ABB工业机器人编程-第二章
- 格式:ppt
- 大小:3.73 MB
- 文档页数:53
工业机器人操作与编程(ABB)教学大纲一、说明1.课程的性质和内容《工业机器人操作与编程(ABB)》课程是技师学院工业机器人应用与维护专业的专业课。
主要内容包括:ABB机器人基础知识及手动操作、ABB机器人的IO 配置、ABB机器人程序数据、ABB机器人程序的编写、ABB机器人的总线通信、ABB机器人TCP练习、ABB机器人搬运垛、ABB机器人智能分拣。
2.课程的任务和要求本课程的主要任务是培养学生熟练操作ABB机器人,能够独立完成机器人的基本操作,能够根据工作任务对ABB机器人进行程序编写,为学生从事专业工作打下必要的专业基础。
(1)通过本课程的学习,学生应该达到以下几个方面的专业基础。
(2)熟悉ABB机器人安全注意事项,掌握示教器的各项操作。
(3)掌握ABB机器人的基本操作,理解系统参数配置;学会手动操纵。
(4)掌握ABB机器人的I/O标准板的配置,学会定义输入、输出信号,了解Profibus适配器的连接。
(5)掌握ABB机器人的各种程序数据类型,熟悉工具数据、工件坐标、有效载荷数据的设定。
(6)掌握RAPID程序及指令,并能对ABB机器人进行编程和调试。
(7)熟悉ABB机器人的硬件连接。
3.教学中应该注意的问题(1)本课程的教学以ABB机器人的应用。
维护为主,注意培养学生对机器人编程和维护的能力。
(2)在本课程的教学中应该注意培养学生的逻辑思维能力。
(3)编程教学时,应让学生重点掌握机器人的数据类型和指令功能。
二、学时分配表三、课程内容及要求项目一 ABB机器人基础知识及手动操作教学要求1.了解工业机器人的发展及机器人安全注意事项。
2.掌握ABB机器人示教器的使用3.掌握示教器上基本的功能操作。
教学内容任务一工业机器人的概述和安全注意事项任务二认识示教器——配置必要的操作环境任务三ABB机器人事件信息查询及数据备份与恢复任务四ABB机器人的手动操纵任务五ABB机器人的转数计数器更新操作教学建议本项目的主要教学目标是激发学生对工业机器人学习的兴趣。
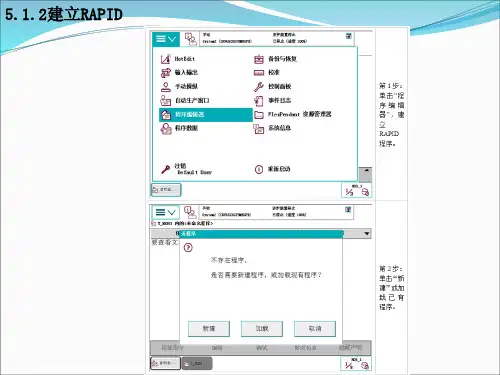
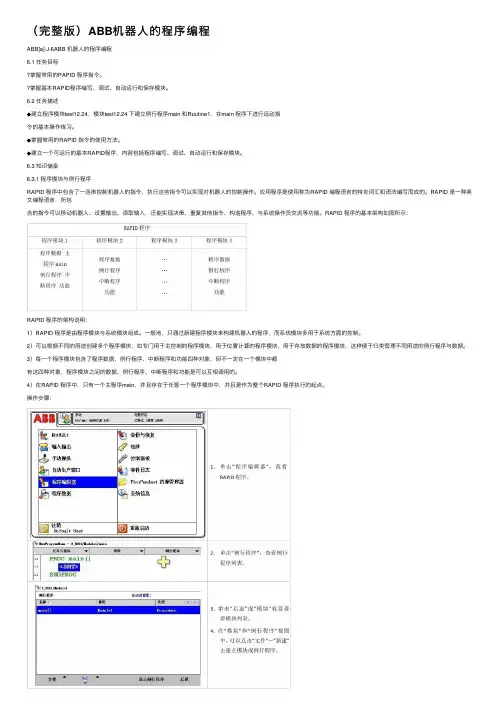
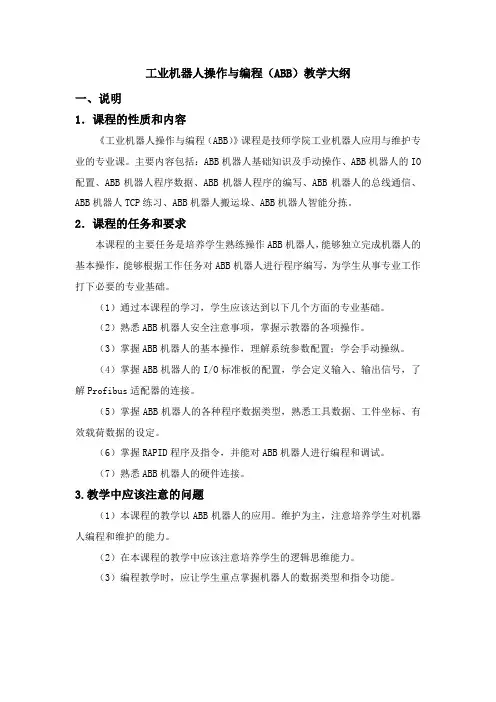
(完整版)ABB机器⼈的程序编程ABB[a]-J-6ABB 机器⼈的程序编程6.1 任务⽬标掌握常⽤的PAPID 程序指令。
掌握基本RAPID程序编写、调试、⾃动运⾏和保存模块。
6.2 任务描述◆建⽴程序模块test12.24,模块test12.24 下建⽴例⾏程序main 和Routine1,在main 程序下进⾏运动指令的基本操作练习。
◆掌握常⽤的RAPID 指令的使⽤⽅法。
◆建⽴⼀个可运⾏的基本RAPID程序,内容包括程序编写、调试、⾃动运⾏和保存模块。
6.3 知识储备6.3.1 程序模块与例⾏程序RAPID 程序中包含了⼀连串控制机器⼈的指令,执⾏这些指令可以实现对机器⼈的控制操作。
应⽤程序是使⽤称为RAPID 编程语⾔的特定词汇和语法编写⽽成的。
