平面四杆机构
- 格式:ppt
- 大小:11.86 MB
- 文档页数:38

平面四杆机构的类型特点及应用概念平行四杆机构的特点是固定杆和活动杆平行且相等长度,其中两个固定连接点和两个活动连接点分别位于固定杆的两端和活动杆的两端。
它的运动可以实现平行移动,适用于汽车悬挂系统、工艺机械等领域。
正交四杆机构的特点是固定杆和活动杆相交且相等长度,其中两个固定连接点和两个活动连接点分别位于固定杆的两端和活动杆的两端。
它的运动可以实现直线运动,适用于推动机械、绞车等领域。
菱形四杆机构的特点是固定杆和活动杆两两相交且相等长度,其中两个固定连接点和两个活动连接点分别位于固定杆的两端和活动杆的两端。
它的运动可以实现平行移动和旋转运动,适用于啮合机构、制造机械等领域。
推动机构的特点是固定杆和活动杆两两平行且相等长度,其中两个固定连接点和两个活动连接点分别位于固定杆的两端和活动杆的两端。
它的运动可以实现直线运动,适用于传动机构、物料输送机械等领域。
平面四杆机构的应用非常广泛。
它可以用于制造机械、工艺机械、汽车悬挂系统、绞车、传动机构、物料输送机械等领域。
在制造机械中,平面四杆机构常用于构建精密机床,如铣床、钻床等。
在工艺机械中,平面四杆机构常用于构建织机、纺机等。
在汽车悬挂系统中,平面四杆机构可以实现汽车悬挂系统的运动,提高汽车悬挂性能。
在绞车中,平面四杆机构可以用于提升和绞丝等工作。
在传动机构中,平面四杆机构可以用于实现直线传动和转动传动。
在物料输送机械中,平面四杆机构可以用于实现物料的输送和分拨。
总之,平面四杆机构具有多种类型和特点,适用于多个领域的应用。
它可以实现复杂的运动轨迹,广泛应用于制造机械、工艺机械、汽车悬挂系统、绞车、传动机构、物料输送机械等领域。
平面四杆机构的三种基本类型
1.平面四杆机构的基本类型
平面四杆机构是机械驱动系统中的一种常见结构,相对于其他机构而言,它具有简单结构,容易制造、安装和维护等特点,可以满足不同的机械驱动需求。
平面四杆机构可以分为三大类:摆动运动的活动类四杆机构、运动类四杆机构以及悬臂类四杆机构。
(1)摆动运动的活动类四杆机构
摆动运动的活动类四杆机构是一种典型的四杆机构,它具有一个主动类似于摆动运动的活动部件,一个棍杆组成,它一端连接固定在机械设备上的活动部件,另一端连接执行器,它可以通过输入信号来控制四杆机构的运动方向和速度。
(2)运动类四杆机构
运动类四杆机构是一种典型的四杆机构,它由一个主杆、两个连接杆、一个活动杆和一个联动机构组成,它可以实现前后、左右运动,可以通过改变运动方向和速度,来达到控制任务的目的。
(3)悬臂类四杆机构
悬臂类四杆机构是一种新型的四杆机构,它的结构类似悬臂梁,由一个主杆、两个连接杆、一个支点和一个活动杆组成,它可以实现前后、左右悬臂运动,可以通过改变运动方向和速度,来达到控制任务的目的。
- 1 -。


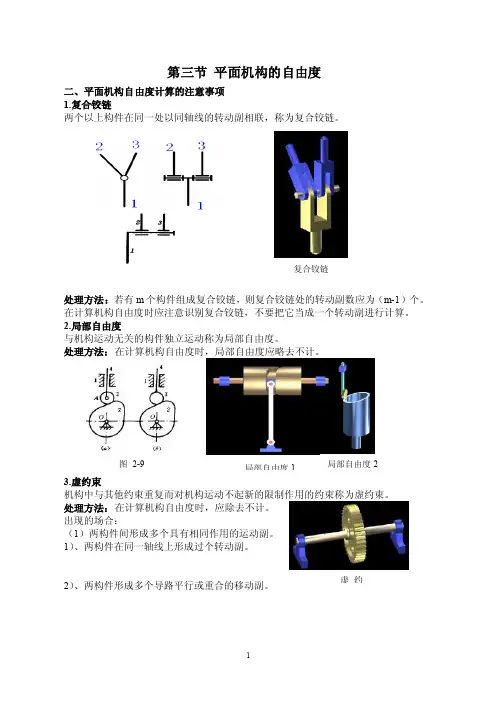
第三节 平面机构的自由度二、平面机构自由度计算的注意事项1.复合铰链两个以上构件在同一处以同轴线的转动副相联,称为复合铰链。
处理方法:若有m 个构件组成复合铰链,则复合铰链处的转动副数应为(m-1)个。
在计算机构自由度时应注意识别复合铰链,不要把它当成一个转动副进行计算。
2.局部自由度与机构运动无关的构件独立运动称为局部自由度。
处理方法:在计算机构自由度时,局部自由度应略去不计。
3.虚约束机构中与其他约束重复而对机构运动不起新的限制作用的约束称为虚约束。
