电流调节器设计举例
- 格式:doc
- 大小:43.50 KB
- 文档页数:5
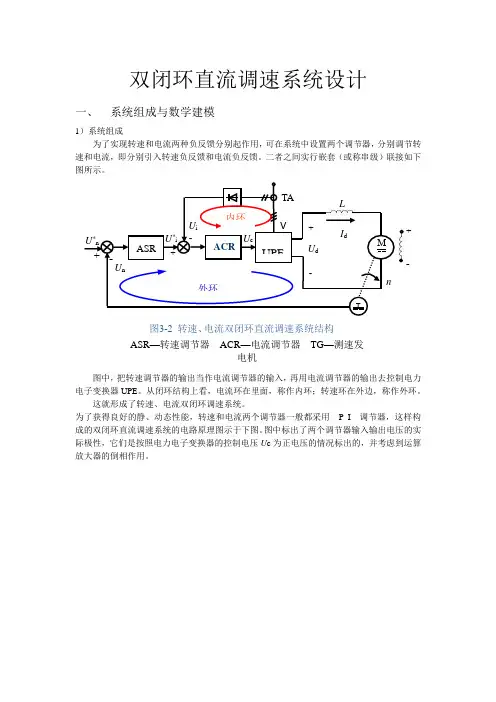
双闭环直流调速系统设计一、系统组成与数学建模1)系统组成为了实现转速和电流两种负反馈分别起作用,可在系统中设置两个调节器,分别调节转速和电流,即分别引入转速负反馈和电流负反馈。
二者之间实行嵌套(或称串级)联接如下图所示。
L+-图中,把转速调节器的输出当作电流调节器的输入,再用电流调节器的输出去控制电力电子变换器UPE。
从闭环结构上看,电流环在里面,称作内环;转速环在外边,称作外环。
这就形成了转速、电流双闭环调速系统。
为了获得良好的静、动态性能,转速和电流两个调节器一般都采用P I 调节器,这样构成的双闭环直流调速系统的电路原理图示于下图。
图中标出了两个调节器输入输出电压的实际极性,它们是按照电力电子变换器的控制电压U c为正电压的情况标出的,并考虑到运算放大器的倒相作用。
2)数学建模图中W ASR(s)和W ACR(s)分别表示转速调节器和电流调节器的传递函数。
如果采用PI调节器,则有ss K s W i i iACR 1)(ττ+= ss K s W n n nASR 1)(ττ+=二、 设计方法采用工程设计法 1、设计方法的原则: (1)概念清楚、易懂; (2)计算公式简明、好记;双闭环直流调速系统的动态结构图(3)不仅给出参数计算的公式,而且指明参数调整的方向; (4)能考虑饱和非线性控制的情况,同样给出简单的计算公式; (5)适用于各种可以简化成典型系统的反馈控制系统。
2、工程设计方法的基本思路:(1)选择调节器结构,使系统典型化并满足稳定和稳态精度。
(2)设计调节器的参数,以满足动态性能指标的要求。
一般来说,许多控制系统的开环传递函数都可表示为∏∏==++=n1i irm1j j )1()1()(s T ss K s W τ上式中,分母中的 sr 项表示该系统在原点处有 r 重极点,或者说,系统含有 r 个积分环节。
根据 r=0,1,2,……等不同数值,分别称作0型、I 型、Ⅱ型、……系统。

异步电机运动控制系统电流调节器参数设计一、实验目的1.了解运动控制系统电流控制器的系统结构框图和硬件组成2.了解DSP实现数字式电流调节器3.掌握电流调节器参数调节对系统性能的影响二、实验设备三、实验线路和原理1、异步电动机电流调节器线路原理在电流调节器的线路中需要两路16位的数字PI调节器去调整D轴和Q轴的电流的值。
图2-1 异步电机电流调节器框图由上图可以看出,所测量的两相电流I a、I b先经3/2变化和旋转变换后转化为旋转坐标上的两个分量I d、I q。
图中的电流调节器为PI离散调节器,I d、I q在电流调节器中和I*d、I*q参考比较,计算得到的参考电压U*d和U*q,U*d和U*q 根据所提供的位置信息(Δθ)经逆变换后转换为提供给逆变器的相电压参考(U *a 、U *b 和U *c )。
根据这些参考电压,由DSP 生成的PWM 信号,经功率驱动级放大后输出调制波形电压。
2、电流调节器参数调节在本实验中电流回路通过一个离散的PI 调节器进行调节,其PI 调节的传递函数为:C Ts z Ki Kp z R _1)(1⨯-+=- 式中Kp 为电流调节器比例系数,Ki 为积分系数,Ts_C 为电流环取样时间。
Kp 、Ki 的系数通过调整电流环回路电流动态响应曲线来获取(如图2-2所示),通常是由闭环回路所希望的动态性能来完成的。
图2-2 电流控制回路结构图在MotionChip 芯片内部PI 调节器的执行如图2-3所示:图2-3 MotionChip 电流调节器执行原理由图可以看出,调节器需要外部输入下列参数:● I_ref :参考电流,由下列三种方式产生:参考发生器(电流/转矩模式)、速度调节器输出(配置了速度环)或位置/外部变量调节器输出(在位置模式且没有速度调节器),本实验直接由参考发生器产生,即Ib 。
● I_fbk :电流反馈,即Ia 。
调节器在外部信号输入到参考信号输出之间还需要一系列参数,这些参数将由“Motion Studio ”软件提供。
第2章 转速、电流双闭环直流调速系统和调节器的工程设计方法2.1 转速、电流双闭环直流调速系统及其静特性采用PI 调节的单个转速闭环直流调速系统可以在保证系统稳定的前提下实现转速无静差。
但是,如果对系统的动态性能要求较高,单闭环系统就难以满足需要,这主要是因为在单闭环系统中不能控制电流和转矩的动态过程。
电流截止负反馈环节是专门用来控制电流的,并不能很理想地控制电流的动态波形,图2-1a)。
在起动过程中,始终保持电流(转矩)为允许的最大值,使电力拖动系统以最大的加速度起动,到达稳态转速时,立即让电流降下来,使转矩马上与负载相平衡,从而转入稳态运行。
这样的理想起动过程波形示于图2-1b 。
为了实现在允许条件下的最快起动,关键是要获得一段使电流保持为最大值dm I 的恒流过程。
按照反馈控制规律,采用某个物理量的负反馈就可以保持该量基本不变,那么,采用电流负反馈应该能够得到近似的恒流过程。
应该在起动过程中只有电流负反馈,没有转速负反馈,达到稳态转速后,又希望只要转速负反馈,不再让电流负反馈发挥作用。
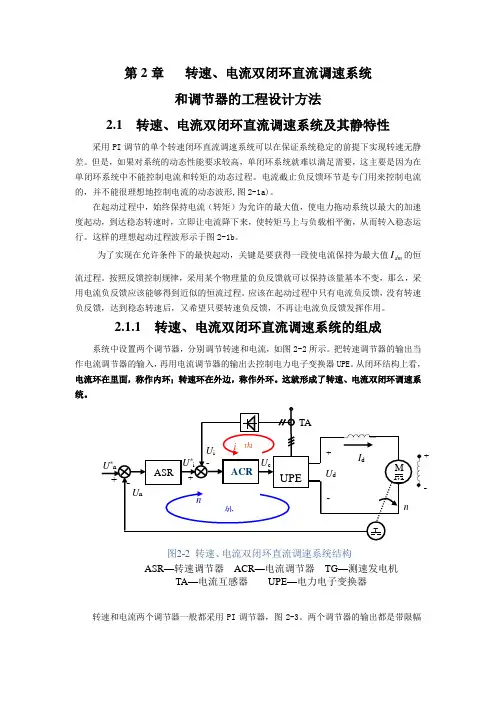
2.1.1 转速、电流双闭环直流调速系统的组成系统中设置两个调节器,分别调节转速和电流,如图2-2所示。
