平面四杆机构的类型特点及应用概念
- 格式:docx
- 大小:36.51 KB
- 文档页数:2

平面铰链四杆机构分类1. 介绍平面铰链四杆机构是一种常见的机械结构,由四个杆件和若干个铰链连接而成。
它具有简单、可靠、可控性好等特点,在机械设计中得到广泛应用。
本文将对平面铰链四杆机构进行分类,并介绍每种分类的特点和应用。
2. 分类2.1 单自由度四杆机构单自由度四杆机构是指只有一个活动连接件(也称为驱动件)的四杆机构。
这种机构可以实现一个自由度的运动,常见的有曲柄滑块机构和双曲柄滑块机构。
2.1.1 曲柄滑块机构曲柄滑块机构由一个旋转的曲柄和一个直线运动的滑块组成。
通过改变曲柄的旋转角度,可以实现滑块的往复直线运动。
曲柄滑块机构广泛应用于发动机、压力机等领域。
2.1.2 双曲柄滑块机构双曲柄滑块机构是指两个曲柄与一个滑块组成的机构。
与曲柄滑块机构相比,双曲柄滑块机构可以实现更复杂的运动轨迹,具有更广泛的应用。
双曲柄滑块机构常用于绘图仪、印刷机等设备中。
2.2 多自由度四杆机构多自由度四杆机构是指有多个活动连接件(驱动件)的四杆机构。
这种机构可以实现多个自由度的运动,常见的有平行四杆机构和串联四杆机构。
2.2.1 平行四杆机构平行四杆机构是指由两个平行排列的驱动件和两个平行排列的从动件组成的机构。
它可以实现平面内任意点的直线运动,并且具有较高的精度和刚性。
平行四杆机构广泛应用于工业生产线上,用于传输、装配等工作。
2.2.2 串联四杆机构串联四杆机构是指由一个驱动件和三个从动件组成的机构。
它可以实现复杂的运动轨迹,并且具有较高的自由度。
串联四杆机构常用于医疗器械、机器人等领域,用于实现复杂的运动任务。
3. 应用3.1 工业生产线平面铰链四杆机构在工业生产线上广泛应用。
曲柄滑块机构常用于压力机、冲床等设备中,用于实现往复运动;平行四杆机构常用于传输线上,用于实现物料的输送和装配。
3.2 机器人平面铰链四杆机构在机器人领域也有着重要的应用。
串联四杆机构可以用于实现机器人的手臂运动,使其能够完成复杂的操作任务;双曲柄滑块机构可以被应用在机器人的关节传动中。
简述平面四杆机构的类型特点和应用一、平面四杆机构的类型:1. 平衡四杆机构:该机构有能力保持平衡,即使受到外部干扰也能够回到原来的位置。
这种机构被广泛用于稳定系统和开放环境。
2. 驱动四杆机构:该机构可以转化旋转运动为线性运动或反之。
这种机构广泛应用于机械工程、模具制造和自动化工程中。
3. 可逆四杆机构:该机构可以逆向工作,在不同的任务中灵活应用。
这种机构被广泛用于机器人工程和自动化工程中。
4. 变位四杆机构:该机构可以在不同位置自动调整,以适应不同的应用需求。
这种机构被广泛用于自动化机械和精密制造领域。
二、平面四杆机构的特点:1. 平面四杆机构可以转换不同类型的运动,包括旋转、线性、摆动等。
2. 平面四杆机构结构简单,易于制造和维护,具有良好的可靠性和稳定性。
3. 平面四杆机构可以通过组装多个单元来实现更高级别的机械结构,例如机器人、自动化系统等。
4. 平面四杆机构广泛应用于机械、汽车、制造、物流、自动化等领域,并逐渐成为机器人、智能装备的重要组成部分。
