停止计算,否则计算)()()(2k k X f X H ∇=,令k k k k g X H X X 1)1())((-+-=;3令1+=k k ;返回22有约束的非线性规划非线性规划的最优性条件若*X 是非线性问题中的极小点,且对点*X 有效约束的梯度线性无关,则必存在向量()****12,,,Tm γγγΓ=使下述条件成立: 此条件为库恩-塔克条件K-T 条件,满足K-T 条件的点也称为K-T 点;K-T 条件是非线性规划最重要的理论基础,是确定某点是否为最优解的必要条件,但不一定是充要条件;对于凸规划它一定是充要条件;非线性规划的可行方向法由于线性规划的目标函数为线性函数,可行域为凸集,因而求出的最优解就是整个可行域上的全局最优解;非线性规划却不然,有时求出的某个解虽是一部分可行域上的极值点,但并不一定是整个可行域上的全局最优解;假设()kX 非线性规划问题中的一个可行解,但不是最优解,为了进一步寻找最优解在它的可行下降方向中选取其中一个方向()kD ,并确定最佳步长k λ,使得 反复进行这一过程,直到得到满足精度要求为止,这种方法称为可行方向法,也称迭代法;有约束非线性规划的解法外点法1对于等式约束问题做辅助函数如果最优解*X 满足或近似满足,),,2,1(0)(*m j X h i ==则*X 就是问题的最优解或近似解2对于不等式约束问题做辅助函数求),(min 2M X P X. 3对于一般问题做辅助函数求解),(min 3M X P X内点法内点法是在可行域内进行得,并一直保持在可行域内进行搜索,只适用于不等式约束的问题辅助函数:X 趋于R 的边界时,使)(X B 趋向于正无穷,)(X B 的常用形式 求解},,2,1,0)(|{),(min 00m j X g X R r X Q j R X =>=∈二.非线性规划的缺陷不足 算法 优点 缺点梯度法 计算量小,存储变量较少,初始点要求不高 初值依赖,收敛慢,最速下降法适用于寻优过程的前期迭代或作为间插步骤,越接近极值点时,收敛熟读越慢,后期宜选用收敛快的算法 牛顿法 收敛速度很快 当维数较高时,计算的工作量很大,初值依赖,当初值选择不好时,有可能计算出现异常,导致迭代无法进行,该法需要修正拟牛顿法 收敛速度快,避免牛顿矩阵求逆运算,算法更稳定 初值依赖程度相对牛顿法减弱,但仍然存在。
非线性规划与多目标规划模型及其求解一、实验目的及意义[1] 学习非线性规划模型的标准形式和建模方法;[2] 掌握建立非线性规划模型的基本要素和求解方法;[3] 熟悉MATLAB 软件求解非线性规划模型的基本命令;[4] 通过范例学习,了解建立非线性规划模型的全过程,与线性规划比较其难点何在。
通过该实验的学习,使学生掌握最优化技术,认识面对什么样的实际问题,提出假设和建立优化模型,并且使学生学会使用MATLAB 软件进行非线性规划模型求解的基本命令,并进行灵敏度分析。
解决现实生活中的最优化问题是本科生学习阶段中一门重要的课程,因此,本实验对学生的学习尤为重要。
二、实验内容1.建立非线性规划模型的基本要素和步骤;2.熟悉使用MATLAB 命令对非线性规划模型进行计算与灵敏度分析;3.学会计算无约束优化问题和有约束优化问题的技巧。
三、实验步骤1.开启MATLAB 软件平台,开启MATLAB 编辑窗口;2.根据问题,建立非线性规划模型,并编写求解规划模型的M 文件;3.保存文件并运行;4.观察运行结果(数值或图形),并不断地改变参数设置观察运行结果;5.根据观察到的结果和体会,写出实验报告。