把转速调节器的输出当作电流调节器的输入,再用电流调节器的输出去控制电力电子变换器UPE 。
从闭环结构上看,电流环在里面,称作内环;转速环在外边,称作外环。
这就形成了转速、电流双闭环调速系统。
转速和电流两个调节器一般都采用PI 调节器,图2-3。
两个调节器的输出都是带限幅+TG nASRACRU*n+ -U nU iU*i+-U cTAM+-U dI dUPE-MT图2-2 转速、电流双闭环直流调速系统结构ASR —转速调节器 ACR —电流调节器 TG —测速发电机TA —电流互感器 UPE —电力电子变换器内外ni2作用的,转速调节器ASR 的输出限幅电压*im U 决定了电流给定电压的最大值,电流调节器ACR 的输出限幅电压cm U 限制了电力电子变换器的最大输出电压dm U 。
目录第一章设计任务分析 (1)1.1 课题的内容与要求 (1)1.2 系统概述 (1)第二章主电路分析和双闭环调速系统的组成 (2)主电路分析 (2)双闭环调速系统的组成 (2)第三章电流、转速调节器的设计 (4)电流调节器 (4)电流调节器原理图 (4)电流调节器参数选择 (4)转速调节器 (6)转速调节器原理图 (6)转速调节器参数选择 (7)第四章设计总结 (9)参考文献 (10)第一章设计任务分析1.1 课题的内容与要求设计题目:某车床直流双闭环有环流调速系统中电流调节器及转速调节器的设计为某钻床设计一个调速范围宽、起制动性能好的直流双闭环调速系统,且拟定该系统由大功率晶体管调制放大器给电动机供电。
已知系统中直流电动机主要数据如下:直流电动机:2KW,220V,136A,1460 r/min,Ce=0.132,允许过载倍数λ=1.5;晶闸管装置放大系数:Ks=40;电枢回路总电阻:R=0.5;时间常数:Tl=0.03,Tm=0.18;电流反馈系数:β=0.05V/A(≈10V/1.5In);转速反馈系数:α=0.007 min/r(≈10V/ nn)。
设计要求:设计电流调节器,要求电流超调量σi%≤5%,要求转速无静差,空载起运到额定转速时的转速超调量σn%≤10%。
按工程设计方法设计转速调节器,并校验转速超调量的要求能否得到满足。
1.2 系统概述直流双闭环调速系统的性能很好,具有调速范围广、精度高、动态性能好和易于控制等优点,所以在电气传动系统中得到了广泛的应用。
直流双闭环调速系统中设置了两个调节器, 即转速调节器(ASR)和电流调节器(ACR), 分别调节转速和电流。
本文对直流双闭环调速系统的设计进行了分析,对直流双闭环调速系统的原理进行了一些说明,介绍了其主电路、检测电路的设计,详细介绍了电流调节器和转速调节器的设计以及一些参数的选择和计算,使其满足工程设计参数指标。
第二章主电路分析和双闭环调速系统的组成用逻辑切换装置封锁不工作组晶闸管的触发脉冲,开放工作组晶闸管的触发脉冲,在任何时候不准两组晶闸管都有脉冲,从而切断了产生环流的通路,实现了无环流控制。

电流环PID 调节器设计大致流程以下设计过程主要参考文献[1],首先给出永磁同步电机参数表如下:电机的反电势会使电流输出与给定存在偏差,但低速时反电势较小,可通过调节器的控制消除, 因此设计时可忽略不计。
电流环传函结构图如图1所示,其中,v K 是逆变器电压放大倍数,表示逆变器直流侧电压与三角载波电压幅值之比,v τ是逆变器时间常数,与开关频率有关,s R 是电枢绕组电阻,q L 是交轴电感,β 是反馈系数, oi T 是反馈滤波时间常 数,ACR G 是电流调节器传递函数。
图1未加校正时的电流环开环传函如下:(1)()(1)v iob v q s oi K G S L S R T S βτ=+++ (1) 式中: v τ、oi T 是小时间常数, 因此可将控制对象等效:()[()1]v iob q s v oi K G L S R T S βτ=+++ (2) 电流调节器可选用 PI 调节器进行设计: 1p i ACR i K K S G K S+= (3) 用 PI 调节器的零点来抵消控制对象的大时间常数极点, 如下: 11q p i s L K K S S R +=+ (4) 得到电流环的开环传递函数:[()1]*v ik i oi v sK G K S T S R βτ=++ (5) 系统要求电流环具有较快的响应速度, 同时超调又不可过大, 因此令:()0.5v oi v i sK T K R βτ+= (6)设定逆变器开关频率为f=18kHz ,于是逆变器时间常数155.6v us fτ==,将15.5dc v s U K U ==、0.6β=、0.11ms oi T =和表1的电机参数代入到式(4)、式(6)中,得 6.5p K =,0.0022i K =。
加入 PI 调节器之前的系统开环幅相频率特性曲线如图2 所示, 系统明显不稳定; 加入 PI 调节器后得到的系统开环的幅相频率特性曲线如图 3 所示, 可见所设计的电流环是稳定的, 且有 45°左右的相角裕度。


如何设计电子电路的电流控制器电流控制器是电子电路中的重要组成部分,它可以用于稳定和调节电路中的电流,保护电子元件免受过载或短路的损坏。
本文将介绍如何设计电子电路的电流控制器,以及一些常见的电流控制器设计技巧。
一、电流控制器的原理电流控制器通过采用反馈控制的方式,监测电路中的电流大小,并根据设定值进行调节。
常见的电流控制器包括恒流源、电流限制器和电流保护器。