三、平面四杆机构的应用:1. 发动机连杆机构:由于发动机需要将旋转运动转化为线性运动来驱动汽车轮胎,平面四杆机构被广泛应用于汽车发动机的连杆机构中。
2. 物流设备:平面四杆机构可以逆向工作,可以将线性运动转化为旋转运动,这使得物流设备可以保持高速和精度,如自动包装线、调料机等。
3. 机械手:平面四杆机构的结构简单,稳定性好,这使得它成为机器人手臂的优选部件之一,广泛应用于各个制造领域。
4. 印刷机械:平衡四杆机构可以使印刷平台始终稳定,特别是在高速印刷时,它可以保持印刷品的精度和质量。
5. 飞控系统:平衡四杆机构被广泛应用于飞控系统的调节器中,以帮助控制飞行器的稳定性。
总的来说,平面四杆机构具有结构简单、稳定性好、运动特性多样等特点,可以在各个行业发挥重要的作用。


平面四杆机构的演化及应用姓名:高伟班级:环工0801学号:200829090119基本概念(1)平面连杆机构定义:由若干构件通过低副(铰链或滑道)连接而成的机构。
因构件形状多呈杆状,所以称连杆机构,各构件间的相对运动均在同一平面或平行平面内运动的连杆机构称为平面连杆机构。
(2)平面连杆机构的特点:1.能够进行多种运动形式的转换;2.构件之间的运动副一般为滴副,低副两元素为面接触,单位面积上的压力较小,磨损较慢,可以承受较大载荷;3.两构件接触表面是圆柱面或平面,制造容易;4.运动副磨损后的间隙无法自动补偿,容易积累误差,运动中的惯性力难以平衡,不适用于高速场合;5.不易精确的实现复杂的运动规律。
(4)平面连杆机构的应用:三构件用转动副联接起来,不能成为机构。
故含转动副的平面连杆机构至少由四杆组成。
全部是转动副联接而组成的平面四杆机构称为全铰链四杆机构,连杆机构中的构件常称为杆。
工程中应用最广泛的是平面四连杆机构。
许多平面多杆机构均是在此基础上,通过添加一些杆件系统而构成。
各种机器和仪器中,例如金属加工机床、起重运输机械、采矿机械、农业机械、交通运输机械和仪表等。
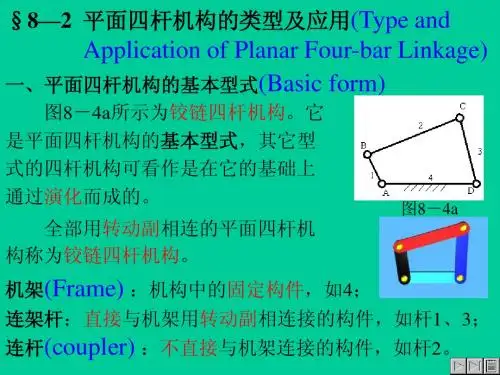
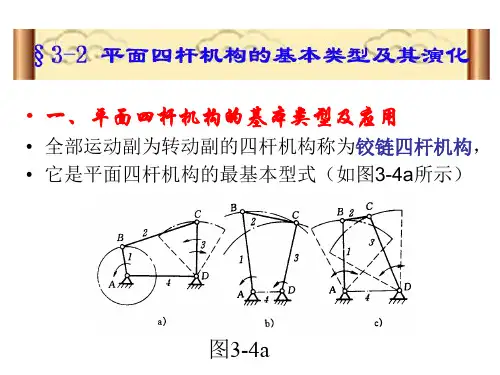
二、四杆机构的基本型式及演化平面四杆机构的基本型式是铰链四杆机构。
其它型式的四杆机构都可看成是在它的基础上通过演化而成的。
由四个构件用铰链连接而成的机构称为铰链四杆机构。
如图所示,机构中固定不动的构件AD称为机架,与机架相连的构件AB和CD称为连架杆。
如果连架杆能绕轴线作360o的回转运动,称为曲柄;若只能在某一角度(小于360°)内摆动,称为摇杆。
与机架不相连接的构件BC称为连杆。
铰链四杆机构可按有无曲柄、摇杆,分为以下三种基本型式。
1、曲柄摇杆机构定义:在铰链四杆机构中,若两连架杆之一为曲柄,另一个是摇杆,此机构称为曲柄摇杆机构。
应用:在曲柄摇杆机构中,当曲柄为主动件时,可将曲柄的连续回转运动转换成摇杆的往复摆动。
如雷达天线俯仰角调整机构。
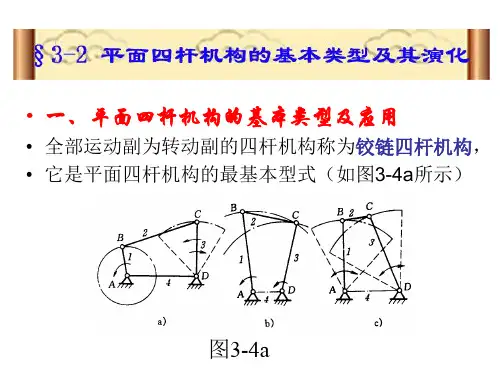
平面四杆机构的三种基本类型1. 引言平面四杆机构是一种常见的机械结构,由四根连杆组成,在平面内相互连接。
它具有简单、稳定、可靠的特点,在工程设计中广泛应用。
本文将介绍平面四杆机构的三种基本类型,包括连杆型、曲杆型和双曲杆型。
