K3.06-离散系统状态方程的建立
- 格式:pdf
- 大小:173.91 KB
- 文档页数:8


2326.4 离散系统的数学模型为研究离散系统的性能,需要建立离散系统的数学模型。
线性离散系统的数学模型有差分方程、脉冲传递函数和离散状态空间表达式三种。
本节主要介绍差分方程及其解法,脉冲传递函数的定义,以及求开环脉冲传递函数和闭环脉冲传递函数的方法。
有关离散状态空表达式及其求解,将在第8章介绍。
6.4.1 线性常系数差分方程及其解法对于线性定常离散系统,k 时刻的输出)(k c ,不但与k 时刻的输入)(k r 有关,而且与k 时刻以前的输入 ),2(),1(--k r k r 有关,同时还与k 时刻以前的输出 ),2(),1(--k c k c 有关。
这种关系一般可以用n 阶后向差分方程来描述,即∑∑==-+--=mj jni i j k r bi k c a k c 01)()()( (6-34)式中,i a ,i =1,2,…,n 和j b ,j =0,1,…,m 为常系数,n m ≤。
式(6-34)称为n 阶线性常系数差分方程。
线性定常离散系统也可以用n 阶前向差分方程来描述,即∑∑==-++-+-=+mj jni i j m k r bi n k c a n k c 01)()()( (6-35)工程上求解常系数差分方程通常采用迭代法和z 变换法。
1. 迭代法若已知差分方程式(6-34)或式(6-35),并且给定输出序列的初值,则可以利用递推关系,在计算机上通过迭代一步一步地算出输出序列。
例6-10 已知二阶差分方程)2(6)1(5)()(---+=k c k c k r k c输入序列1)(=k r ,初始条件为1)1(,0)0(==c c ,试用迭代法求输出序列)(k c , ,5,4,3,2,1,0=k 。
解 根据初始条件及递推关系,得0)0(=c 1)1(=c6)0(6)1(5)2()2(=-+=c c r c 25)1(6)2(5)3()3(=-+=c c r c 90)2(6)3(5)4()4(=-+=c c r c301)3(6)4(5)5()5(=-+=c c r c2. z 变换法233设差分方程如式(6-34)所示,对差分方程两端取z 变换,并利用z 变换的实数位移定理,得到以z 为变量的代数方程,然后对代数方程的解)(z C 取z 反变换,可求得输出序列)(k c 。
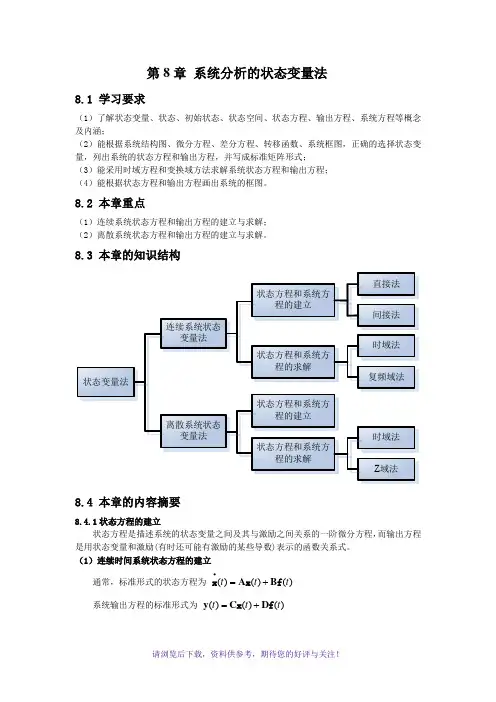
第8章 系统分析的状态变量法8.1 学习要求(1)了解状态变量、状态、初始状态、状态空间、状态方程、输出方程、系统方程等概念及内涵;(2)能根据系统结构图、微分方程、差分方程、转移函数、系统框图,正确的选择状态变量,列出系统的状态方程和输出方程,并写成标准矩阵形式;(3)能采用时域方程和变换域方法求解系统状态方程和输出方程; (4)能根据状态方程和输出方程画出系统的框图。
8.2 本章重点(1)连续系统状态方程和输出方程的建立与求解;8.4 本章的内容摘要8.4.1状态方程的建立状态方程是描述系统的状态变量之间及其与激励之间关系的一阶微分方程,而输出方程是用状态变量和激励(有时还可能有激励的某些导数)表示的函数关系式。
(1)连续时间系统状态方程的建立通常,标准形式的状态方程为 )()()(t t t f x x B A +=•系统输出方程的标准形式为 )()()(t t t f x D C y +=式中)(t •x 表示状态变量的一阶导数,)(t f 是与外加信号有关的项,A 、B 、C 和D 为常数矩阵。
直接法:利用系统实际结构及系统所遵循的物理规律直接列出方程的方法。
间接法:根据已知的输入输出方程、系统框图或系统函数列写状态方程的方法。
(2)离散时间系统状态方程的建立对于一个有p 个输入和q 个输出的离散系统,如有k 个状态变量,其状态方程的一般形式为⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+++)()()()()()()1()1()1(212122221112112121222211121121n f n f n f b b b b b b b b b n x n x n x a a a a a a a a a n x n x n x p kp k k p p k kk k k k k k输出方程的一般形式为⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡)()()()()()()()()(212122221112112121222211121121n f n f n f d d d d d d d d d n x n x n x c c c c c c c c c n y n y n y p qp q q p p k qk q q k k q可简写为)()()1(n n n f x x B A +=+ )()()n n n f x D C y(+=式中C B A 、、和D 是常数矩阵。