1. 恒流源恒流源是一种可以提供稳定电流的电路,它可以根据设计要求,输出恒定的电流给电路中的负载部分。
在设计恒流源时,需要考虑负载电流范围、恒流源的稳定性以及功耗等因素。
2. 电流限制器电流限制器可以限制电路中的电流值,保护电子元件免受过载的损害。
它通常包含一个电流传感器和一个比较器,当电路中的电流超过设定值时,比较器会控制开关以降低电流。
3. 电流保护器电流保护器用于保护电子电路免受短路等意外情况的损害。
当电路中出现短路时,电流保护器会迅速切断电路,防止电子元件受到电流过大的伤害。
二、电流控制器的设计步骤设计电流控制器需要考虑电路的要求和负载特性,以下是一般的设计步骤:1. 确定电流控制要求:根据电路的应用需求,确定所需的电流范围和稳定性要求。
2. 选择合适的电流传感器:根据负载的特性选择合适的电流传感器,例如霍尔效应传感器、电流互感器等。
传感器的准确性和响应速度对于电流控制的性能至关重要。
3. 设计反馈回路:根据电流传感器的输出信号,设计反馈回路以实现电流的稳定控制。
常用的反馈控制电路包括运算放大器、比例积分控制器等。
4. 配置功率驱动器:根据控制信号驱动负载电路,选择合适的功率驱动器,如功率放大器、开关器件等。
5. 考虑功耗和散热:在设计电流控制器时,需要考虑功耗和散热问题,以确保电路的长期稳定工作。
6. 进行仿真和实验验证:使用电子电路仿真软件进行仿真验证,并根据实验结果进行调整和优化。
三、电流控制器设计技巧在设计电流控制器时,可以考虑以下技巧来提高电流控制的性能和可靠性:1. 采用负反馈:通过引入负反馈回路,可以提高电流控制器的稳定性和准确性。
摘要转速、电流双闭环控制的直流调速系统是性能很好的直流调速系统,更是一种当前应用广泛、经济、适用的电力传动系统,它具有调速范围广、精度高、动态性能好和易于控制等优点,是各种交、直流电力拖动自动控制系统的重要基础,所以在电力传动系统中得到了广泛的应用。
基于设计题目,直流电动机调速控制器选用了转速、电流双闭环调速控制电路,调速系统的主电路采用了三相全控桥整流电路来供电。
本论文首先确定整个设计的方案和框图;然后确定主电路的参数以及框图中所需的电动机参数;本论文的重点设计是直流电动机的转速调节器和电流调节器的设计,分别调节转速和电流,即分别引入转速负反馈和电流负反馈,在直流调速系统起动过程中只有电流负反馈,达到稳态转速后,只要转速负反馈,二者之间实行串级联接。
从闭环结构上看,电流环在里面,称作内环;转速环在外边,称做外环。
这就形成了转速、电流双闭环调速系统。
转速和电流两个调节器都采用PI调节器,这样构成的双闭环直流调速系统就能获得良好的静、动态性能。
最后采用MATLAB/SIMULINK对整个调速系统进行了仿真分析,使其满足工程设计参数指标。
关键词:电力传动;双闭环;直流调速系统;电流调节器;转速调节器AbstractSpeed, current double closed loop control of DC speed regulation system is a very good performance of the DC motor speed control system, is also a kind of wide applications, economic, applicable to electric drive system, it has a wide speed range, high precision, good dynamic performance and easy to control, is all kinds of AC, DC electric drive automatic control system important basis, so in electric drive automatic control system has been widely used. Based on the design of the subject, the DC motor speed controller, the speed, current double closed loop speed control circuit, control system's main circuit adopts a three-phase full-bridge controlled rectifier circuit to supply power. This paper firstly determine the whole design scheme and block diagram; then to determine the parameters of the main circuit and the block diagram of the desired motor parameters; the focus of this paper is the design of DC motor speed regulator and current regulator design, respectively, to adjust the speed and current, which are respectively introduced into the speed negative feedback