通过对这三种类型的详细介绍,我们可以更好地理解平面四杆机构的原理和应用。
2. 连杆型平面四杆机构连杆型平面四杆机构是最简单的一种类型,由四根等长连杆组成,每根连杆的两端通过铰链连接。
这种机构的特点是连杆的长度及相对位置不变,使得机构保持稳定的平面形状。
连杆型机构的基本结构示意图如下:该机构的机构运动学可以用迎角法进行分析,在给定一根连杆的运动状态时,可以由其他连杆的角度相互计算得出。
该机构的运动特点是存在一个固定点,该点使得机构保持平衡。
连杆型机构广泛应用于各种机械装置中,如拖拉机的传动机构、升降机构等。
3. 曲杆型平面四杆机构曲杆型平面四杆机构是基于曲轴概念发展起来的,其连杆的长度和相对位置随着机构的运动而发生变化。
曲杆型机构的基本结构示意图如下:曲杆型机构的运动学分析相对复杂,需要考虑连杆长度的变化对机构运动的影响。
由于连杆的长度和连接方式的变化,曲杆型机构可以实现更灵活的运动形式,如转动、滑动等。
这使得曲杆型机构在某些特定的应用场合中具有独特的优势,比如操纵机构、自动控制装置等。
4. 双曲杆型平面四杆机构双曲杆型平面四杆机构是连杆型和曲杆型的结合体,它由两根连杆和两段曲杆组成。
双曲杆型机构的基本结构示意图如下:双曲杆型机构的运动学分析更加复杂,需要考虑连杆长度和曲杆长度的变化对机构运动的影响。
由于连杆和曲杆的优势结合,双曲杆型机构可以实现更多种类的运动形式,如旋转、平移、摆动等。
这使得双曲杆型机构在一些精密机械装置中得到广泛应用,如机械手臂、模具装置等。
5. 比较与应用三种基本类型的平面四杆机构在结构和运动学分析上存在一些共同点和不同点。
连杆型机构结构简单,运动学分析较为容易;曲杆型机构结构复杂,运动学分析相对困难;双曲杆型机构结合了连杆和曲杆的优势,运动形式更丰富。
平面铰链四杆机构分类一、引言平面铰链四杆机构是一种常见的机械传动结构,由四个杆件通过铰链连接而成。
它具有简单、可靠、刚性好等优点,在机械领域有着广泛的应用。
本文将对平面铰链四杆机构进行分类和分析,以期更好地了解和应用这一机构。
二、分类平面铰链四杆机构可以根据其杆件的链接关系和机构的运动方式进行分类。
2.1 根据杆件链接关系分类•对称四杆机构:四个杆件两两对称连接,形成一个对称的结构。
常见的具有对称结构的平面铰链四杆机构有平行四杆机构和梯形四杆机构。
•非对称四杆机构:四个杆件之间没有对称关系,形成一个非对称的结构。
常见的非对称平面铰链四杆机构有双曲线四杆机构和椭圆四杆机构。
2.2 根据机构的运动方式分类•旋转运动四杆机构:机构中至少有一个连杆可以绕铰链进行旋转运动。
例如,摇杆机构和滑块机构都属于旋转运动四杆机构。
•平动运动四杆机构:杆件只能以平动的方式运动,不能绕铰链进行旋转运动。
典型的平动运动四杆机构有单滑块机构和双滑块机构。
三、对称四杆机构3.1 平行四杆机构四杆机构中的两个杆件平行于彼此,并且与另外两个杆件相互垂直。
平行四杆机构有两组平行链接的杆件,因此具有对称的结构。
其机构特点是:•杆件a和b平行,杆件c和d平行;•杆件a和d通过铰链连接,形成了机构的链接框架;•杆件b和c通过其他的铰链连接。
3.2 梯形四杆机构四杆机构中的两个杆件不平行,而是呈现出梯形的形状。
