工业机器人机械装配 第二章
- 格式:ppt
- 大小:5.05 MB
- 文档页数:10


培训章节模块1 FANUC工业机器人装配工作授课形式讲练授课时间第周周(月日)第至节培训目标知识目标:1.掌握机器人和工业机器人的定义。
2.了解工业机器人的应用领域和功能作用。
3.掌握工业机器人的概念。
能力目标:1.能正确认识工业机器人的工业应用。
培训重点1. 1.掌握工业机器人的应用范围2.了解工业机器人的组成培训难点 1.理解工业机器人的重要参数教学场地及教具使用教材、PPT、电脑培训过程方法手段时间分配导入及任务布置交流培训方式和要求学习任务:1.学习了解工业机器人的定义。
2.了解工业机器人的系统组成和机器人本体的组成。
3.了解工业机器人的重要的技术参数及含义。
5分钟重点讲解及任务分析1.重点任务讲解工业机器人的组成和关键技术参数的含义和作用2.举例不同型号的工业机器人在关键参数上的异同,对其工作能力的影响20分钟20分钟45分钟练习或训练无 45分钟(与教师操作同步)难点分析及总结1.难点是定位精度和重复定位精度的定义和其含义的区别的理解10分钟(与操作同步)布置作业课后搜集资料制作PPT演示文稿,讲解工业机器人和机器人的区别。
以及当前工业机器人的应用领域和典型案例培训章节模块1 FANUC工业机器人装配工作站第2章工业机器人装配工作站的组成和功能授课形式讲练授课时间第周周(月日)第至节培训目标知识目标:1.掌握工业机器人装配工作站的组成内容。
2.了解装配工作站的各部分的功能。
能力目标:1.能正确认识工业机器人的工业应用。
培训重点1.掌握 FANUC工业机器人装配工作站的组成2.了解 FANUC工业机器人装配工作站的功能培训难点 1.理解 FANUC工业机器人装配工作站各组成部件的功能教学场地及教具使用教材、PPT、电脑、工业机器人实训平台培训过程方法手段时间分配导入及任务布置学习任务:1.学习了解 FANUC工业机器人装配工作站的组成。
2.了解 FANUC工业机器人装配工作站的各部件功能和总体功能。
第一章课后习题1、工业机器人定义:是机器人的一种,由操作机、控制器、伺服驱动系统和检测传感装置构成,是一种仿人操作、自动控制、可重复编程、能在三维空间内完成各种作业的机电一体化的自动化生产设备。
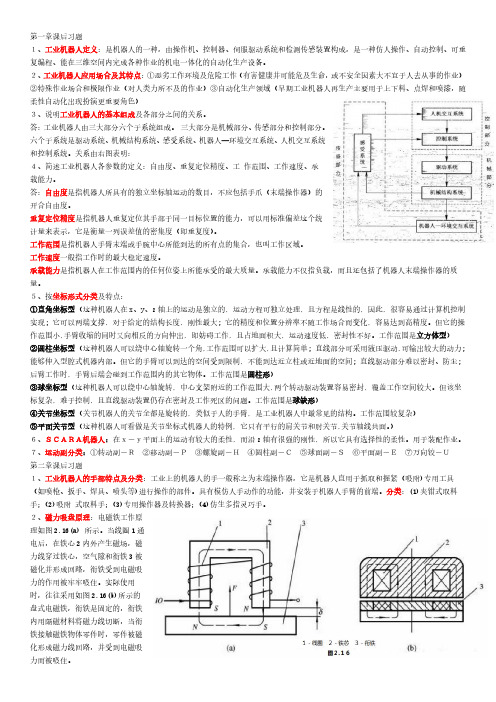
2、工业机器人应用场合及其特点:①恶劣工作环境及危险工作(有害健康并可能危及生命,或不安全因素大不宜于人去从事的作业)②特殊作业场合和极限作业(对人类力所不及的作业)③自动化生产领域(早期工业机器人再生产主要用于上下料、点焊和喷漆,随柔性自动化出现扮演更重要角色)3、说明工业机器人的基本组成及各部分之间的关系。
答:工业机器人由三大部分六个子系统组成。
三大部分是机械部分、传感部分和控制部分。
六个子系统是驱动系统、机械结构系统、感受系统、机器人—环境交互系统、人机交互系统和控制系统。
关系由右图表明:4、简述工业机器人各参数的定义:自由度、重复定位精度、工 作范围、工作速度、承载能力。
答:自由度是指机器人所具有的独立坐标轴运动的数目,不应包括手爪(末端操作器)的开合自由度。
重复定位精度是指机器人重复定位其手部于同一目标位置的能力,可以用标准偏差这个统计量来表示,它是衡量一列误差值的密集度(即重复度)。
工作范围是指机器人手臂末端或手腕中心所能到达的所有点的集合,也叫工作区域。
工作速度一般指工作时的最大稳定速度。
承载能力是指机器人在工作范围内的任何位姿上所能承受的最大质量。
承载能力不仅指负载,而且还包括了机器人末端操作器的质量。
5、按坐标形式分类及特点:①直角坐标型(这种机器人在x、y、z轴上的运动是独立的, 运动方程可独立处理, 且方程是线性的, 因此, 很容易通过计算机控制实现; 它可以两端支撑, 对于给定的结构长度, 刚性最大; 它的精度和位置分辨率不随工作场合而变化, 容易达到高精度。
但它的操作范围小,手臂收缩的同时又向相反的方向伸出, 即妨碍工作, 且占地面积大, 运动速度低, 密封性不好。