and current negative feedback, in DC control system start process only the current negative feedback, to achieve steady speed, as long as the speed negative feedback, two between implementation of cascade connection. From the closed loop structure, the current loop on the inside, known as the inner ring; the speed loop outside, called outer ring. This form of speed, current double closed loop speed regulation system. Speed and two current regulators have adopted PI regulator, the DC double loop speed control system can obtain good static, dynamic performance. Finally using the MATLAB / SIMULINK on the speed regulation system simulation and analysis are carried out, in order to meet the engineering design parameters.Key words:power transmission;double closed loop;DC speed control system;current regulator;speed regulator目录摘要 (I)Abstract (II)目录............................................................................................................................................... I II 第1章绪论.......................................................................................................................... - 1 -1.1 课题的背景、目的及意义......................................................................................... - 1 -1.2 课题研究的现状和发展趋势..................................................................................... - 1 -1.3 本课题采用的技术方案及技术难点......................................................................... - 2 -1.4 本设计的主要研究内容............................................................................................. - 3 -1.4.1 建立系统的数学模型...................................................................................... - 3 -1.4.2 经典控制部分.................................................................................................. - 3 -1.4.3仿真部分........................................................................................................... - 3 - 第2章双闭环调速系统的工作原理及数学模型.............................................................. - 4 -2.1 系统的参数测定......................................................................................................... - 4 -2.2 双闭环调速系统的工作原理..................................................................................... - 6 -2.2.1 转速控制的要求和调速指标.......................................................................... - 