梯形四杆机构同样具有对称结构,其机构特点是:•杆件a和b不平行,杆件c和d不平行;•杆件a和d通过铰链连接,形成了机构的链接框架;•杆件b和c通过其他的铰链连接。
四、非对称四杆机构4.1 双曲线四杆机构四杆机构中的杆件连接形成一个双曲线的形状,因此称为双曲线四杆机构。
其机构特点是:•杆件a和b彼此相交,杆件c和d彼此相交;•杆件a和d通过铰链连接,形成了机构的链接框架;•杆件b和c通过其他的铰链连接。
4.2 椭圆四杆机构四杆机构中的杆件连接形成一个椭圆的形状,因此称为椭圆四杆机构。
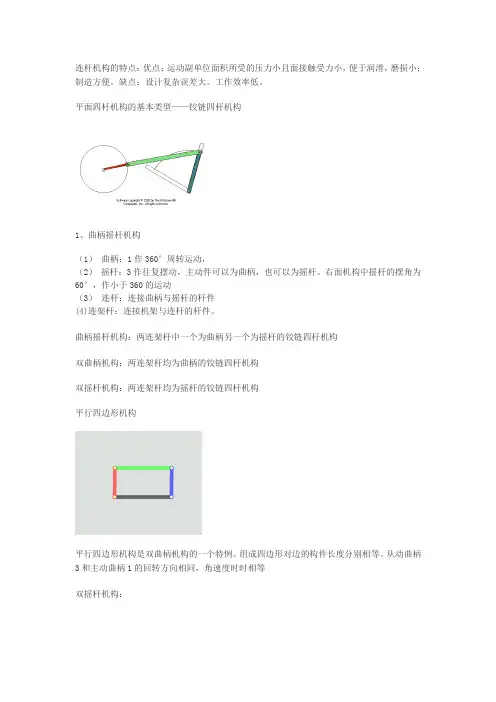
连杆机构的特点:优点:运动副单位面积所受的压力小且面接触受力小,便于润滑,磨损小;制造方便。
缺点:设计复杂误差大。
工作效率低。
平面四杆机构的基本类型——铰链四杆机构1、曲柄摇杆机构(1)曲柄:1作360°周转运动,(2)摇杆:3作往复摆动,主动件可以为曲柄,也可以为摇杆。
右面机构中摇杆的摆角为60°,作小于360的运动(3)连杆:连接曲柄与摇杆的杆件(4)连架杆:连接机架与连杆的杆件。
曲柄摇杆机构:两连架杆中一个为曲柄另一个为摇杆的铰链四杆机构双曲柄机构:两连架杆均为曲柄的铰链四杆机构双摇杆机构:两连架杆均为摇杆的铰链四杆机构平行四边形机构平行四边形机构是双曲柄机构的一个特例。
组成四边形对边的构件长度分别相等。
从动曲柄3和主动曲柄1的回转方向相同,角速度时时相等双摇杆机构:构件1和3都作往复摆动,一般主动摇杆作等速摆动,从动摇杆作变速摆动。
平面四杆机构的演化形式(Ⅰ)——含一个移动副的四杆机构曲柄滑块机构正置曲柄滑块机构滑块(slider)铰链点的运动方位线通过曲柄转动中心,滑块动程(pitch)等于两倍曲柄1的长度,无急回运动特性。
主动件可以为曲柄,也可以为滑块。
偏置曲柄滑块机构滑块铰链点的运动方位线不通过曲柄转动中心,偏距(offset)为e,滑块动程大于两倍曲柄长度,有急回运动特性导杆机构转动导杆机构曲柄1和导杆3都能作360°周转运动,主动曲柄作等速转动,从动导杆作变速转动,摆动导杆机构曲柄1作360°周转运动,摆动导杆3作往复摆动,且有较大的急回运动特性曲柄摇块机构移动导杆机构构件2作往复摆动,构件4在滑块中作往复移动。
2 平面连杆机构的工作特性1、转动副为整转副的充分必要条件急回运动和行程速比系数原动曲柄转动一周过程中,有两次与连杆共线,即重叠共线和拉直共线,摇杆两个极限位置分别为C1D和C2D。
曲柄AB以等角速度ω顺时针转过α1角由位置AB1转到位置AB2,摇杆从C1D摆到C2D,摆角为φ,所需时间为t1,C点平均速度为V1。
平面四杆机构的基本类型及应用
平面四杆机构是机械设计中常用的连杆机构之一,由于其简单可靠和使用方便,广泛应用于各种机械设备中。
平面四杆机构是由四个链杆组成的,其中至少有一个链杆是固定的。
四个链杆的联接点构成了四个运动副,包括一对转动副和一对平动副,它们通过固定的连杆来互相联系。
平面四杆机构可以实现转动或直线运动,同时可实现正、反、重复运动。
本文将主要介绍平面四杆机构的基本类型及应用。
1. 凸轮机构型平面四杆机构
凸轮机构型平面四杆机构是一种基于凸轮的平面四杆机构,由于其能够产生不同形状的凸轮运动来实现转动或直线运动,因此在机械设备中广泛应用。