四、实验要求与任务根据实验内容和步骤,完成以下实验,要求写出实验报告(实验目的→问题→数学模型→算法与编程→计算结果→分析、检验和结论)基础实验1求解无约束优化1) 画出该曲面图形, 直观地判断该函数的最优解;2) 使用fminunc 命令求解, 能否求到全局最优解?120.5(cos(2)cos(2))12min (,)2022.713..55,1,2x x i f x x e e s t x i ππ-+=--+-≤≤=2. 求解非线性规划,试判定你所求到的解是否是最优?应用实验3.贷款方案某服装连锁店老板希望开办三家新商店:一家在北京,一家在上海.开办这些商店分别需要170万,250万, 100万元.为对此计划融资,该老板与三家银行进行了联系.见表6.1 三家银行对各个项目的贷款利率根据商店的位置和对相关风险的评估,每家银行都决定至多提供8年期总值为300万元的贷款,但对不同商店项目的利率各不相同(见表6.1).请制定从这些银行进行贷款的方案,以使每个商店都能得到所需的资金,并使总支出最小.4. 组合投资问题设有8种投资选择:5支股票,2种债券,黄金. 投资者收集到这些投资项目的年收益率的历史数据 (见表6.1), 投资者应如何分配他的投资资金,即需要确定这8种投资的最佳投资分配比例.421237212221371230.201max 10..67500.419010036,05,0125x x x z s t x x x x x x x =-≥-≥≤≤≤≤≤≤注: 基础实验全做, 应用实验4.下面的是2016年经典励志语录,需要的朋友可以欣赏,不需要的朋友下载后可以编辑删除!!谢谢!!1、有来路,没退路;留退路,是绝路。
非线性规划什么是非线性规划?非线性规划(Nonlinear Programming,简称NLP)是一种数学优化方法,用于求解包含非线性约束条件的优化问题。
与线性规划不同,非线性规划中的目标函数和约束条件都可以是非线性的。
非线性规划的数学表达式一般来说,非线性规划可以表示为以下数学模型:minimize f(x)subject to g_i(x) <= 0, i = 1, 2, ..., mh_j(x) = 0, j = 1, 2, ..., px ∈ R^n其中,f(x)是目标函数,g_i(x)和h_j(x)分别是m个不等式约束和p个等式约束,x是优化变量,属于n维实数空间。
非线性规划的解法由于非线性规划问题比线性规划问题更为复杂,因此解决非线性规划问题的方法也更多样。
以下列举了几种常用的非线性规划求解方法:1. 数值方法数值方法是最常用的非线性规划求解方法之一。
它基于迭代的思想,通过不断优化目标函数的近似解来逼近问题的最优解。
常见的数值方法有梯度下降法、牛顿法、拟牛顿法等。
2. 优化软件优化软件是一类针对非线性规划问题开发的专用软件,它集成了各种求解算法和优化工具,可以方便地求解各种类型的非线性规划问题。
常见的优化软件有MATLAB、GAMS、AMPL等。
3. 线性化方法线性化方法是一种将非线性规划问题转化为等价的线性规划问题的求解方法。
它通过线性化目标函数和约束条件,将非线性规划问题转化为线性规划问题,然后利用线性规划的求解方法求解得到最优解。
4. 分类方法分类方法是一种将非线性规划问题分解为若干个子问题求解的方法。
它将原始的非线性规划问题分解为多个子问题,然后将每个子问题分别求解,并逐步逼近原始问题的最优解。
以上仅是非线性规划求解方法的一小部分,实际上还有很多其他的方法和技巧可供选择。
在实际应用中,选择合适的方法和工具是非常重要的。
非线性规划的应用非线性规划在实际生活和工程中有着广泛的应用。
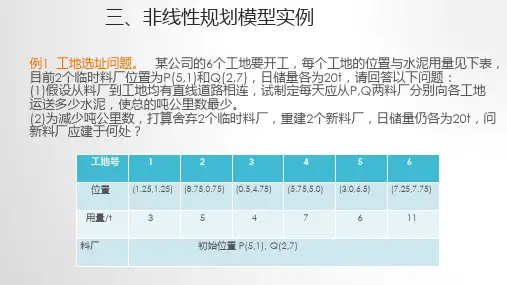
非线性规划模型一、非线性规划问题线性规划和整数规划的目标函数和约束条件都是自变量的线性函数,但在实践中还有大量的问题,其目标函数或约束条件很难用线性函数来表达.如果目标函数或约束条件中有非线性函数,则称这种规划问题为非线性规划问题.问题1 容器设计问题.(1) 问题提出:某公司专门生产储藏用容器,订货合同要求该公司制造一种敞口的长方体容器,容积恰好为12m 3,该种容器的底必须为正方形,容器总质量不超过68kg.已知用作容器四壁的材料为10元/m 2,重3kg ;用作容器底的材料20元/m 2,重2kg.试问制造该容器所需的最小费用是多少?(2) 模型建立:设该容器的底边长和高分别为1x 、2x ,则问题的数学模型为2121min ()4020()f X x x x =+容器的费用21221211212..122680,0x x s t x x x x x ⎧=⎪+≤⎨⎪≥≥⎩问题2 营业计划的制定.