工作范围是立方体型)②圆柱坐标型(这种机器人可以绕中心轴旋转一个角,工作范围可以扩大,且计算简单; 直线部分可采用液压驱动,可输出较大的动力; 能够伸入型腔式机器内部。


工业机器人技术试题库与答案工业机器人技术题库及答案一、判断题第一章1、工业机器人由操作机、控制器、伺服驱动系统和检测传感装置构成。
√2、被誉为“工业机器人之父”的XXX最早提出了工业机器人概念。
×(删除)3、工业机器人的机械结构系统由基座、手臂、手腕、末端操作器4大件组成。
×(改为:工业机器人的机械结构系统主要由基座、手臂、手腕和末端操作器组成。
)4、示教盒属于机器人-环境交互系统。
×(删除)5、直角坐标机器人的工作范围为圆柱形状。
×(改为:直角坐标机器人的工作范围为立方体形状。
)6、机器人最大稳定速度高,允许的极限加速度小,则加减速的时间就会长一些。
√7、承载能力是指机器人在工作范围内的特定位姿上所能承受的最大质量。
×(改为:承载能力是指机器人能够承受的最大质量。
)第二章1、工业机器人的机械部分主要包括末端操作器、手腕、手臂和机座。
√2、工业机器人的机械部分主要包括末端操作器、手腕、手肘和手臂。
×(改为:工业机器人的机械部分主要包括末端操作器、手腕、手臂和机座。
)3、工业机器人的手我们一般称为末端操作器。
√4、齿形指面多用来夹持表面粗糙的毛坯或半成品。
√5、吸附式取料手适应于大平面、易碎、微小的物体。
√6、柔性手属于仿生多指灵巧手。
√7、摆动式手爪适用于圆柱表面物体的抓取。
√8、柔顺性装配技术分两种:主动柔顺装配和被动柔顺装配。
√9、一般工业机器人手臂有4个自由度。
×(改为:一般工业机器人手臂有6个自由度。
)10、机器人机座可分为固定式和履带式两种。
×(改为:机器人机座可分为固定式和移动式两种。
)11、行走机构按其行走运动轨迹可分为固定轨迹和无固定轨迹两种方式。
√12、机器人手爪和手腕最完美的形式是模仿人手的多指灵巧手。
√13、手腕按驱动方式来分,可分为直接驱动手腕和远距离传动手腕。
√第三章1、正向运动学解决的问题是:已知手部的位姿,求各个关节的变量。
培训章节模块1 FANUC工业机器人装配工作授课形式讲练授课时间第周周(月日)第至节培训目标知识目标:1.掌握机器人和工业机器人的定义。
2.了解工业机器人的应用领域和功能作用。
3.掌握工业机器人的概念。
能力目标:1.能正确认识工业机器人的工业应用。
培训重点1. 1.掌握工业机器人的应用范围2.了解工业机器人的组成培训难点 1.理解工业机器人的重要参数教学场地及教具使用教材、PPT、电脑培训过程方法手段时间分配导入及任务布置交流培训方式和要求学习任务:1.学习了解工业机器人的定义。
2.了解工业机器人的系统组成和机器人本体的组成。
3.了解工业机器人的重要的技术参数及含义。
5分钟重点讲解及任务分析1.重点任务讲解工业机器人的组成和关键技术参数的含义和作用2.举例不同型号的工业机器人在关键参数上的异同,对其工作能力的影响20分钟20分钟45分钟练习或训练无 45分钟(与教师操作同步)难点分析及总结1.难点是定位精度和重复定位精度的定义和其含义的区别的理解10分钟(与操作同步)布置作业课后搜集资料制作PPT演示文稿,讲解工业机器人和机器人的区别。
以及当前工业机器人的应用领域和典型案例培训章节模块1 FANUC工业机器人装配工作站第2章工业机器人装配工作站的组成和功能授课形式讲练授课时间第周周(月日)第至节培训目标知识目标:1.掌握工业机器人装配工作站的组成内容。
2.了解装配工作站的各部分的功能。
能力目标:1.能正确认识工业机器人的工业应用。
培训重点1.掌握 FANUC工业机器人装配工作站的组成2.了解 FANUC工业机器人装配工作站的功能培训难点 1.理解 FANUC工业机器人装配工作站各组成部件的功能教学场地及教具使用教材、PPT、电脑、工业机器人实训平台培训过程方法手段时间分配导入及任务布置学习任务:1.学习了解 FANUC工业机器人装配工作站的组成。
2.了解 FANUC工业机器人装配工作站的各部件功能和总体功能。