例如,凸轮式压力机、凸轮式磨床、凸轮式切削机和凸轮式卷板机等机器均采用了凸轮机构型平面四杆机构。
双曲线机构型平面四杆机构是一种基于双曲线运动的平面四杆机构,由于其具有双曲线重复运动的性质,因此在多运动副平面机构中应用较为广泛。
例如,位移量较小的曲柄滑块机构,就采用了这种结构。
此外,双曲线机构型平面四杆机构还被广泛应用于推动旋转工件的机械系统中。
心轮机构型平面四杆机构是一种基于心轮的平面四杆机构,其构造相比其他机构稍微复杂,但具有较高的可靠性和灵敏度,因此被广泛应用于重要的机械装置中。
例如,用于驱动自动调焦装置、扫描仪输送装置、医院电梯系统等机器的传动装置均采用了心轮机构型平面四杆机构。
总之,平面四杆机构广泛应用于机械设计中的各个领域,包括制造业、食品加工、印刷、医疗和各种运动设备等。
不同类型的平面四杆机构各具特点,可根据使用情况和需要选择。
平面四杆机构的类型,特点及应用概念平面四杆机构是一种重要的机械构件,具有固定点簇、连杆及活动点簇等关键组成部分。
根据不同的连接方式和功能需求,平面四杆机构可以分为平行四杆机构、菱形四杆机构、双曲线四杆机构、半圆四杆机构等多种类型。
下面本文将对这些机构类型的特点及应用进行相关介绍。
一、平行四杆机构平面四杆机构中的平行四杆机构,最为常见。
平行四杆机构由两对等长连杆组成,各自平行滑动,所以叫做平行四杆机构。
平行四杆机构的特点是连接点严格固定,适合转动相同方向的连续运动,如车床上的顶轴和平面磨床的进给机构就采用了平行四杆机构。
二、菱形四杆机构菱形四杆机构是由一对等长的对边固定的菱形和一对等长杆件组成的机构。
其中,两个杆件与菱形的对角线相连,另外两个杆件则与菱形两条平行线相连。
通过这样的联结方式,菱形四杆机构可以实现不同方向的运动,如旋钮开关,废乳机械的减速机构等都采用了菱形四杆机构。
三、双曲线四杆机构双曲线四杆机构是由双曲面、两个相交的固定点、两个关节和两个等长杆组成的平面四杆机构,主要是用来实现一定的负载传递和动力,例如工件阻力和重力等。
双曲线四杆机构的优点在于具有一定的自适应能力,可以自动调整杆长度,达到更稳定的运动效果。
应用领域包括夹持,钻床等。
四、半圆四杆机构半圆四杆机构是由两条半圆弧及两对连杆构成的平面四杆机构。
通过调整连接点的位置及杆长度,可以实现转轴轨迹的变化。
半圆四杆机构在工业生产中被广泛应用,如水平挖掘机,转子泵等。
在应用平面四杆机构的过程中,大多数机构的运动往往还需要与其它机构进行配合才能实现更复杂多变的功能。
此外在机器人领域中,四杆机构也得到了广泛应用,如各类机器人的手臂,就是利用四杆机构的特性来完成精细灵活的动作。
总的来说,平面四杆机构是机械领域中一类非常基础且重要的构件。
通过不同的连接方式和调整,可以实现多样化的运动功能,并被广泛应用在工业生产及机器人领域中。
机械设计中的平面四杆机构设计机械设计中的平面四杆机构设计是一项关键的技术,它对于机械设备的运动性能和工作效率具有重要影响。
在本文中,我们将探讨平面四杆机构的设计原理和方法,并重点讨论几种常见的平面四杆机构设计。
1. 平面四杆机构的基本原理平面四杆机构是由四个杆件和四个转动副组成的机械系统。
其中,两个杆件为连杆,两个杆件为曲柄。