(1) 问题提出:某公司经营两种设备,第一种设备每件售价450元,据统计,售出一件第一种设备所需要的营业时间平均是0.5h ,第二种设备是(2+0.252x )h ,其中2x 是第二种设备的售出数量.已知该公司在这段时间内的总营业时间为800h ,试决定使其营业额最大的营业计划.(2) 模型建立:该公司计划经营第一种设备1x 件和第二种设备2x 件,其数学模型为(同问题一类似)二、非线性规划问题的数学模型非线性规划问题的数学模型常表示成以下形式:min(max)()f X 或()0(1,2,,)..()(0)(1,2,,)i i h X i m s t g X i n ==⎧⎨≥≤=⎩或其中,12(,,,),()n X x x x f X =为目标函数,()0()0i i h X X =≥和g 为约束条件.训练题某厂向用户提供发动机,合同规定,第一、二、三季度末分别交货40台、60台、80台.每季度的生产费用为()2f x ax bx =+(单位:元), 其中x 是该季度生产的台数.若交货后有剩余,可用于下季度交货,但需支付存储费,每台每季度c 元.已知工厂每季度最大生产能力为100台,第一季度开始时无存货,设a=50、b=0.2、c=4,问:工厂应如何安排生产计划,才能既满足合同又使总费用最低.讨论a 、b 、c 变化对计划的影响,并作出合理的解释.。
非线性规划模型 在上一次作业中,我们对线性规划模型进行了相应的介绍及优缺点,然而在实际问题中并不是所有的问题都可以利用线性规划模型求解。
实际问题中许多都可以归结为一个非线性规划问题,即如果目标函数和约束条件中包含有非线性函数,则这样的问题称为非线性规划问题。
一般来说,解决非线性的问题要比线性的问题难得多,不像线性规划有适用于一般情况的单纯形法。
对于线性规划来说,其可行域一般是一个凸集,只要存在最优解,则其最优解一定在可行域的边界上达到;对于非线性规划,即使是存在最优解,却是可以在可行域的任一点达到,因此,对于非线性规划模型,迄今为止还没有一种适用于一般情况的求解方法,我们在本文中也只是介绍了几个比较常用的几个求解方法。
一、非线性规划的分类 1无约束的非线性规划
当问题没有约束条件时,即求多元函数的极值问题,一般模型为
()min 0
x R
f X X ∈⎧⎪⎨
≥⎪⎩ 此类问题即为无约束的非线性规划问题
1.1无约束非线性规划的解法 1.1.1一般迭代法
即为可行方向法。
对于问题()min 0x R
f X X ∈⎧⎪⎨
≥⎪⎩
给出)(x f 的极小点的初始值)0(X ,按某种规律计算出一系列的
),2,1()( =k X k ,希望点阵}{)(k X 的极限*X 就是)(x f 的一个极小点。
由一个解向量)
(k X
求出另一个新的解向量)1(+k X
向量是由方向和长度确定的,所以),2,1()1( =+=+k P X X k k k k λ
即求解k λ和k P ,选择k λ和k P 的原则是使目标函数在点阵上的值逐步减小,即
.)()()(10 ≥≥≥≥k X f X f X f
检验}{)(k X 是否收敛与最优解,及对于给定的精度0>ε,是否
ε≤∇+||)(||1k X f 。
1.1.2一维搜索法
当用迭代法求函数的极小点时,常常用到一维搜索,即沿某一已知方向求目标函数的极小点。
一维搜索的方法很多,常用的有:
(1)试探法(“成功—失败”,斐波那契法,0.618法等); (2)插值法(抛物线插值法,三次插值法等);
(3)微积分中的求根法(切线法,二分法等)。
考虑一维极小化问题
)(min t f b
t a ≤≤
若)(t f 是],[b a 区间上的下单峰函数,我们介绍通过不断地缩短],[b a 的长度,来搜索得)(min t f b
t a ≤≤的近似最优解的两个方法。
通过缩短区间],[b a ,逐步搜
索得)(min t f b
t a ≤≤的最优解*t 的近似值
2.1.3梯度法
选择一个使函数值下降速度最快的的方向。
把)(x f 在)
(k X
点的方向导数最小
的方向作为搜索方向,即令)(k
k
X f P -∇=.