处理方法:在计算机构自由度时,应除去不计。
出现的场合:(1)两构件间形成多个具有相同作用的运动副。
1)、两构件在同一轴线上形成过个转动副。
2)、两构件形成多个导路平行或重合的移动副。
3)、两构件组成多处接触点公法线重合的高副。
(2)两构件上联接点运动轨迹相互重合。
(3)机构中具有对运动不起作用的对称部分。
三、 机构具有确定运动的条件机构的自由度即是平面机构所能有的独立运动的数目。
当机构自由度大于零,机构才能运动,只有给机构输入的独立运动数目与机构自由度相等,该机构才能有确定的运动。
机构具有确定运动的条件:机构的原动件数目W 等于机构的自由度数F ,即:W=F ≠0第三章 平面连杆机构第一节 概述平面连杆机构:由若干个构件通过低副联接而成的机构,又称为平面低副机构。
低副机构运动具有可逆性,即不管以哪个构件为机架,以哪些构件做为原动件,各构件的相对运动规律是不变的.平面连杆机构的优点:b(1)由于低副为面接触,故传力时压强小、磨损少,且易于加工和保证较高的制造精度;(2)能方便地实现转动、摆动和移动等基本运动形式及其相互转换;(3)能实现多种运动轨迹和运动规律,以满足不同的工作要求。
平面连杆机构的缺点:(1)由于低副中存在着间隙,机构将会产生运动误差,不能准确地实现工作机构的运动要求;(2)不易实现精确的复杂运动。
第二节四杆机构的基本形式及其演化平面四杆机构分类:铰链四杆机构(基本形式)、滑块四杆机构(演化形式)一、平面四杆机构的基本形式铰链四杆机构:构件间都是转动副的平面四杆机构。
平面四杆机构的类型,特点及应用概念平面四杆机构是一种重要的机械构件,具有固定点簇、连杆及活动点簇等关键组成部分。
根据不同的连接方式和功能需求,平面四杆机构可以分为平行四杆机构、菱形四杆机构、双曲线四杆机构、半圆四杆机构等多种类型。
下面本文将对这些机构类型的特点及应用进行相关介绍。
一、平行四杆机构平面四杆机构中的平行四杆机构,最为常见。
平行四杆机构由两对等长连杆组成,各自平行滑动,所以叫做平行四杆机构。
平行四杆机构的特点是连接点严格固定,适合转动相同方向的连续运动,如车床上的顶轴和平面磨床的进给机构就采用了平行四杆机构。
二、菱形四杆机构菱形四杆机构是由一对等长的对边固定的菱形和一对等长杆件组成的机构。
其中,两个杆件与菱形的对角线相连,另外两个杆件则与菱形两条平行线相连。
通过这样的联结方式,菱形四杆机构可以实现不同方向的运动,如旋钮开关,废乳机械的减速机构等都采用了菱形四杆机构。
三、双曲线四杆机构双曲线四杆机构是由双曲面、两个相交的固定点、两个关节和两个等长杆组成的平面四杆机构,主要是用来实现一定的负载传递和动力,例如工件阻力和重力等。
双曲线四杆机构的优点在于具有一定的自适应能力,可以自动调整杆长度,达到更稳定的运动效果。
应用领域包括夹持,钻床等。
四、半圆四杆机构半圆四杆机构是由两条半圆弧及两对连杆构成的平面四杆机构。
通过调整连接点的位置及杆长度,可以实现转轴轨迹的变化。
半圆四杆机构在工业生产中被广泛应用,如水平挖掘机,转子泵等。
在应用平面四杆机构的过程中,大多数机构的运动往往还需要与其它机构进行配合才能实现更复杂多变的功能。
此外在机器人领域中,四杆机构也得到了广泛应用,如各类机器人的手臂,就是利用四杆机构的特性来完成精细灵活的动作。
总的来说,平面四杆机构是机械领域中一类非常基础且重要的构件。
通过不同的连接方式和调整,可以实现多样化的运动功能,并被广泛应用在工业生产及机器人领域中。