RAPID 是⼀种英⽂编程语⾔,所包含的指令可以移动机器⼈、设置输出、读取输⼊,还能实现决策、重复其他指令、构造程序、与系统操作员交流等功能。
RAPID 程序的基本架构如图所⽰:RAPID 程序的架构说明:1)RAPID 程序是由程序模块与系统模块组成。
⼀般地,只通过新建程序模块来构建机器⼈的程序,⽽系统模块多⽤于系统⽅⾯的控制。
2)可以根据不同的⽤途创建多个程序模块,如专门⽤于主控制的程序模块,⽤于位置计算的程序模块,⽤于存放数据的程序模块,这样便于归类管理不同⽤途的例⾏程序与数据。
3)每⼀个程序模块包含了程序数据、例⾏程序、中断程序和功能四种对象,但不⼀定在⼀个模块中都有这四种对象,程序模块之间的数据、例⾏程序、中断程序和功能是可以互相调⽤的。
4)在RAPID 程序中,只有⼀个主程序main,并且存在于任意⼀个程序模块中,并且是作为整个RAPID 程序执⾏的起点。
操作步骤:6.3.2 在⽰教器上进⾏指令编程的基本操作ABB 机器⼈的RAPID 编程提供了丰富的指令来完成各种简单与复杂的应⽤。
下⾯就从最常⽤的指令开始学习RAPID 编程,领略RAPID 丰富的指令集提供的编程便利性。
工业机器人应用编程职业技能等级(ABB中级)实操考核任务书(一)模块2考生须知:1.本任务书共 6 页,如出现任务书缺页、字迹不清等问题,请及时向考评人员申请更换任务书。
2.请仔细研读任务书,检查考核平台,如有模块缺少、设备问题,请及时向考评人员提出。
3.请在120分钟内完成任务书规定内容。
4.由于操作不当等原因引起工业机器人控制器及I/O组件、PLC等的损坏以及发生机械碰撞等情况,将依据扣分表进行处理。
5.考核现场不得携带任何电子存储设备。
6.考核平台参考资料以pdf格式存放在“D:\1+X考核\参考资料”文件夹下。
7.考核过程中,请及时保存程序及数据,保存到“D:\1+X考核\**号工位”指定文件夹中。
8.考核平台已内置部分程序,考生可以直接在平台程序上进行编程。
9.考核时间结束后进行统一评判。
10.请服从考评人员的管理与安排。
场次:工位号:日期:二0二0年十二月现有一台工业机器人智能检测和装配工作站,工作站由ABB 工业机器人、上料单元、输送单元、快换装置、立体库、变位机单元、绘图模块、视觉检测单元等组成,智能检测与装配工作站各模块布局如图1所示。
关节坐标系下工业机器人工作原点位置为[0°,-20°,20°,0°,90°,0°]。
绘图模块快换装置立体库RFID检测模块输送带上料单元装配模块变位机视觉模块图1 智能检测与装配工作站模块布局图工业机器人所用末端工具如图2所示。
其中弧口手爪工具用于取放关节底座、直口手爪工具用于取放电机、吸盘工具用于取放输出法兰。
(a )弧口手爪工具 (b )直口手爪工具 (c )吸盘工具 (d )绘图笔工具图2 工业机器人末端工具工业机器人智能检测与装配工作站三个装配零件如图3下所示:(a)关节底座(b)电机(c)减速机(d)输出法兰图3装配零件工业机器人关节部件的装配步骤:步骤①:关节底座在装配模块上正确定位;步骤②:电机装配到关节底座中;步骤③:输出法兰装配到关节底座中(嵌入卡槽后顺时针旋转90度锁定);步骤④:装配好的关节成品返回立体库指定位置。