计算步骤:
(1)选定初始点0X 和给定的要求0>ε,0=k ;
(2)若ε<∇||)(||k
X f ,则停止计算,k
X X =*,否则)()
(k k X f P
-∇=;
(3)在)
(k X
处沿方向)
(k P
做一维搜索得1,)
1(+=+=+k k P X X
k k k k 令λ,返
回第二步,直到求得最优解为止.可以求得:
.)()()()
()()
()()()()(k k T k k T k k X f X H X f X f X f ∇••∇∇•∇=λ ,))(,,)(,)(()()(2)(1)()
(T
n
k k k k x X f x X f x X f X
f ∂∂∂∂∂∂=∇
⎥⎥⎥⎥⎥⎥
⎥
⎥⎥⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡∂∂∂∂∂∂∂∂∂∂∂∂∂∂∂∂∂∂∂∂∂∂∂∂=n n k n k n k n k k k n k k k k x x X f x x X f x x X f x x X f x x X f x x X f x X f x X f x X f X H )(,,)(,)()(,,)(,)()(,,)(,)()()(2)(1)(2)
(22)(12)()(2)(1)()(
2.1.4共轭梯度法
2.1.5牛顿法 对于问题:
由,0)(=+=∇B AX X f 则由最优条件,0)(=∇X f 当A 为正定时,1
-A 存在,于是有
B A X 1*--=为最优解
2.1.6拟牛顿法
对于一般的二阶可微函数)(X f ,在)(k X 点的局部有
))(()(2
1
)()()()()()(2)()()()(k k T k k T k k X X X f X X X X X f X f X f -∇-+-∇+≈
当)()(2k X f ∇正定时,也可用上面的牛顿法,这就是拟牛顿法。
计算步骤:
(1)任取n E X ∈)1(,;1=k
(2)计算)()(k k X f g ∇=,若0=k g ,则停止计算,否则计算
)()()(2k k X f X H ∇=,令k k k k g X H X X 1)1())((-+-=;
(3)令1+=k k ;返回(2)
2有约束的非线性规划
2.1非线性规划的最优性条件
若*X 是非线性问题中的极小点,且对点*X 有效约束的梯度线性无
关,则必存在向量()****
12
,,,T
m γγγΓ=使下述条件成立:
()()()***1
**
*
00,1,2,,m 0,1,2,,m m
j j j j j j f X g X g X j j γγγ=⎧∇-∇=⎪
⎪⎪∇==⎨⎪≥=⎪⎪⎩
∑ 此条件为库恩-塔克条件(K-T 条件),满足K-T 条件的点也称为K-T
点。
K-T 条件是非线性规划最重要的理论基础,是确定某点是否为最优解的必要条件,但不一定是充要条件。
对于凸规划它一定是充要条件。
2.2非线性规划的可行方向法
由于线性规划的目标函数为线性函数,可行域为凸集,因而求出的最优解就是整个可行域上的全局最优解。
非线性规划却不然,有时求出的某个解虽是一部分可行域上的极值点,但并不一定是整个可行域上的全局最优解。
假设()k
X 非线性规划问题中的一个可行解,但不是最优解,为了进
一步寻找最优解在它的可行下降方向中选取其中一个方向()k
D ,并确定
最佳步长k λ,使得
()()()()()()
()
11,0,1,2,.k k k k k k X X D R k f X f X λ++⎧=+∈⎪
=⎨<⎪⎩
反复进行这一过程,直到得到满足精度要求为止,这种方法称为可
行方向法,也称迭代法。
2.3有约束非线性规划的解法 2.3.1外点法
(1)对于等式约束问题
⎩⎨
⎧==,,2,1,0)(),
(min m i x h X f i
做辅助函数
)()(),(121X h M X f M X P m
j j ∑=+=
如果最优解*X 满足或近似满足,),,2,1(0
)(*m j X h i ==则*X 就是问题的
最优解或近似解
(2)对于不等式约束问题 做辅助函数
∑=+=m
j j X g M X f M X P 122)}](,0[min{)(),(
求),(min 2M X P X
.
(3)对于一般问题 做辅助函数
)()(),(3X MP X f M X P +=
∑∑==+=m
j j m j j
X g M X h M X P 1
22
1
2)}](,0[min{|)(|)(
求解),(min 3M X P X
2.3.2内点法
内点法是在可行域内进行得,并一直保持在可行域内进行搜索,只适用于不等式约束的问题
辅助函数:
)()(),(X rB X f r X Q +=
X 趋于R 的边界时,使)(X B 趋向于正无穷,)(X B 的常用形式
∑∑
====m
j j m
j j X g X B X g X B 1
1)]([ln -)()
(1
)(和
求解},,2,1,0)(|{)
,(min 00
m j X g X R r X Q j R X =>=∈
算法
优点
缺点
梯度法
计算量小,存储变量较少,初始点要求不高
初值依赖,收敛慢,最速下降法
适用于寻优过程的前期迭代或作为间插步骤,越接近极值点时,收敛熟读越慢,后期宜选用收敛快的算法
牛顿法
收敛速度很快
当维数较高时,计算的工作量很大,初值依
赖,当初值选择不好时,有可能计算出现异常,导致迭代无法进行,该法
需要修正
拟牛顿法
收敛速度快,避免牛顿矩阵求逆运算,算法更稳定
初值依赖程度相对牛顿法减弱,
但仍然存在。