通过合理的连接和安排,平面四杆机构可以实现特定的运动轨迹和工作功能。
平面四杆机构通常具有四个连杆长度、四个连杆转动角度和四个面间夹角等参数,这些参数的选择和设计将直接影响机构的性能。
2. 平面四杆机构的设计方法在平面四杆机构的设计过程中,需要注意以下几个关键要素:2.1 机构类型选择根据具体的工作需求和运动特点,选择合适的平面四杆机构类型。
常见的类型包括双曲柄四杆机构、双滑块四杆机构和连杆滑块四杆机构等。
每种类型的机构都有其特点和适用范围,设计者需要根据具体情况做出选择。
2.2 运动轨迹设计平面四杆机构的设计目标之一是确定所需的运动轨迹。
通过合理设置连杆长度和转动角度等参数,设计者可以使机构实现所需的直线运动、往复运动或者特定的曲线轨迹等。
2.3 运动性能评估在设计过程中,需要对平面四杆机构的运动性能进行评估。
常见的评估指标包括机构速度、加速度、运动稳定性和工作效率等。
通过使用运动分析软件或者手工计算,可以得到机构的具体性能参数。
3. 常见的平面四杆机构设计在实际应用中,有几种常见的平面四杆机构设计。
3.1 双曲柄四杆机构双曲柄四杆机构由两个曲柄和两个连杆组成,具有简单的结构和稳定的运动特性。
它常用于需要往复运动的机械设备中,例如活塞式发动机。
3.2 双滑块四杆机构双滑块四杆机构包含两个滑块和两个连杆,可实现两个滑块的相对运动。
这种结构常用于需要同时进行两个工作操作的装置,比如双手操作的印刷机械。
3.3 连杆滑块四杆机构连杆滑块四杆机构是由两个连杆和两个滑块组成,其中一个滑块在连杆上滑动。
平面四杆机构的类型特点及应用概念平行四杆机构的特点是固定杆和活动杆平行且相等长度,其中两个固定连接点和两个活动连接点分别位于固定杆的两端和活动杆的两端。
它的运动可以实现平行移动,适用于汽车悬挂系统、工艺机械等领域。
正交四杆机构的特点是固定杆和活动杆相交且相等长度,其中两个固定连接点和两个活动连接点分别位于固定杆的两端和活动杆的两端。
它的运动可以实现直线运动,适用于推动机械、绞车等领域。
菱形四杆机构的特点是固定杆和活动杆两两相交且相等长度,其中两个固定连接点和两个活动连接点分别位于固定杆的两端和活动杆的两端。
它的运动可以实现平行移动和旋转运动,适用于啮合机构、制造机械等领域。
推动机构的特点是固定杆和活动杆两两平行且相等长度,其中两个固定连接点和两个活动连接点分别位于固定杆的两端和活动杆的两端。
它的运动可以实现直线运动,适用于传动机构、物料输送机械等领域。
平面四杆机构的应用非常广泛。
它可以用于制造机械、工艺机械、汽车悬挂系统、绞车、传动机构、物料输送机械等领域。
在制造机械中,平面四杆机构常用于构建精密机床,如铣床、钻床等。
在工艺机械中,平面四杆机构常用于构建织机、纺机等。
在汽车悬挂系统中,平面四杆机构可以实现汽车悬挂系统的运动,提高汽车悬挂性能。
在绞车中,平面四杆机构可以用于提升和绞丝等工作。
在传动机构中,平面四杆机构可以用于实现直线传动和转动传动。
在物料输送机械中,平面四杆机构可以用于实现物料的输送和分拨。
总之,平面四杆机构具有多种类型和特点,适用于多个领域的应用。
它可以实现复杂的运动轨迹,广泛应用于制造机械、工艺机械、汽车悬挂系统、绞车、传动机构、物料输送机械等领域。