6 -2.2.2 调速系统的两个基本矛盾.............................................................................. - 7 -2.2.3 调速系统的双闭环调节原理.......................................................................... - 8 -2.2.4 双闭环调速系统的起动过程分析.................................................................. - 9 -2.2.5动态性能和转速、电流两个调节器的作用................................................. - 11 -2.3晶闸管—电动机主电路的设计................................................................................ - 12 -2.4 主电路参数计算....................................................................................................... - 13 -2.5 主电路的过电压和过电流保护............................................................................... - 14 -2.5.1 过电压保护.................................................................................................... - 14 -2.5.2 过电流保护.................................................................................................... - 14 - 第3章按工程设计方法设计双闭环调速系统的电流调节器和转速调节器.................. - 15 -3.1设计要求.................................................................................................................... - 15 -3.1.1基本数据(其中包括铭牌数据和测试数据)............................................. - 15 -3.1.2 设计指标........................................................................................................ - 16 -3.1.3 工程设计方法的基本思路............................................................................ - 16 -3.2电流调节器额定设计................................................................................................ - 17 -3.2.1电流环动态结构图的简化............................................................................. - 17 -3.2.2电流调节器结构的选择................................................................................. - 18 -3.2.3 电流调节器参数的计算................................................................................ - 19 -3.2.4电流环的动态性能指标................................................................................. - 20 -3.3转速调节器的设计.................................................................................................... - 21 -3.3.1电流环的等效闭环传递函数......................................................................... - 21 -3.3.2转速环的动态结构图及其近似处理............................................................. - 21 -3.3.3 转速调节器结构的选择.............................................................................. - 22 -3.3.4 转速调节器参数的计算................................................................................ - 24 -3.3.5 转速环的抗扰性能指标................................................................................ - 26 -3.4电流环、转速环开环对数幅频特性的比较............................................................ - 27 - 第4章调速系统性能指标的数字仿真.............................................................................. - 29 -4.1 基于工程设计的数字仿真....................................................................................... - 29 -4.2 时域分析................................................................................................................... - 30 - 参考文献.................................................................................................................................. - 31 - 结束语...................................................................................................................................... - 32 - 致谢.......................................................................................................................................... - 33 -第1章绪论1.1 课题的背景、目的及意义20世纪90年代前的大约50年的时间里,直流电动机几乎是唯一的一种能实现高性能拖动控制的电动机,直流电动机的定子磁场和转子磁场相互独立并且正交,为控制提供了便捷的方式,使得电动机具有优良的起动,制动和调速性能。
运动控制系统期中考试电控学院自动化0905贺奎()解: 电流调节器设计 (1) 拟定期间常数1)整流装置滞后时间常数。
三相桥式电路平均失控时间=0.0017s 。
2)流滤波时间常数。
据题意给定=0.002s 。
3)电流环小时间常数之和。
按小时间常数近似解决=S T +oi T =0.0037s 。
4)电磁时间常数。
5)电力拖动系统机电时间常数。
因此(2)选取调节器构造依照设计规定,并保证稳态电流无差,可按典I设计电流调节器。
电流环控制对象是双惯性型,因而可用PI 调节器。
传递函数为。
检核对电源电压抗扰性能:,其动态性能指标都可以接受。
(3)计算电流调节器参数 电流调节器超前时间常数:。
电流环开环增益:规定时,应取,因而于是,ACR 比例系数为(4)校验近似条件 电流环戒指频率:1)校验晶闸管整流装置传递函数近似条件满足近似条件2)校验忽视反电动势变化对电流环动态影响条件满足近似条件3)校验电流环小时间常数近似解决条件满足近似条件(5)计算调节器电阻和电容取取40取0.75取0.2转速调节器设计(1)拟定期间常数1)电流环等效时间常数。
,则2)转速滤波时间常数。
依照题意。
3)转速环小时间常数。
按小时间常数近似解决,取(2)选取转速调节器构造按照设计规定,选用PI调节器,其传递函数为(3)计算转速调节器参数按跟随和抗扰性能都较好原则,取h=5,则ASR超前时间常数为转速环开环增益ASR比例系数为(4)检查近似条件转速环截止频率为1)电流环传递函数简化条件满足条件2)转速环小时间常数近似解决条件满足条件(5)计算调节器电阻电容取取470取0.2取1(6)校验转速超调量①②联立①②得符合设计规定综上所述触发电路控制电压Uk输出电路和反馈电路某些电路电源某些整流某些和反馈电路某些电路整流各元件同步电压Port5所接晶闸管晶闸管VT1 VT2 VT3 VT4 VT5 VT6Port4所接同步电源-usc Usb -usa Usc -usb usa系统构造框图为一、原理图实现直流调速系统原理:(1)通过实验调节RP3使得电流反馈系数即电流反馈电压与电枢电流之比为0.05(2)通过实验调节RP2使得转速反馈系数即转速反馈电压与转速之比为0.007(3)通过实验调节R1和C1,使得触发电路R1和C1构成一种滞后/3滤波电路,这样由于余弦交点触发电路输出相位与控制电压成比例关系,从而控制整个整流电路触发,从而控制电机转速(4)接下来就是电机控制运营当电机刚启动时,由于电机转速变化很慢,几乎等于0,此时转速环饱和,电流环起作用,且电流环给定达到最大值,使得电枢电流达到最大值,此时得到最大转速加速度,电机以定加速度上升直至转速达到n最大值,此时,电动机仍旧由于转速环是积分环节使得电动机仍加速,当转速超过给定值时,转速环节输入偏差为负,使它退出饱和,电枢电流不久下降,此时电流环节饱和,转速环起作用。