教学模块6 基于状态空间模型的极点配置设计方法教学单元2 离散系统状态空间函数模型的建立离散系统状态空间模型差分方程连续系统状态空间模型脉冲传递函数建立被控对象离散状态空间模型的方法:•由连续系统状态空间模型求取•由差分方程求取•由脉冲传递函数求取2.1 由连续状态空间模型建立离散状态空间模型()()()()()t A t B t t C t =+⎧⎨=⎩x x u y x (1)设连续控制对象的模型可用如下的状态空间表达式描述:其中设x 为n 维状态向量,u 为m 维控制向量,y 为r 维输出向量。
设在连续的对象前面有零阶保持器,即()() (1)t k kT t k T=≤<+u u (2)将控制对象与保持器一起进行离散化处理,得到离散系统模型。
对式(1)求解:()()()t A t B t -=xx u 两边同乘,得到Ate-(()())()AtAtet A t e B t ---=x x u 由于(()())[()]At Atd e t A t e t dt---=x x x 于是[()]()AtAt d e t e B t dt--=x u 两边积分,有:00[()]()tt A A t t d e d e B d d τττττττ--=⎰⎰x u 其中00000[()] [()]() ()()tt t A A A t t t At At d e d d e e d e t e t ττττττττ-----===-⎰⎰x x x x x (a)(c)因此,有:0()()()tAt AtA t et et eB d τττ---=+⎰x x u 两边同乘,有:00()()0()()()tA t t A t t t et eB d τττ--=+⎰x x u Ate (3)令,由(2)式,即考虑零阶保持器,得T k t kT t )1( ,0+==(1)()(1)()()k TATA kT T kTk e k e d B k ττ++-⎡⎤+=+⎢⎥⎣⎦⎰x x u (4)()() (1)t k kT t k T=≤<+u u令,(4)式化为:(1)()()k F k G k +=+x x u (5)τ-+=T kT t 其中⎰==TAt ATdtBe G eF 0,(6)式(1)中,输出方程的离散形式为:()()k C k =y x (7)故连续模型等效离散状态空间表达式为:(1)()()()()k F k G k k C k +=+⎧⎨=⎩x x u y x (8)矩阵指数及其积分的计算⎰==TAtATdtBe G e F 0,拉氏变换法可以证明:11()At e L sI A --=-因此,求F 、G 的步骤如下:(1)求得的逆矩阵(2)取其拉氏反变换,获得(3)求F 和G)(A sI -1)(--A sI Ate (9)(10)幂级数计算法At e 的幂指数形式为!3!23322 ++++=t A t A At I eAt令!4!3!243322++++==⎰TA T A AT IT dt e H TAt(11)(12)于是22332232!3! 2!3! ATTAtA T A TF e I AT AT A TI A IT I A e dt I AH==++++⎛⎫=++++ ⎪⎝⎭=+=+⎰()0TAt G e dt B HB==⎰(13)(14)!4!3!243322++++==⎰T A T A AT IT dt e H TAt例2.1设连续系统的状态空间模型为求其离散化状态空间模型。
状态方程离散化方法状态方程离散化是个挺有趣的事儿呢。
那什么是状态方程离散化呀?简单来说,就像是把一个连续的故事按照一页一页的方式记录下来。
在连续的状态方程里,变量是随时间连续变化的,就像水流一样不间断。
而离散化呢,就是把这个连续的过程切成一小段一小段的,就像把一长条面包切成一片片的。
常见的离散化方法有好几种哦。
比如说欧拉法,这个方法就像是一个很老实的小伙伴,它是用一种比较简单直接的方式去近似。
就好比你要估算从家到学校的路程,你就简单地按照当前的速度一直走,不考虑路上速度可能会有小变化。
这种方法简单,但是有时候不是特别精确啦。
还有龙格 - 库塔法,这个就像是一个聪明的小机灵鬼。
它会多考虑几步,不只是看当前的状态,还会看看周围的情况来调整。
就像你去学校,你不仅看现在的速度,还会考虑到前面是不是有个小坡会减慢速度,或者有没有什么捷径可以加快速度。
这种方法就比欧拉法要精确一些。
离散化状态方程在很多地方都超级有用哦。
在计算机模拟里,计算机可不能处理那种连续不断的变化,就像电脑不能理解水流到底是怎么连续流动的每一个瞬间。
但是我们把状态方程离散化之后呢,电脑就能明白啦,就像给电脑讲了一个它能听懂的故事。
在控制工程里也很有用,就像是给控制系统制定了一个一个小目标,让系统一步一步地达到我们想要的状态。
不过离散化也不是完美无缺的啦。
有时候切得太粗糙了,就像面包片切得太厚,得到的结果就会和实际情况差很多。
所以要根据具体的情况去选择合适的离散化方法,就像挑选合适的鞋子一样,要找到最适合的那个。
总之呢,状态方程离散化是一个很实用又很有意思的东西,它就像一把神奇的小钥匙,能打开很多科学和工程领域的大门呢。