电路电流调节器及转速调节器的设计20220525一、设计题目双闭环V-M调速系统中主电路电流调节器及转速调节器的设计二、具体内容(1)主回路及其保护系统的设计;(2)转速、电流调节器及其限幅电路的设计;三、已知条件及直流电机相关参数采用晶闸管三相桥式全控整流电路供电,基本数据如下:直流电动机UN=220V,IN=136A,nN=1460r/min,电枢电阻Ra=0.2Ω,允许过载倍数λ=1.5;晶闸管装置T=0.00167,放大系数K=40;平波电抗器:电阻RP0.1、电感LP4mH;电枢回路总电阻R=0.5Ω;电枢回路总电感L=15mH;电动机轴上的总飞轮惯量GD2=22.5N·m2;电流调节器最大给定值Uim=10.2V,转速调节器最大给定值Unm=10.5V;电流滤波时间常数Toi=0.002,转速滤波时间常数Ton=0.01。
设计要求:1.稳态指标:转速无静差;2.动态指标:电流超调量i5%;空载启动到额定转速的转速超调量n10%。
四、设计要求1.写出设计说明书,内容包括(1)各主要环节的工作原理;(2)整个系统的工作原理;(3)调节器参数的计算过程。
2.画出一张详细的电气原理图3.采用Matlab中的Simulink软件对整个调速系统进行仿真研究,对计算得到的调节器参数进行校正,验证设计结果的正确性。
将Simulink仿真模型,以及启动过程中的电流、转速波形图附在设计说明书中。
五、参考文献1.阮毅,陈维钧.运动控制系统.清华大学出版社,20062.陈伯时.电力拖动自动控制系统——运动控制系统(第3版).机械工业出版社,20033.童福尧.电力拖动自动控制系统习题例题集.机械工业出版社,19934.尔桂花,窦曰轩.运动控制系统.清华大学出版社,20025.廖晓钟,刘向东.自动控制系统.北京理工大学出版社,20056.曾毅.现代运动控制系统工程.机械工业出版社,20067.余发山等.自动控制系统.中国矿业大学出版社,20058.黄俊,王兆安.电力电子变流技术(第3版).机械工业出版社,20019.李华德等.电力拖动控制系统(运动控制系统).电子工业出版社,2006六、考核方式考核方式分为课程设计报告和答辩。
设计题目1:电流、转速双闭环调节器设计设计内容:1.转速调节器ASR 及电流调节器ACR 的设计2.转速反馈和电流反馈电路设计3.集成触发电路设计4.主电路及其保护电路设计设计要求:1.转速调节器ASR (%5≤n σ);2.电流调节器ACR (%5≤i σ)设计题目2:单闭环交流电机调压调速系统设计内容:1.实现交流电动机调压调速系统2.实现交流电动机开环调速3.实现交流电动机的闭环调速设计要求:1.交流电动机开环调速(n≤1500rpm )2.交流电动机闭环调速(n≤1000rpm )3.用MATLAB 软件进行仿真设计题目3:基于矢量控制的PMSM 高性能伺服调速系统设计内容:空间电压矢量的宽调制技术使得交流电机能够获得和直流电机相媲美的性能。
而PMSM 矢量控制系统采用C 语言Q 格式编程技术使系统达到较高的性能指标,位置环30000个脉冲给定值(电机转3圈),调节时间为0.15s 。
设计要求:1.了解空间矢量脉宽调制原理。
2.了解永磁同步电机(PMSM )。
3.掌握基于矢量控制的PMSM 高性能伺服调速系统的设计方法。
设计题目4:绕线式异步电动机串级调速系统设计设计内容:本设计主要内容是绕线式异步电动机的串级调速系统主电路和触发电路的设计。
其中主电路的设计包括可控整流电路、不可控整流电路和逆变变压器;触发电路主要包括KC 系列的移相触发电路和ULN2003。
考虑到系统运行时可能出现的问题,相应的设计了系统的保护电路。
设计要求:1.设计串级调速主电路;2.选择和设计串级调速触发电路;3.针对过电压、过电流产生的原因采取恰当的保护措施,设计合适保护电路。
设计题目5:无刷直流电机的数学建模与仿真设计内容:掌握无刷直流电机的工作原理,掌握无刷直流电机的数学建模方法设计要求:1.完成MA TLAB 中simulink 环境下无刷直流电机的双闭环控制系统的仿真设计题目6:转速、直流双闭环调速系统设计内容:主电路采用三相可控晶闸管整流电路,整流装置采用三相桥式电路,用PI 调节器控制,通过改变直流电动机的电枢电压进行调速,学会使用MA TLAB 软件的使用。
双闭环直流调速系统设计举例例题2-1:某晶闸管供电的双闭环直流调速系统,整流装置采用三相桥式电路,根本数据如下:直流电动机:220V、136A、1460r/min,Ce=0.132V﹒min/r,允许过载倍数λ=1.5。
晶闸管装置放大系数Ks =40。
电枢回路总电阻R=0.5时间常数电流反应系数β=0.062V/A〔β≈10V/1.5I N〕试按工程方法设计电流调节器,设计要求如下要求稳态指标:电流无静差; 动态指标:电流超调量<5%。
双闭环直流调速系统构造图如下双闭环直流调速系统电流环的设计-I dLU d0 U n+ --+- U iACR1/RT l s+1 R T m sU *iU cK sT s s+1 I d1 C e+EβT 0i s+1 1 T 0is+1 ASR 1 T 0n s+1αT 0n s+1U *n n1.确定时间常数(1)整流装置滞后时间常数Ts。
三相桥式电路的平均失控时间T s=0.0017s。
〔2〕电流滤波时间常数三相桥式电路每个波头的时间是3.33ms,为了根本滤平波头,应有〔l~2〕=3.33ms,因此取=2ms=0.002s。
〔3〕电流环小时间常数;按小时间常数近似处理,取=0.0037s。
2.选择电流调节器构造根据设计要求:5%,而且因此可按典型1型系统设计。
电流调节器选用PI型,其传递函数为3.选择电流调节器参数ACR超前时间常数:== 0.03s。
电流环开环增益:要求5%时,应取=0.5因此于是,ACR的比例系数为4.校验近似条件电流环截止频率s-1(1)晶闸管装置传递函数近似条件﹤现在=s-1>满足近似条件〔2〕忽略反电动势对电流环影响的条件:;现在,=满足近似条件。
〔3〕小时间常数近似处理条件:=满足近似条件。
5. 计算调节器电阻和电容取R。
=40,各电阻和电容值计算如下,取32, 取0.75=0.2 取0.2按照上述参数,电流环可以到达的动态指标为:σi%=4.3%<5%,满足设计要求。
2线式电流调节器本设计实例是一个2线式电流调整器(图1),它在性能和器件数目之间达到了很好的平衡。
通过使用三个晶体管、三个电阻和一个LED灯,可实现很好的调整效果(在大部分电压范围内精确度好于1%)、较低的工作电压(通常为1.2V),以及比简单度相同的其他电路更抱负的温度系数(0.07%/K)。
它可在从几十毫安到几安的电流范围下运行。
要找到合适的器件并不困难,例如,LM10可用来制作性能更高的电路,但该IC没有许多厂商可供货,因此很可能消失停产。
图1:2线式电流调整器。
红外LED用作约1.05V的基准,由自举电流源Q1驱动。
Q2和Q3形成主电流调整器。
R1供应启动电流,R2设定参考电流的大小,R3设定流过Q2的电流,其掌握流过调整器的99%的电流。
在启动时,R1的全部电流流入Q3的基极,其反过来使Q1和Q2导通,从而为Q3供应更多电流。
这一状况将持续到D1开头导通且R3的电流形成足够电压来开头关闭Q3,从而产生负反馈。
由于Q3调整Q2的电流,它也调整Q1的电流-其获得相同偏置,但其放射极电阻R2将电流缩小。
此时,Q1和Q2的电流将稳定在R3或R2(较小程度上)所设定的值上。
维持Q1电流恒定要求其热耦合到Q2,由于Q2将耗散掉电路内大部分功率。
实现这一点最简单的方式是Q1和Q2采纳相同的晶体管,并将Q1和Q2通过螺栓固定在散热器两边。
此外,还可将Q1黏附在Q2上。
在低电流状况下,可选用一个双晶体管。
第四种选择是放弃热跟踪,通过降低R1来进行补偿。
由于Q2的耗散功率将是电压的函数,这使Q1的电流降低也为电压的函数,从而可以通过R1进行补偿。
但是,全部四种方法将在电源突然发生变化时导致热瞬变,最终一种方法造成的热瞬变幅度最大且时间最长。
Q2的电流由D1的电压和Q3的VBE(通常为0.3V~0.4V)之间的差值除以R3,即(VD1-VBE)/R3设定。
D1正向电压的温度系数几乎与Q3的相同(相差0.25mV/K),从而使调整器的总温度系数约为0.07%/K。
双闭环直流调速系统设计举例
例题2-1:某晶闸管供电得双闭环直流调速系统,整流装置采用三相桥式电路,基本
数据如下:
直流电动机: 220V、136A、 1460r /min, Ce=0、132V﹒min/r,允许过载倍数λ=1、5。
晶闸管装置放大系数Ks =40。
电枢回路总电阻R=0、5
时间常数
电流反馈系数β=0、062V/A(β≈10V/1.5I N)
试按工程方法设计电流调节器,设计要求如下
要求稳态指标:电流无静差;
动态指标:电流超调量<5%。
双闭环直流调速系统结构图如下
双闭环直流调速系统电流环得设计
1.确定时间常数
(1)整流装置滞后时间常数Ts 。
-I dL
U d0 U n
+
-
-
+
-
U i
ACR
1/R
T l s+1 R
T m s
U *i
U c
K s
T s s+1 I d
1 C e
+
E
β
T 0i s+1 1 T 0i
s+1 ASR 1 T 0n s+1 α
T 0n s+1
U *n n
三相桥式电路得平均失控时间Ts=0、0017s。
(2)电流滤波时间常数
三相桥式电路每个波头得时间就是3.33ms,为了基本滤平波头,应有(l~2)=3.33ms,
因此取=2ms=0、002s。
(3)电流环小时间常数;按小时间常数近似处理,取=0、0037s。
2.选择电流调节器结构
根据设计要求:5%,而且
因此可按典型1型系统设计。
电流调节器选用PI型,其传递函数为
3.选择电流调节器参数
ACR超前时间常数:== 0、03s。
电流环开环增益:要求5%时,应取
=0、5因此
于就是,ACR得比例系数为
4.校验近似条件
电流环截止频率s-1
(1)晶闸管装置传递函数近似条件
﹤
现在 = s-1>
满足近似条件
(2)忽略反电动势对电流环影响得条件:; 现在, =
满足近似条件。
(3)小时间常数近似处理条件:
=
满足近似条件。
5、计算调节器电阻与电容
取R。
=40,各电阻与电容值计算如下
,取32
, 取0、75
=0、2 取0、2
按照上述参数,电流环可以达到得动态指标为:σi%=4、3%<5%,满足设计要求。